
Modeling and Simulation of the Hysteretic Behavior of Concrete under Cyclic Tension–Compression Using the Smeared Crack Approach

Abstract
:1. Introduction
2. Theoretical Framework of Smeared Crack Model
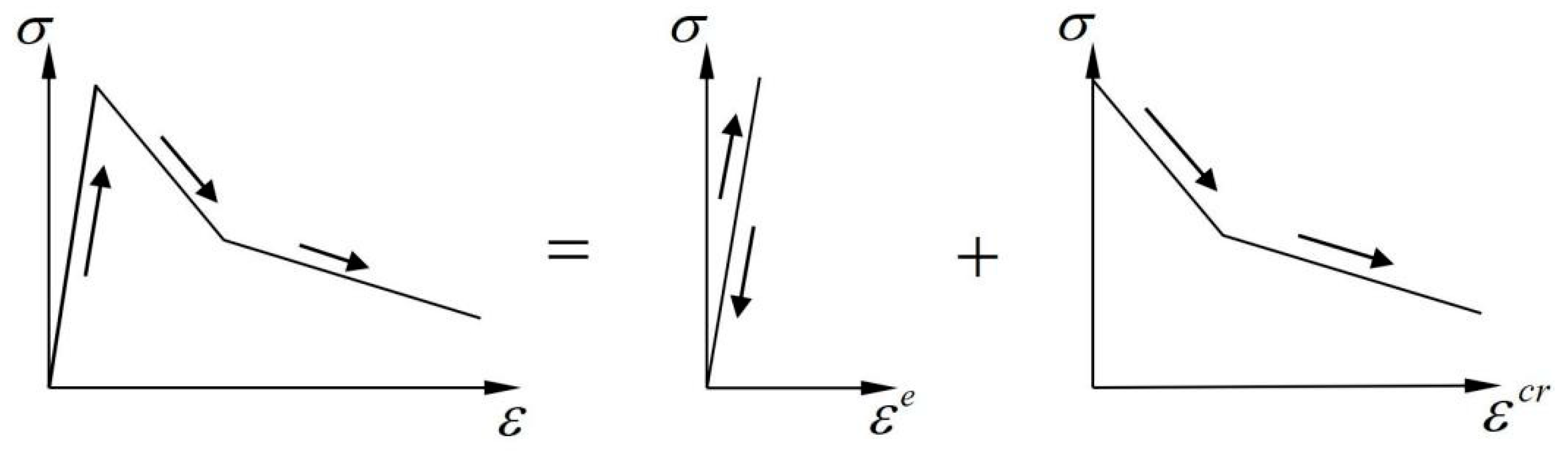
2.1. Overview of the Smeared Crack Model
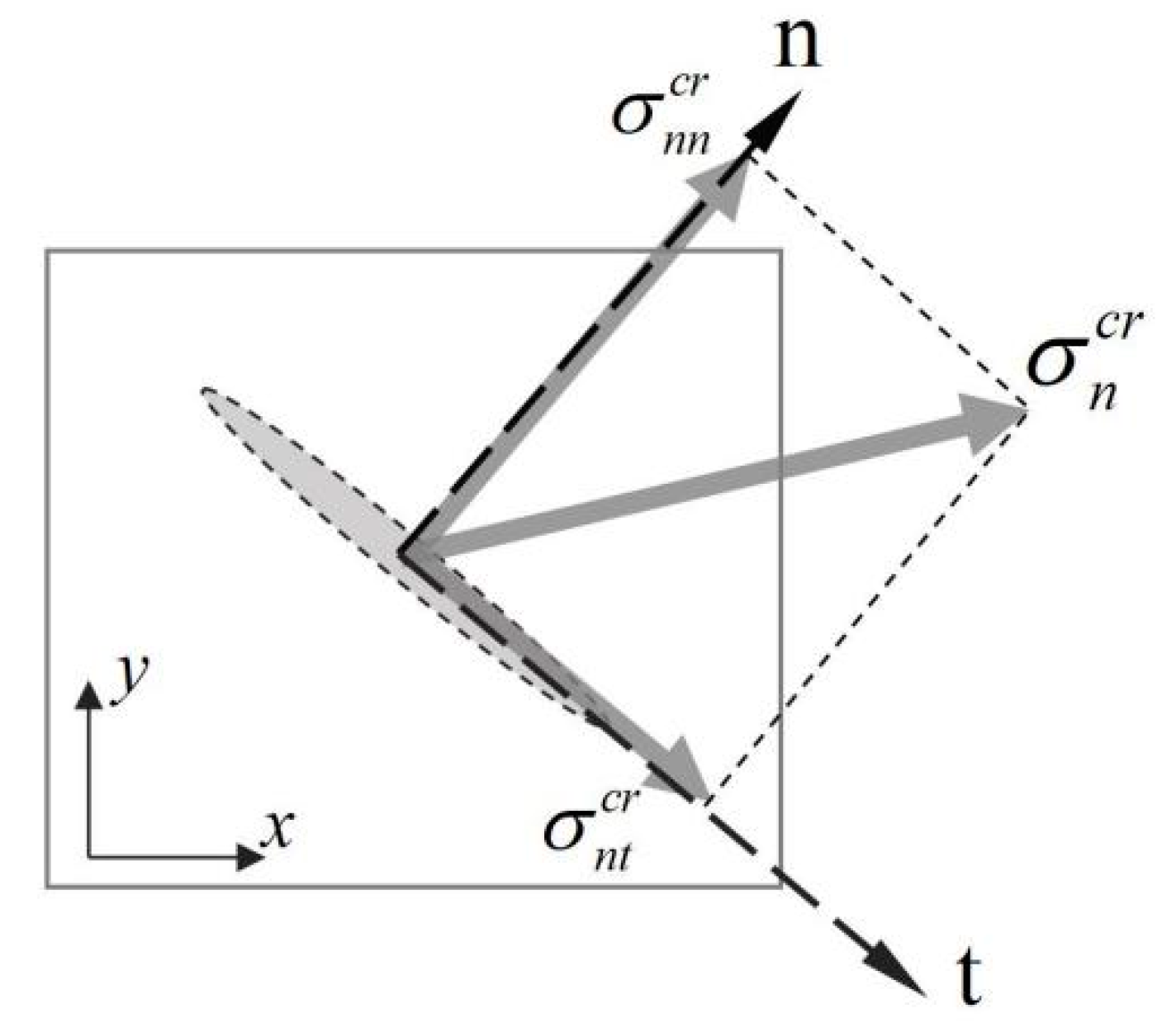
