
A Universal Method for Modeling and Characterizing Non-Circular Packing Systems Based on n-Point Correlation Functions

Abstract
:1. Introduction
1.1. Packing of Particulate Model
1.2. Overlap Determination for Non-Circular Particles
1.3. Characterization of Packs
1.4. A Universal Method for Modeling and Characterizing
2. Method Description
2.1. Impenetrable Packing Model
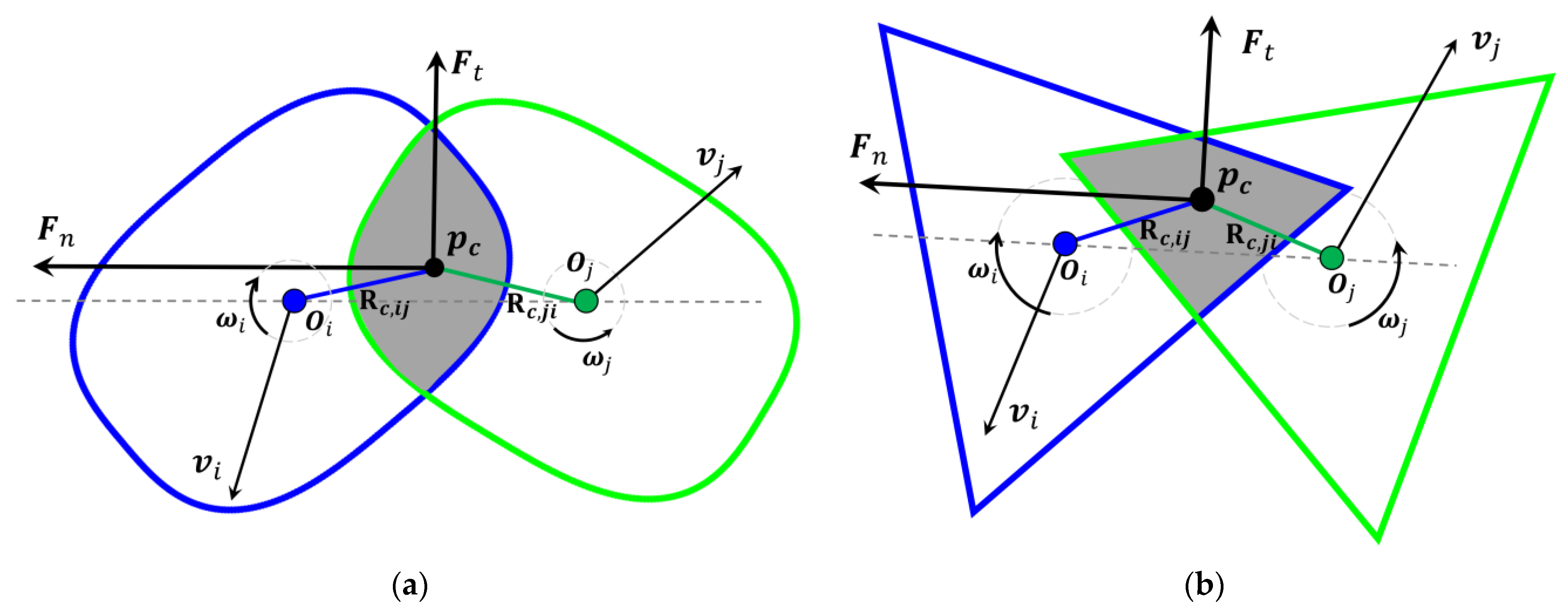
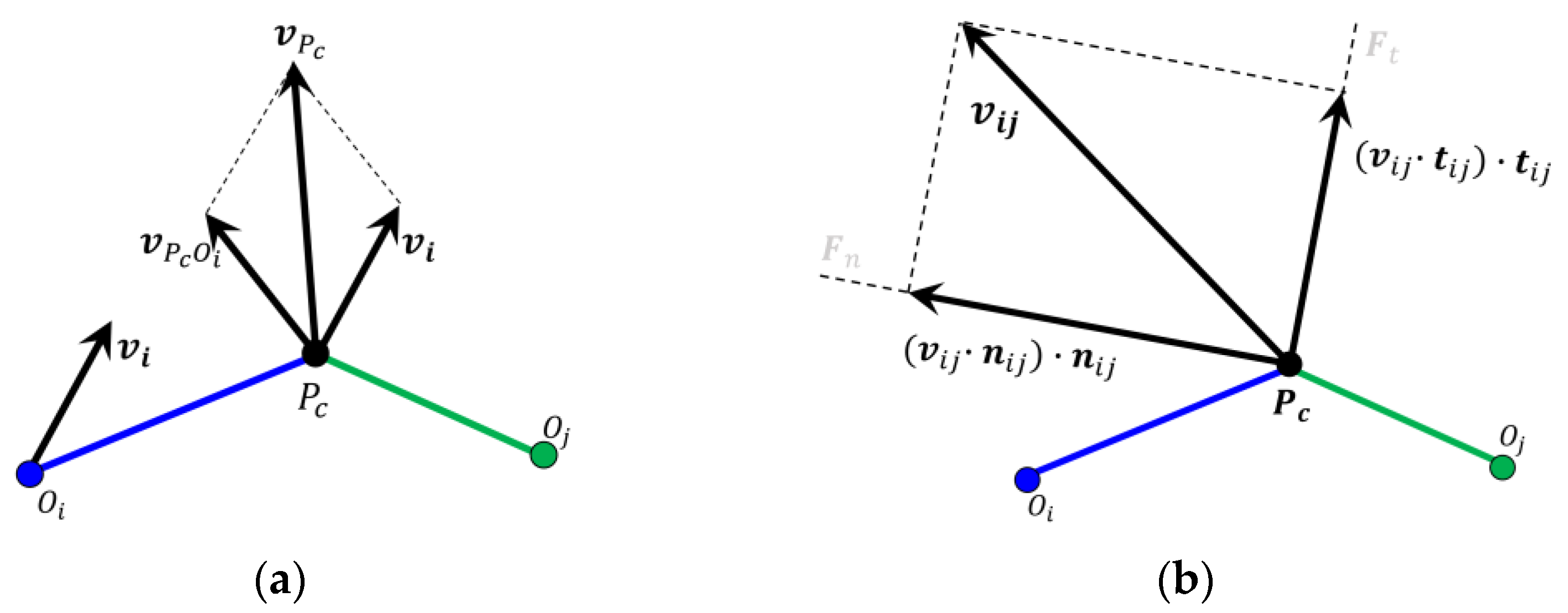
2.1.1. Governing Equations
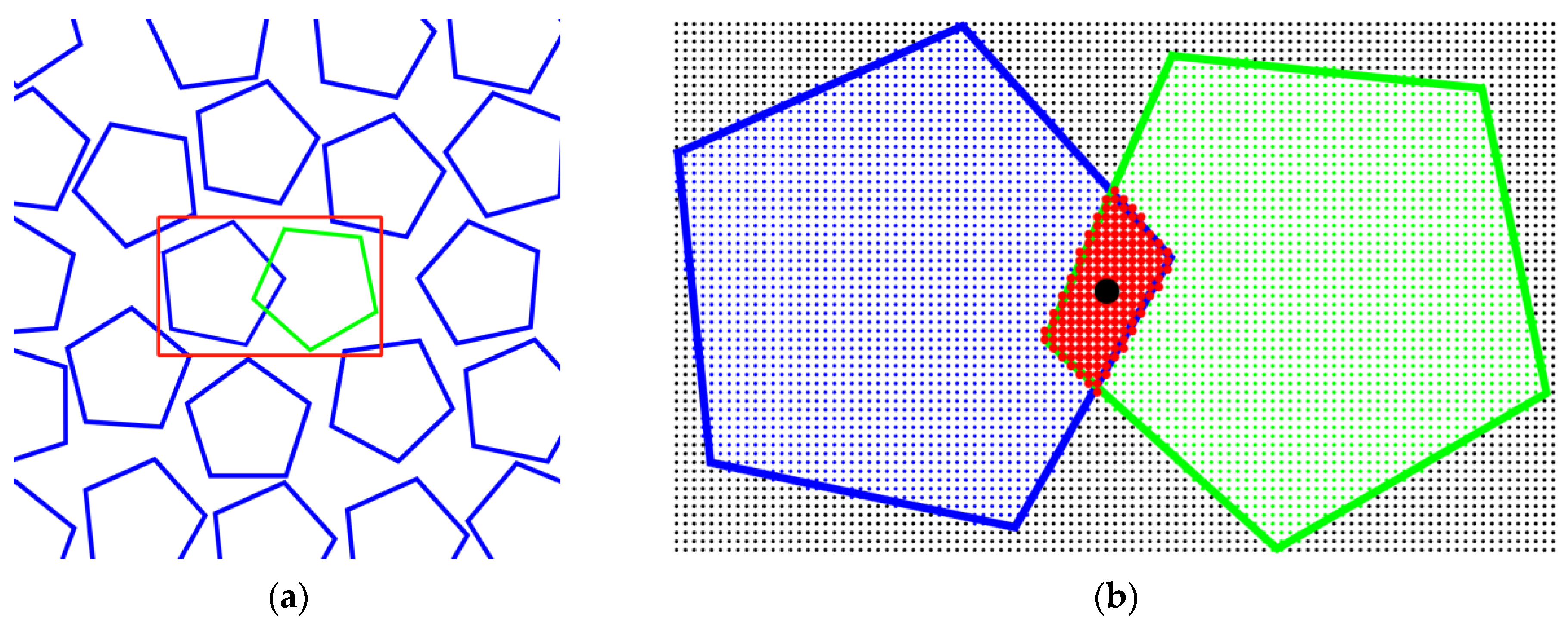
2.1.2. Determination of Overlap Area
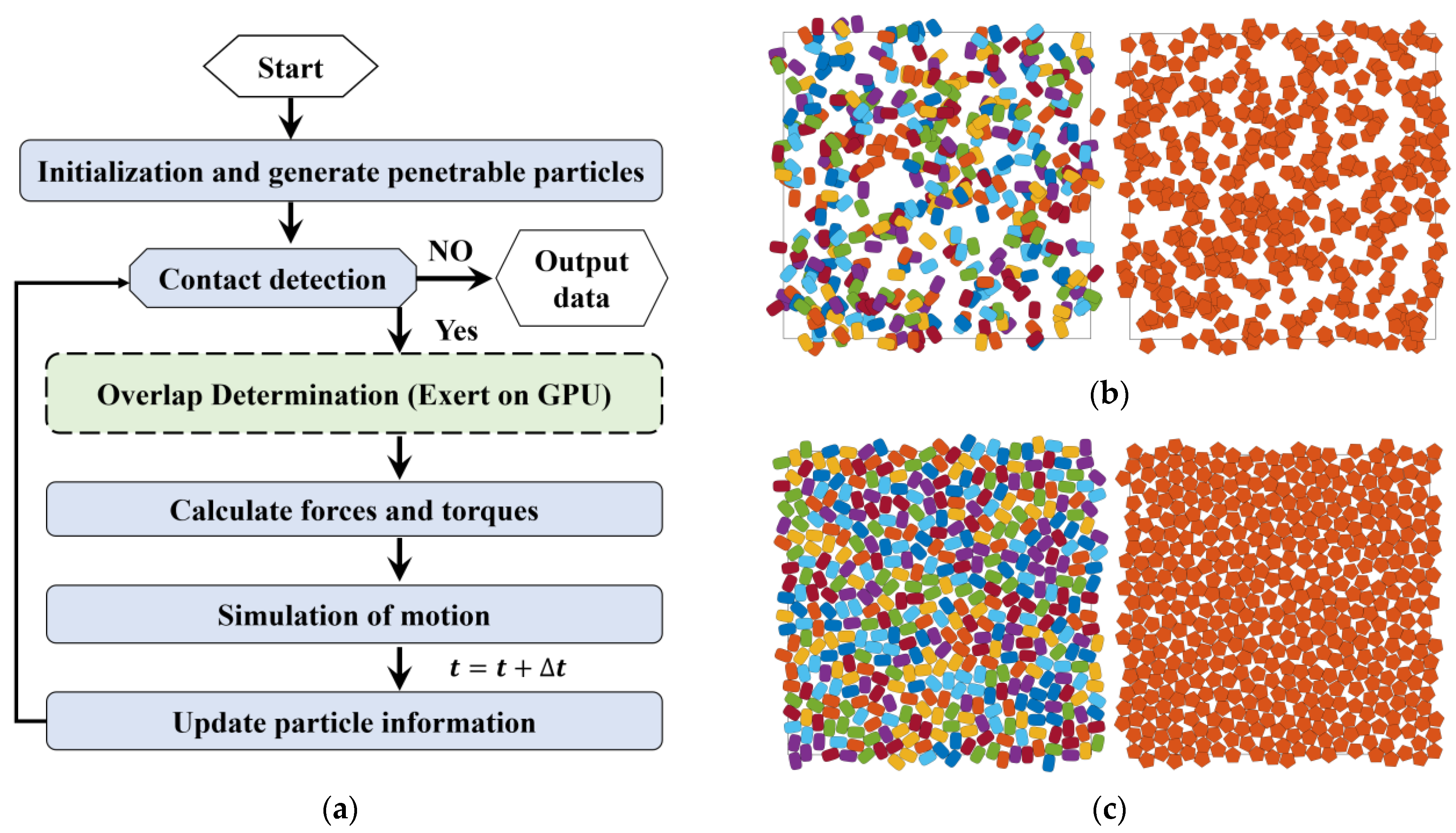
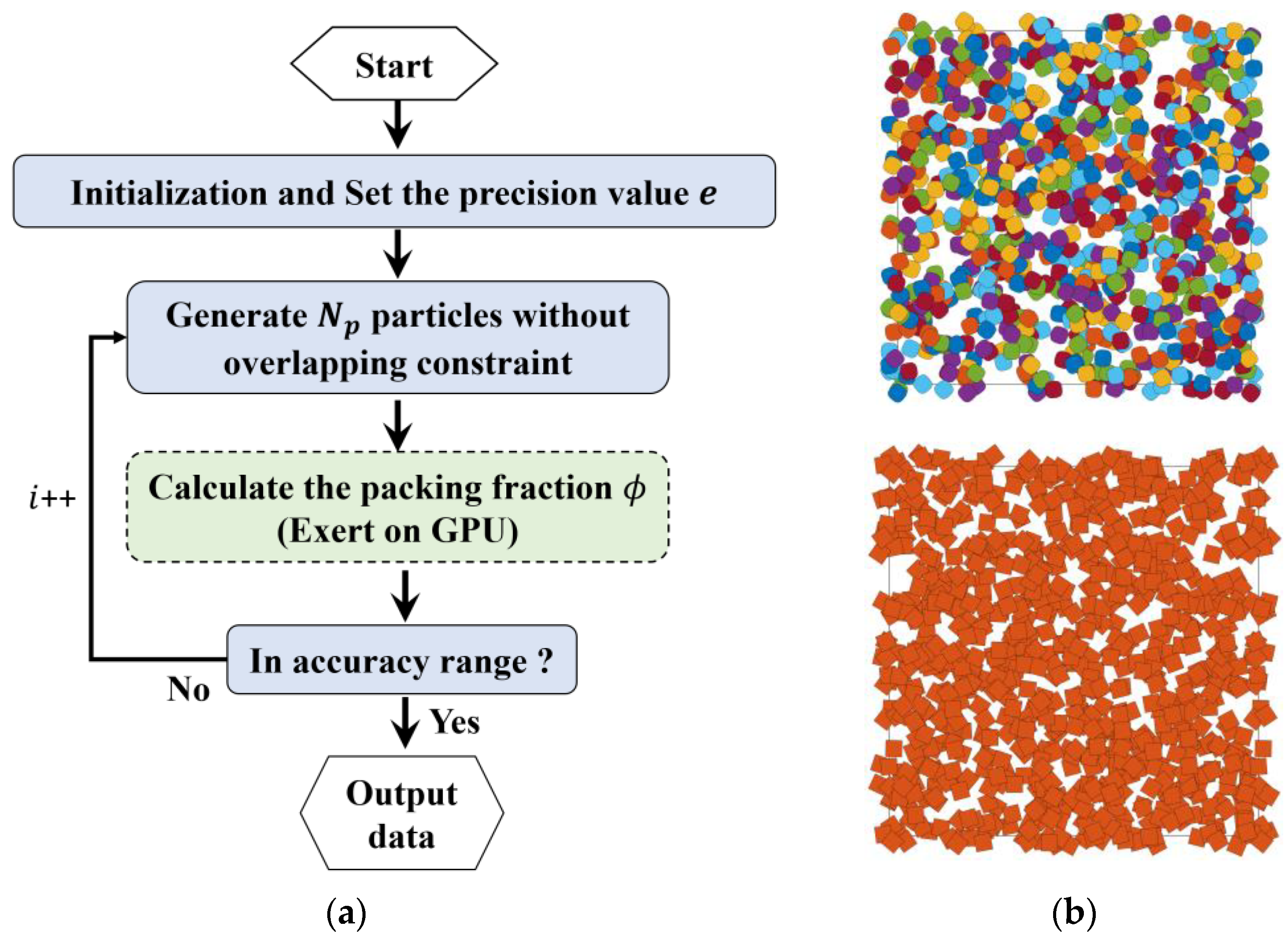
2.1.3. Dynamic Packing Scheme
2.2. Penetrable Packing Model
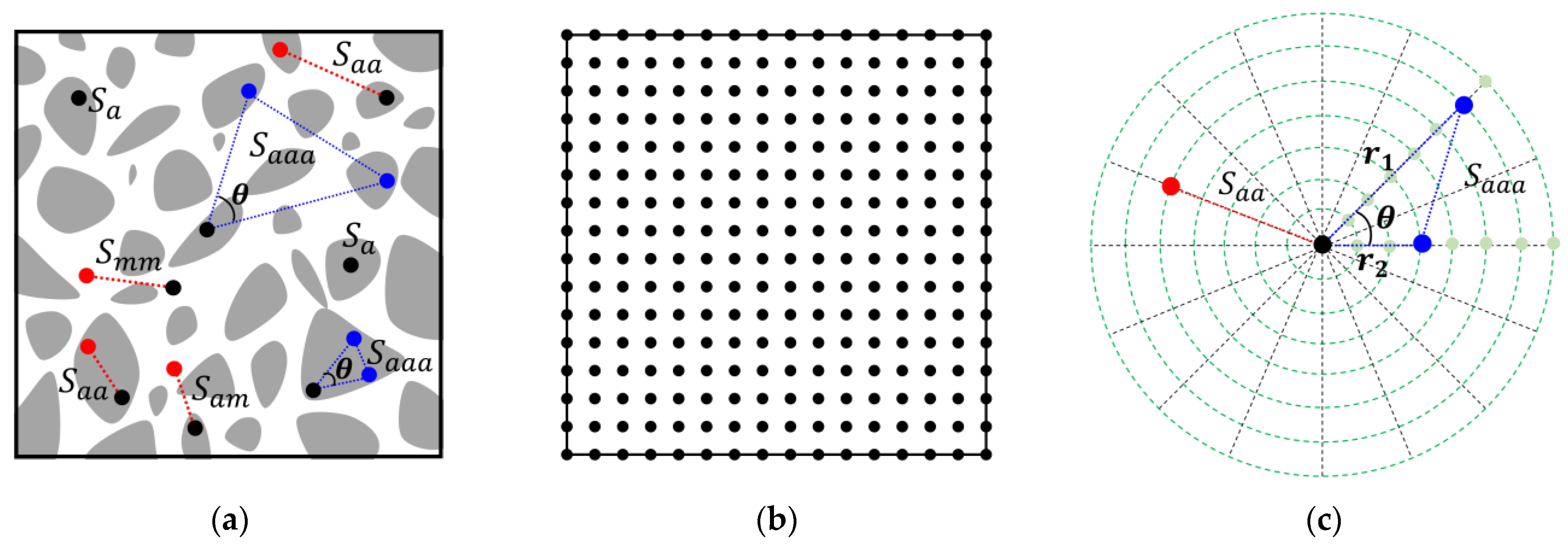
3. n-Point Correlation Functions
4. Discussion
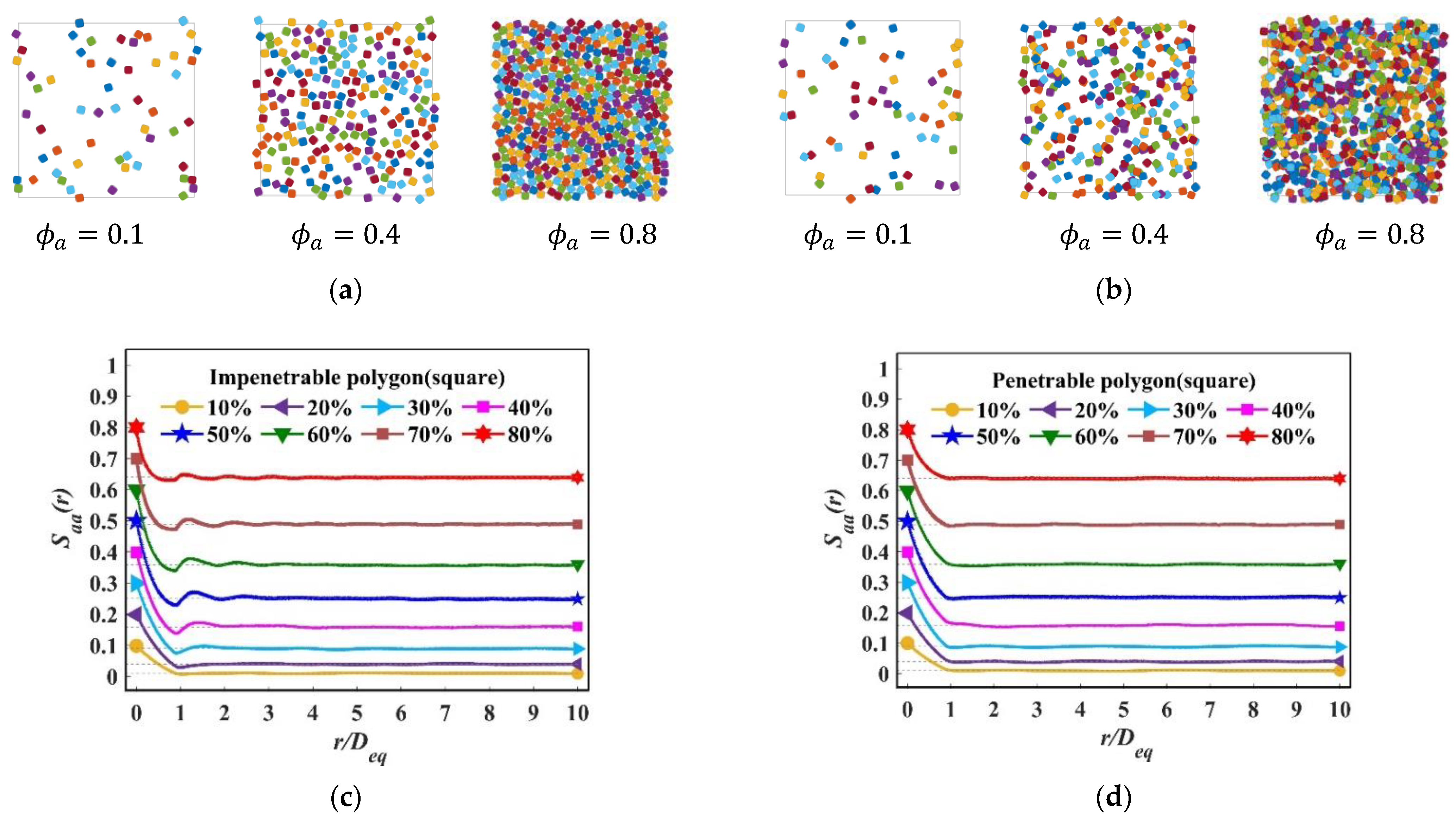
4.1. Packing Fraction
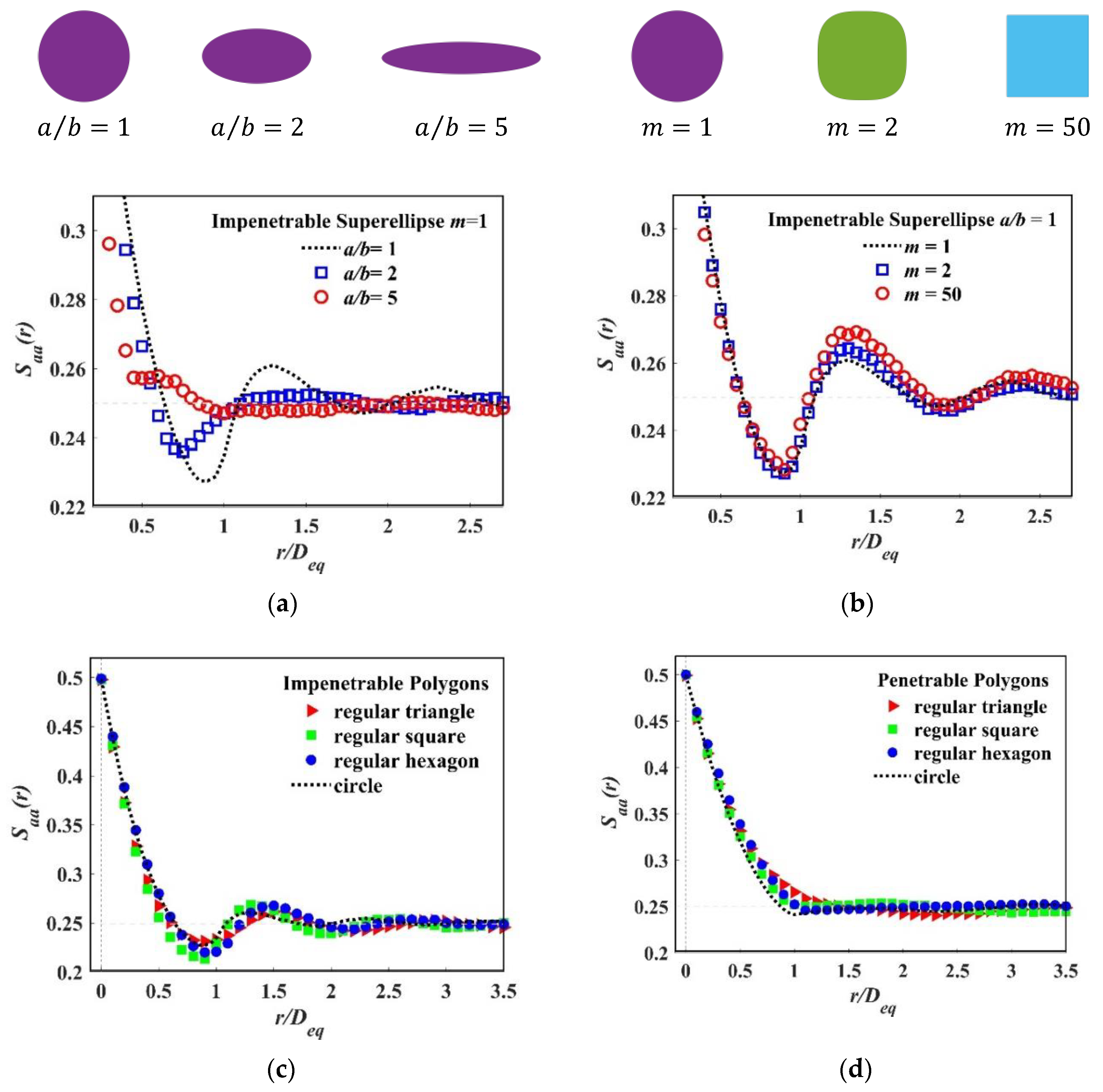
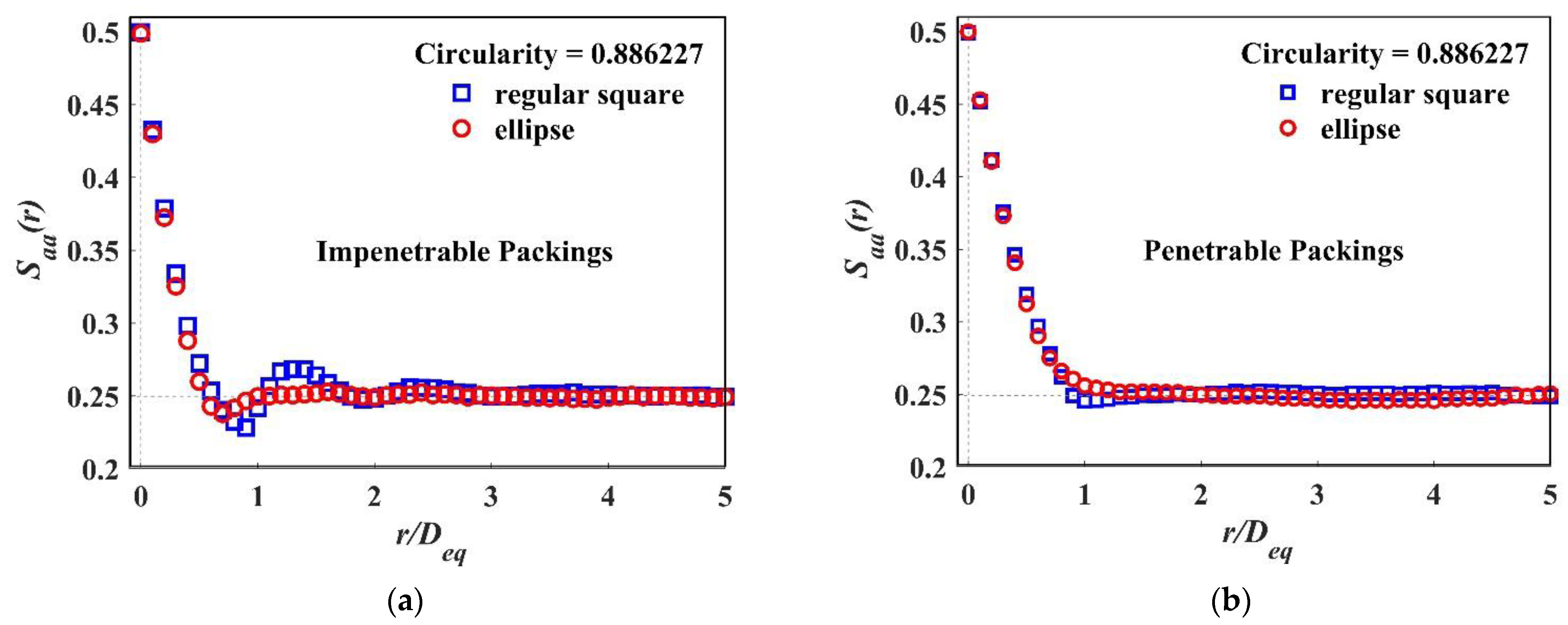
4.2. Particle Shape
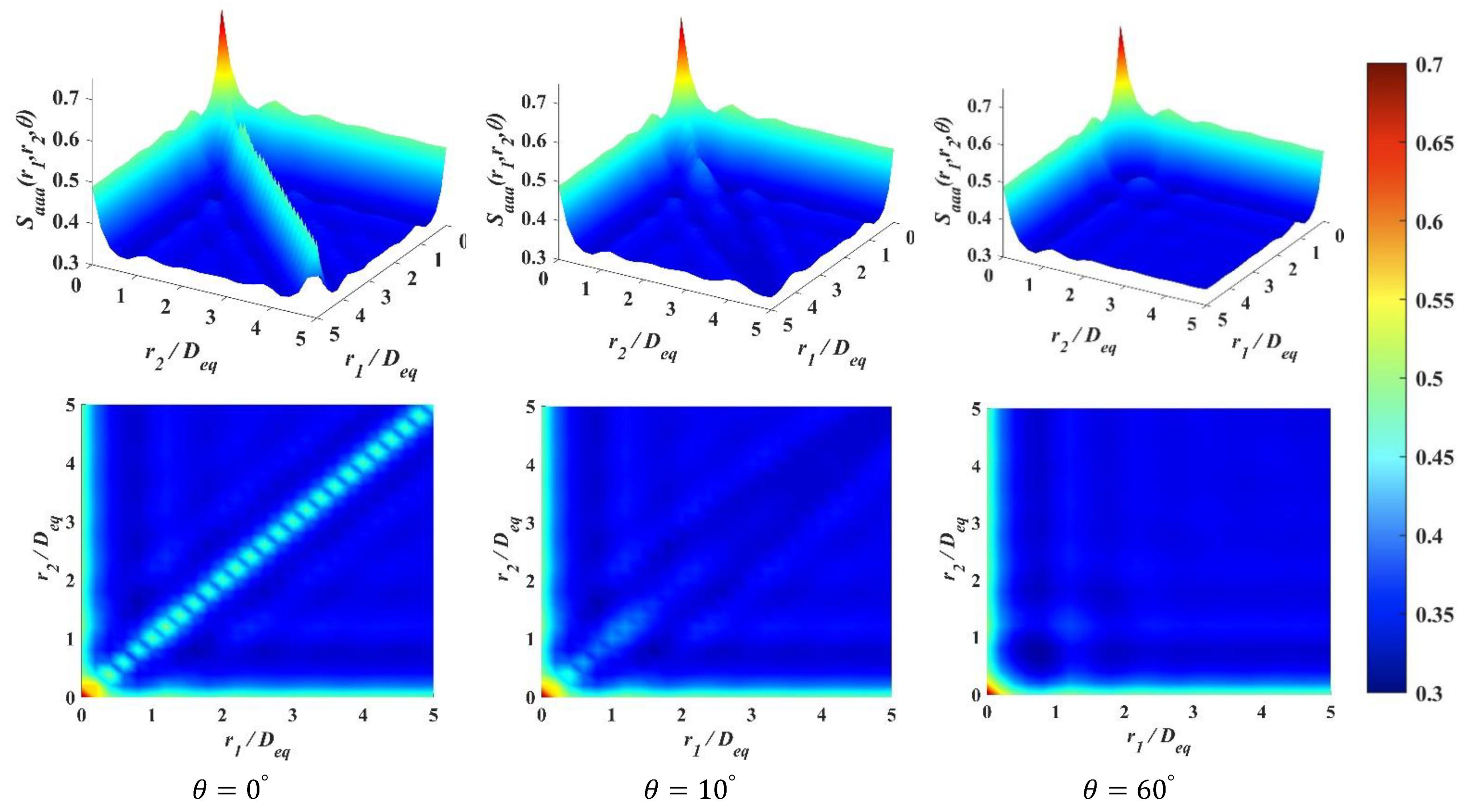
4.3. Three-Point Correlation Function
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Torquato, S.; Kim, J. Nonlocal effective electromagnetic wave characteristics of composite media: Beyond the quasistatic regime. Phys. Rev. X 2021, 11, 021002. [Google Scholar] [CrossRef]
- Vel, S.S.; Batra, R. Exact solution for thermoelastic deformations of functionally graded thick rectangular plates. AIAA J. 2002, 40, 1421–1433. [Google Scholar] [CrossRef]
- Wong, H.; Zobel, M.; Buenfeld, N.; Zimmerman, R. Influence of the interfacial transition zone and microcracking on the diffusivity, permeability and sorptivity of cement-based materials after drying. Mag. Concr. Res. 2009, 61, 571–589. [Google Scholar] [CrossRef]
- Li, M.; Chen, H.; Li, X.; Liu, L.; Lin, J. Permeability of granular media considering the effect of grain composition on tortuosity. Int. J. Eng. Sci. 2022, 174, 103658. [Google Scholar] [CrossRef]
