
Crack Evaluation of Concrete Using Mechanochromic Sensor

 and
and
Abstract
:1. Introduction
1.1. Background and Purpose of Research
1.2. Research Significance
2. Literature Review
3. Experimental Design
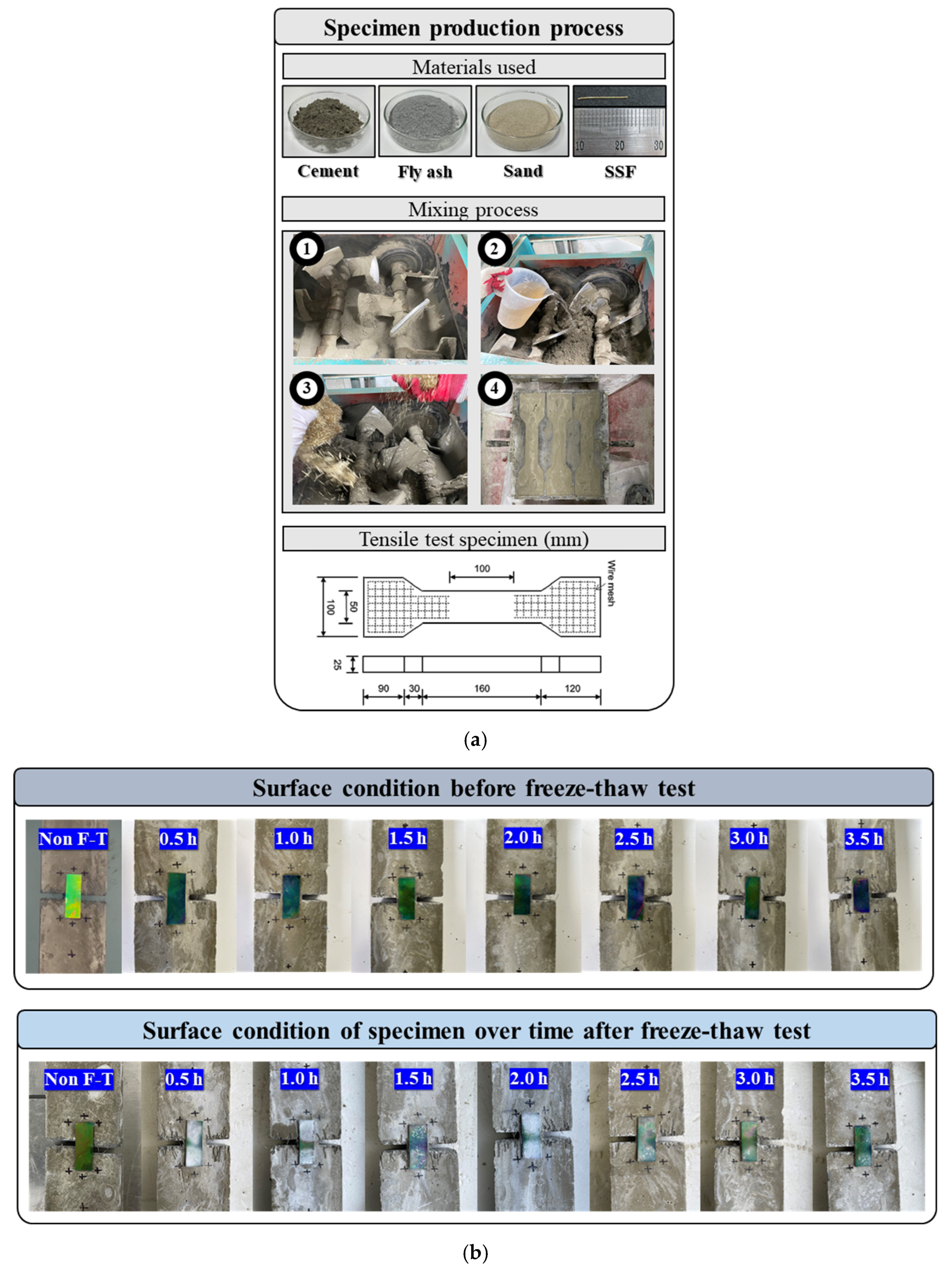
3.1. Specimen Preparation
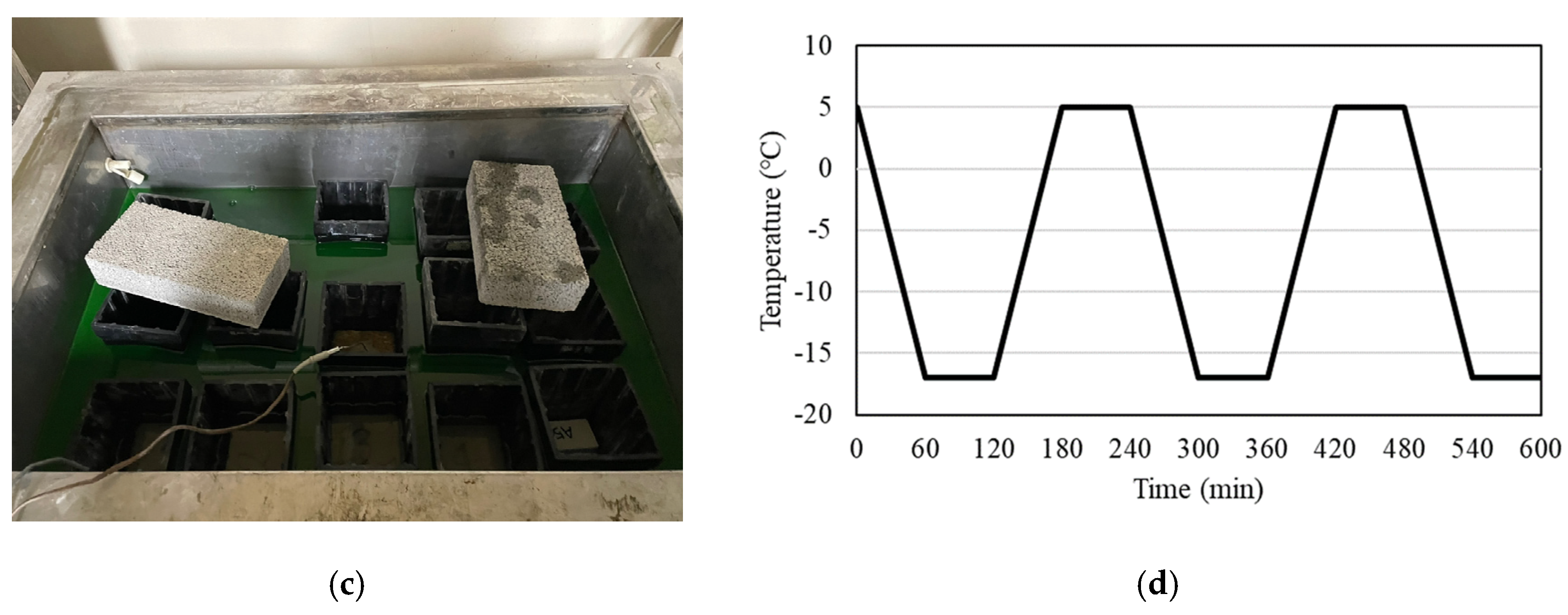
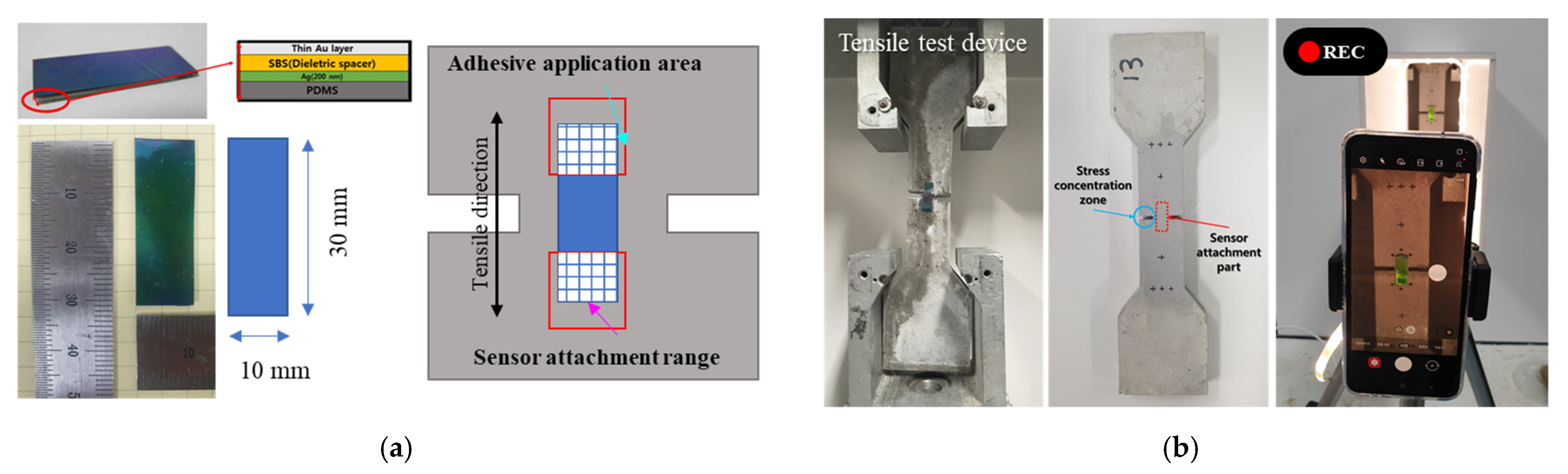