2.2. Constitutive Relations in Local Coordinate System
2.3. Constitutive Relations of Cracked Concrete in Global Coordinate System
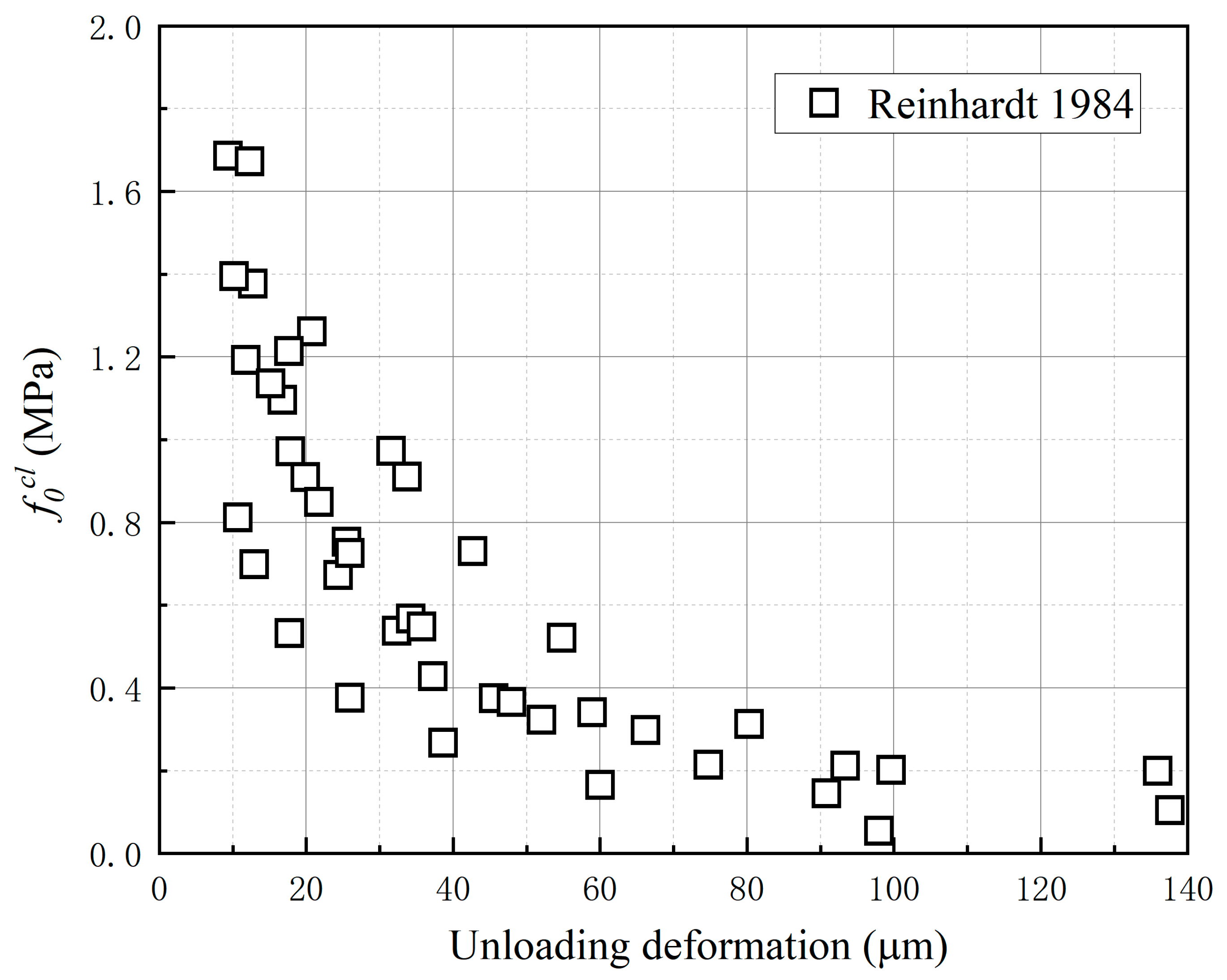
2.4. Determination of Cracking Modulus
3. Hysteretic Rules Based on Crack Opening–Closing Mechanism
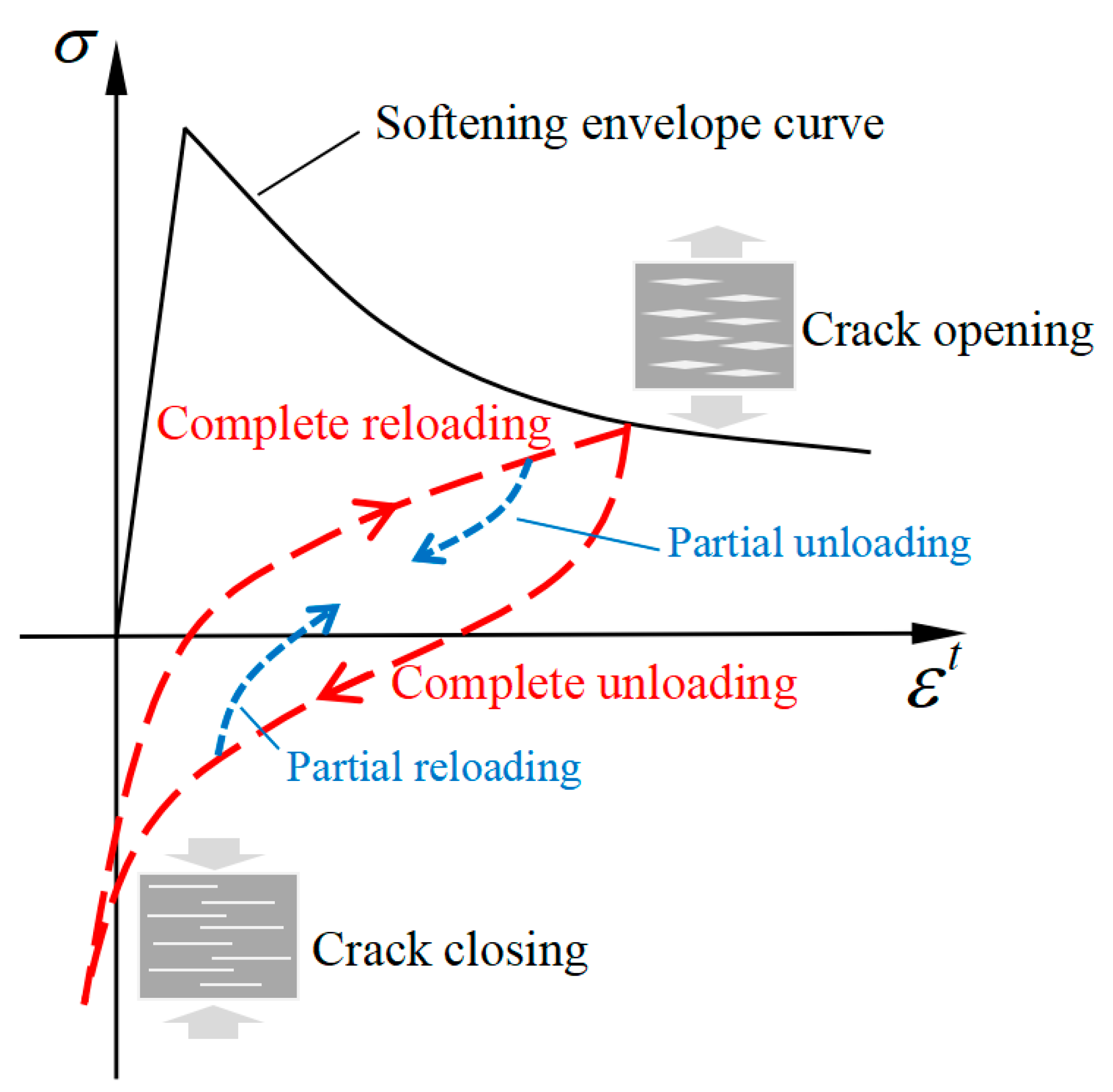