- Li, M.; Chen, H.; Lin, J. Numerical study for the percolation threshold and transport properties of porous composites comprising non-centrosymmetrical superovoidal pores. Comput. Methods Appl. Mech. Eng. 2020, 361, 112815. [Google Scholar] [CrossRef]
- Li, M.; Chen, H.; Lin, J. Efficient measurement of the percolation threshold for random systems of congruent overlapping ovoids. Powder Technol. 2020, 360, 598–607. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, K.; Zhang, Y.; Jiang, J. Packing Fraction, Tortuosity, and Permeability of Granular-Porous Media with Densely Packed Spheroidal Particles: Monodisperse and Polydisperse Systems. Water Resour. Res. 2022, 58, e2021WR031433. [Google Scholar] [CrossRef]
- Lin, J.; Zhang, W.; Chen, H.; Zhang, R.; Liu, L. Effect of pore characteristic on the percolation threshold and diffusivity of porous media comprising overlapping concave-shaped pores. Int. J. Heat Mass Transf. 2019, 138, 1333–1345. [Google Scholar] [CrossRef]
- Hinrichsen, E.L.; Feder, J. Geometry of random sequential adsorption. J. Stat. Phys. 1986, 44, 793–827. [Google Scholar] [CrossRef]
- Talbot, J.; Schaaf, P.; Tarjus, G. Random sequential addition of hard spheres. Mol. Phys. 1991, 72, 1397–1406. [Google Scholar] [CrossRef]
- Pankratov, A.; Romanova, T.; Litvinchev, I. Packing ellipses in an optimized rectangular container. Wirel. Netw. 2020, 26, 4869–4879. [Google Scholar] [CrossRef]
- Litvinchev, I.; Infante, L.; Ozuna, L. Packing circular-like objects in a rectangular container. J. Comput. Syst. Sci. Int. 2015, 54, 259–267. [Google Scholar] [CrossRef]
- Romanova, T.; Litvinchev, I.; Pankratov, A. Packing ellipsoids in an optimized cylinder. Eur. J. Oper. Res. 2020, 285, 429–443. [Google Scholar] [CrossRef]
- Toledo, F.M.; Carravilla, M.A.; Ribeiro, C.; Oliveira, J.F.; Gomes, A.M. The dotted-board model: A new MIP model for nesting irregular shapes. Int. J. Prod. Econ. 2013, 145, 478–487. [Google Scholar] [CrossRef]