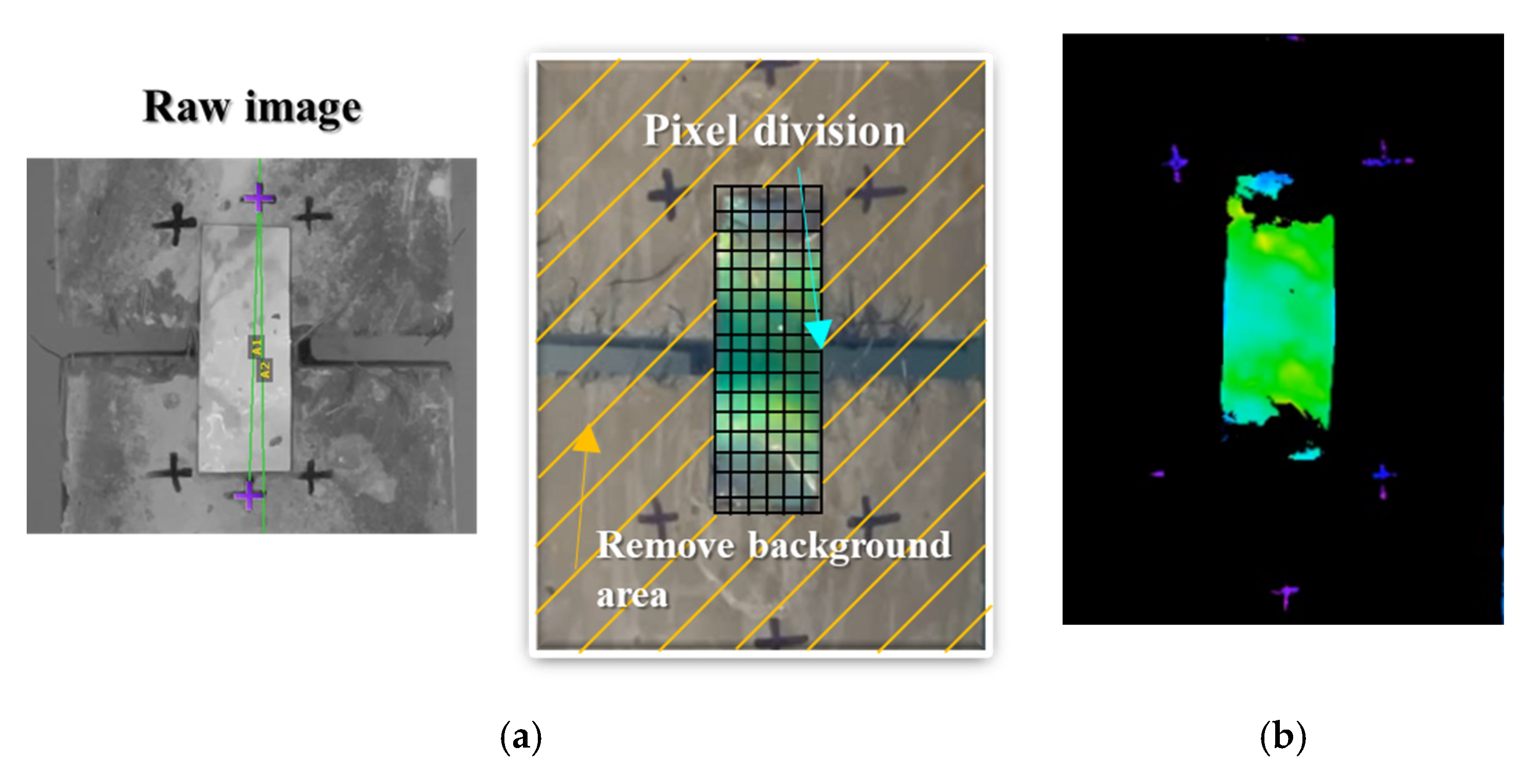
3.2. Experimental Method
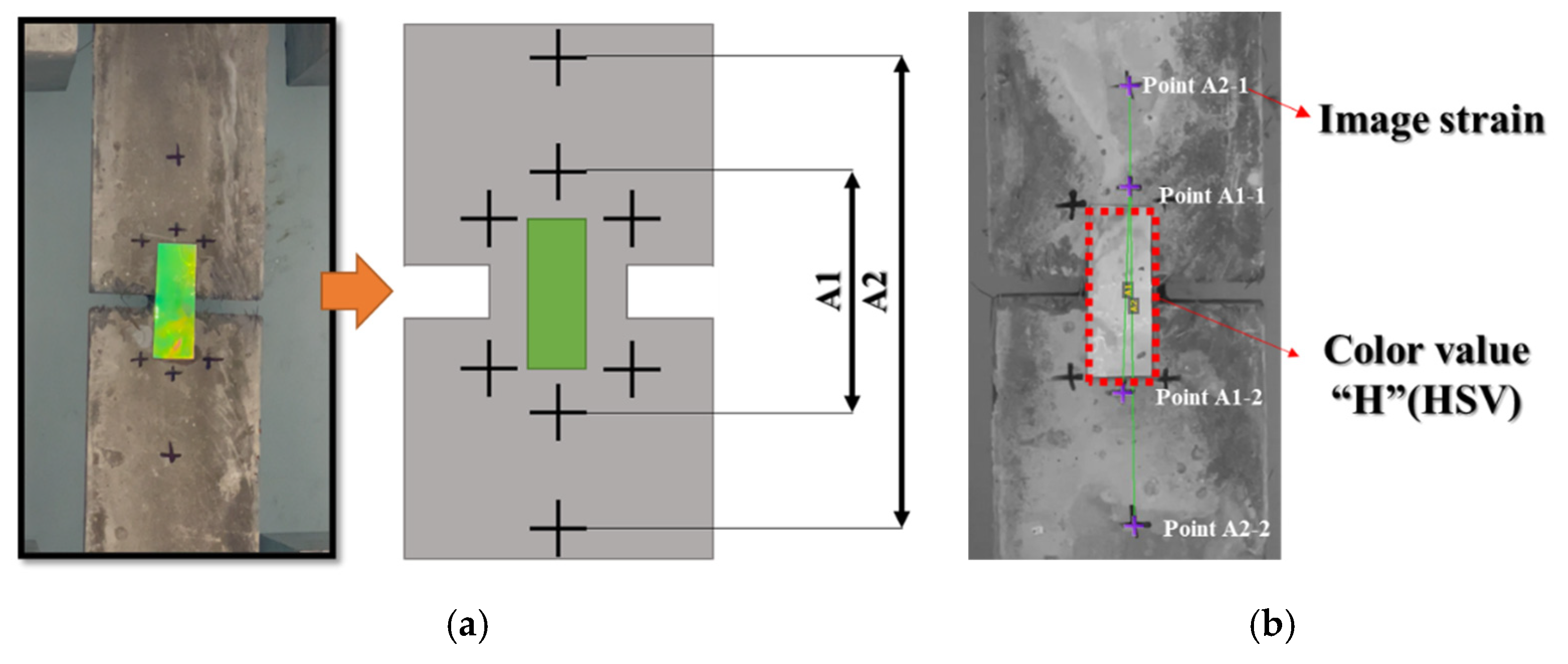
3.3. Suggestion of Discoloration Index Setting of Mechanochromic Sensor and Crack Width Derivation Formula for Estimating Deformation of Concrete
4. Results and Analysis
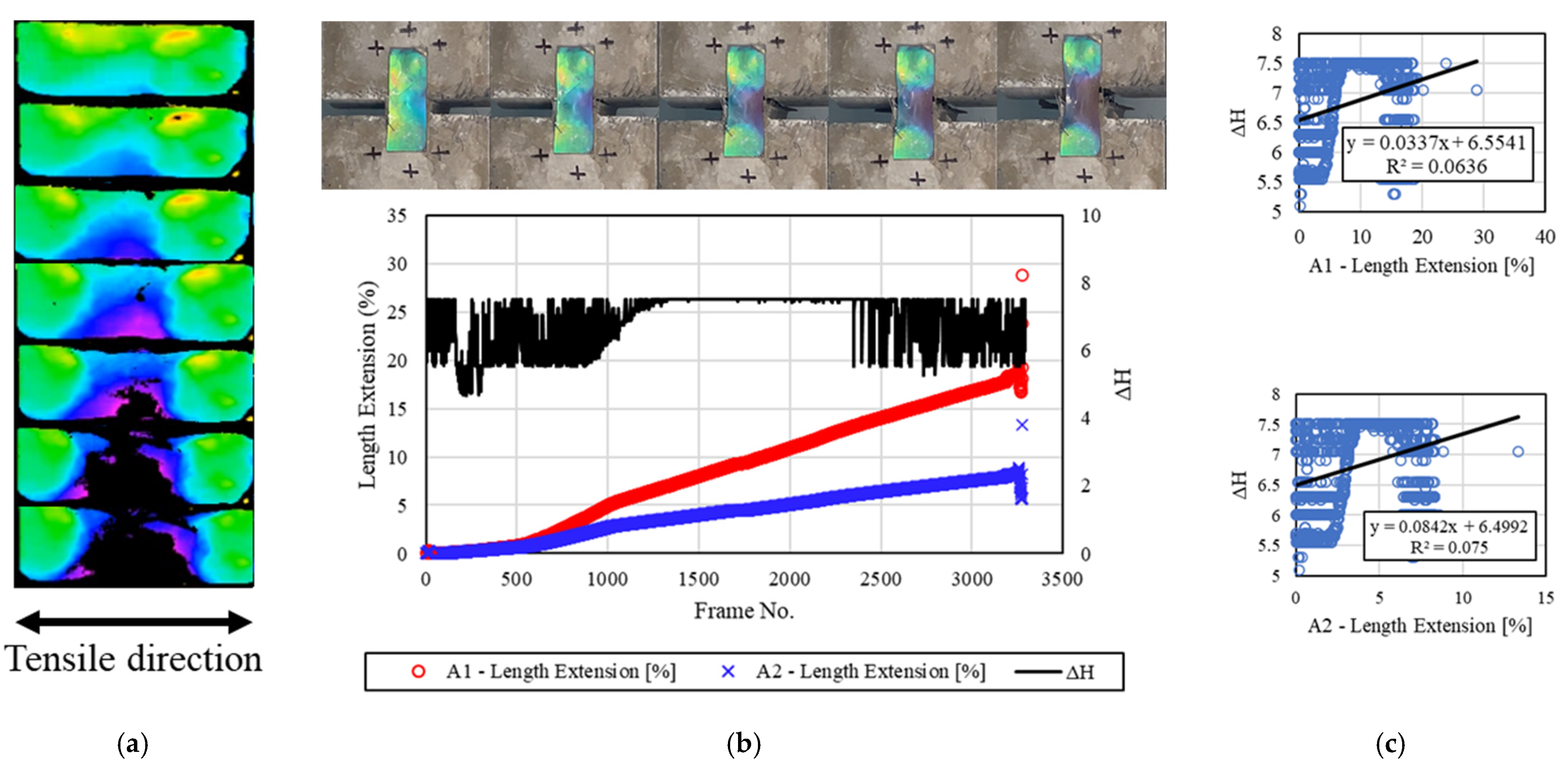
