
Influence of the Compliance of a Technological System on the Machining Accuracy of Low-Stiffness Shafts in the Grinding Process

Abstract
:1. Introduction
2. Influence of the Compliance of the Technological System on the Accuracy of the Shape during Grinding
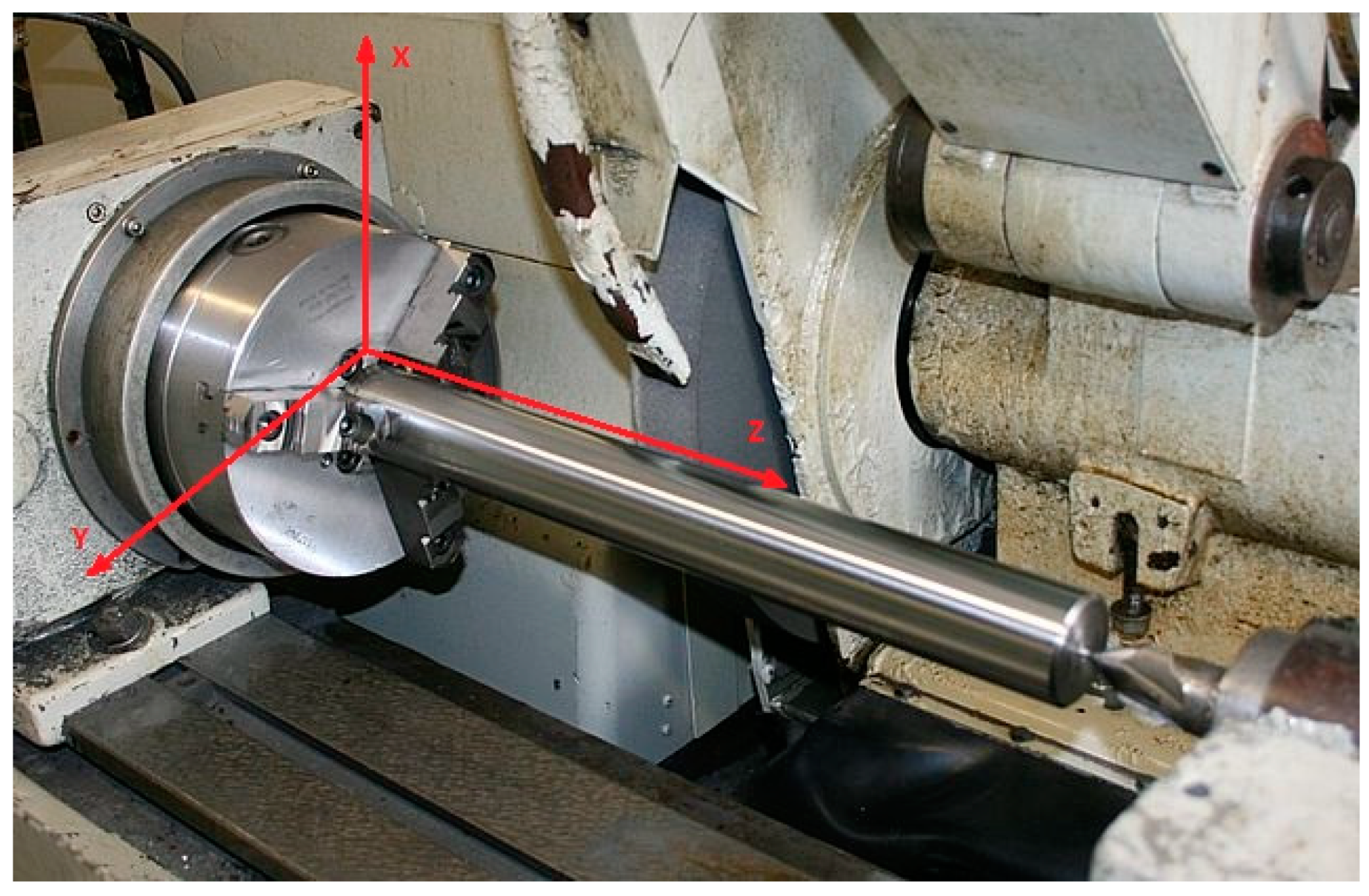
- Fp—resistive (radial) cutting force component;
- x—distance of the force application point from the end of the shaft;
- L—length of the part;
- js, jt, jgw—stiffness of the spindle, tailstock, and grinding wheel, respectively;
- E—Young’s modulus;
- I—moment of the section inertia.
- Kr—a coefficient that depends on the stiffness of the technological system, process parameters, and grinding conditions;
- f—feed;
- d—diameter of the part.
- —absolute deviation of curve 6.