- Cieśla, M.; Barbasz, J. Random packing of regular polygons and star polygons on a flat two-dimensional surface. Phys. Rev. E 2014, 90, 022402. [Google Scholar] [CrossRef]
- Romanova, T.; Pankratov, O.; Litvinchev, I.; Stetsyuk, P.; Lykhovyd, O.; Marmolejo-Saucedo, J.A.; Vasant, P. Balanced Circular Packing Problems with Distance Constraints. Computation 2022, 10, 113. [Google Scholar] [CrossRef]
- Romanova, T.; Bennell, J.; Stoyan, Y.; Pankratov, A. Packing of concave polyhedra with continuous rotations using nonlinear optimization. Eur. J. Oper. Res. 2018, 268, 37–53. [Google Scholar] [CrossRef]
- Romanova, T.; Stoyan, Y.; Pankratov, A.; Litvinchev, I.; Avramov, K.; Chernobryvko, M.; Yanchevskyi, I.; Mozgova, I.; Bennell, J. Optimal layout of ellipses and its application for additive manufacturing. Int. J. Prod. Res. 2021, 59, 560–575. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Frenkel, D.; Smit, B. Understanding Molecular Simulation: From Algorithms to Applications; Elsevier: Amsterdam, The Netherlands, 2001; Volume 1. [Google Scholar]
- Zhao, J.; Li, S.; Jin, W.; Zhou, X. Shape effects on the random-packing density of tetrahedral particles. Phys. Rev. E 2012, 86, 031307. [Google Scholar] [CrossRef]
- Xu, W.; Jiao, Y. Theoretical framework for percolation threshold, tortuosity and transport properties of porous materials containing 3D non-spherical pores. Int. J. Eng. Sci. 2019, 134, 31–46. [Google Scholar] [CrossRef]
- Lin, J.; Chen, H. Effect of particle morphologies on the percolation of particulate porous media: A study of superballs. Powder Technol. 2018, 335, 388–400. [Google Scholar] [CrossRef]
- Li, M.; Chen, H.; Liu, L.; Lin, J.; Ullah, K. Permeability of concrete considering the synergetic effect of crack’s shape- and size-polydispersities on the percolation. Constr. Build. Mater. 2022, 315, 125684. [Google Scholar] [CrossRef]
