
Mechanical Design Optimization of Prosthetic Hand’s Fingers: Novel Solutions towards Weight Reduction




Abstract
:
1. Introduction
2. Materials and Methods
2.1. Design Targets
2.2. Computational Methods
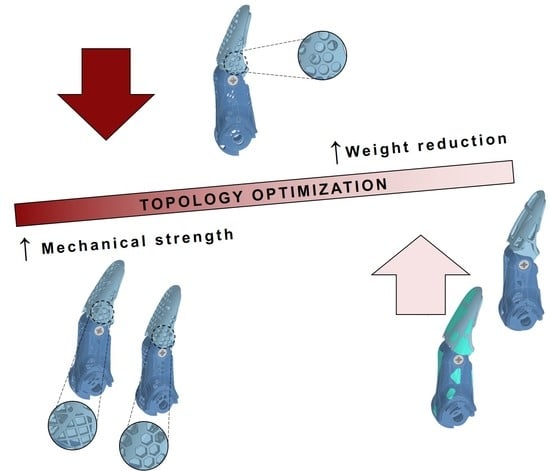
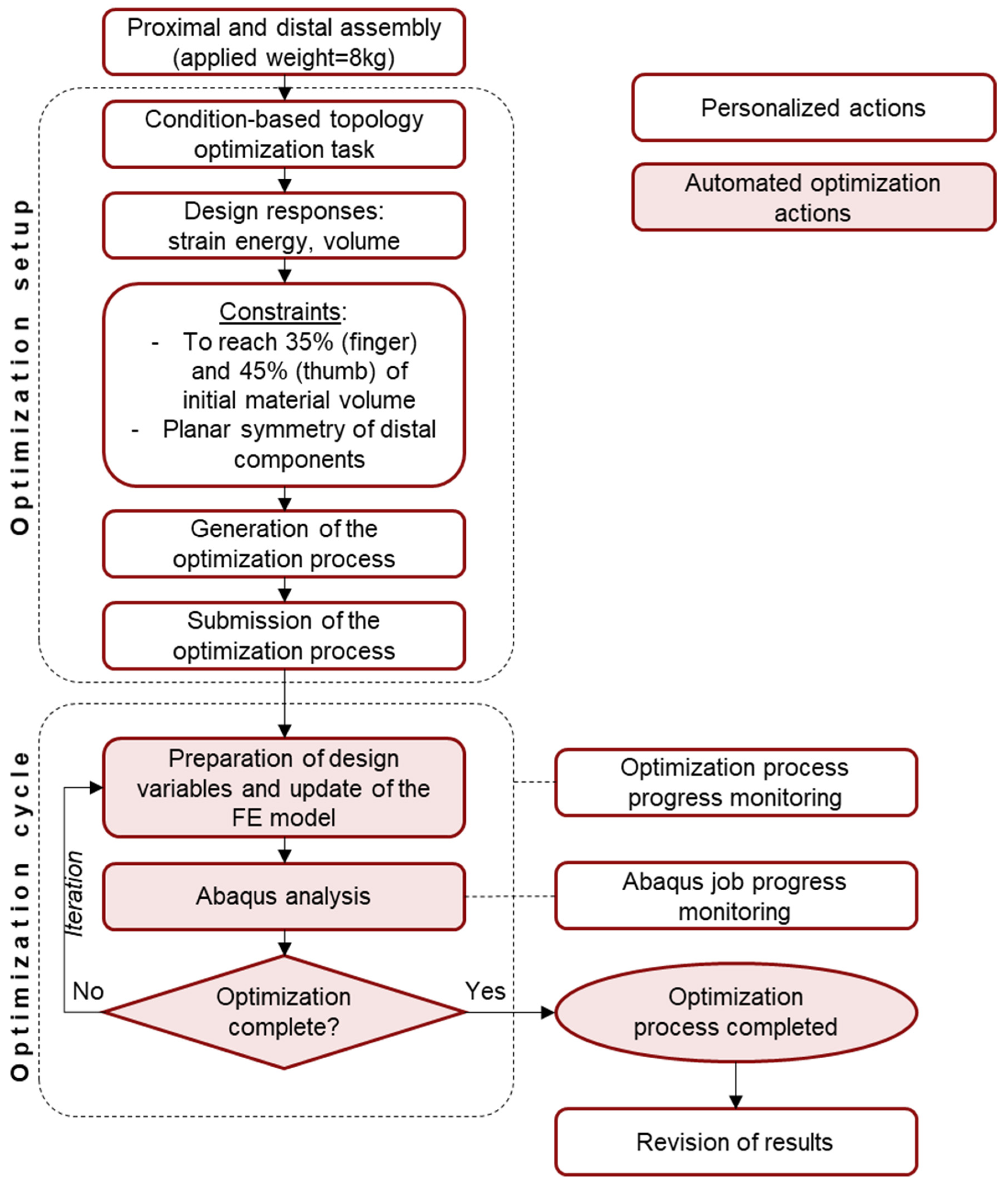
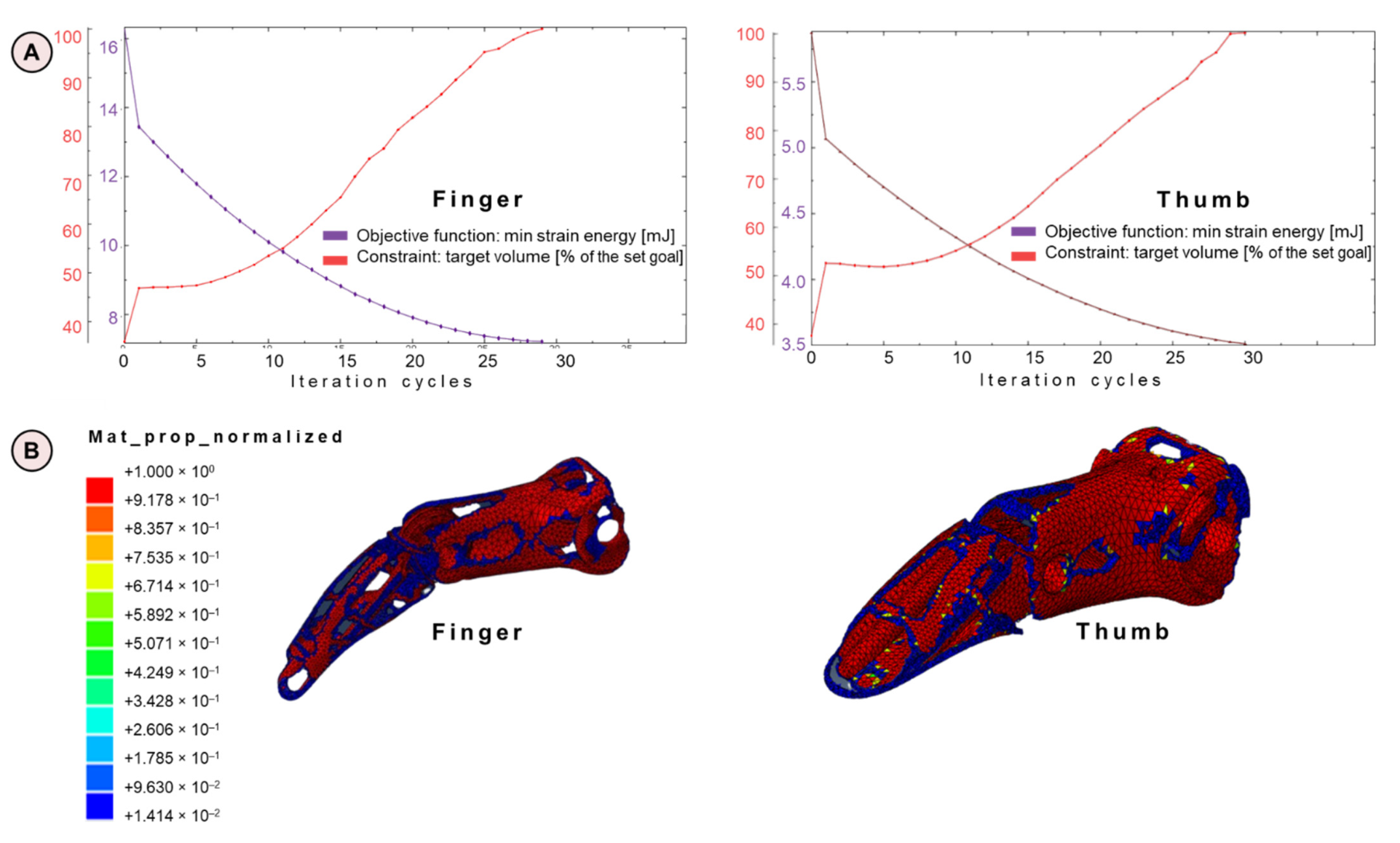
2.3. Topological Optimization
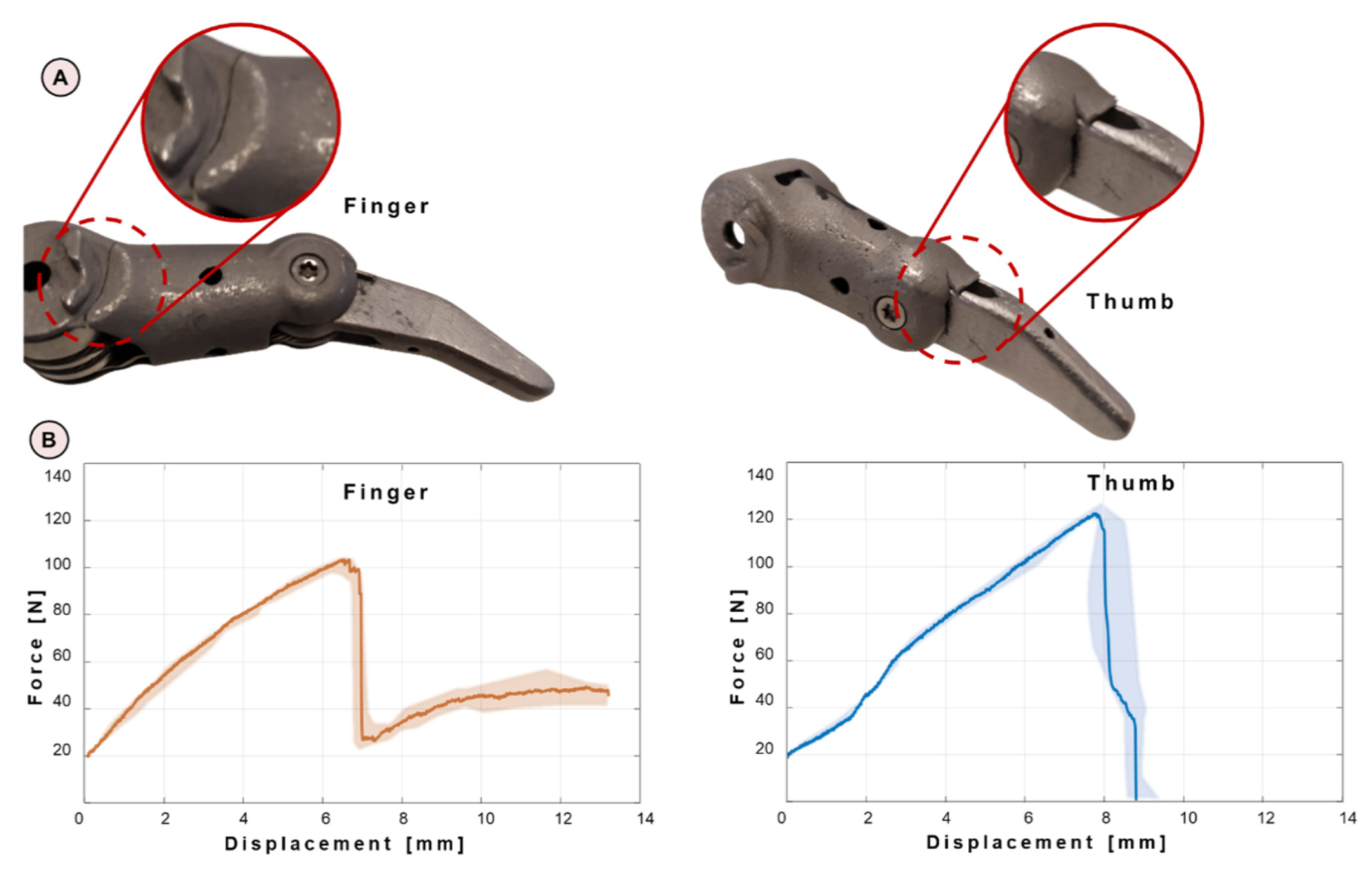
2.4. Experimental Campaign
3. Results
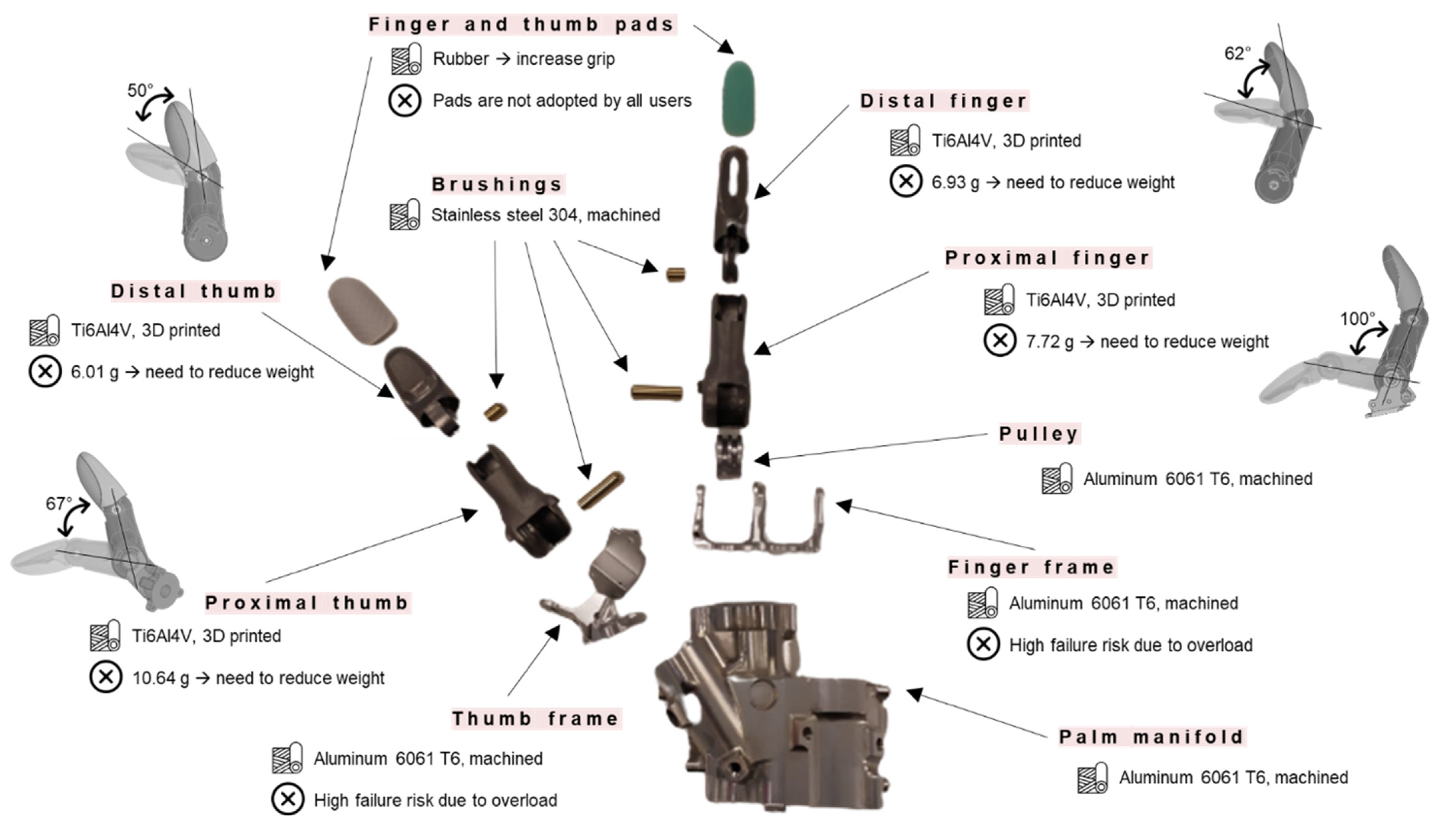
