
Design of a Real-Time Corrosion Detection and Quantification Protocol for Automobiles


Abstract
:1. Introduction
2. Methodology
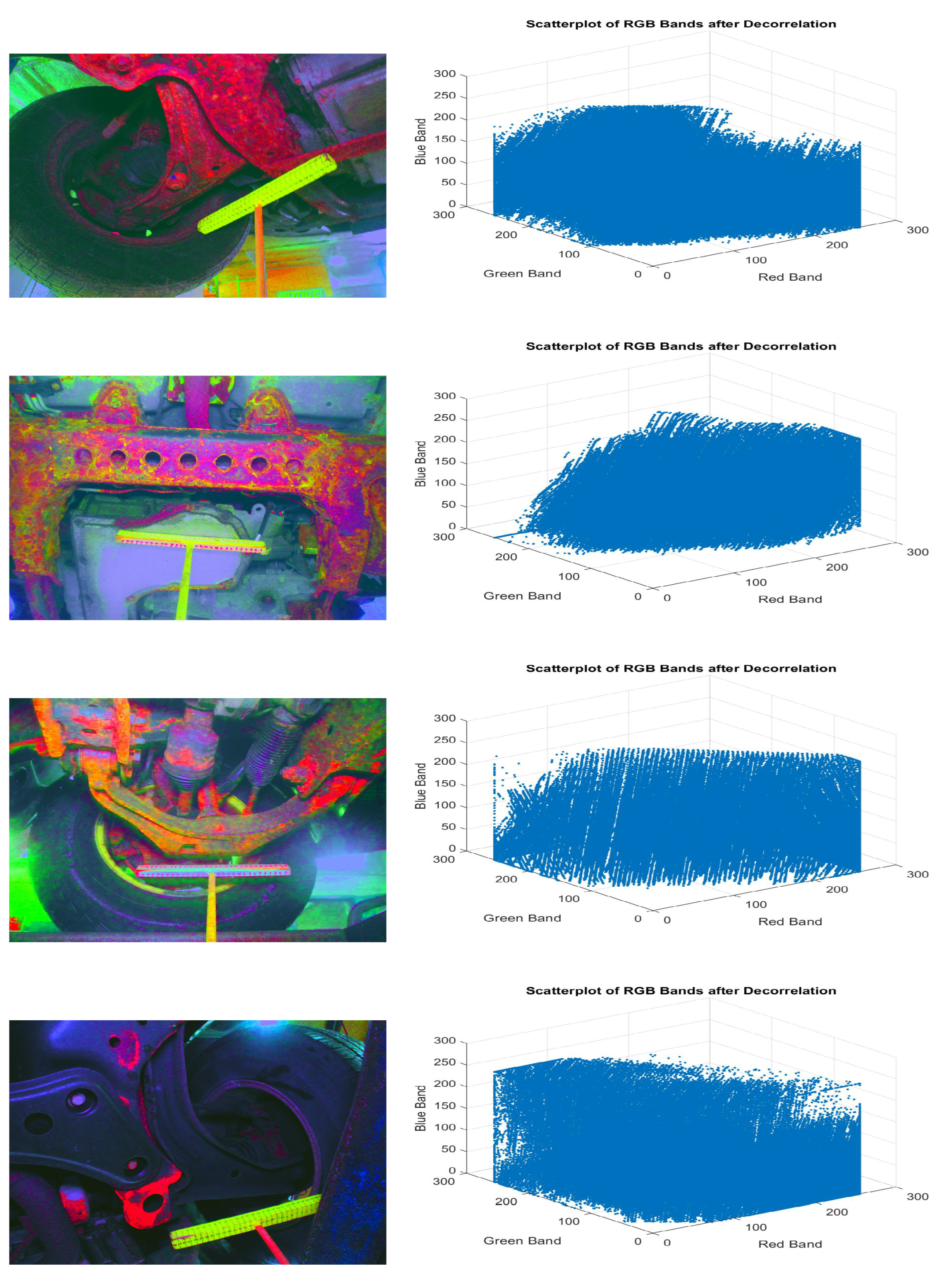
2.1. Rust Pixel Analysis
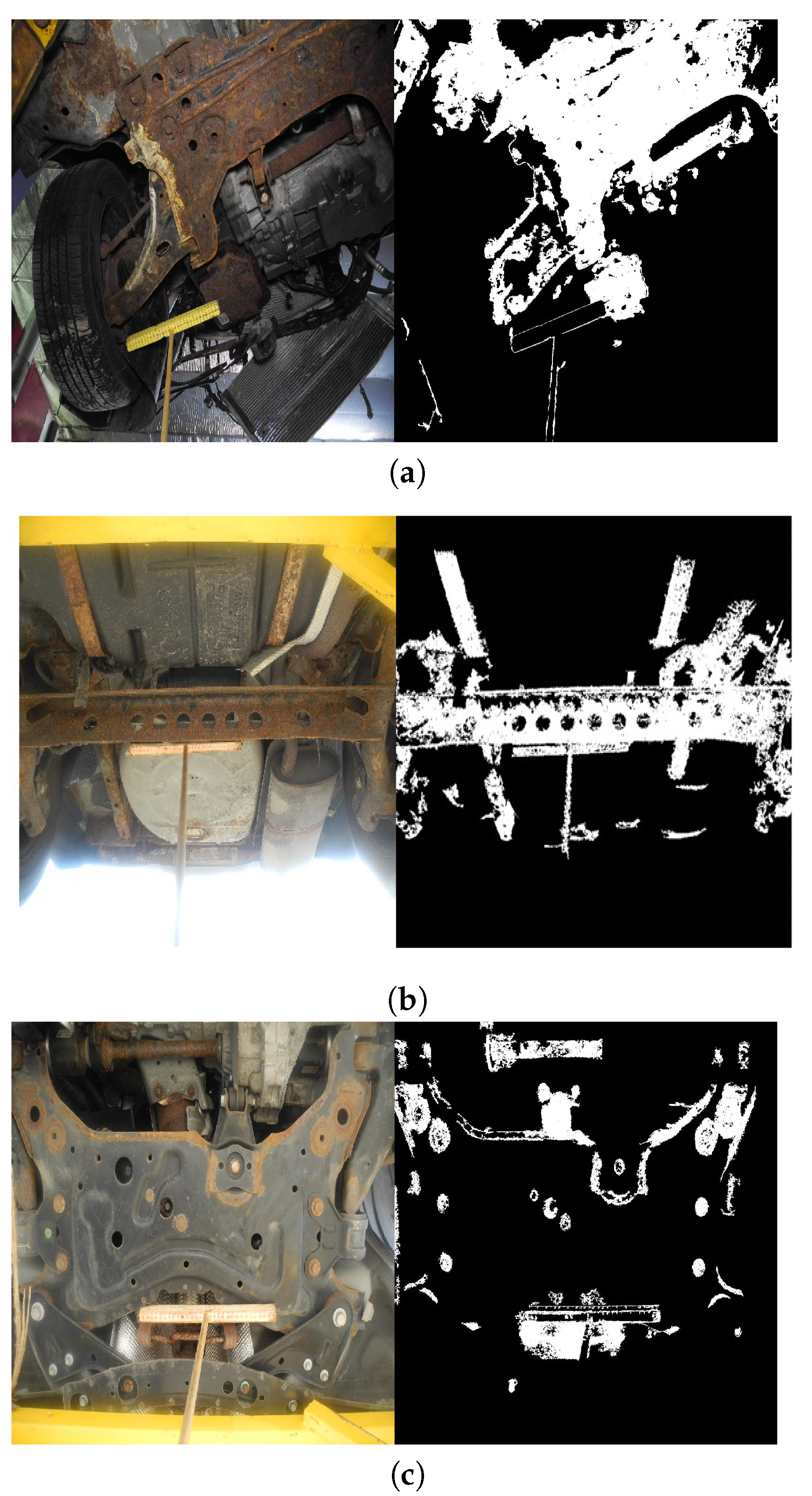
2.2. Corrosion Detection
2.3. Corrosion Metrics
3. Experimental Results
3.1. Corrosion Detection and Quantification
3.2. Performance Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wagner, I. Number of Vehicles in Use Worldwide 2006–2015. Available online: http://www.statista.com/statistics/281134/number-of-vehicles-in-use-worldwide/ (accessed on 30 January 2022).
- Koch, G.H.; Brongers, M.P.H.; Thompson, N.G.; Virmani, Y.P.; Payer, J.H. Corrosion Costs and Preventive Strategies in the United States; Report No. FHWA-RD-01-156; CC Technologies Laboratories, Inc.: Dublin, OH, USA; NACE International for Office of Infrastructure Research and Development, Federal Highway Administration: McLean, VA, USA, 2001; p. 773. [Google Scholar]
- Wang, Y.; Underhill, R.S.; Klassen, B. Review of Corrosion Control Programs and Research Activities for Army Vehicles; Defence R&D Canada—Atlantic: Ottawa, ON, Canada, 2006. [Google Scholar]
- Sharma, V.; Thind, T. Techniques for detection of rusting of metals using image processing: A Survey. Int. J. Emerg. Sci. Eng. (IJESE) 2013, 1, 60–62. [Google Scholar]
- Medeiros, F.N.S.; Ramalho, G.L.B.; Bento, M.P.; Medeiros, L.C.L. On the Evaluation of Texture and Color Features for Nondestructive Corrosion Detection. EURASIP J. Adv. Signal Process. 2010, 2010, 817473. [Google Scholar] [CrossRef] [Green Version]
- Diaz, J.A.I.; Ligeralde, M.I.; Jose, J.A.C.; Bandala, A.A. Rust Detection using Image Processing via Matlab. In Proceedings of the IEEE Region 10 Conference (TENCON) Proceedings, Penang, Malaysia, 5–8 November 2017. [Google Scholar]
- Enikeev, M.; Gubaydullin, I.; Maleeva, M. Analysis of corrosion process development on metals by means of computer vision. Eng. J. 2017, 21, 183–192. [Google Scholar] [CrossRef] [Green Version]