- Zhong, W.; Yu, A.; Liu, X.; Tong, Z.; Zhang, H. DEM/CFD-DEM Modelling of Non-spherical Particulate Systems: Theoretical Developments and Applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Lu, G.; Third, J.; Müller, C. Discrete element models for non-spherical particle systems: From theoretical developments to applications. Chem. Eng. Sci. 2015, 127, 425–465. [Google Scholar] [CrossRef]
- Lin, J.; Chen, H.; Xu, W. Geometrical percolation threshold of congruent cuboidlike particles in overlapping particle systems. Phys. Rev. E 2018, 98, 012134. [Google Scholar] [CrossRef]
- Akenine-Möllser, T. Fast 3D Triangle-Box Overlap Testing. J. Graph. Tools 2001, 6, 29–33. [Google Scholar] [CrossRef]
- Rothenburg, L.; Bathurst, R.J. Numerical simulation of idealized granular assemblies with plane elliptical particles. Comput. Geotech. 1991, 11, 315–329. [Google Scholar] [CrossRef]
- Ting, J.M. An ellipse-based micromechanical model for angular granular materials. In Proceedings of the ASCE Eight Engineering Mechanics Conference on Mechanics Computing, Columbus, OH, USA, 20–22 May 1991. [Google Scholar]
- Ting, J.M. A robust algorithm for ellipse-based discrete element modelling of granular materials. Comput. Geotech. 1992, 13, 175–186. [Google Scholar] [CrossRef]
- Ng, T.-T. Numerical simulations of granular soil using elliptical particles. Comput. Geotech. 1994, 16, 153–169. [Google Scholar] [CrossRef]
- Lu, G.; Third, J.; Müller, C. Critical assessment of two approaches for evaluating contacts between super-quadric shaped particles in DEM simulations. Chem. Eng. Sci. 2012, 78, 226–235. [Google Scholar] [CrossRef]
- Lin, X.; Ng, T.-T. Contact detection algorithms for three-dimensional ellipsoids in discrete element modelling. Int. J. Numer. Anal. Methods Géoméch. 1995, 19, 653–659. [Google Scholar] [CrossRef]