3.1. Analyses on Obsolete Components
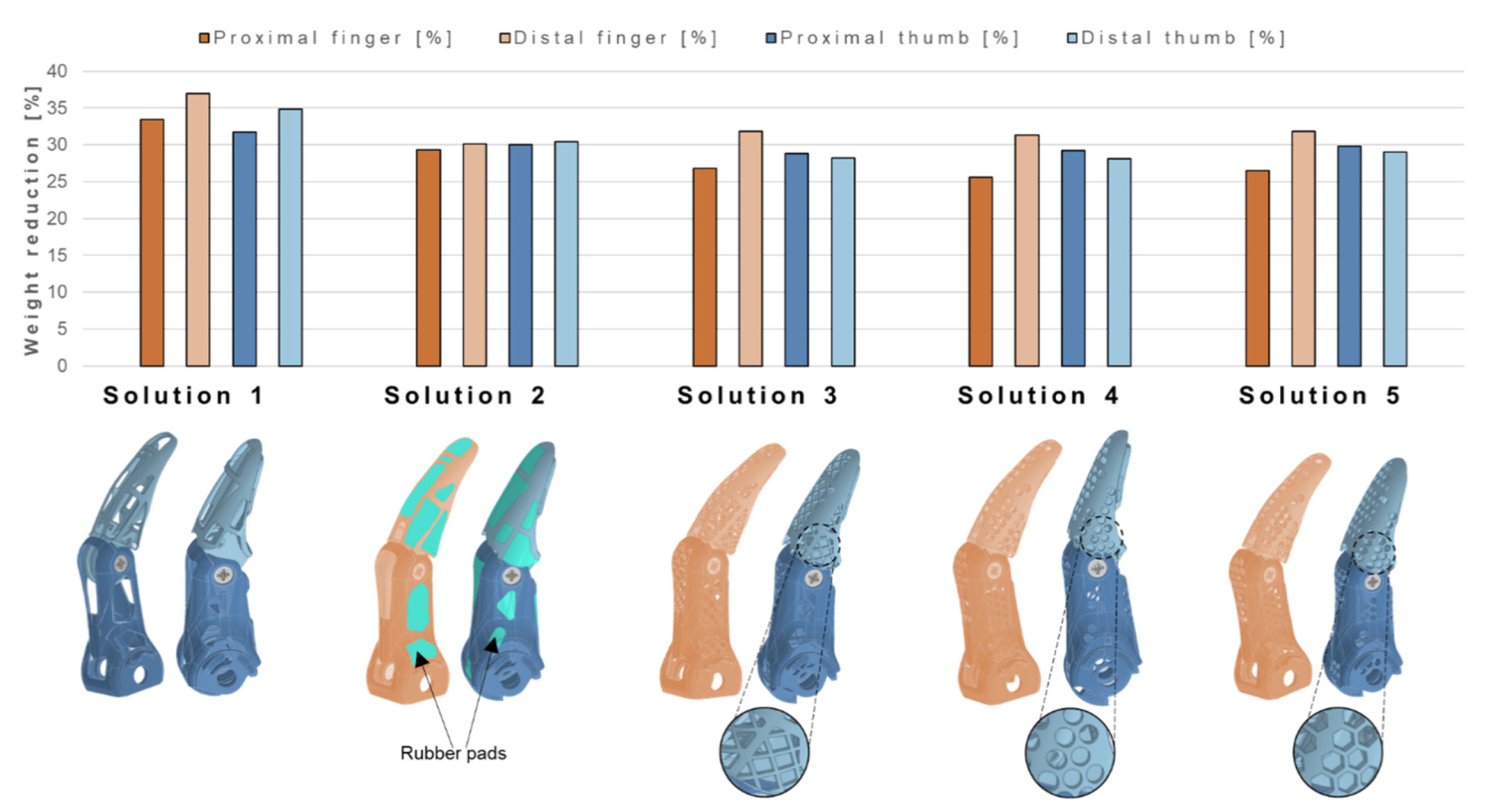
3.2. New Weight-Optimized Designs
4. Discussion
5. Conclusions
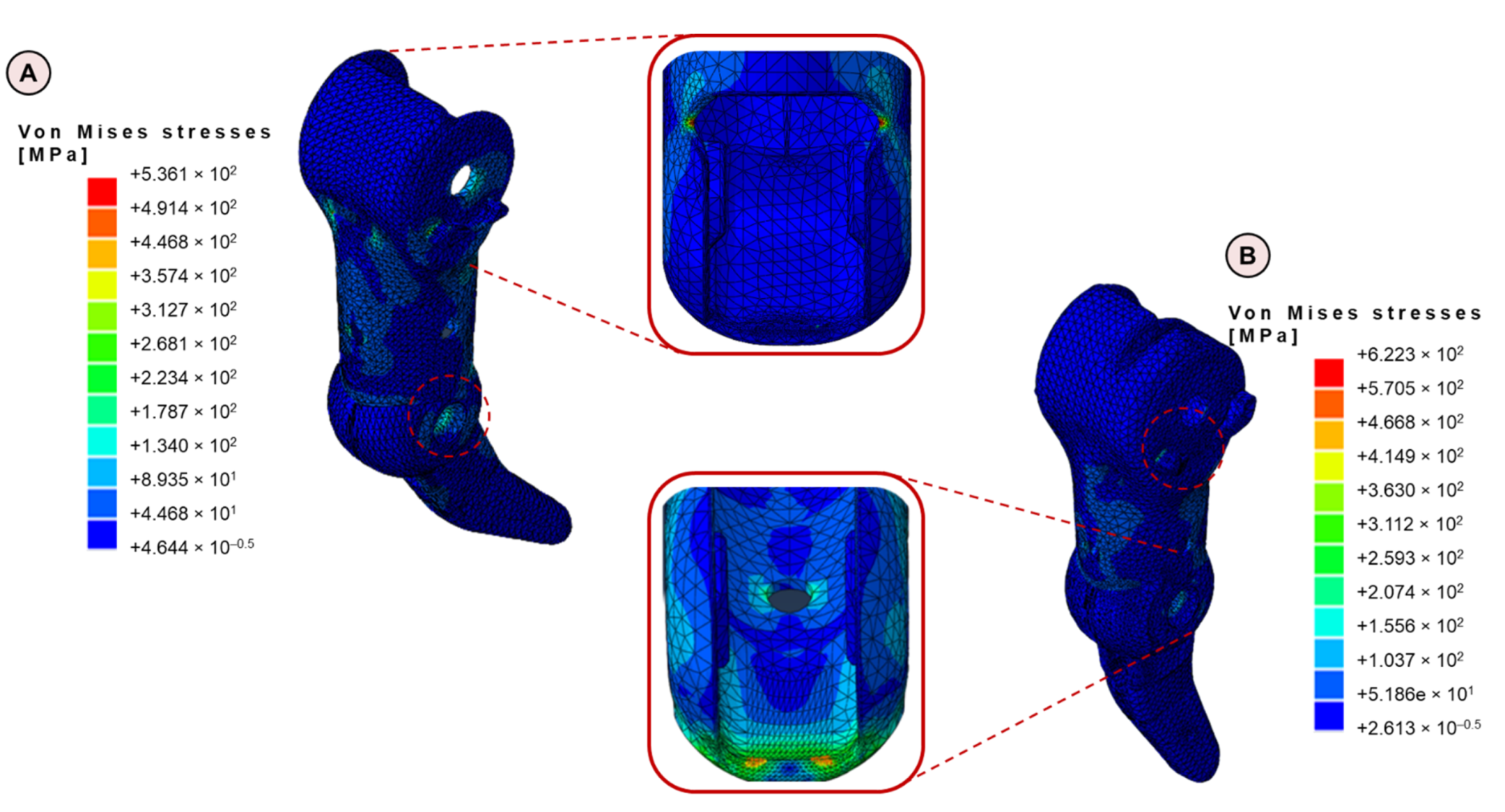
- Elastic–plastic FE models on obsolete components are