3. An Experimental Study on Increasing Machining Accuracy
3.1. General Characteristics of the Experimental Stand and the Experimental Procedure
- −
- the stiffness of the centers significantly exceeded the stiffness of the semi-finished product (compliance was not leveled out or adjusted);
- −
- the compliance of the centers was double the compliance of the semi-finished product and did not change throughout the machining process (passive compliance compensation);
- −
- the centers’ compliance was adjusted along the machined surface;
- −
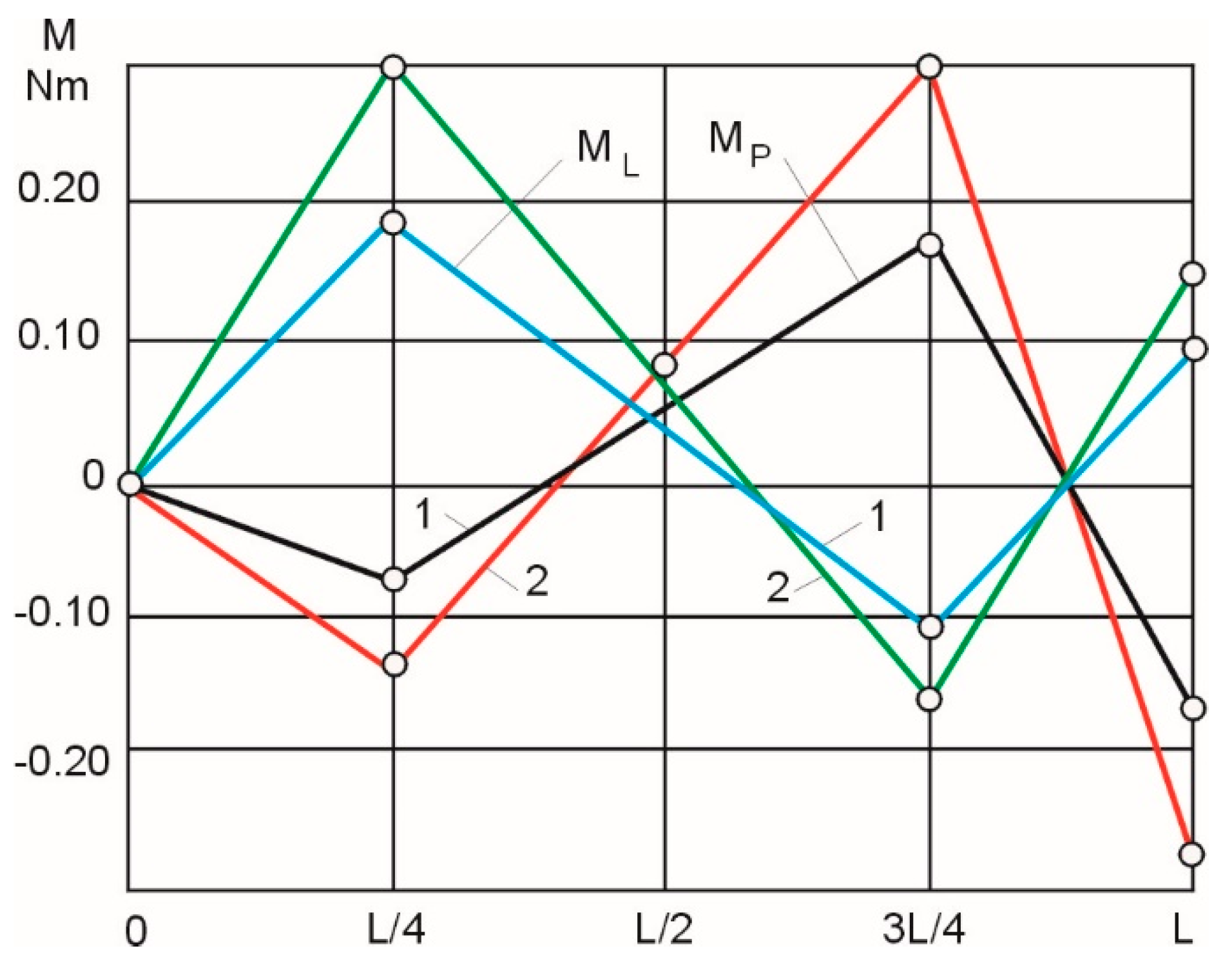