3.1. Hysteretic Characteristics of Concrete under Tension–Compression Reversals
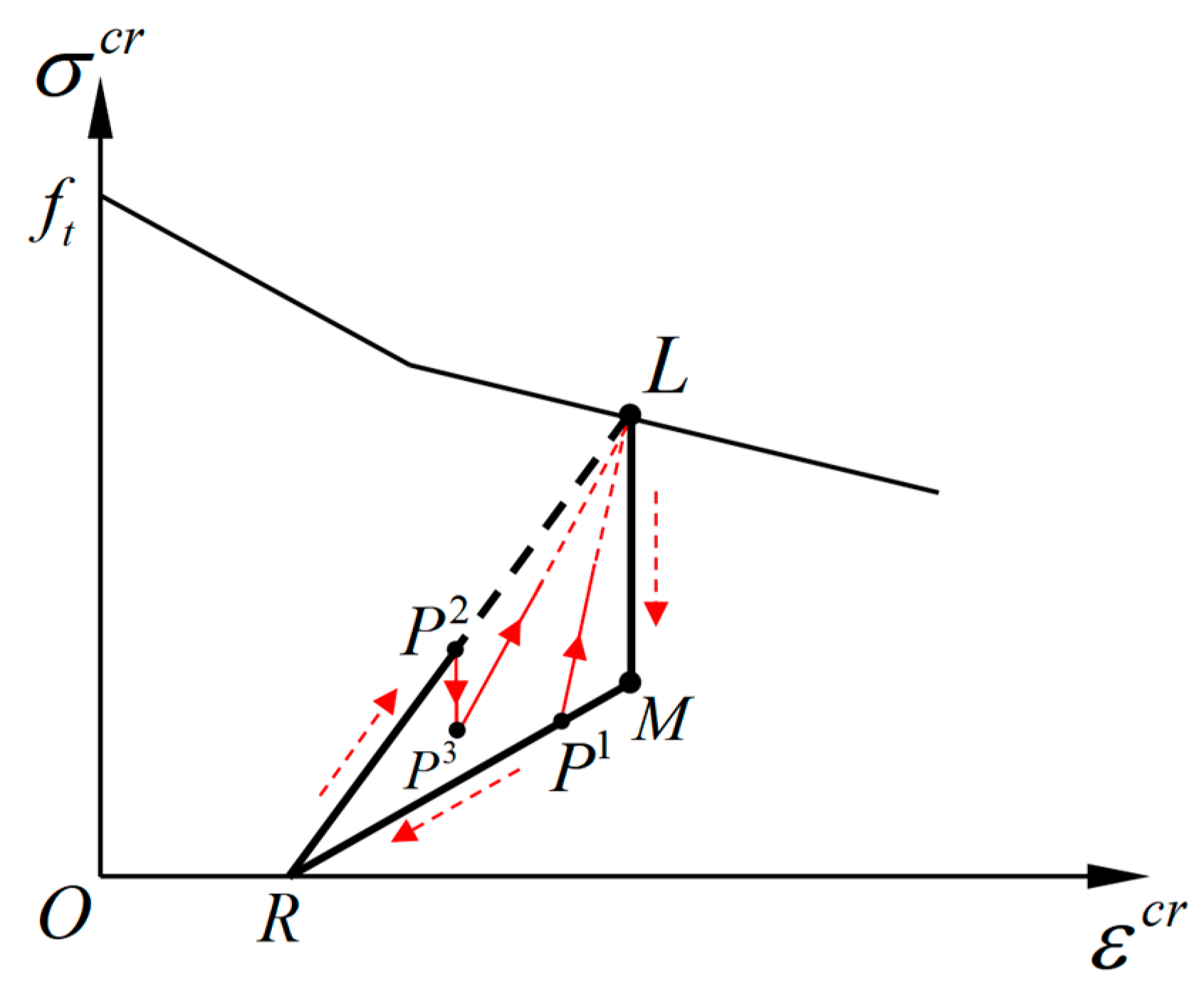
3.2. Proposed Rules for Complete Unloading–Reloading Paths
3.3. Proposed Rules for Partial Unloading–Reloading Paths
3.4. Determination of the Model Parameters
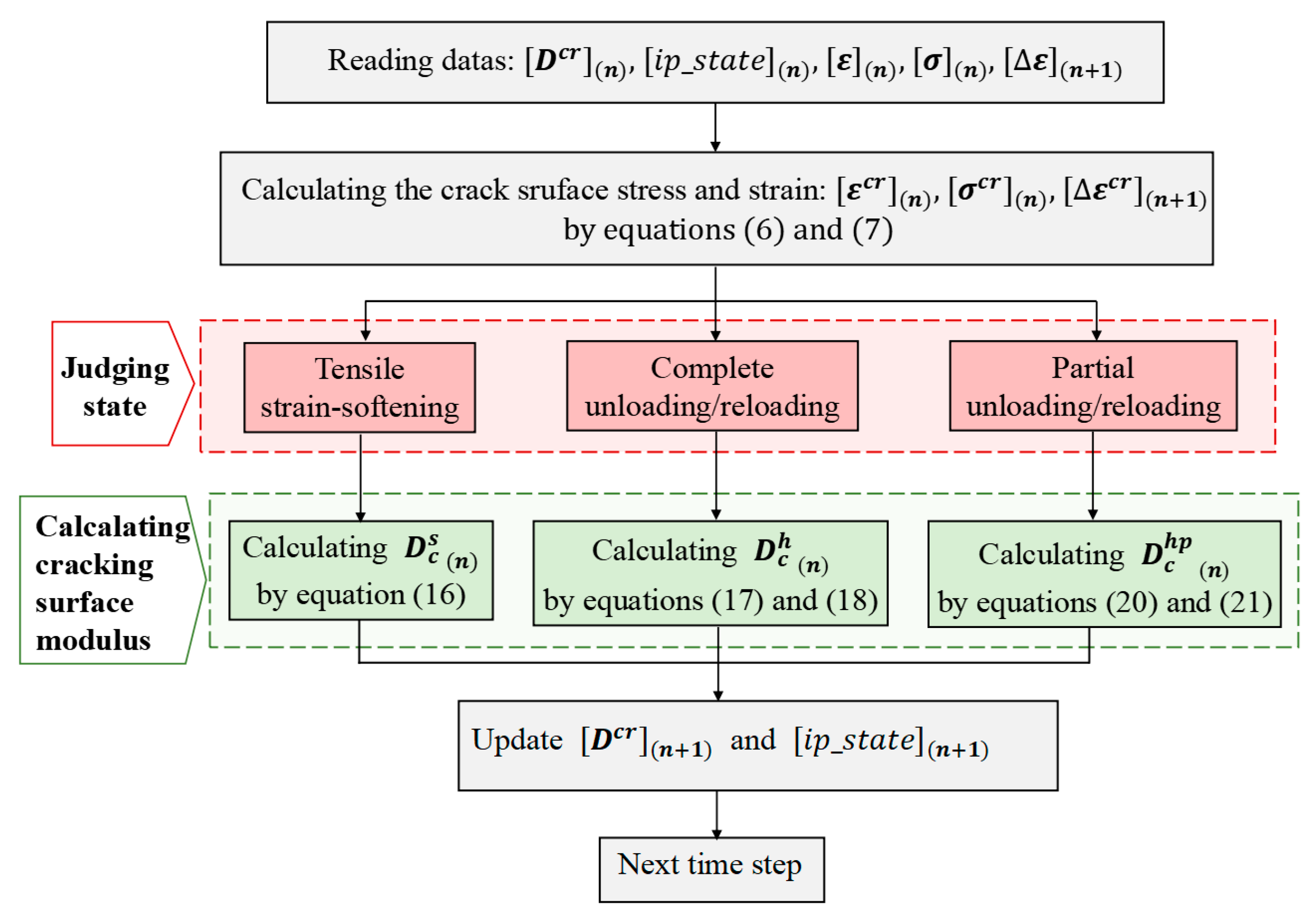