implemented to locate the regions characterized by high stresses where material removal is prevented.
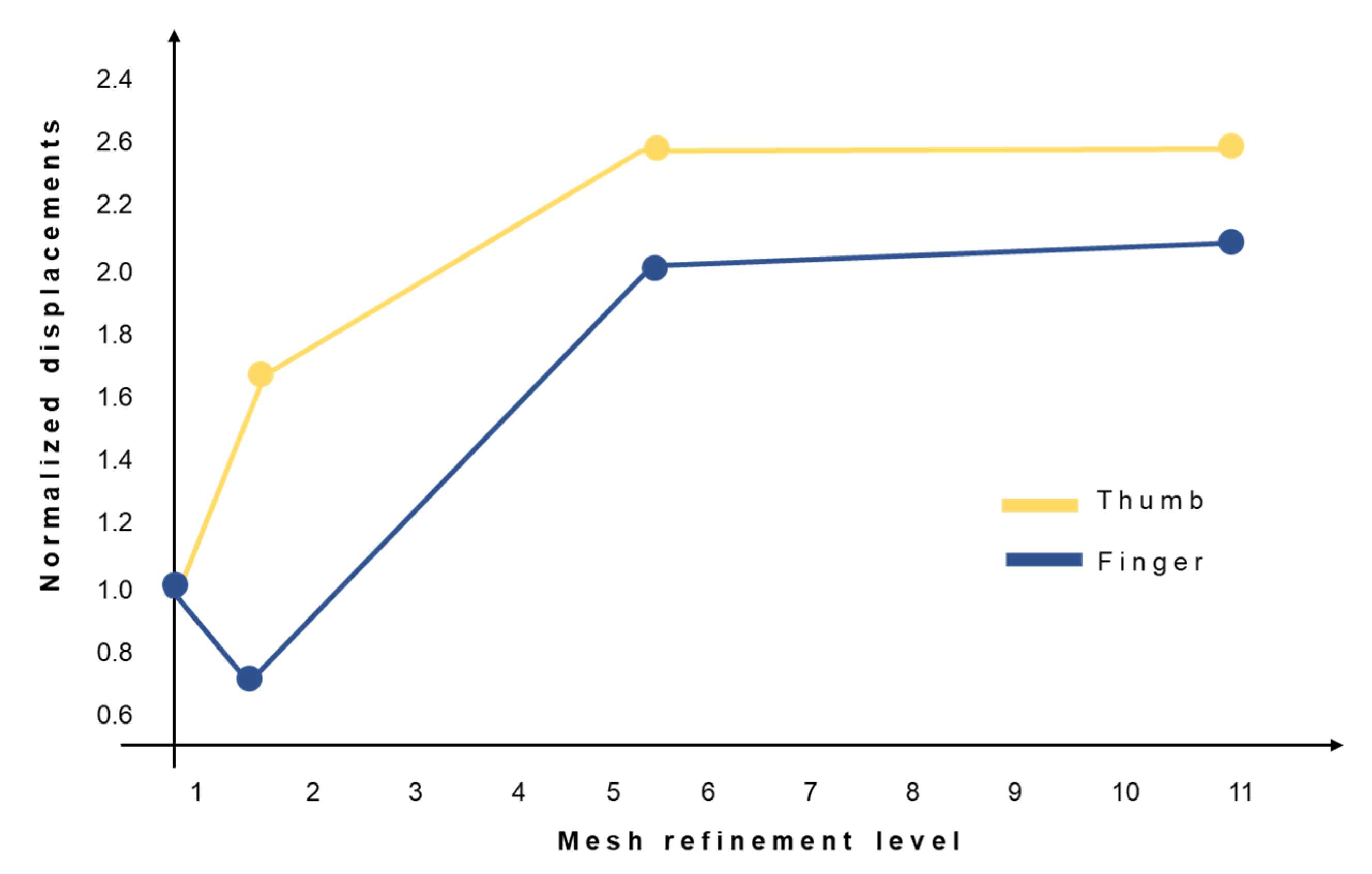
- FE models are validated by experimental tests on old prosthetic devices. The discrepancies in displacement outputs, even though not influencing the validity of the model, are accurately evaluated and liked to two aspects: numerical over-simplification of the assemblies and bending of the prosthesis during the experimental test.