- the value of bending moments applied to the ends of the workpiece changed with the position of the grinding wheel along the machining length.
3.2. Abrasive Machining of Low-Stiffness Shafts with Adjustment of Center Compliance
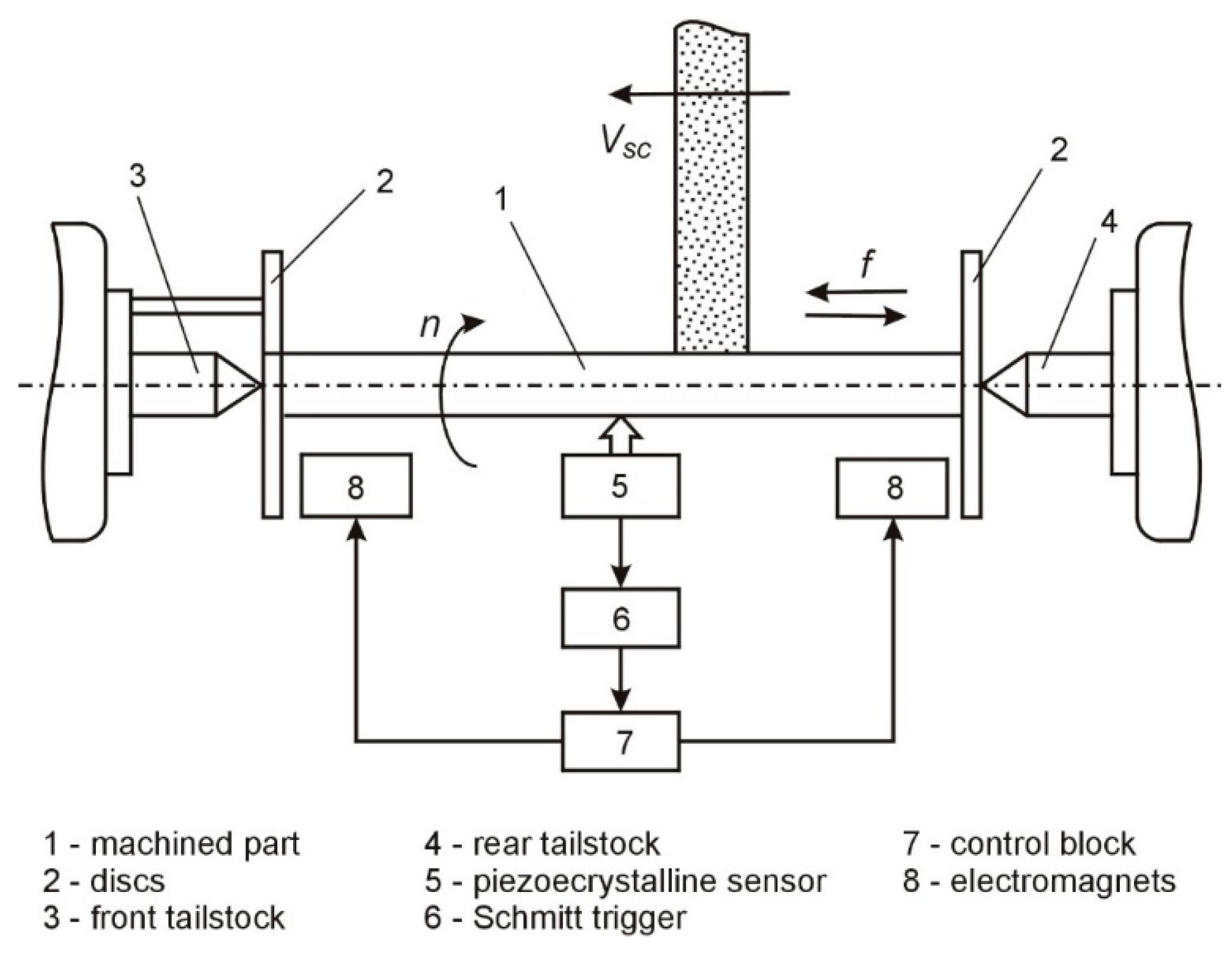
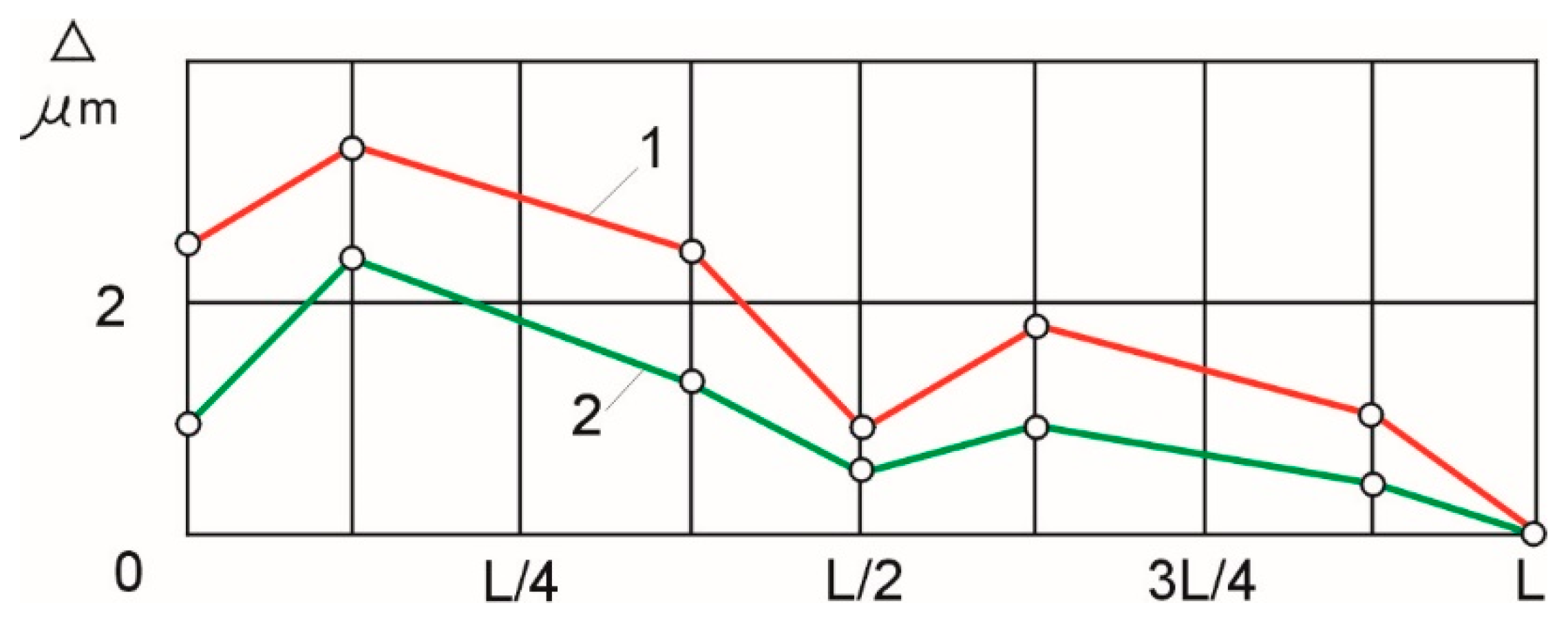
3.3. Abrasive Machining of Low-Stiffness Shafts with Control of Bending Moments
4. Conclusions
- −
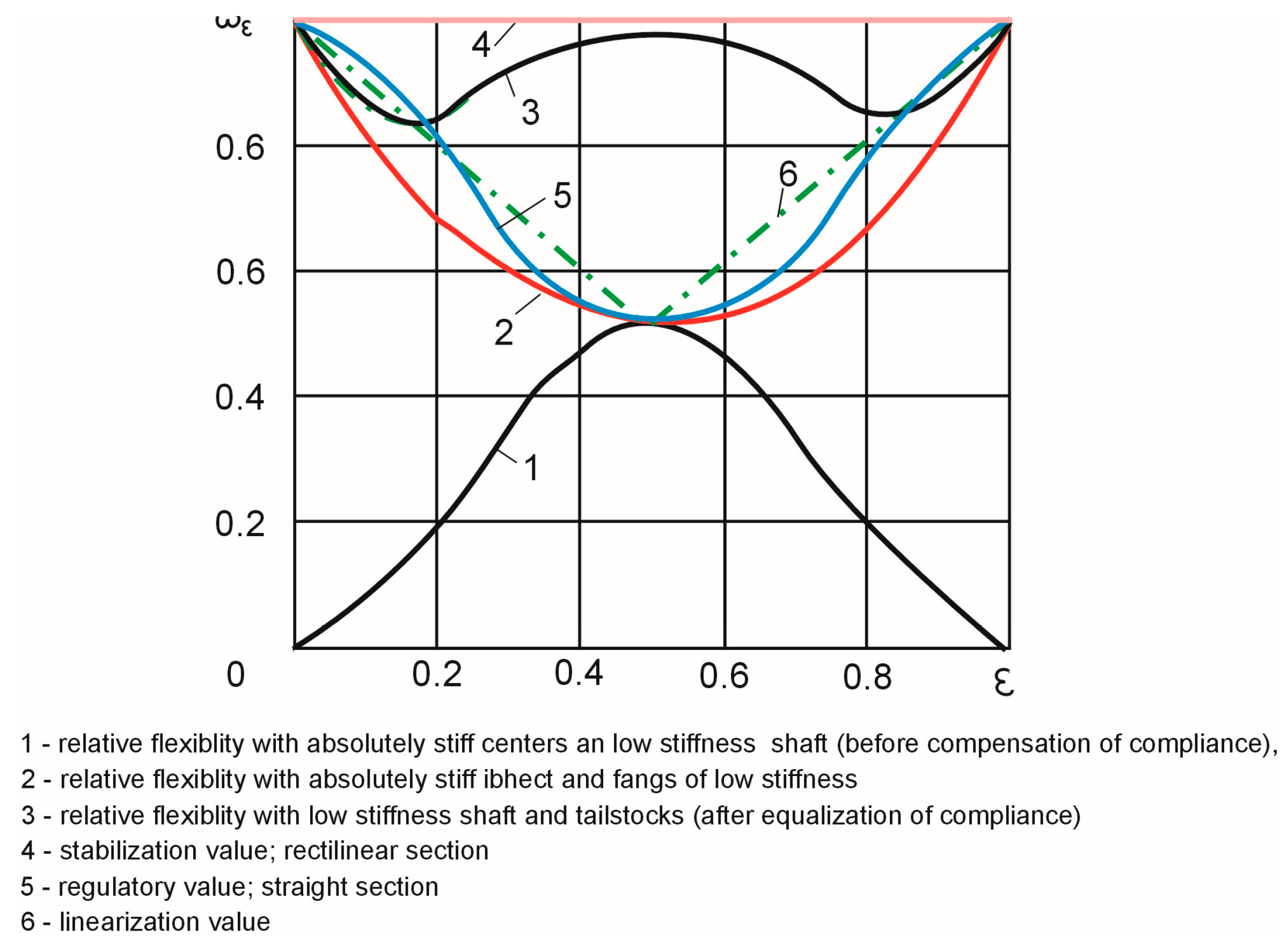
- In grinding operations, shape errors in the longitudinal section of the shaft are mainly caused by the uneven stiffness of the technological