4.1. Results for Deformation and Discoloration Reaction of Mechanochromic Sensor with Concrete Specimen Exposed to Freeze–Thaw Environment
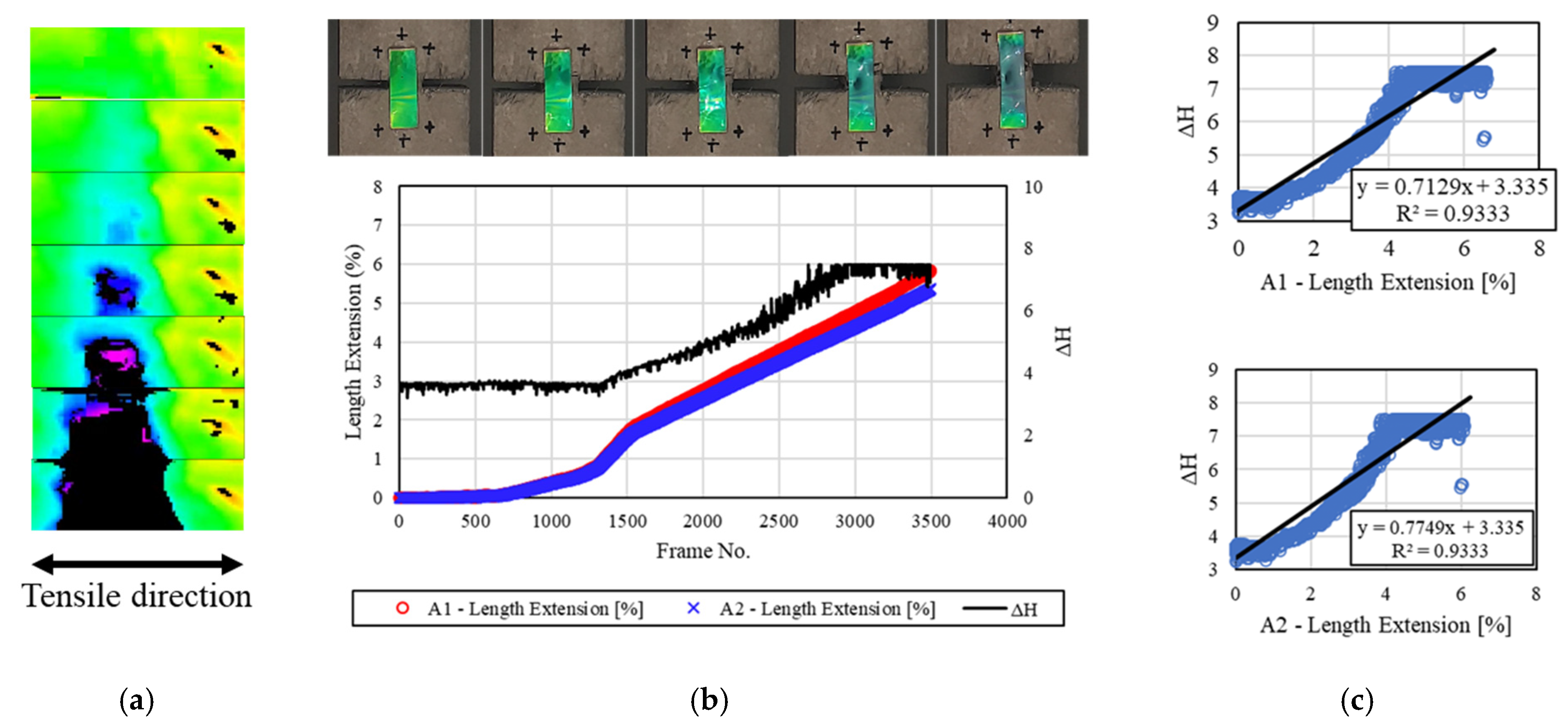
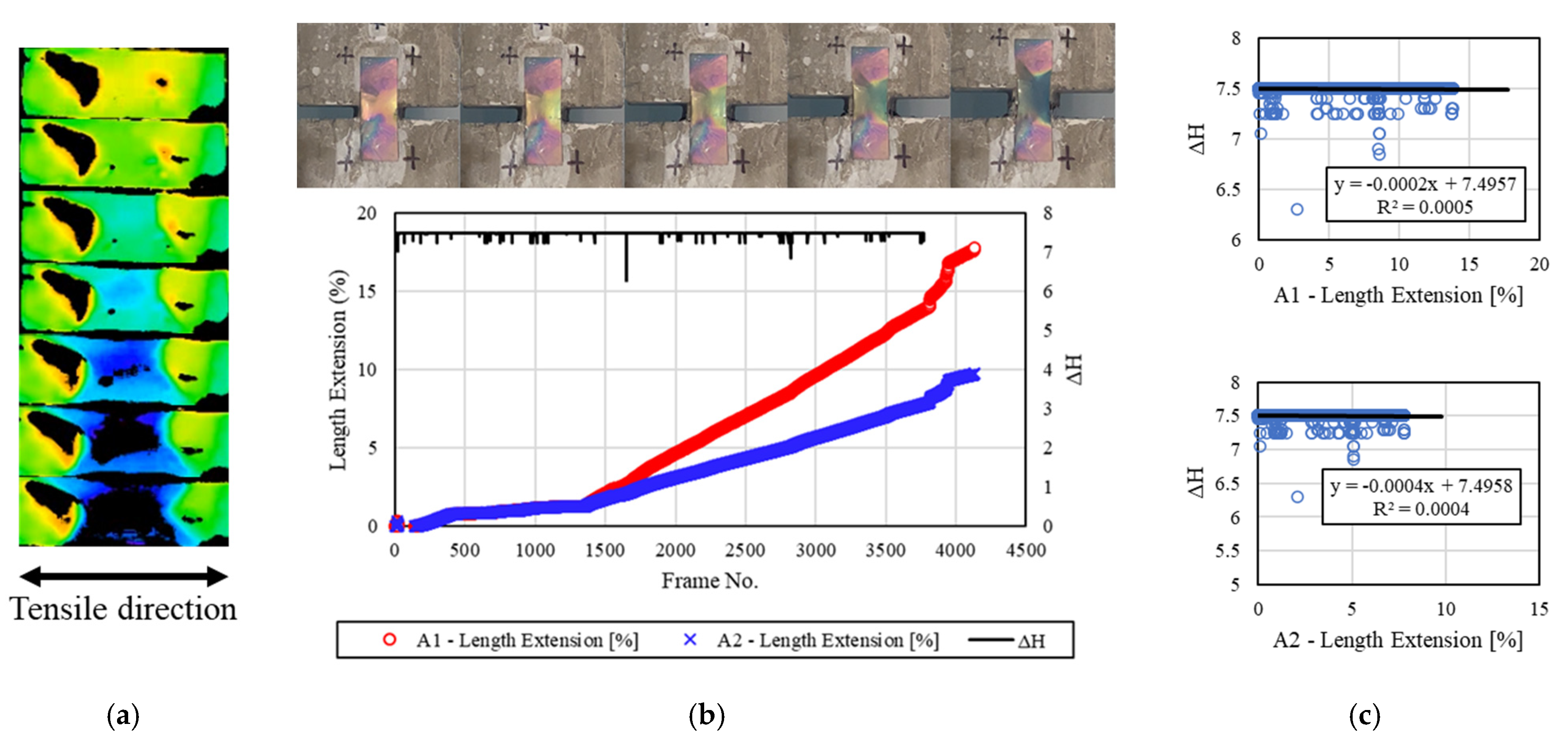
4.1.1. Non-F–T
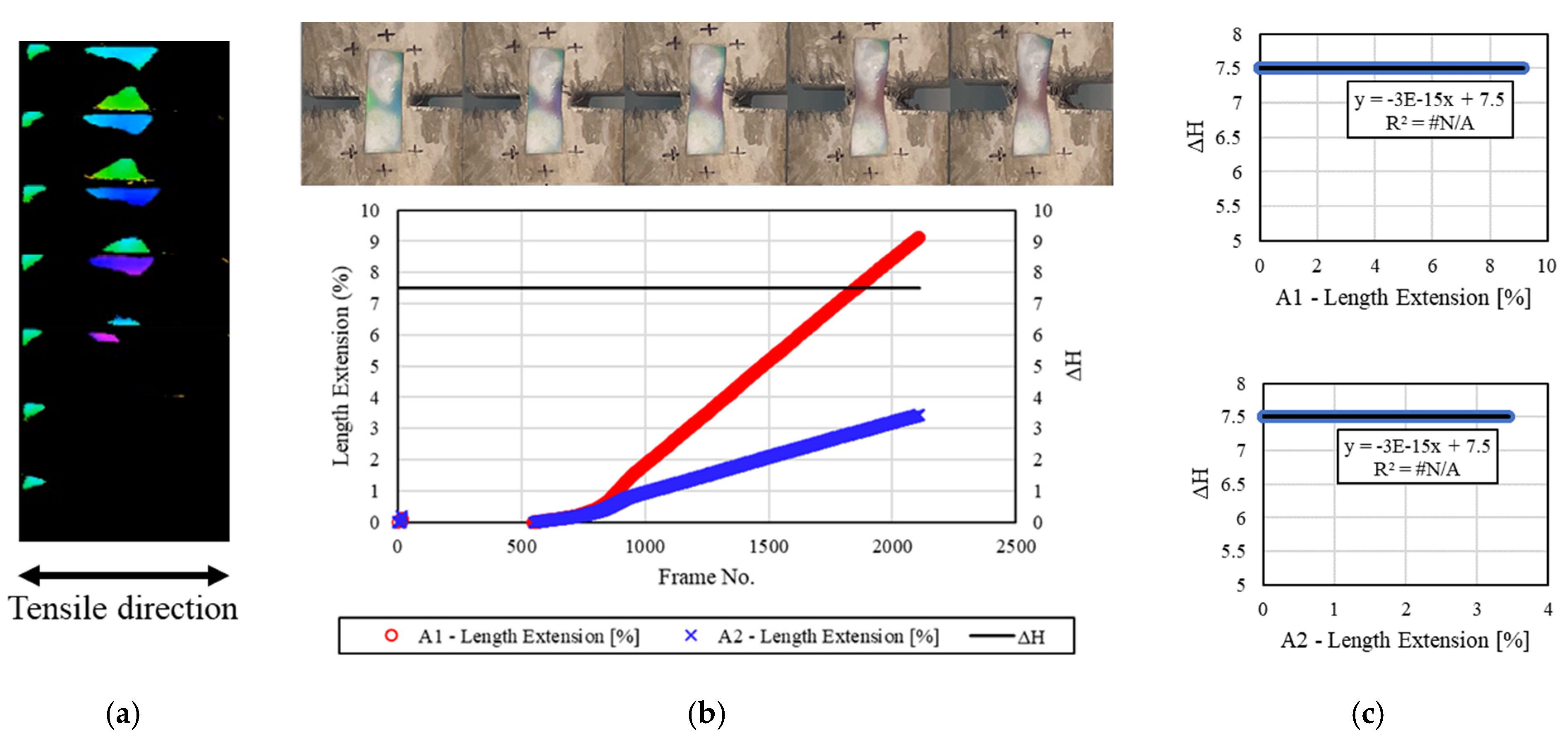
4.1.2. Specimens 0.5 h after End of F–T Test
4.1.3. Specimens 1.0 h after End of F–T
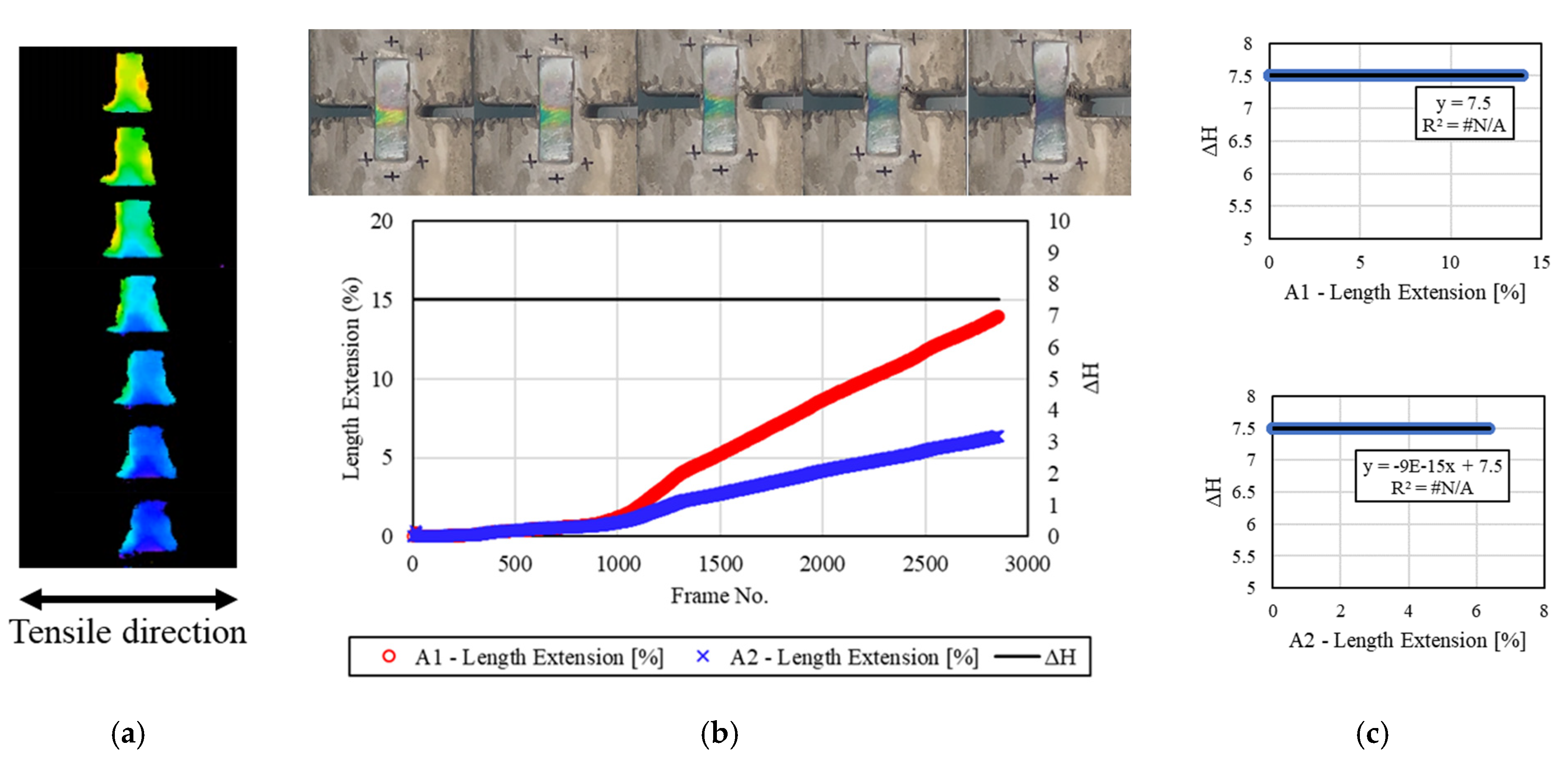