- Topology optimization is exploited to identify material removal sites, keeping a specific target volume (35% of the initial volume for the finger, 45% for the thumb).
- Five novel designs are presented and critically compared for both finger and thumb. Solution 1 is the most extreme in terms of weight reduction, with a maximum of almost 37% in the distal finger. However, the presence of large voids that could lead to foreign matter intrusion discourages the manufacturer from Solution 1 further implementations.
- From the experimental tests on the prototypes, Solution 4 with the circular pattern results as the most interesting option in terms of weight reduction and adequate mechanical properties. The introduction of geometric patterns paves the way for novel lightweight designs applied to hand prostheses, whose features can be easily tuned and customized in accordance to users’ needs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Geary, M.; Gaston, R.G.; Loeffler, B. Surgical and technological advances in the management of upper limb amputees. Bone Jt. J. 2021, 103 B, 430–439. [Google Scholar] [CrossRef]
- Marchessault, J.A.; McKay, P.L.; Hammert, W.C. Management of upper limb amputations. J. Hand Surg. Am. 2011, 36, 1718–1726. [Google Scholar] [CrossRef] [PubMed]
- Zlotolow, D.A.; Kozin, S.H. Advances in Upper Extremity Prosthetics. Hand Clin. 2012, 28, 587–593. [Google Scholar] [CrossRef] [PubMed]
- Zuo, K.J.; Olson, J.L. The evolution of functional hand replacement: From iron prostheses to hand transplantation. Can. J. Plast. Surg. 2014, 22, 44–51. [Google Scholar] [CrossRef] [Green Version]
- Buccino, F.; Colombo, C.; Vergani, L.M. A review on multiscale bone damage: From the clinical to the research perspective. Materials 2021, 14, 1240. [Google Scholar] [CrossRef] [PubMed]
- Dillingham, T.R.; Pezzin, L.E.; MacKenzie, E.J. Limb amputation and limb deficiency: Epidemiology and recent trends in the United States. South. Med. J. 2002, 95, 875–883. [Google Scholar] [CrossRef] [PubMed]
- Meier, R.H.; Atkins, D.J. Functional Restoration of Adults and Children with Upper Extremity Amputation; Demos Medical Publishing: New York, NY, USA, 2004; 408p. [Google Scholar]
- Petri, R.P.; Aguila, E. The military upper extremity amputee. Phys. Med. Rehabil. Clin. N. Am. 2002, 13, 17–43. [Google Scholar] [CrossRef]
- Ostlie, K.; Lesjø, I.M.; Franklin, R.J.; Garfelt, B.; Skjeldal, O.H.; Magnus, P. Prosthesis use in adult acquired major upper-limb amputees: Patterns of wear, prosthetic skills and the actual use of prostheses in activities of daily life. Disabil. Rehabil. Assist. Technol. 2012, 7, 479–493. [Google Scholar] [CrossRef] [PubMed]
- Cancio, J.M.; Ikeda, A.J.; Barnicott, S.L.; Childers, W.L.; Alderete, J.F.; Goff, B.J. Upper Extremity Amputation and Prosthetics Care Across the Active Duty Military and Veteran Populations. Phys. Med. Rehabil. Clin. N. Am. 2019, 30, 73–87. [Google Scholar] [CrossRef] [PubMed]
- Østlie, K.; Lesjø, I.M.; Franklin, R.J.; Garfelt, B.; Skjeldal, O.H.; Magnus, P. Prosthesis rejection in acquired major upper-limb amputees: A population-based survey. Disabil. Rehabil. Assist. Technol. 2012, 7, 294–303. [Google Scholar] [CrossRef] [PubMed]
- Ostlie, K.; Franklin, R.J.; Skjeldal, O.H.; Skrondal, A.; Magnus, P. Musculoskeletal pain and overuse syndromes in adult acquired major upper-limb amputees. Arch. Phys. Med. Rehabil. 2011, 92, 1967–1973.e1. [Google Scholar] [CrossRef]
- Godfrey, S.B.; Piazza, C.; Felici, F.; Grioli, G.; Bicchi, A.; Catalano, M.G. Usability Assessment of Body Controlled Electric Hand Prostheses: A Pilot Study. Front. Neurorobot. 2021, 15, 683253. [Google Scholar] [CrossRef] [PubMed]
- Behrend, C.; Reizner, W.; Marchessault, J.A.; Hammert, W.C. Update on advances in upper extremity prosthetics. J. Hand Surg. Am. 2011, 36, 1711–1717. [Google Scholar] [CrossRef] [PubMed]
- Mcfarland, L.V.; Winkler, S.L.H.; Heinemann, A.W.; Jones, M.; Esquenazi, A. Unilateral upper-limb loss: Satisfaction and prosthetic-device use in veterans and servicemembers from Vietnam and OIF/OEF conflicts. J. Rehabil. Res. Dev. 2010, 47, 299–316. [Google Scholar] [CrossRef] [PubMed]
- Reiber, G.E.; Mcfarland, L.V.; Hubbard, S.; Maynard, C.; Blough, D.K.; Gambel, J.M.; Smith, D.G. Servicemembers and veterans with major traumatic limb loss from vietnam war and OIF/OEF conflicts: Survey methods, participants, and summary findings. J. Rehabil. Res. Dev. 2010, 47, 275–297. [Google Scholar] [CrossRef] [PubMed]