system at the point of the application of the cutting force. They can be reduced by equalizing the stiffness of the technological system at the cross-sections of the workpiece (in places where the cutting force is applied).
- −
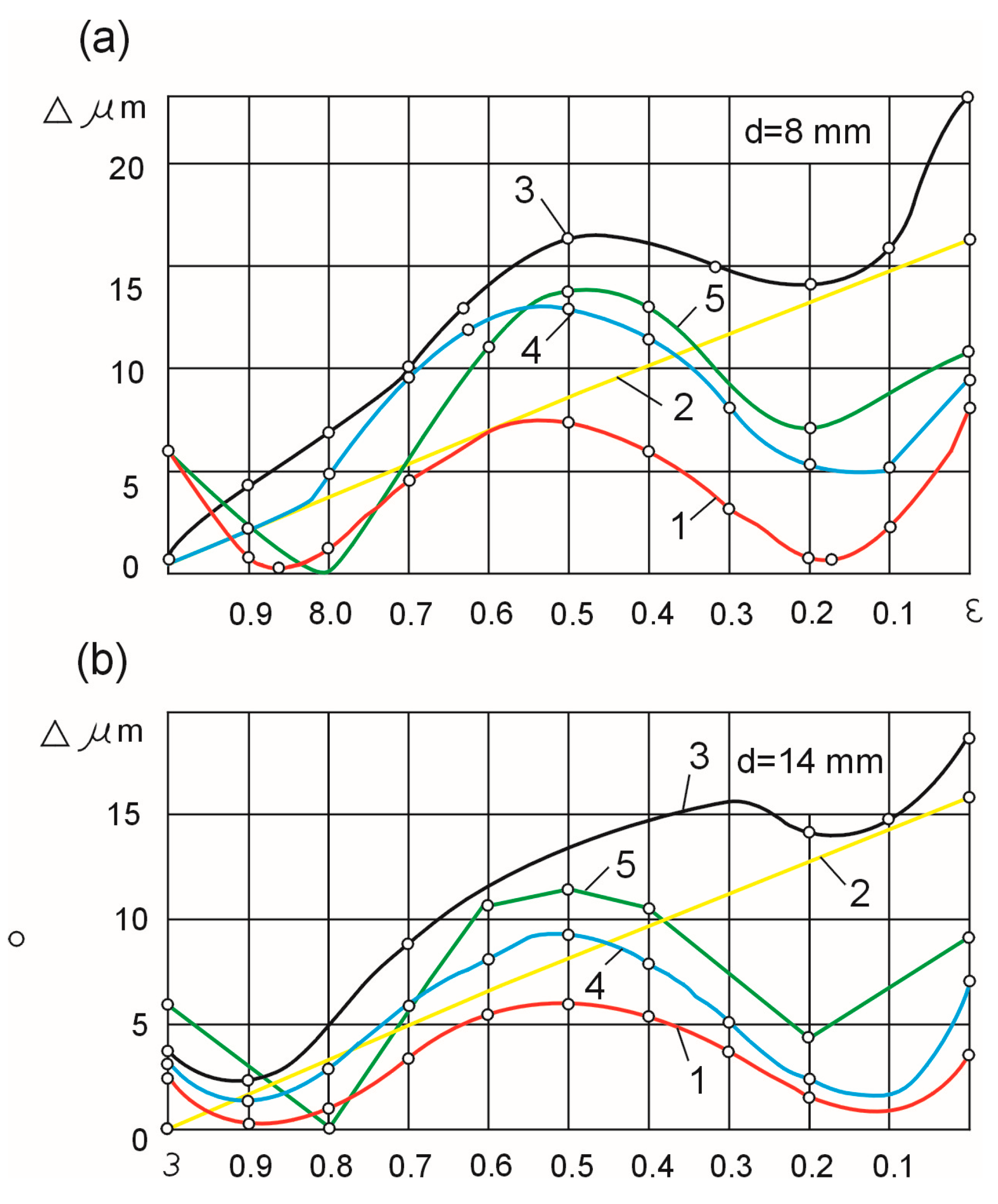
- The accuracy of the shape of a shaft can be increased up to four times by reducing the compliance of the centers (passive method). However, this approach requires the use of sets of centers with different stiffness values and it does not allow for the adjusting of the compliance of the system during machining.