- Wellmann, C.; Lillie, C.; Wriggers, P. A contact detection algorithm for superellipsoids based on the common-normal concept. Eng. Comput. 2008, 25, 432–442. [Google Scholar] [CrossRef]
- D’Addetta, G.A.; Kun, F.; Ramm, E. On the application of a discrete model to the fracture process of cohesive granular materials. Granul. Matter 2002, 4, 77–90. [Google Scholar] [CrossRef]
- Feng, Y.; Owen, D. A 2D polygon/polygon contact model: Algorithmic aspects. Eng. Comput. 2004, 21, 265–277. [Google Scholar] [CrossRef]
- Eliáš, J. Simulation of railway ballast using crushable polyhedral particles. Powder Technol. 2014, 264, 458–465. [Google Scholar] [CrossRef]
- Zhao, S.; Zhou, X.; Liu, W. Discrete element simulations of direct shear tests with particle angularity effect. Granul. Matter 2015, 17, 793–806. [Google Scholar] [CrossRef]
- Boon, C.; Houlsby, G.; Utili, S. A new algorithm for contact detection between convex polygonal and polyhedral particles in the discrete element method. Comput. Geotech. 2012, 44, 73–82. [Google Scholar] [CrossRef]
- Boon, C.; Houlsby, G.; Utili, S. A new contact detection algorithm for three-dimensional non-spherical particles. Powder Technol. 2013, 248, 94–102. [Google Scholar] [CrossRef]
- Dong, K.; Wang, C.; Yu, A. A novel method based on orientation discretization for discrete element modeling of non-spherical particles. Chem. Eng. Sci. 2015, 126, 500–516. [Google Scholar] [CrossRef]
- Torquato, S. Random Heterogeneous Materials: Microstructure and Macroscopic Properties; Springer-Verlag: New York, NY, USA, 2002. [Google Scholar]
- Hashin, Z.; Shtrikman, S. A variational approach to the theory of the elastic behaviour of polycrystals. J. Mech. Phys. Solids 1962, 10, 343–352. [Google Scholar] [CrossRef]
- Hashin, Z.; Shtrikman, S. A variational approach to the theory of the elastic behaviour of multiphase materials. J. Mech. Phys. Solids 1963, 11, 127–140. [Google Scholar] [CrossRef]