4.1.4. Specimens 1.5 h after End of F–T
4.1.5. Specimens 2.0 h after End of F–T
4.1.6. Specimens 2.5 h after End of F–T
4.1.7. Specimens 3.0 h after End of F–T
4.1.8. Specimens 3.5 h after End of F–T
4.2. Validation of Crack Monitoring Technique Using Mechanochromic Sensor
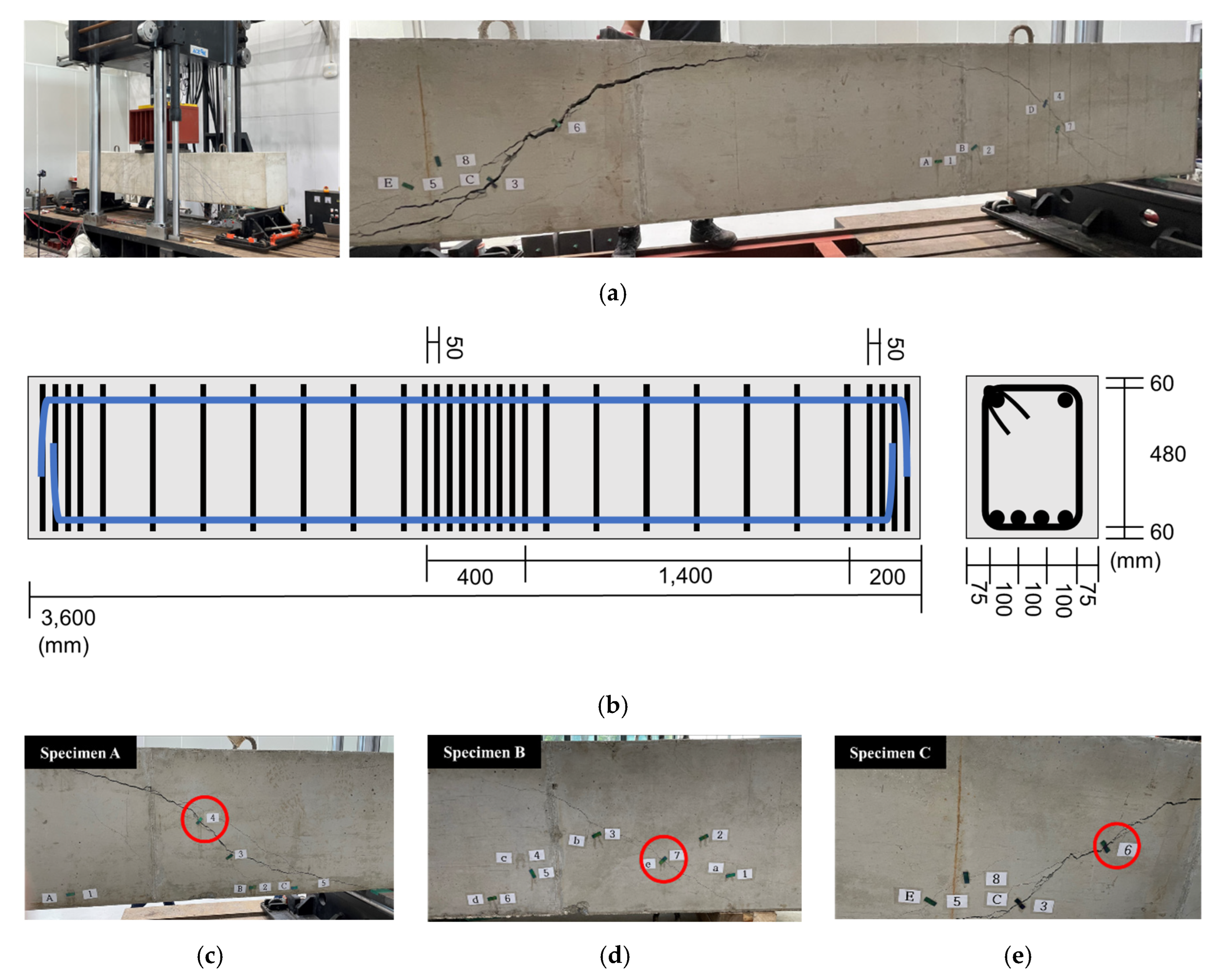
4.2.1. Overview of Concrete Beam Member Crack Measurement Experiment
4.2.2. Measurement Results for Crack Width of Concrete Beam Member Obtained Using Mechanochromic Sensor
5. Conclusions
- The relationship between the discoloration of the mechanochromic sensor and the deformation of the specimen was confirmed, and the discoloration of the sensor could be identified in real time during the progression of cracks.