- −
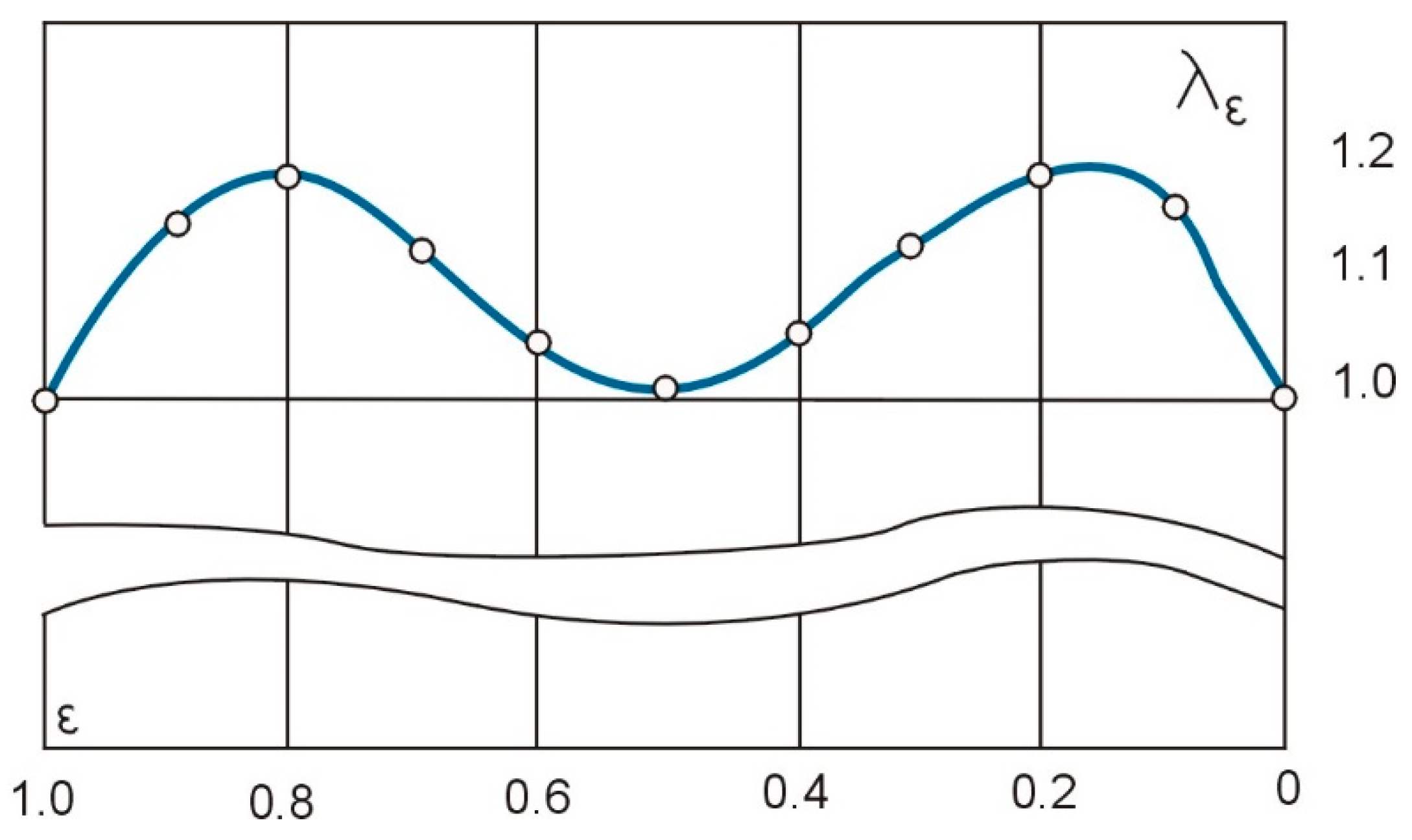
- These limitations of passive compliance compensation have been eliminated in the proposed method of active compensation of the compliance of the elastic technological system during the machining process. In the active approach, the compliance is stabilized by adjusting the stiffness of the centers.
- −
- When the compliance is regulated by a targeted increase in the compliance of the centers, and there are no geometrical inaccuracies of the machine tool introducing a systematic error in the machining results, the compliance of the two centers should be the same. However, when the grinding machine has geometrical inaccuracies, the uniform compensation of the technological system’s compliance does not increase the shape accuracy of the workpiece.