- Mori, T.; Tanaka, K. Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Metall. 1973, 21, 571–574. [Google Scholar] [CrossRef]
- Mallet, P.; Guérin, C.A.; Sentenac, A. Maxwell-Garnett mixing rule in the presence of multiple scattering: Derivation and accuracy. Phys. Rev. B 2005, 72, 014205. [Google Scholar] [CrossRef]
- Beran, M. Use of the vibrational approach to determine bounds for the effective permittivity in random media. Nuovo Cim. 1965, 38, 771–782. [Google Scholar] [CrossRef]
- Torquato, S. Microscopic Approach to Transport in Two-Phase Random Media. Ph.D. Thesis, State University of New York at Stony Brook, Stony Brook, NY, USA, 1980. [Google Scholar]
- Milton, G.W. Bounds on the Electromagnetic, Elastic, and Other Properties of Two-Component Composites. Phys. Rev. Lett. 1981, 46, 542–545. [Google Scholar] [CrossRef]
- Beran, M.; Molyneux, J. Use of classical variational principles to determine bounds for the effective bulk modulus in heterogeneous media. Q. Appl. Math. 1966, 24, 107–118. [Google Scholar] [CrossRef]
- Mccoy, J.J. On the displacement field in an elastic medium with random variations of material properties. Recent Adv. Eng. Sci. 1970, 5, 235–254. [Google Scholar]
- Milton, G.W.; Phan-Thien, N. New bounds on effective elastic moduli of two-component materials. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1982, 380, 305–331. [Google Scholar] [CrossRef]
- Gillman, A.; Amadio, G.; Matouš, K.; Jackson, T.L. Third-order thermo-mechanical properties for packs of Platonic solids using statistical micromechanics. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150060. [Google Scholar] [CrossRef]
- Džiugys, A.; Peters, B. An approach to simulate the motion of spherical and non-spherical fuel particles in combustion chambers. Granul. Matter 2001, 3, 231–266. [Google Scholar] [CrossRef]