3.5. Numerical Implementation of the Proposed Model
4. Simulation Results and Discussion
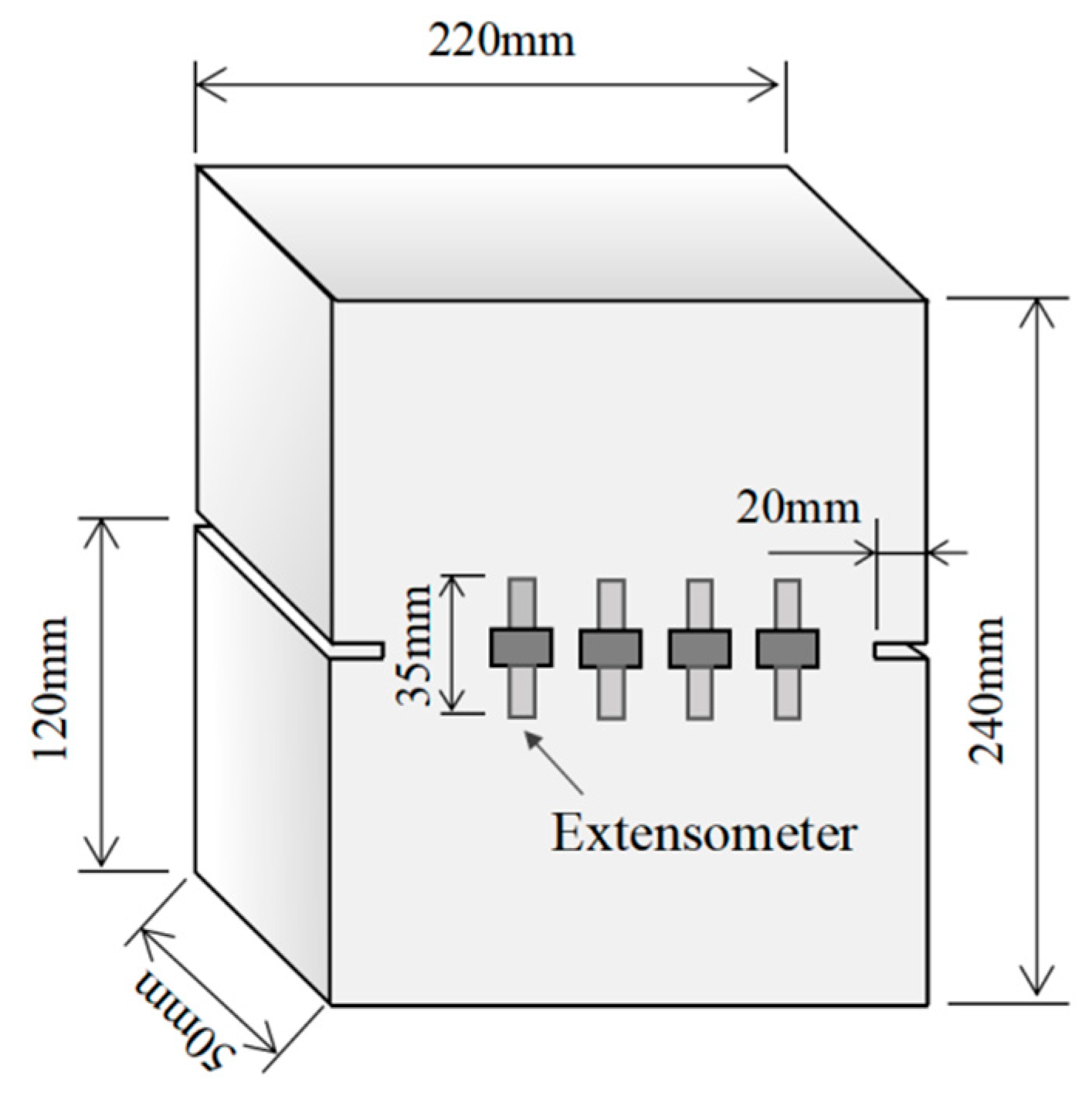
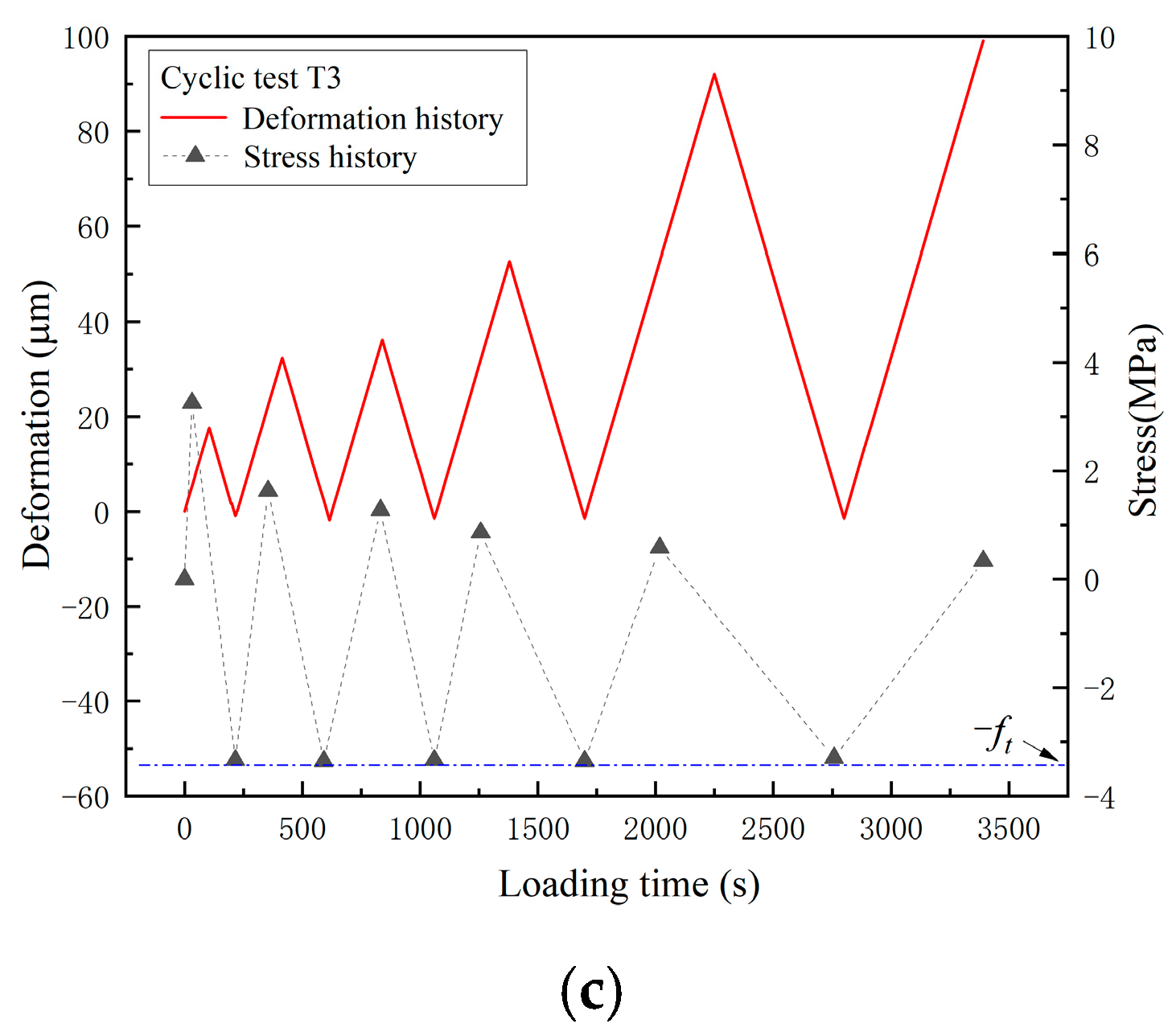
4.1. Cyclic Tests of Concrete
4.2. Numerical Model and Parameters
4.3. Simulation Results of Direct Tension Test
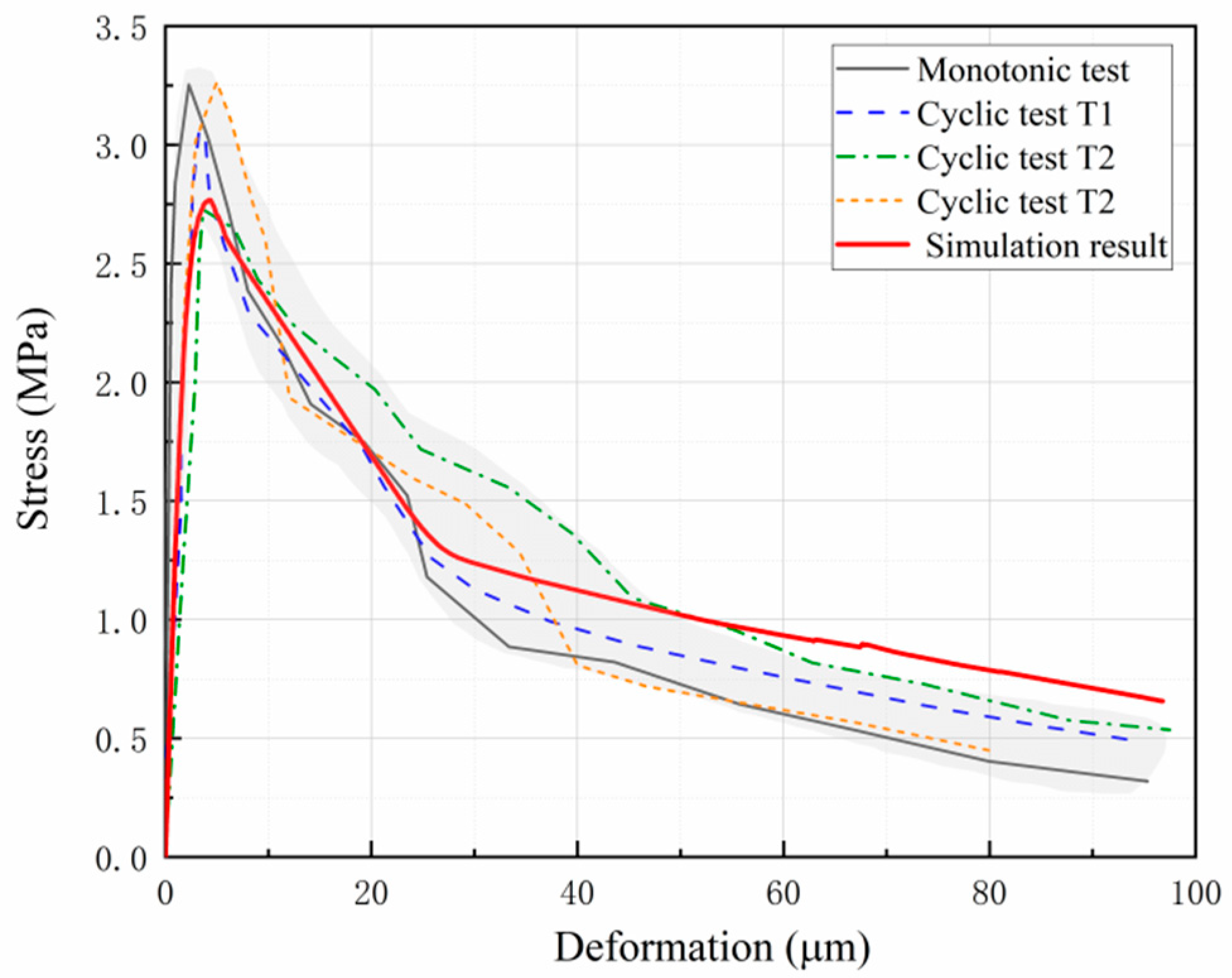
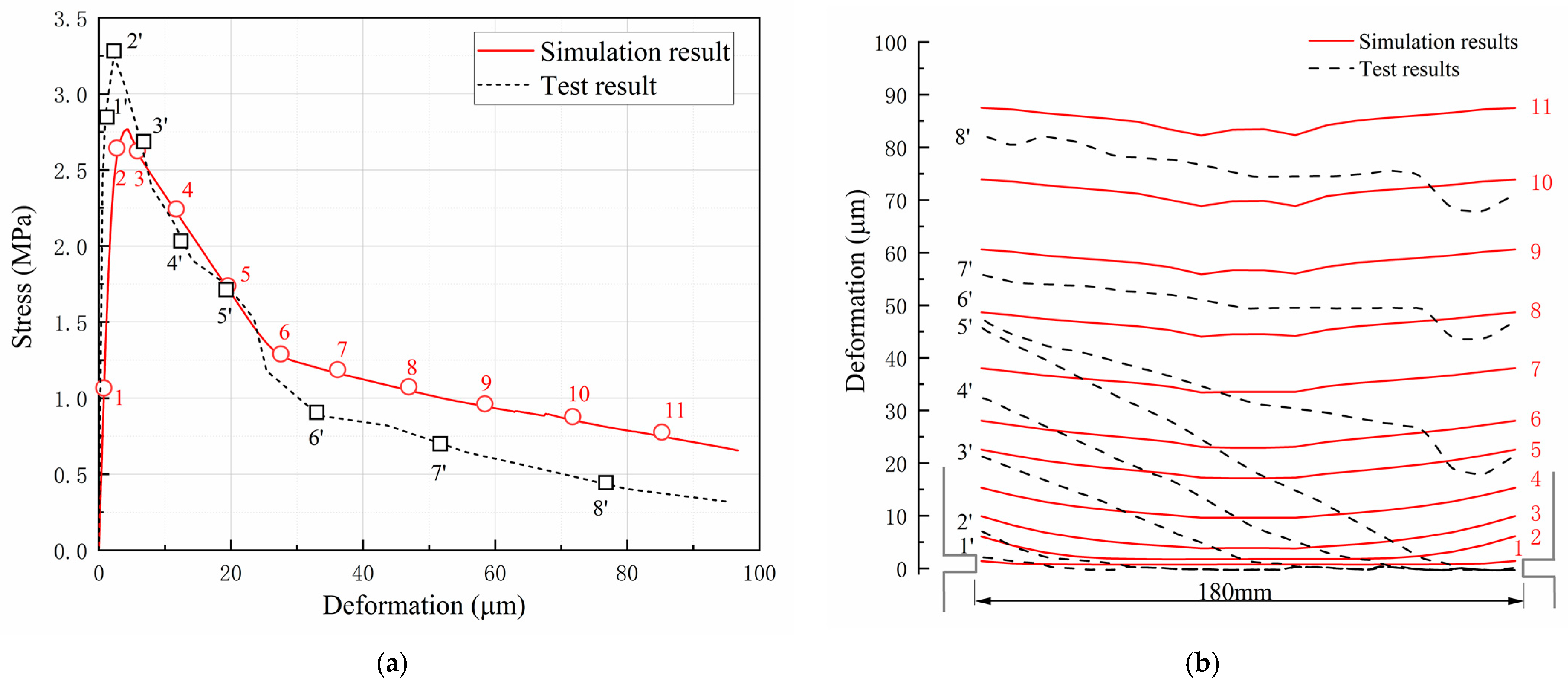