- −
- Control of bending moments allows for the reduction of the shape deviations of the samples by one order of magnitude compared to the uncontrolled process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Morozow, D.; Barlak, M.; Werner, Z.; Pisarek, M.; Konarski, P.; Zagórski, J.; Rucki, M.; Chałko, L.; Łagodziński, M.; Narojczyk, J.; et al. Wear Resistance Improvement of Cemented Tungsten Carbide Deep-Hole Drills after Ion Implanataion. Materials 2021, 14, 239. [Google Scholar] [CrossRef]
- Gurauskis, D.; Przystupa, K.; Kilikevičius, A.; Skowron, M.; Matijošius, J.; Caban, J.; Kilikevičienė, K. Development and Experimental Research of Different Mechanical Designs of an Optical Linear Encoder’s Reading Head. Sensors 2022, 22, 2977. [Google Scholar] [CrossRef]
- Świć, A.; Gola, A.; Wołos, D.; Opielak, M. Micro-geometry Surface Modelling in the Process of Low-rigidity Elastic-Deformable Shafts Turning. IJST-T Mech. Eng. 2016, 41, 159–167. [Google Scholar] [CrossRef]
- Mehdi, K. Modal Analysis and Experimental Plan of Thin-Walled Workpieces in Turning Cutting Process. In Proceedings of the 2020 11th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 14–17 July 2020; pp. 155–161. [Google Scholar]
- Swic, A.; Wolos, D.; Zubrzycki, J.; Opielak, M.; Gola, A.; Taranenko, V. Accuracy Control in the Machining of Low Rigidity Shafts. Appl. Mech. Mat. 2014, 613, 357. [Google Scholar] [CrossRef]
- Świć, A.; Gola, A. Theoretical and Experimental Identification of Frequency Characteristics and Control Signals of a Dynamic System in the Process of Turning. Materials 2021, 14, 2260. [Google Scholar] [CrossRef]
- Świć, A.; Wołos, D.; Gola, A.; Kłosowski, G. The Use of Neural Networks and Genetic Algorithms to Control Low Rigidity Shafts Machining. Sensors 2020, 20, 4683. [Google Scholar] [CrossRef]
- Dobrzynski, M.; Mietka, K. Surface Texture after Turning for Various Workpiece Rigidities. Machines 2021, 9, 9. [Google Scholar] [CrossRef]
- Swic, A.; Draczew, A.; Gola, A. Method of Achieving Accuracy of Thermo-Mechanical Treatment of Low-rigidity Shafts. Adv. Sci. Technol.—Res. J. 2016, 10, 62–70. [Google Scholar] [CrossRef]
- Świć, A.; Gola, A.; Orynycz, O.; Tucki, K.; Matijošius, J. Technological Methods for Controlling the Elastic-Deformable State in Turning and Grinding Shafts of Low Stiffness. Materials 2022, 15, 5265. [Google Scholar] [CrossRef] [PubMed]
- Krzyzak, A.; Kosicka, E.; Borowiec, M.; Szczepaniak, R. Selected Tribological Properties and Vibrations in the Base Resonance Zone of the Polymer Composite Used in the Aviations Industry. Materials 2020, 13, 1364. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.H.; Guo, J.Y.; Yu, C. Analysis to the Influences of Cutting Force to Machining Deformation of a Titanium Alloy Thin-wall Tube. Adv. Mater. Res. 2012, 366, 510–513. [Google Scholar] [CrossRef]
- Zubrzycki, J.; Swic, A.; Taranenko, V. Mathematical Model of the Hole Drilling Process and Typical Automated Process for Designing Hole Drilling Operations. App. Mech. Mater. 2012, 282, 221. [Google Scholar] [CrossRef]
- Liu, J.L.; Ma, C.; Wang, S.L.; Wang, S.B.; Yang, B. Contact Stiffness a Spindle-Tool Holder Based on Fractal Theory and Multi-Scale Contact Mechanics. Mech. Syst. Signal. Pr. 2019, 119, 363–379. [Google Scholar] [CrossRef]
- Tyskevich, V.N.; Sarazov, A.V.; Orlov, S.V. Simulation of maximum elastic deformations during flat grinding of low-rigidity prismatic workpieces. IOP Conf. Ser. -Mater. Sci. Eng. 2020, 971, 022048. [Google Scholar] [CrossRef]
- Tyskevich, V.N.; Sarazov, A.V.; Nosenko, V.A. Optimization of conditions for small grid prismatic workpieces flat grinding by elastic deformations. IOP Conf. Ser. -Mater. Sci. And. Eng. 2020, 709, 8. [Google Scholar]
- Czajka, B.; Rozylo, P.; Debski, H. Stability and Failure of Thin-Walled Composite Structures with a Square Cross-Section. Appl. Comput. Sci. 2022, 18, 43–55. [Google Scholar] [CrossRef]
- Shao, Y.Z.; Cheng, K. Integrated Modelling and Analysis of Micro-cutting Mechanics with the Precision Surface Generation in Abrasive Flow Machining. Int. J. Adv. Manuf. Tech. 2019, 105, 4571–4583. [Google Scholar] [CrossRef]