- Jia, X.; Gan, M.; Williams, R.A.; Rhodes, D. Validation of a digital packing algorithm in predicting powder packing densities. Powder Technol. 2007, 174, 10–13. [Google Scholar] [CrossRef]
- Kohring, G.; Melin, S.; Puhl, H.; Tillemans, H.; Vermöhlen, W. Computer simulations of critical, non-stationary granular flow through a hopper. Comput. Methods Appl. Mech. Eng. 1995, 124, 273–281. [Google Scholar] [CrossRef]
- Grubmüller, H.; Heller, H.; Windemuth, A.; Schulten, K. Generalized Verlet algorithm for efficient molecular dynamics sim-ulations with long-range interactions. Mol. Simul. 1991, 6, 121–142. [Google Scholar] [CrossRef]
- He, H. Computational Modelling of Particle Packing in Concrete. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Model | Magnitude | Action Point | Normal Direction |
|---|---|---|---|---|
| Intersection [29,30] | Ellipse | Distance | Midpoint of intersection line | Perpendicular to the intersection line |
| Geometric potential [31,32,33] | Super-ellipse Super-quadric | Distance | Midpoint of two points with lowest geometric potential | Connecting two points with lowest geometric potential |
| Common normal [34,35] | Super-quadric | Distance | Midpoint of two surface points sharing a common normal | Connecting two points sharing a common normal |
| Intersection [36] | Polygon | Distance | Midpoint of intersection line | Perpendicular to the intersection line |
| Energy-based normal contact model [37] | Polygon | Area | Midpoint of two intersecting points for corner-corner contact | A direction that can decrease the contact energy with maximum rate |
| Intersection [38,39] | Polyhedron | Volume | Centroid of overlap volume | Perpendicular to the plane that is taken as the least-squares fit of hull intersection curve |
| Inner potential particles [40,41] | Polygon Polyhedron | Distance | Analytic center of linear inequalities | Gradient vector of an inner potential particle |