4.3.1. The Stress-Deformation Curve
4.3.2. Evolution of Deformation Distribution
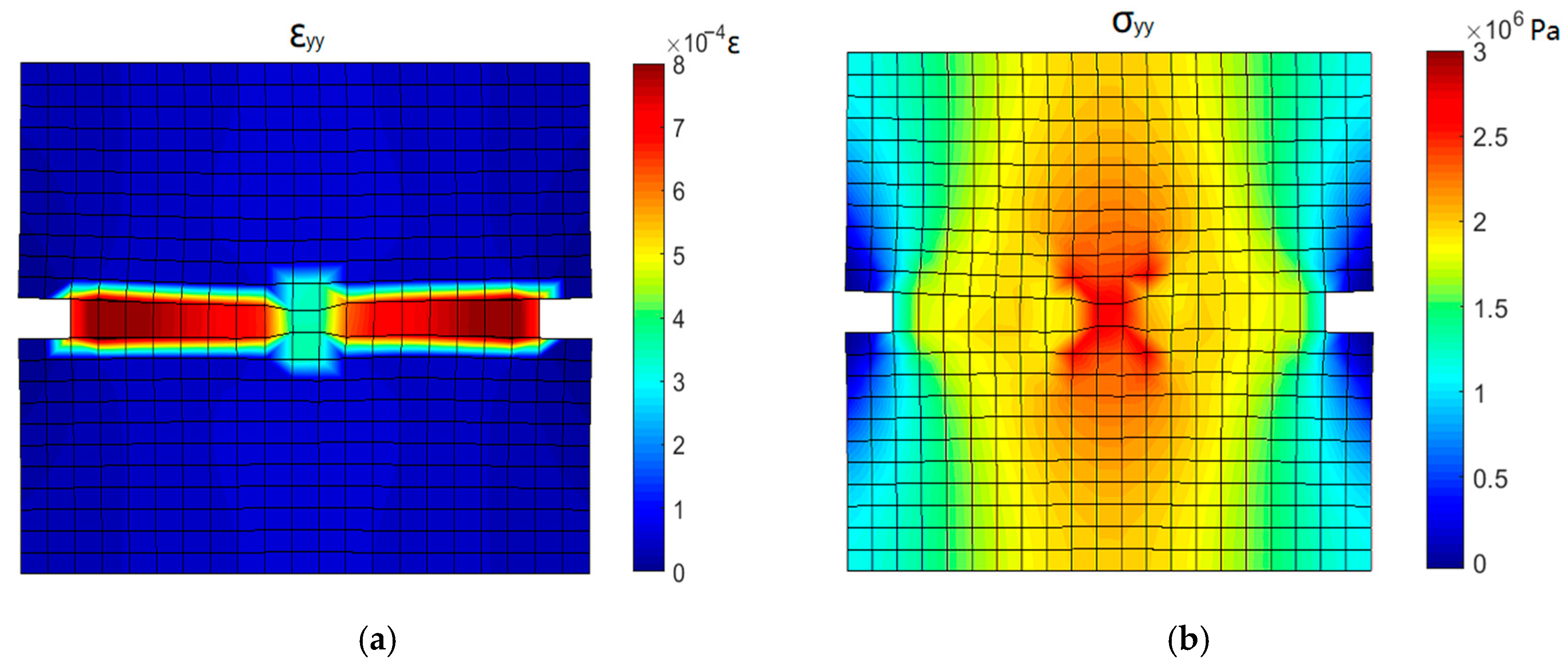
4.3.3. Simulation Results of Stress and Strain Distribution
4.4. Simulation Results of Cyclic Tension–Compression Test
4.4.1. The Stress-Deformation Curves
4.4.2. Stress and Strain Contours of Crack-Closure Process
4.4.3. Evolution of Stiffness and Dissipated Energy
5. Conclusions
- (1)
- By modifying the cracking modulus, the opening–closing behavior of the crack surface that produces the hysteretic phenomenon of concrete under cyclic tension–compression is directly modeled in the framework of the smeared crack theory.