- Ivasenko, I.; Chervatyuk, V. Detection of rust defects of protective coatings based on HSV color model. In Proceedings of the IEEE Ukraine Conference on Electrical and Computer Engineering, Lviv, Ukraine, 2–6 July 2019. [Google Scholar]
- Zaidan, B.B.; Zaidan, A.A.; Alanazi, H.O.; Alnaqeib, R. Towards Corrosion Detection System. Int. J. Comput. Sci. Issues 2017, 7, 46. [Google Scholar]
- Chaudhuri, B.B.; Sarkar, N. Texture Segmentation Using Fractal Dimension. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 72–77. [Google Scholar] [CrossRef]
- Gao, Y.; Suryanto, B.; Chai, H.K.; Forde, M.C. Evaluating the effect of corrosion on shear-critical RC beams by integrated NDT. Dev. Built Environ. 2021, 7, 100050. [Google Scholar] [CrossRef]
- Khayatazad, M.; Pue, L.D.; Waele, W.D. Detection of corrosion on steel structures using automated image processing. Dev. Built Environ. 2020, 3, 100022. [Google Scholar] [CrossRef]
- Feliciano, F.F.; Leta, F.R.; Mainier, F.B. Texture digital analysis for corrosion monitoring. Corros. Sci. 2015, 93, 138–147. [Google Scholar] [CrossRef]
- Ghanta, S.; Karp, T.; Lee, S. Wavelet domain detection of rust in steel bridge images. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems 25 (NIPS 2012); Morgan Kaufmann Publishers, Inc.: San Francisco, CA, USA, 2012. [Google Scholar]
- Sawyer-Beaulieu, S.; Tam, E.; Hussein, A. Development of a Consumer-Oriented Metric for Measuring Corrosion on Vehicles—Phase II Report, Validation; Internal Research Report. 2017, p. 70. Available online: https://scholar.uwindsor.ca/cgi/viewcontent.cgi?referer=&httpsredir=1&article=6642&context=etd (accessed on 17 February 2022).
- Singh, H. Practical Machine Learning and Image Processing: For Facial Recognition, Object Detection, and Pattern Recognition Using Python; Apress: New York, NY, USA, 2019. [Google Scholar]