- Light, C.M.; Chappell, P.H.; Hudgins, B.; Engelhart, K. Intelligent multifunction myoelectric control of hand prostheses. J. Med. Eng. Technol. 2002, 26, 139–146. [Google Scholar] [CrossRef] [PubMed]
- Barrios-Muriel, J.; Romero-Sánchez, F.; Alonso-Sánchez, F.J.; Salgado, D.R. Advances in Orthotic and Prosthetic Manufacturing: A Technology Review. Materials 2020, 13, 295. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gylienė, V.; Eidukynas, V.; Gylys, G.; Murugesan, S. Numerical Analysis of Stapes Prosthesis Constraining in the Case of Otosclerosis. Materials 2021, 14, 7747. [Google Scholar] [CrossRef]
- Schultz, A.E.; Kuiken, T.A. Neural interfaces for control of upper limb prostheses: The state of the art and future possibilities. PM R 2011, 3, 55–67. [Google Scholar] [CrossRef] [PubMed]
- Burkett, B. Technology in Paralympic sport: Performance enhancement or essential for performance? Br. J. Sports Med. 2010, 44, 215–220. [Google Scholar] [CrossRef]
- Curran, S.A.; Hirons, R. Preparing our Paralympians: Research and development at Ossur, UK. Interview by Sarah A. Curran. Prosthet. Orthot. Int. 2012, 36, 366–369. [Google Scholar] [CrossRef] [PubMed]
- Dyer, B.; Woolley, H. Development of a high-performance transtibial cycling-specific prosthesis for the London 2012 Paralympic Games. Prosthet. Orthot. Int. 2017, 41, 498–502. [Google Scholar] [CrossRef] [PubMed]
- Curran, S.A.; Frossard, L. Biomechanical analyses of the performance of Paralympians: From foundation to elite level. Prosthet. Orthot. Int. 2012, 36, 380–395. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beck, O.N.; Taboga, P.; Grabowski, A.M. Reduced prosthetic stiffness lowers the metabolic cost of running for athletes with bilateral transtibial amputations. J. Appl. Physiol. 2017, 122, 976–984. [Google Scholar] [CrossRef] [PubMed]
- Morriën, F.; Taylor, M.J.D.; Hettinga, F.J. Biomechanics in paralympics: Implications for performance. Int. J. Sports Physiol. Perform. 2017, 12, 578–589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nolan, L. Carbon fibre prostheses and running in amputees: A review. Foot Ankle Surg. 2008, 14, 125–129. [Google Scholar] [CrossRef]
- Belter, J.T.; Segil, J.L.; Dollar, A.M.; Weir, R.F. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. J. Rehabil. Res. Dev. 2013, 50, 599–618. [Google Scholar] [CrossRef] [PubMed]
- Cipriani, C.; Zaccone, F.; Micera, S.; Carrozza, M.C. On the shared control of an EMG-controlled prosthetic hand: Analysis of user-prosthesis interaction. IEEE Trans. Robot. 2008, 24, 170–184. [Google Scholar] [CrossRef]
- Kejlaa, G.H. Consumer concerns and the functional value of prostheses to upper limb amputees. Prosthet. Orthot. Int. 1993, 17, 157–163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roeschlein, R.A.; Domholdt, E. Factors related to successful upper extremity prosthetic use. Prosthet. Orthot. Int. 1989, 13, 14–18. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burger, H. Marinček Upper limb prosthetic use in Slovenia. Prosthet. Orthot. Int. 1994, 18, 25–33. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fraser, C. A Survey of Users of Upper Limb Prostheses. Br. J. Occup. Ther. 1993, 56, 166–168. [Google Scholar] [CrossRef]
- Millstein, S.G.; Heger, H.; Hunter, G.A. Prosthetic use in adult upper limb amputees: A comparison of the body powered and electrically powered prostheses. Prosthet. Orthot. Int. 1986, 10, 27–34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kyberd, P.J.; Beard, D.J.; Morrison, J.D. The population of users of upper limb prostheses attending the Oxford limb fitting service. Prosthet. Orthot. Int. 1997, 21, 85–91. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pylatiuk, C.; Schulz, S.; Döderlein, L. Results of an internet survey of myoelectric prosthetic hand users. Prosthet. Orthot. Int. 2007, 31, 362–370. [Google Scholar] [CrossRef] [PubMed]
- Kyberd, P.J.; Hill, W. Survey of upper limb prosthesis users in Sweden, the United Kingdom and Canada. Prosthet. Orthot. Int. 2011, 35, 234–241. [Google Scholar] [CrossRef] [Green Version]
- Belter, J.T.; Dollar, A.M. Performance characteristics of anthropomorphic prosthetic hands. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar] [CrossRef]
- Calado, A.; Soares, F.; Matos, D. A Review on Commercially Available Anthropomorphic Myoelectric Prosthetic Hands, Pattern-Recognition-Based Microcontrollers and sEMG Sensors used for Prosthetic Control. In Proceedings of the 19th IEEE International Conference on Autonomous Robot Systems and Competitions, ICARSC 2019, Porto, Portugal, 24–26 April 2019. [Google Scholar]