- (2)
- The proposed model is able to reproduce the hysteretic curves of concrete under complex tensile cyclic load conditions, as well as the degradation of reloading stiffness, energy dissipation, and stiffness recovery due to the crack closure.
- (3)
- The model can simulate the initiation and propagation of concrete cracks under uniaxial cyclic tensile load, as well as the opening and closing behavior of the crack surface during the unloading–reloading process.
- (4)
- The model adopts linear unloading–reloading paths and has only two parameters, which make the model easy to use and suitable for introduction into finite element programs.
- (5)
- The model was verified by comparing the results with several cyclic tests. In addition, the proposed model can be applied to the nonlinear analysis of real concrete structures.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sharma, R.; Ren, W.; Mcdonald, S.A.; Yang, Z.J. Micro-mechanisms of concrete failure under cyclic compression: X-ray tomographic in-situ observations. In Proceedings of the 9th International Conference on Fracture Mechanics of Concrete and Concrete Structures (FraMCoS-9), Berkeley, CA, USA, 29 May 2016. [Google Scholar]
- Li, B.; Xu, L.; Chi, Y.; Huang, B.; Li, C. Experimental investigation on the stress-strain behavior of steel fiber reinforced concrete subjected to uniaxial cyclic compression. Constr. Build. Mater. 2017, 140, 109–118. [Google Scholar] [CrossRef]
- Isojeh, B.; El-Zeghayar, M.; Vecchio, F.J. Concrete damage under fatigue loading in uniaxial compression. ACI Mater. J. 2017, 114, 225–235. [Google Scholar] [CrossRef]
- Isojeh, B.; El-Zeghayar, M.; Vecchio, F.J. Simplified constitutive model for fatigue behavior of concrete in compression. J. Mater. Civ. Eng. 2017, 29, 04017028. [Google Scholar] [CrossRef] [Green Version]
- Sima, J.F.; Roca, P.; Molins, C. Cyclic constitutive model for concrete. Eng. Struct. 2008, 30, 695–706. [Google Scholar] [CrossRef] [Green Version]
- De Maio, U.; Greco, F.; Leonetti, L.; Blasi, P.N.; Pranno, A. A cohesive fracture model for predicting crack spacing and crack width in reinforced concrete structures. Eng. Fail. Anal. 2022, 139, 106452. [Google Scholar] [CrossRef]
- Foster, S.J.; Marti, P. Cracked membrane model: Finite element implementation. J. Struct. Eng. 2003, 129, 1155–1163. [Google Scholar] [CrossRef]
- Grassl, P.; Jirásek, M. Damage-plastic model for concrete failure. Int. J. Solids Struct. 2006, 43, 7166–7196. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Li, J.; Ju, J.W. 3D elastoplastic damage model for concrete based on novel decomposition of stress. Int. J. Solids Struct. 2016, 94, 125–137. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, L.H.; Liu, Z.; Jia, M. An elastic-plastic damage constitutive model of concrete under cyclic loading and its numerical implementation. Eng. Mech. 2023, 40, 152–161. [Google Scholar] [CrossRef]
- Yankelevsky, D.Z.; Reinhardt, H.W. Uniaxial behavior of concrete in cyclic tension. J. Struct. Eng. 1989, 115, 166–182. [Google Scholar] [CrossRef]
- Chang, G.A.; Mander, J.B. Seismic Energy Based Fatigue Damage Analysis of Bridge Columns: Part 1—Evaluation of Seismic Capacity; NCEER Technical Report NCEER-94-6; University at Buffalo: Buffalo, NY, USA, 1994. [Google Scholar]
- Aslani, F.; Jowkarmeimandi, R. Stress–strain model for concrete under cyclic loading. Mag. Concr. Res. 2012, 64, 673–685. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.D.; Bu, J.B.; Xu, L.Y. Effect of strain rate on post-peak cyclic behavior of concrete in direct tension. Constr. Build. Mater. 2016, 124, 746–754. [Google Scholar] [CrossRef]
- McCall, K.R.; Guyer, R.A. Equation of state and wave propagation in hysteretic nonlinear elastic materials. J. Geophys. Res. Solid Earth 1994, 99, 23887–23897. [Google Scholar] [CrossRef]
- Chen, X.D.; Huang, Y.B.; Chen, C.; Lu, J.; Fan, X.Q. Experimental study and analytical modeling on hysteresis behavior of plain concrete in uniaxial cyclic tension. Int. J. Fatigue 2017, 96, 261–269. [Google Scholar] [CrossRef]
- Chen, X.D.; Xu, L.Y.; Bu, J.W. Dynamic tensile test of fly ash concrete under alternating tensile–compressive loading. Mater. Struct. 2018, 51, 7667–7674. [Google Scholar] [CrossRef]
- Long, Y.C.; He, Y.M. An anisotropic damage model for concrete structures under cyclic loading-uniaxial modeling. J. Phys. Conf. Ser. 2017, 842, 012040. [Google Scholar] [CrossRef]
- Long, Y.C.; Yu, C.T. Numerical Simulation of the Damage Behavior of a Concrete Beam with an Anisotropic Damage Model. Strength Mater. 2018, 50, 735–742. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L.; Zhao, L.; Wu, Z.; Guo, B. A Damage Model of Concrete including Hysteretic Effect under Cyclic Loading. Materials 2022, 15, 5062. [Google Scholar] [CrossRef] [PubMed]
- Tudjono, S.; Lie, H.A.; As’ad, S. Reinforced concrete finite element modeling based on the discrete crack approach. Civ. Eng. Dimens. 2016, 18, 72–77. [Google Scholar] [CrossRef] [Green Version]
- Areias, P.; Rabczuk, T.; de Sá, J.C. A novel two-stage discrete crack method based on the screened Poisson equation and local mesh refinement. Comput. Mech. 2016, 58, 1003–1018. [Google Scholar] [CrossRef]