- Tsangouri, E.; Driessche, A.V.; Livitsanos, G.; Aggelis, D.G. Design, casting and fracture analysis of textile reinforced cementitious shells. Dev. Built Environ. 2020, 3, 100013. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. A review on the main challenges in automatic plant disease identification based on visible range images. Biosyst. Eng. J. 2016, 144, 52–60. [Google Scholar] [CrossRef]
- Neto, A.M.; Victorino, A.C.; Fantoni, I.; Zampieri, D.E.; Ferreira, J.V.; Lima, D.A. Image Processing Using Pearson’s Correlation Coefficient: Applications on Autonomous Robotics. In Proceedings of the 13th International Conference on Mobile Robots and Competitions (Robotica 2013), Lisbon, Portugal, 24–24 April 2013; pp. 14–19. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Image Name | Vehicle Age (in Years) | Camera Used | Treated/Untreated | Correlation Coefficient |
|---|---|---|---|---|
| IMG_0852.JPG | 6 | Canon | Treated | 0.85 |
| IMG_8370.JPG | 18 | Canon | Untreated | 0.58 |
| IMG_9313.JPG | 19 | Canon | Untreated | 0.79 |
| DSCN1568.JPG | 5 | Nikon | Treated | 0.46 |
| DSCN3857.JPG | 12 | Nikon | Treated | 0.97 |
| DSCN3731.JPG | 13 | Nikon | Untreated | 0.92 |
| DSCN1745.JPG | 17 | Nikon | Treated | 0.99 |
| IMG_0687.JPG | 23 | Canon | Treated | 0.83 |
| IMG_8055.JPG | 16 | Canon | Treated | 0.79 |
| DSCN3460.JPG | 16 | Nikon | Untreated | 0.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhonde, K.; Mirhassani, M.; Tam, E.; Sawyer-Beaulieu, S. Design of a Real-Time Corrosion Detection and Quantification Protocol for Automobiles. Materials 2022, 15, 3211. https://doi.org/10.3390/ma15093211
Dhonde K, Mirhassani M, Tam E, Sawyer-Beaulieu S. Design of a Real-Time Corrosion Detection and Quantification Protocol for Automobiles. Materials. 2022; 15(9):3211. https://doi.org/10.3390/ma15093211
Chicago/Turabian StyleDhonde, Kunj, Mitra Mirhassani, Edwin Tam, and Susan Sawyer-Beaulieu. 2022. "Design of a Real-Time Corrosion Detection and Quantification Protocol for Automobiles" Materials 15, no. 9: 3211. https://doi.org/10.3390/ma15093211