- Struzikiewicz, G.; Zebala, W. Strain Simulation in Face Turning of Ti6Al4V Thin-Walled Parts. In Proceedings of the Photonics Applications in Astronomy, Communications, Industry, and High Energy Physics Experiments 2017, Wilga, Poland, 28 May–6 June 2017; Volume 10445. [Google Scholar]
- Fei, J.X.; Lin, B.; Huang, T.; Xiao, J.L. Thin Floor Milling Using Moving Support. Int. J. Adv. Manuf. Tech. 2022, 120, 1385–1397. [Google Scholar] [CrossRef]
- Sada, S.O. Improving the Predictive Accuracy of Artificial Neural Network (ANN) Approach in a Mild Steel Turning Operation. Int. J. Adv. Manuf. Tech. 2021, 112, 2389–2398. [Google Scholar] [CrossRef]
- Salgado, M.A.; López de Lacalle, L.N.; Lamikiz, A.; Munoa, J.; Sánchez, J.A. Evaluation of the Stiffness Chain on the Deflection of End-Mills under Cutting Forces. Int. J. Mach. Tool. Manu. 2005, 45, 727–739. [Google Scholar] [CrossRef]
- Stoma, P.; Stoma, M.; Dudziak, A.; Caban, J. Bootstrap Analysis of the Production Processes Capability Assessment. Appl. Sci. 2019, 9, 5360. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Huang, Y.; Wang, Y. Research on Compound PID Control Strategy Based on Input Feedforward and Dynamic Compensation Applied in Noncircular Turning. Micromachines 2022, 13, 341. [Google Scholar] [CrossRef]
- Shabiliy, N.; Lupenko, S.; Yasniy, O.; Malyshevska, O. Keystroke Dynamics Analysis using Machine Learning Methods. Appl. Comput. Sci. 2021, 17, 75–83. [Google Scholar] [CrossRef]
- Dumanli, A.; Sencer, B. Active Control of High Frequency Chatter with Machine Tool Feed Drives in Turning. CIRP Ann.-Manuf. Tech. 2021, 70, 309–312. [Google Scholar] [CrossRef]
- Gorbayuk, S.; Kondratenko, V.; Sedykh, L. Investigation of Deep Hole Drill Stability when Using a Steady Rest. Mater. Today—Proc. 2019, 11, 258–264. [Google Scholar] [CrossRef]
- Sahraoui, Z.; Mehdi, K.; Ben Jaber, M. Experimental Study of the Dynamic Behavior of Thin-Walled Tubular Workpieces In Turning Cutting Process. J. Adv. Manuf. Syst. 2021, 20, 75–93. [Google Scholar] [CrossRef]
- Olvera, D.; López de Lacalle, L.N.; Compeán, F.I.; Fz-Valdivielso, A.; Lamikiz, A.; Campa, F.J. Analysis of the Tool Tip Radial Stiffness of Turn-Milling Centers. Int. J. Adv. Manuf. Tech. 2012, 60, 883–891. [Google Scholar] [CrossRef]
- González, H.; Calleja, A.; Pereira, O.; Ortega, N.; López de Lacalle, L.N.; Barton, M. Super Abrasive Machining of Integral Rotary Components Using Grinding Flank Tools. Metals 2018, 8, 24. [Google Scholar] [CrossRef]
- Peng, Z.L.; Zhang, D.Y.; Zhang, X.Y. Chatter Stability and Precision During High-Speed Ultrasonic Vibration Cutting of a Thin-Walled Titanium Cylinder. Chinese J. Aeronaut. 2020, 33, 3535–3549. [Google Scholar] [CrossRef]
- Kishore, K.; Sinha, M.K.; Singh, A.; Archana; Gupta, M.K.; Korkmaz, M.E. A Comprehensive Review of the Grinding Process: Advancements, Applications and Challenges. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 10923–10952. [Google Scholar] [CrossRef]
- Panahi, H.; Lone, S.A. Estimation Procedures for Partially Accelerated Life Test Model Based on Unified Hybrid Censored Sample from the Gompertz Distribution. Eksploat Niezawodn. 2022, 24, 427–436. [Google Scholar] [CrossRef]
- Vasanth, X.A.; Paul, P.S.; Lawrence, G.; Varadarajan, A.S. Vibration Control Techniques During Turning Process: A Review. Aust. J. Mech. Eng. 2021, 19, 221–241. [Google Scholar] [CrossRef]
- Shashok, A.V.; Kutyshkin, A.V. Control of Accuracy of Turning Treatment of Parts of Machines Based on Fuzzy Logic Algorithms. J. Phys. Conf. Ser. 2019, 1333, 042029. [Google Scholar] [CrossRef]
- Fujii, H.; Onishi, T.; Lin, C.H.; Sakakura, M.; Ohashi, K. Improvement of Form Accuracy in Cylindrical Traverse Grinding with Steady Rest by Controlling Traverse Speed. J. Adv. Mech. Des. Syst. 2021, 15, 20–00505. [Google Scholar] [CrossRef]
- Kuntoğlu, M.; Aslan, A.; Pimenov, D.Y.; Usca, Ü.A.; Salur, E.; Gupta, M.K.; Mikolajczyk, T.; Giasin, K.; Kapłonek, W.; Sharma, S. A Review of Indirect Tool Condition Monitoring Systems and Decision-Making Methods in Turning: Critical Analysis and Trends. Sensors 2021, 21, 108. [Google Scholar] [CrossRef] [PubMed]