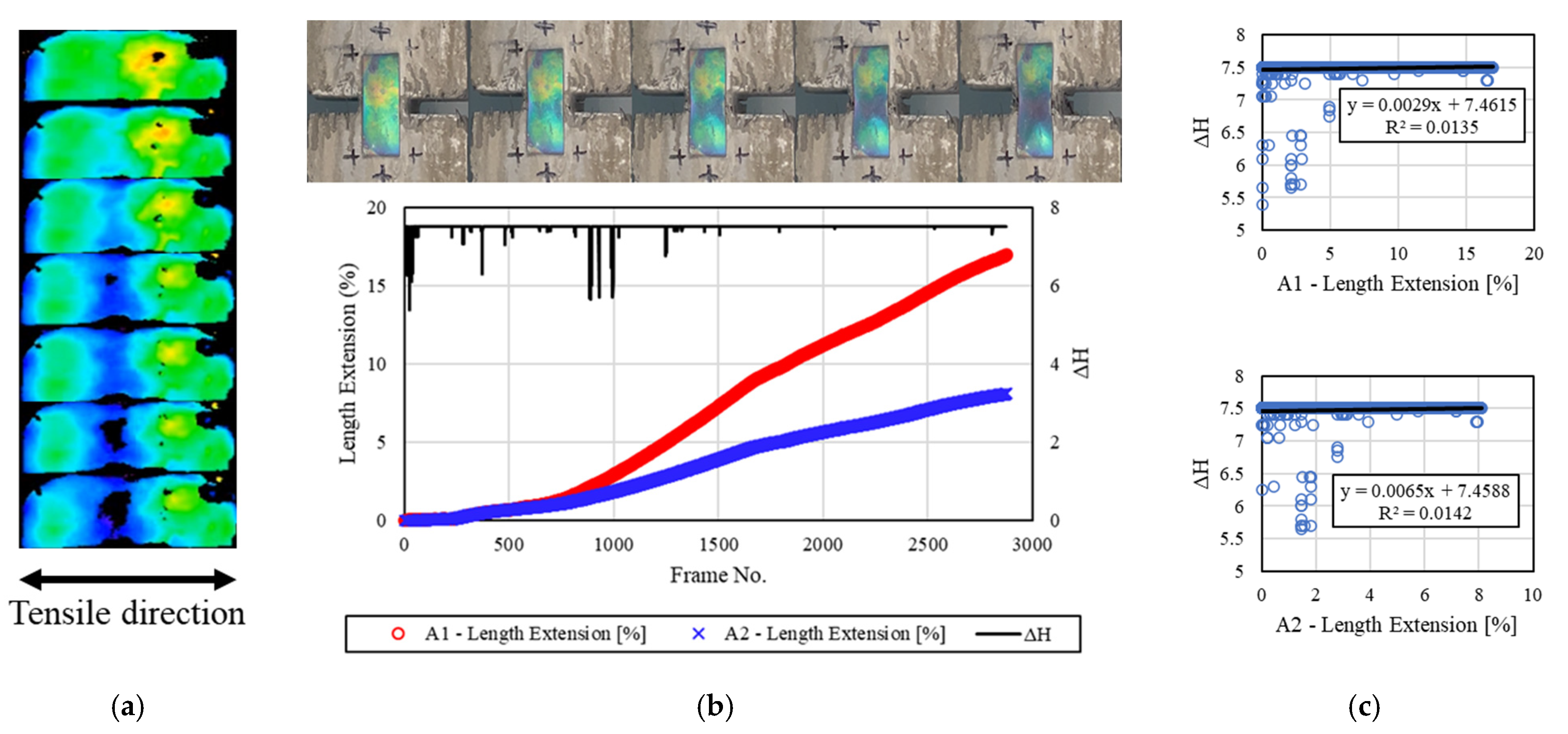
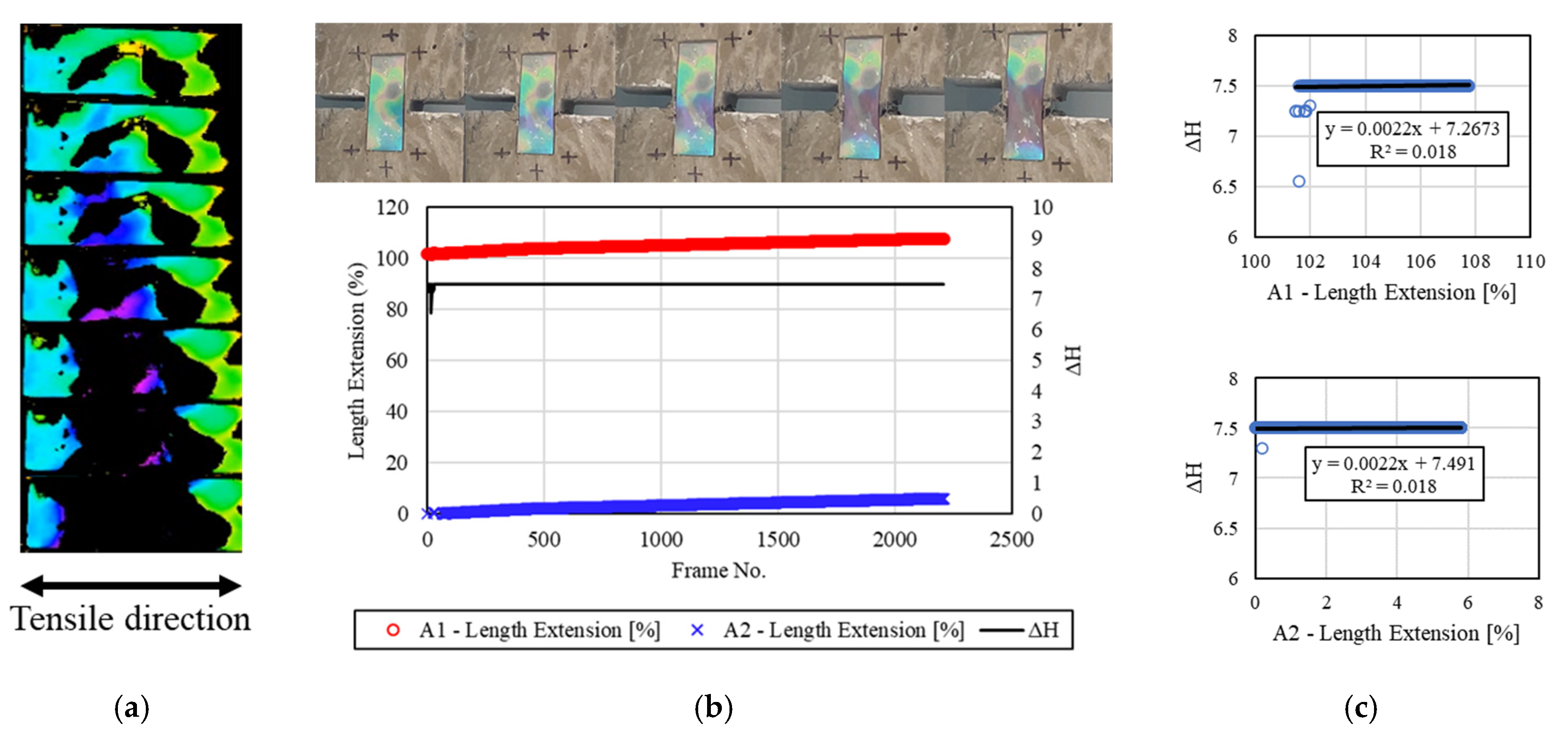
- For the concrete specimen and mechanochromic sensor exposed to a freeze–thaw environment, the discoloration area was recognized in the sensor image 1.5 h after the end of freezing and thawing. R2 was also calculated from 1.5 h after the end of freezing and thawing, and it gradually increased.
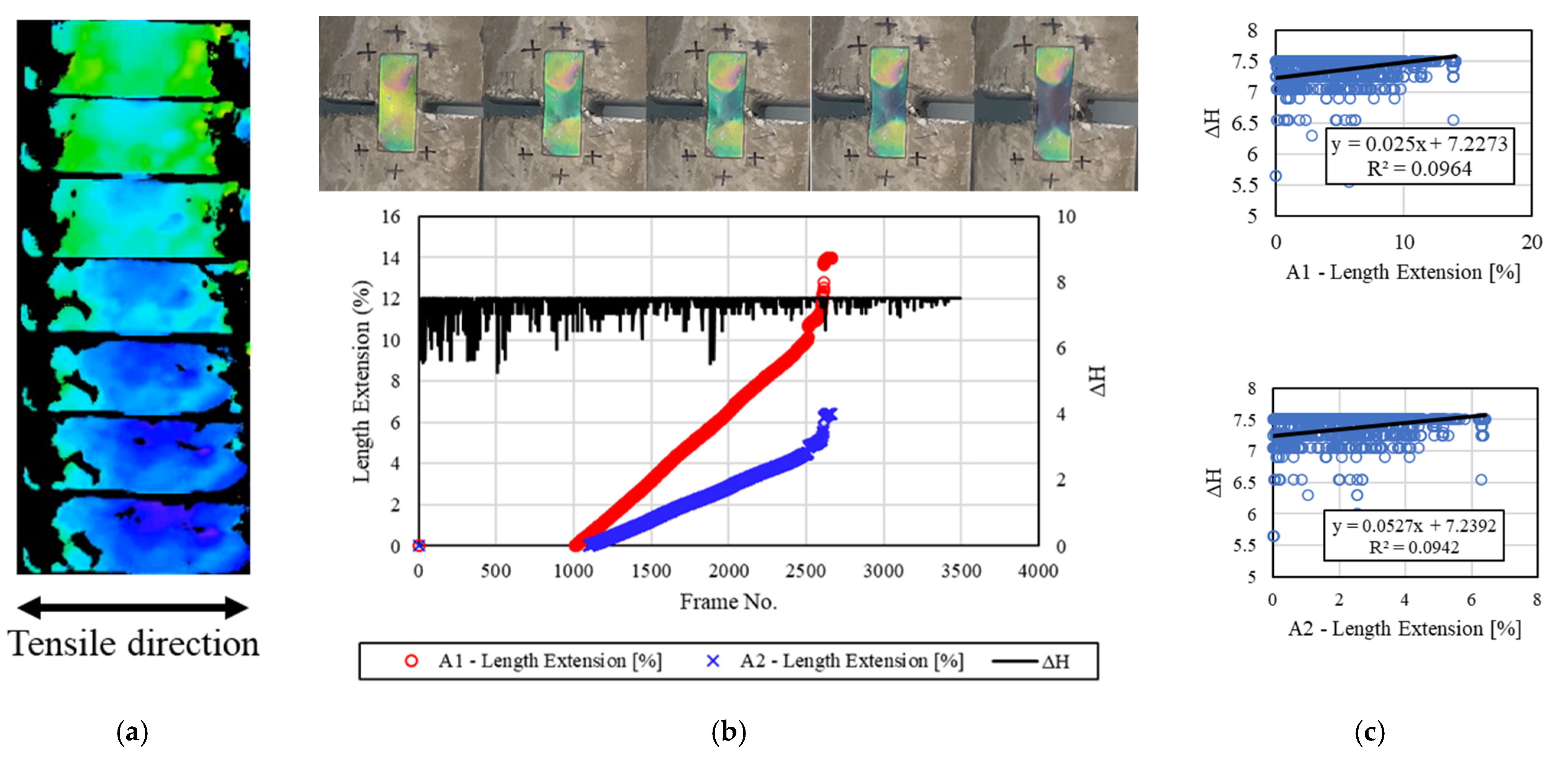
- The mechanochromic sensor exhibited the largest R2 value 3.0 h after the end of freezing and thawing. When the sensor was not damaged in the freeze–thaw environment, the recovery time required for sensor discoloration measurement was estimated to be approximately 3 h. Accordingly, if images of the sensor surface condition are captured in cold areas, it is possible to identify deformation and discoloration most accurately using images after 3.0 h.