| Orientation discretization database solution [42] | Polygon, Ellipse, Ellipsoid and others. | Area(2D) Volume(3D) | Average of centers of overlap cells | Averaged normal vector of the cell at the surface of the particle |
| Forces and Torques | Symbols | Equations |
|---|---|---|
| Normal elastic force | ||
| Normal damping force | ||
| Tangential elastic force | ||
| Tangential damping force | ||
| Coulomb friction force | ||
| Torque by normal force | ||
| Torque by tangential force |
| Magnitude | Action Point | Normal Direction |
|---|---|---|
| Area (Volume in 3D): Ratio of sampling points | Centroid: Average of sample points | Pass the action point and parallel with the line connecting two centroids of particles |
| Number of Points | 105 | 106 | 107 |
|---|---|---|---|
| tGPU (s) | 0.024 s | 0.031 s | 0.462 s |
| tCPU (s) | 0.482 s | 0.625 s | 5.972 s |
| Precision (−) | 10−2 | 10−3 | 10−4 | 10−5 |
|---|---|---|---|---|
| tsuperellipse (s) | 0.13 | 0.78 | 6.46 | 43.25 |
| tsquare (s) | 0.06 | 0.21 | 2.71 | 18.52 |
| Roundness | 0.777560 | 0.886227 | 0.929950 | 0.952313 | 1 |
|---|---|---|---|---|---|
| κ of Ellipses | 3.417562 | 2.283670 | 1.883470 | 1.675994 | 1 |
| Regular polygons | Triangle | Square | Pentagon | Hexagon | Circle |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, S.; Chen, H.; Lin, J. A Universal Method for Modeling and Characterizing Non-Circular Packing Systems Based on n-Point Correlation Functions. Materials 2022, 15, 5991. https://doi.org/10.3390/ma15175991
Sun S, Chen H, Lin J. A Universal Method for Modeling and Characterizing Non-Circular Packing Systems Based on n-Point Correlation Functions. Materials. 2022; 15(17):5991. https://doi.org/10.3390/ma15175991
Chicago/Turabian StyleSun, Shaobo, Huisu Chen, and Jianjun Lin. 2022. "A Universal Method for Modeling and Characterizing Non-Circular Packing Systems Based on n-Point Correlation Functions" Materials 15, no. 17: 5991. https://doi.org/10.3390/ma15175991