- Taranenko, W.; Świć, A. Technologia Kształtowania Części Maszyn o Małej Sztywności; Wyd. Politechniki Lubelskiej: Lublin, Poland, 2005. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Ordinal Number of the Equation | Relative-Compliance Values at Experimental Points | Compliance Values at Experimental Points | Non-Uniformity of Compliance | ||
|---|---|---|---|---|---|
| Ɛmax | Ɛmin | ωmax | ωmin | Δω | |
| (9) | 0.5 | 1.0 | 0.5 | 0 | 0.5 |
| (10) | 1.0 | 0.5 | 1.0 | 0.5 | 0.5 |
| (11) | 0 0.5 1.0 | 0.15 0.85 | 1.0 | 0.875 | 0.125 |
| Reference Coordinate | Compliance | Regulation Factor λƐ | Absolute Deviation Δω6 | Relative Deviation δ(Ɛ)% | Non-Uniformity of Compliance Δω7 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ω1(Ɛ) | ω2(Ɛ) | ω3(Ɛ) | ω4(Ɛ) | ω5(Ɛ) | ω6(Ɛ) | ω7(Ɛ) | |||||
| 0 | 0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 0 | 0 | 0 |
| 0.1 | 0.065 | 0.82 | 0.885 | 1.0 | 0.935 | 0.9 | 0.965 | 1.14 | 0.035 | 3.7 | 0.035 |
| 0.15 | 0.132 | 0.74 | 0.875 | 1.0 | 0.868 | 0.85 | 0.982 | 1.173 | 0.018 | 2.1 | 0.018 |
| 0.2 | 0.205 | 0.68 | 0.885 | 1.0 | 0.795 | 7 | 1.005 | 1.169 | 0.005 | 0.6 | 0.005 |
| 0.3 | 0353 | 0.58 | 0.933 | 1.0 | 0.647 | 0.5 | 1.053 | 1.115 | 0.053 | 7.5 | 0.053 |
| 0.4 | 0.461 | 0.52 | 0.981 | 1.0 | 0.539 | 0.6 | 1.061 | 1.036 | 0.061 | 10.1 | 0.061 |
| 0.5 | 0.5 | 0.5 | 1.0 | 1.0 | 0.5 | 0.5 | 1.0 | 1.0 | 0 | 0 | 0 |
| 0.6 | 0.641 | 0.52 | 0.981 | 1.0 | 0.539 | 0.6 | 1.061 | 1.036 | 0.061 | 10.1 | 0.061 |
| 0.7 | 0.353 | 0.58 | 0.933 | 1.0 | 0.647 | 0.7 | 1.053 | 1.115 | 0.053 | 7.5 | 0.053 |
| 0.8 | 0.205 | 0.68 | 0.885 | 1.0 | 0.795 | 0.8 | 0.005 | 0.169 | 0.005 | 0.6 | 0.005 |
| 0.85 | 0.132 | 0.74 | 0.875 | 1.0 | 0.868 | 0.85 | 0.982 | 1.173 | 0.018 | 2.1 | 0.018 |
| 0.9 | 0.065 | 0.85 | 0.885 | 1.0 | 0.935 | 0.9 | 0.965 | 1.14 | 0.035 | 3.7 | 0.035 |
| 1.0 | 0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 00 | 0 | 0 |
| No. | Control Methods | Cylindrical Deviation [µm] for Shaft Diameters | |
|---|---|---|---|
| 8 [mm] | 14 [mm] | ||
| 1. | No control | 32.0 | 22.0 |
| 2. | Uniform compliance compensation | 23.0 | 19.0 |
| 3. | Non-uniform compliance compensation | 14.5 | 11.5 |
| 4. | Linearizing adjustment of compliance | 7.0 | 4.5 |
| 5. | Programmed compliance adjustment | 3.5 | 2.5 |
| 6. | Control of bending moments (linearization) | 3.3 | 2.1 |
| Relative Coordinate ε | Ordinates of Curves Xi | Deviations of Ordinates ΔXi | Dispersion of Deviations Si2 | |||
|---|---|---|---|---|---|---|
| (4) Theoretical X1 | (5) Experimental X2 | |||||
| 0 | 9.0 | 11.5 | 1.6 | 3.2 | 2.56 | 10.24 |
| 0.1 | 3.6 | 9.1 | 3.8 | 0.8 | 14.44 | 0.64 |
| 0.2 | 4.7 | 7.0 | 2.7 | 1.3 | 7.29 | 1.69 |
| 0.3 | 8.4 | 10.5 | 1.0 | 2.2 | 1.0 | 4.84 |
| 0.4 | 11.6 | 14.0 | 4.2 | 5.7 | 17.64 | 32.49 |
| 0.5 | 13.2 | 14.5 | 5.8 | 6.2 | 33.64 | 38.44 |
| 0.6 | 12.0 | 10.5 | 4.6 | 2.2 | 21.16 | 4.84 |
| 0.7 | 8.8 | 5.0 | 1.4 | 3.3 | 1.96 | 10.89 |
| 0.8 | 5.3 | 0 | 2.1 | 8.3 | 4.41 | 68.89 |
| 0.9 | 4.3 | 3.0 | 3.1 | 5.3 | 9.61 | 28.09 |
| 1.0 | 0 | 6.0 | 7.4 | 2.3 | 54.76 | 5.29 |
| 80.9 | 91.1 | - | - | 168.47 | 206.34 | |
| 7.4 | 8.3 | - | - | - | - | |
| Si2 | S12 = 16.58 | S22 = 20.63 | ||||
| Si | S1 = 4.1 | S2 = 4.5 | ||||
| Gi = 0.349 | G1 = 0.32 | G2 = 0.33 | ||||
| tT = 2.2 | t1 = 1.8 | t2 = 1.84 | ||||
| t*T = 2.08 | t*1–2 = 0.47 | |||||
| FT = 3.59 | F1–2 = 1.22 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Świć, A.; Gola, A. Influence of the Compliance of a Technological System on the Machining Accuracy of Low-Stiffness Shafts in the Grinding Process. Materials 2023, 16, 1498. https://doi.org/10.3390/ma16041498
Świć A, Gola A. Influence of the Compliance of a Technological System on the Machining Accuracy of Low-Stiffness Shafts in the Grinding Process. Materials. 2023; 16(4):1498. https://doi.org/10.3390/ma16041498
Chicago/Turabian StyleŚwić, Antoni, and Arkadiusz Gola. 2023. "Influence of the Compliance of a Technological System on the Machining Accuracy of Low-Stiffness Shafts in the Grinding Process" Materials 16, no. 4: 1498. https://doi.org/10.3390/ma16041498