- The deformation and discoloration of the mechanochromic sensor with respect to the crack development in concrete beam members was analyzed, and similar tendencies were observed for the actual crack deformation and the sensor discoloration when the crack widths based on the scale and the image analysis were proportional.
- When the deformation of concrete materials was monitored using the mechanochromic sensor, image analysis revealed that the degree of sensor discoloration corresponded to the degree of crack development. For more accurate monitoring, it is necessary to improve the reliability of the model and the experimental environment with consideration of data collected under various conditions, such as the sensor attachment position.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Heo, G.H.; Lee, G.; Yun, H.D.; Choi, M.Y.; Lee, M.W. Structural Health Monitoring Systems for a Steel Structure Using an Ambient Vibration. Key Eng. Mater. 2005, 297-300, 2102–2108. [Google Scholar] [CrossRef]
- Heo, G.H.; Lee, W.S.; Kim, M.G. Structural health monitoring system employing smart sensor technology part 1: Development and performance test of smart sensor. J. Korea Inst. Struct. Maint. Insp. 2007, 11, 134–144. [Google Scholar]
- Rahimian, F.P.; Seyedzadeh, S.; Oliver, S.; Rodriguez, S.; Dawood, N. On-demand monitoring of construction projects through a game-like hybrid application of BIM and machine learning. Autom. Constr. 2020, 110, 103012. [Google Scholar] [CrossRef]
- Uva, G.; Porco, F.; Fiore, A.; Porco, G. Structural monitoring using fiber optic sensors of a pre-stressed concrete viaduct during construction phases. Case Stud. Nondestruct. Test. Evaluation 2014, 2, 27–37. [Google Scholar] [CrossRef] [Green Version]
- Bae, G.; Seo, M.; Lee, S.; Bae, D.; Lee, M. Angle-insensitive Fabry–Perot mechanochromic sensor for real-time structural health monitoring. Adv. Mater. Technol. 2021, 6, 2100118. [Google Scholar] [CrossRef]
- Chen, B.; Liu, W. Mobile Agent Computing Paradigm for Building a Flexible Structural Health Monitoring Sensor Network. Comput. Civ. Infrastruct. Eng. 2010, 25, 504–516. [Google Scholar] [CrossRef]
- Celebi, M. Seismic Instrumentation of Buildings (with Emphasis on Federal Buildings); Report No. 0-7460-68170; USGS: Menlo Park, CA, USA, 2002.
- Ni, Y.-Q.; Wang, B.S.; Ko, J.M. Simulation studies of damage location in Tsing Ma Bridge deck. In Nondestructive Evaluation of Highways, Utilities, and Pipelines IV; SPIE: Bellingham, WA, USA, 2000; Volume 3995, pp. 312–324. [Google Scholar] [CrossRef]
- Hipley, P. Caltrans’ Current State-of-Practice. In Proceedings of the Instrumental Systems for Diagnostics of Seismic Response of Bridges and Dams, Richmond, CA, USA, 4–5 October 2001. [Google Scholar]
- Yıldırım, G.; Sarwary, M.H.; Al-Dahawi, A.; Öztürk, O.; Anıl, Ö.; Şahmaran, M. Piezoresistive behavior of CF- and CNT-based reinforced concrete beams subjected to static flexural loading: Shear failure investigation. Constr. Build. Mater. 2018, 168, 266–279. [Google Scholar] [CrossRef]
- Lee, B.Y.; Yi, S.T.; Kim, J.K. Surface crack evaluation method in concrete structures. J. Korean Soc. Nondestruct. Test. 2007, 27, 173–182. [Google Scholar]
- Brownjohn, J.M.W. Structural health monitoring of civil infrastructure. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 589–622. [Google Scholar] [CrossRef] [Green Version]
- Sofi, A.; Regita, J.J.; Rane, B.; Lau, H.H. Structural health monitoring using wireless smart sensor network–An overview. Mech. Syst. Signal Process. 2021, 163, 108113. [Google Scholar] [CrossRef]
- Kang, L.-H. Vibration and impact monitoring of a composite-wing model using piezoelectric paint. Adv. Compos. Mater. 2014, 23, 73–84. [Google Scholar] [CrossRef]
- Yang, C.; Fritzen, C.-P. Piezoelectric paint: Characterization for further applications. Smart Mater. Struct. 2012, 21, 045017. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.-W.; Chung, D.D.L. Improving the electrical conductivity of composites comprised of short conducting fibers in a nonconducting matrix: The addition of a nonconducting particulate filler. J. Electron. Mater. 1995, 24, 47–51. [Google Scholar] [CrossRef]
- Chen, P.-W.; Chung, D.D.L. Carbon-Fiber-Reinforced Concrete as an Intrinsically Smart Concrete for Damage Assessment during Dynamic Loading. J. Am. Ceram. Soc. 1995, 78, 816–818. [Google Scholar] [CrossRef]
- Fu, X.; Chung, D.D.L. Contact electrical resistivity between cement and carbon fiber: Its decrease with increasing bond strength and its increase during fiber pull-out. Cem. Concr. Res. 1995, 25, 1391–1396. [Google Scholar] [CrossRef]
- Chen, P.-W.; Chung, D.D.L. Concrete as a new strain/stress sensor. Compos. Part B: Eng. 1996, 27, 11–23. [Google Scholar] [CrossRef]
- Shi, Z.-Q.; Chung, D.D.L. Carbon fiber-reinforced concrete for traffic monitoring and weighing in motion. Cem. Concr. Res. 1999, 29, 435–439. [Google Scholar] [CrossRef]
- Chen, P.-W.; Chung, D.D.L. Carbon fiber reinforced concrete for smart structures capable of non-destructive flaw detection. Smart Mater. Struct. 1993, 2, 22. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Ubertini, F.; García-Macías, E.; Castro-Triguero, R.; Downey, A.; Laflamme, S.; Meoni, A.; Materazzi, A.L. Static and Dynamic Strain Monitoring of Reinforced Concrete Components through Embedded Carbon Nanotube Cement-Based Sensors. Shock. Vib. 2017, 2017, 3648403. [Google Scholar] [CrossRef] [Green Version]
- Pisello, A.L.; D’Alessandro, A.; Sambuco, S.; Rallini, M.; Ubertini, F.; Asdrubali, F.; Materazzi, A.L.; Cotana, F. Multipurpose experimental characterization of smart nanocomposite cement-based materials for thermal-energy efficiency and strain-sensing capability. Sol. Energy Mater. Sol. Cells 2017, 161, 77–88. [Google Scholar] [CrossRef]
- Lim, M.-J.; Lee, H.K.; Nam, I.-W.; Kim, H.-K. Carbon nanotube/cement composites for crack monitoring of concrete structures. Compos. Struct. 2017, 180, 741–750. [Google Scholar] [CrossRef]