- Jing, X.; Yong, X.; Jiang, Y.; Li, G.; Yokoi, H. Anthropomorphic prosthetic hand with combination of light weight and diversiform motions. Appl. Sci. 2019, 9, 4203. [Google Scholar] [CrossRef] [Green Version]
- Colombo, C.; Marchesin, E.G.; Vergani, L.; Boccafogli, E.; Verni, G. Design of an ankle prosthesis for swimming and walking. Procedia Eng. 2011, 10, 3503–3509. [Google Scholar] [CrossRef] [Green Version]
- Colombo, C.; Marchesin, E.G.; Vergani, L.; Boccafogli, E.; Verni, G. Study of an ankle prosthesis for children: Adaptation of ISO 10328 and experimental tests. Procedia Eng. 2011, 10, 3510–3517. [Google Scholar] [CrossRef] [Green Version]
- Zuniga, J.M.; Carson, A.M.; Peck, J.M.; Kalina, T.; Srivastava, R.M.; Peck, K. The development of a low-cost three-dimensional printed shoulder, arm, and hand prostheses for children. Prosthet. Orthot. Int. 2017, 41, 205–209. [Google Scholar] [CrossRef]
- Gretsch, K.F.; Lather, H.D.; Peddada, K.V.; Deeken, C.R.; Wall, L.B.; Goldfarb, C.A. Development of novel 3D-printed robotic prosthetic for transradial amputees. Prosthet. Orthot. Int. 2016, 40, 400–403. [Google Scholar] [CrossRef]
- Buccino, F.; Martinoia, G.; Vergani, L.M. Torsion—Resistant structures: A nature addressed solution. Materials 2021, 14, 5368. [Google Scholar] [CrossRef]
- MyHand—Hy5. Worlds 1st Hydraulic Hand Prosthesis. Available online: https://www.hy5.no/myhand (accessed on 8 March 2022).
- Nakshatrala, K.B.; Mudunuru, M.K.; Valocchi, A.J. A numerical framework for diffusion-controlled bimolecular-reactive systems to enforce maximum principles and the non-negative constraint. J. Comput. Phys. 2013, 253, 278–307. [Google Scholar] [CrossRef] [Green Version]
- Mudunuru, M.K.; Nakshatrala, K.B. On enforcing maximum principles and achieving element-wise species balance for advection–diffusion–reaction equations under the finite element method. J. Comput. Phys. 2016, 305, 448–493. [Google Scholar] [CrossRef] [Green Version]
- About Structural Optimization. Available online: https://abaqus-docs.mit.edu/2017/English/SIMACAEANLRefMap/simaanl-c-optover.htm (accessed on 8 March 2022).
- MySkin—Hy5. Worlds 1st Hydraulic Hand Prosthesis. Available online: https://www.hy5.no/myskin (accessed on 8 March 2022).
- Du Plessis, A.; Yadroitsava, I.; Yadroitsev, I. Ti6Al4V lightweight lattice structures manufactured by laser powder bed fusion for load-bearing applications. Opt. Laser Technol. 2018, 108, 521–528. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Potentialities | Critical Issues | |
|---|---|---|
| Solution 1 | Maximum weight reduction (35% finger, 33% thumb) among presented solutions | Children’s fingers or small objects can get entangled Dirt and dust can penetrate the components Maximum strength reduction |
| Solution 1 + Film | Internal mechanisms are sealed from the outside | Extra thermoforming process to be added to production Puncture or wear of the film in everyday use Strength reduction analogous to Solution 1 |
| Solution 2 | Internal mechanisms are sealed from the outside Improved grip thanks to rubber pads | Great number of pads to be glued on the components (assembly time increased, difficulties in disassembly) Pads can detach during everyday use Strength reduction analogous to Solution 1 |
| Solution 3 | Improved strength with respect to Solution 1 | Dirt and dust can get inside |
| Solution 4 | Lowest strength reduction | Dirt and dust can get inside |
| Solution 5 | Improved strength with respect to Solution 1 (limited increase) | Dirt and dust can get inside |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buccino, F.; Bunt, A.; Lazell, A.; Vergani, L.M. Mechanical Design Optimization of Prosthetic Hand’s Fingers: Novel Solutions towards Weight Reduction. Materials 2022, 15, 2456. https://doi.org/10.3390/ma15072456
Buccino F, Bunt A, Lazell A, Vergani LM. Mechanical Design Optimization of Prosthetic Hand’s Fingers: Novel Solutions towards Weight Reduction. Materials. 2022; 15(7):2456. https://doi.org/10.3390/ma15072456
Chicago/Turabian StyleBuccino, Federica, Alessandro Bunt, Alex Lazell, and Laura Maria Vergani. 2022. "Mechanical Design Optimization of Prosthetic Hand’s Fingers: Novel Solutions towards Weight Reduction" Materials 15, no. 7: 2456. https://doi.org/10.3390/ma15072456