- Fujiwara, Y.; Takeuchi, N.; Shiomi, T.; Kambayashi, A. Discrete crack analysis for concrete structures using the hybrid-type penalty method. Comput. Concr. 2015, 16, 587–604. [Google Scholar] [CrossRef]
- Shi, Z.; Nakano, M.; Nakamura, Y.; Liu, C. Discrete crack analysis of concrete gravity dams based on the known inertia force field of linear response analysis. Eng. Fract. Mech. 2014, 115, 122–136. [Google Scholar] [CrossRef]
- Thybo, A.E.A.; Michel, A.; Stang, H. Smeared crack modelling approach for corrosion-induced concrete damage. Mater. Struct. 2017, 50, 146. [Google Scholar] [CrossRef] [Green Version]
- Edalat-Behbahani, A.; Barros, J.A.; Ventura-Gouveia, A. Three dimensional plastic-damage multidirectional fixed smeared crack approach for modelling concrete structures. Int. J. Solids Struct. 2017, 115, 104–125. [Google Scholar] [CrossRef]
- Edalat-Behbahani, A.; Barros, J.; Ventura-Gouveia, A. Application of plastic-damage multidirectional fixed smeared crack model in analysis of RC structures. Eng. Struct. 2016, 125, 374–391. [Google Scholar] [CrossRef] [Green Version]
- Amir, P. Seismic improvement of gravity dams using isolation layer in contact area of dam–reservoir in smeared crack approach. Iran. J. Sci. Technol. Civ. Eng. 2018, 43, 137–155. [Google Scholar] [CrossRef]
- Rots, J.G.; Nauta, P.G.; Kuster, G.; Blaauwendraad, J. Smeared crack approach and fracture localization in concrete. Heron 1985, 30, 1–48. [Google Scholar]
- Bažant, Z.P.; Oh, B.H. Crack band theory for fracture of concrete. Mater. Struct. 1983, 16, 155–177. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Pekau, O.A.; Zhang, C.; Wang, S. Seismic fracture analysis of concrete gravity dams based on nonlinear fracture mechanics. Eng. Fract. Mech. 2000, 65, 67–87. [Google Scholar] [CrossRef]
- Jirásek, M.; Bauer, M. Numerical aspects of the crack band approach. Comput. Struct. 2012, 110-111, 60–78. [Google Scholar] [CrossRef]
- Xu, W.; Waas, A.M. Modeling damage growth using the crack band model; effect of different strain measures. Eng. Fract. Mech. 2016, 152, 126–138. [Google Scholar] [CrossRef]
- Reinhardt, H.W.; Cornelissen, H. Post-peak cyclic behaviour of concrete in uniaxial tensile and alternating tensile and compressive loading. Cem. Concr. Res. 1984, 14, 263–270. [Google Scholar] [CrossRef]
- Reinhardt, H.W.; Cornelissen, H.; Hordijk, D.A. Tensile tests and failure analysis of concrete. J. Struct. Eng. 1986, 112, 2462–2477. [Google Scholar] [CrossRef]
- Mazars, J.; Berthaud, Y.; Ramtani, S. The unilateral behaviour of damaged concrete. Eng. Fract. Mech. 1990, 35, 629–635. [Google Scholar] [CrossRef]
- Zheng, F.G.; Wu, Z.R.; Gu, C.S.; Bao, T.F.; Hu, J. A plastic damage model for concrete structure cracks with two damage variables. Sci. China Technol. Sci. 2012, 55, 2971–2980. [Google Scholar] [CrossRef]
- Nouailletas, O.; La Borderie, C.; Perlot, C.; Rivard, P.; Ballivy, G. Experimental Study of Crack Closure on Heterogeneous Quasi-Brittle Material. J. Eng. Mech. 2015, 141, 1–11. [Google Scholar] [CrossRef]
- Zhang, P.; Ren, Q.; Lei, D. Hysteretic model for concrete under cyclic tension and tension-compression reversals. Eng. Struct. 2018, 163, 388–395. [Google Scholar] [CrossRef]
- Reinhardt, H.W. Fracture Mechanics of an Elastic Softening Material Like Concrete. Heron 1984, 29, 1–42. [Google Scholar]
- Červenka, J.; Červenka, V.; Laserna, S. On crack band model in finite element analysis of concrete fracture in engineering practice. Eng. Fract. Mech. 2018, 197, 27–47. [Google Scholar] [CrossRef]
- Deng, F.Q.; Chi, Y.; Xu, L.H.; Huang, L.; Hu, X. Constitutive behavior of hybrid fiber reinforced concrete subject to uniaxial cyclic tension: Experimental study and analytical modeling. Constr. Build. Mater. 2021, 295, 123650. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycle Number | Cyclic Test T1 | Cyclic Test T2 | Cyclic Test T3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Test (10−3 N/mm) | Simulation (10−3 N/mm) | Error (%) | Test (10−3 N/mm) | Simulation (10−3 N/mm) | Error (%) | Test (10−3 N/mm) | Simulation (10−3 N/mm) | Error (%) | |
| 1 | 2.45 | 2.44 | −0.16 | 7.37 | 9.37 | −21.4 | 15.68 | 15.23 | −2.94 |
| 2 | 3.31 | 2.96 | −11.6 | 7.74 | 11.32 | −31.6 | 25.11 | 22.54 | −11.4 |
| 3 | 2.12 | 2.45 | 13.3 | 8.75 | 13.43 | −34.8 | 27.1 | 26.27 | −3.18 |
| 4 | 2.28 | 2.24 | −1.66 | 12.39 | 17.33 | −28.5 | 32.77 | 40.5 | 19.1 |
| 5 | 2.87 | 2.62 | −9.27 | - | - | - | 51.05 | 58.69 | 13.0 |
| Total | 13.03 | 12.72 | −2.37 | 36.24 | 51.44 | −29.5 | 151.71 | 163.22 | 7.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Wang, S.; He, L. Modeling and Simulation of the Hysteretic Behavior of Concrete under Cyclic Tension–Compression Using the Smeared Crack Approach. Materials 2023, 16, 4442. https://doi.org/10.3390/ma16124442
Zhang P, Wang S, He L. Modeling and Simulation of the Hysteretic Behavior of Concrete under Cyclic Tension–Compression Using the Smeared Crack Approach. Materials. 2023; 16(12):4442. https://doi.org/10.3390/ma16124442
Chicago/Turabian StyleZhang, Pei, Shenshen Wang, and Luying He. 2023. "Modeling and Simulation of the Hysteretic Behavior of Concrete under Cyclic Tension–Compression Using the Smeared Crack Approach" Materials 16, no. 12: 4442. https://doi.org/10.3390/ma16124442