- Al-Dahawi, A.; Sarwary, M.H.; Öztürk, O.; Yıldırım, G.; Akın, A.; Şahmaran, M.; Lachemi, M. Electrical percolation threshold of cementitious composites possessing self-sensing functionality incorporating different carbon-based materials. Smart Mater. Struct. 2016, 25, 105005. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Ruiz-Sandoval, M.; Kurata, N. Smart sensing technology for structural health monitoring. In Proceedings of the 13th World Conference Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Basharat, A.; Catbas, N.; Shah, M. A Framework for Intelligent Sensor Network with Video Camera for Structural Health Monitoring of Bridges. In Proceedings of the Third IEEE International Conference on Pervasive Computing and Communications Workshops, Kauai, HI, USA, 8–12 March 2005; pp. 385–389. [Google Scholar]
- Maluf, N.; Williams, K. An Introduction to Microelectromechanical Systems Engineering; Artech House Inc.: Norwood, MA, USA, 2004. [Google Scholar]
- Bae, G.; Seo, M.; Lee, S.; Bae, D.; Lee, M. Colorimetric Detection of Mechanical Deformation in Metals using Thin-Film Mechanochromic Sensor. Adv. Mater. Technol. 2021, 6, 2100479. [Google Scholar] [CrossRef]
- You, I.; Mackanic, D.G.; Matsuhisa, N.; Kang, J.; Kwon, J.; Beker, L.; Mun, J.; Suh, W.; Kim, T.Y.; Tok, J.B.-H.; et al. Artificial multimodal receptors based on ion relaxation dynamics. Science 2020, 370, 961–965. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Barbee, M.H.; Cho, S.; Cho, S.; Shanker, R.; Kim, J.; Myoung, J.; Kim, M.P.; Baig, C.; et al. A Hierarchical Nanoparticle-in-Micropore Architecture for Enhanced Mechanosensitivity and Stretchability in Mechanochromic Electronic Skins. Adv. Mater. 2019, 31, 1808148. [Google Scholar] [CrossRef]
- Wang, X.-Q.; Wang, C.-F.; Zhou, Z.-F.; Chen, S. Robust Mechanochromic Elastic One-Dimensional Photonic Hydrogels for Touch Sensing and Flexible Displays. Adv. Opt. Mater. 2014, 2, 652–662. [Google Scholar] [CrossRef]
- Nishikawa, T.; Yoshida, J.; Sugiyama, T.; Fujino, Y. Concrete Crack Detection by Multiple Sequential Image Filtering. Comput. Civ. Infrastruct. Eng. 2012, 27, 29–47. [Google Scholar] [CrossRef]
- Kim, H.; Kim, G.; Lee, S.; Son, M.; Choe, G.; Nam, J. Strain rate effects on the compressive and tensile behavior of bundle-type polyamide fiber-reinforced cementitious composites. Compos. Part B Eng. 2019, 160, 50–65. [Google Scholar] [CrossRef]
- Chakraborty, J.; Katunin, A.; Klikowicz, P.; Salamak, M. Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors. Sensors 2019, 19, 3879. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, H.R.; Mahdavi, N.; Bayat, M. A novel damage identification method based on short time Fourier transform and a new efficient index. Structures 2021, 33, 3605–3614. [Google Scholar] [CrossRef]
- Yan, J.; Downey, A.; Cancelli, A.; Laflamme, S.; Chen, A.; Li, J.; Ubertini, F. Concrete Crack Detection and Monitoring Using a Capacitive Dense Sensor Array. Sensors 2019, 19, 1843. [Google Scholar] [CrossRef]
- Tabatabaeian, A.; Liu, S.; Harrison, P.; Schlangen, E.; Fotouhi, M. A review on self-reporting mechanochromic composites: An emerging technology for structural health monitoring. Compos. Part A Appl. Sci. Manuf. 2022, 163, 107236. [Google Scholar] [CrossRef]
- Ahmadi, H.R.; Anvari, D. Health Monitoring of Pedestrian Truss Bridges Using Cone-Shaped Kernel Distribution. Smart Struct. Syst. 2018, 22, 699–709. [Google Scholar]
- Szeląg, M. Evaluation of Cracking Patterns in Cement Composites—From Basics to Advances: A Review. Materials 2020, 13, 2490. [Google Scholar] [CrossRef]
- Zhang, H.; Li, J.; Kang, F.; Zhang, J. Monitoring and evaluation of the repair quality of concrete cracks using piezoelectric smart aggregates. Constr. Build. Mater. 2022, 317, 125775. [Google Scholar] [CrossRef]
- Kocherla, A.; Duddi, M.; Subramaniam, K.V.L. Embedded PZT sensors for monitoring formation and crack opening in concrete structures. Measurement 2021, 182, 109698. [Google Scholar] [CrossRef]
- Berrocal, C.G.; Fernandez, I.; Rempling, R. Crack monitoring in reinforced concrete beams by distributed optical fiber sensors. Struct. Infrastruct. Eng. 2021, 17, 124–139. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Density (g/cm3) | Fineness (cm2/g) | Absorptance (%) | |
|---|---|---|---|---|
| OPC | Ordinary Portland cement | 3.15 | 3200 | - |
| Fly ash | Class C | 2.20 | 3000 | - |
| Silica sand | Type 7 | 2.64 | - | 0.38 |
| Fck (MPa) | W/B | Cement | Water | Fly Ash | Silica Sand | Steel Fiber |
|---|---|---|---|---|---|---|
| 40 | 0.40 | 1.00 | 0.47 | 0.18 | 0.41 | 0.10 |
| Time | P (Non-F–T) | 30 min | 1 h | 1 h 30 min | 2 h | 2 h 30 min | 3 h | 3 h 30 min |
| ID | No. 0 | No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | No. 6 | No. 7 |
| Temp. (°C) | 24.5 | 1.6 | 8.8 | 13.2 | 17.1 | 23.8 | 25.1 | 24.9 |
| ID | No. 0 | No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | No. 6 | No. 7 |
|---|---|---|---|---|---|---|---|---|
| Section A (mm) | 40.32 | 41.95 | 42.21 | 41.89 | 39.55 | 40.55 | 42.08 | 40.41 |
| Section B (mm) | 101.66 | 102.06 | 103.68 | 103.23 | 103.15 | 101.80 | 102.55 | 101.82 |
| Range | Return Value | |
|---|---|---|
| Step 1 | H < 20, H > 150, S < 50, V < 50 | H, S, V = 0, 0, 0 |
| Step 2 | H > 20 | H, S, V = H, 255, 255 |
| Sensor Position | A-4-1 | A-4-2 | A-4-3 | A-4-4 |
|---|---|---|---|---|
| Sensor image |  |  |  |  |
| Crack width—scale (mm) | 0.050 | 0.300 | 1.400 | 4.000 |
| Crack width—image analysis (mm) | 0.043 | 0.272 | 0.558 | 1.517 |
| Sensor position | B-7-1 | B-7-2 | B-7-3 | B-7-4 |
| Sensor image |  |  |  |  |
| Crack width—scale (mm) | 0.500 | 0.950 | 1.000 | 1.100 |
| Crack width—image analysis (mm) | 0.528 | 0.611 | 0.477 | 0.482 |
| Sensor position | C-6-1 | C-6-2 | C-6-3 | C6-4 |
| Sensor image |  |  |  |  |
| Crack width—scale (mm) | 0.250 | 0.650 | 1.700 | 5.000 |
| Crack width—image analysis (mm) | 0.334 | 1.041 | 2.094 | 7.003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pyeon, S.; Kim, H.; Choe, G.; Lee, M.; Jeon, J.; Kim, G.; Nam, J. Crack Evaluation of Concrete Using Mechanochromic Sensor. Materials 2023, 16, 662. https://doi.org/10.3390/ma16020662
Pyeon S, Kim H, Choe G, Lee M, Jeon J, Kim G, Nam J. Crack Evaluation of Concrete Using Mechanochromic Sensor. Materials. 2023; 16(2):662. https://doi.org/10.3390/ma16020662
Chicago/Turabian StylePyeon, Sujeong, Hongseop Kim, Gyeongcheol Choe, Myeongkyu Lee, Junseo Jeon, Gyuyong Kim, and Jeongsoo Nam. 2023. "Crack Evaluation of Concrete Using Mechanochromic Sensor" Materials 16, no. 2: 662. https://doi.org/10.3390/ma16020662