
Design and Manufacturing of a Metal-Based Mechanical Metamaterial with Tunable Damping Properties

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Restrictions of a Metal Unit Cell
2.2. Additive Manufacturing
2.3. Finite Element Modeling
2.4. Mechanical Testing
2.5. Nondestructive Characterization
3. Results
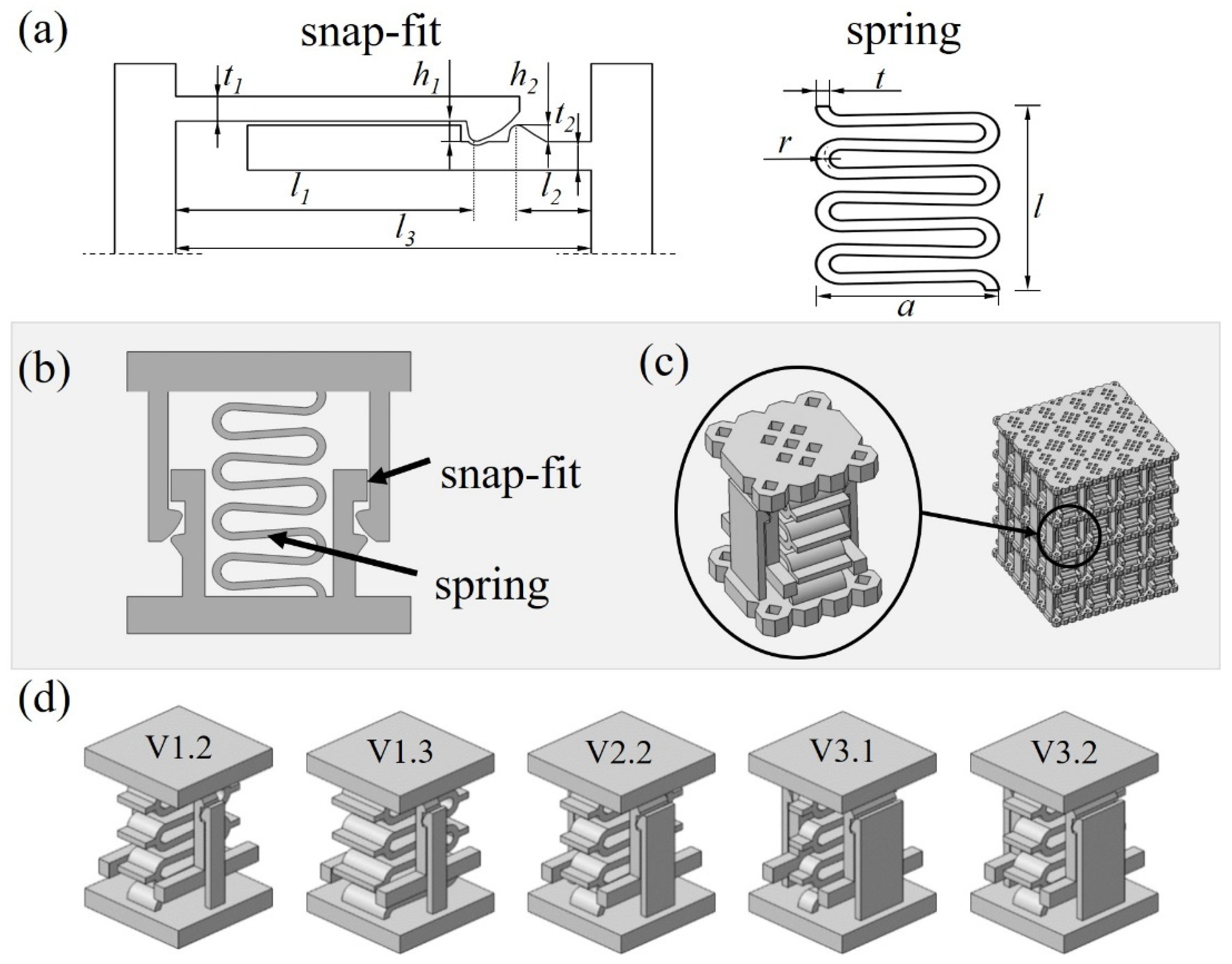
3.1. Design of Metamaterial for Recoverable Energy Absorption and Dissipation
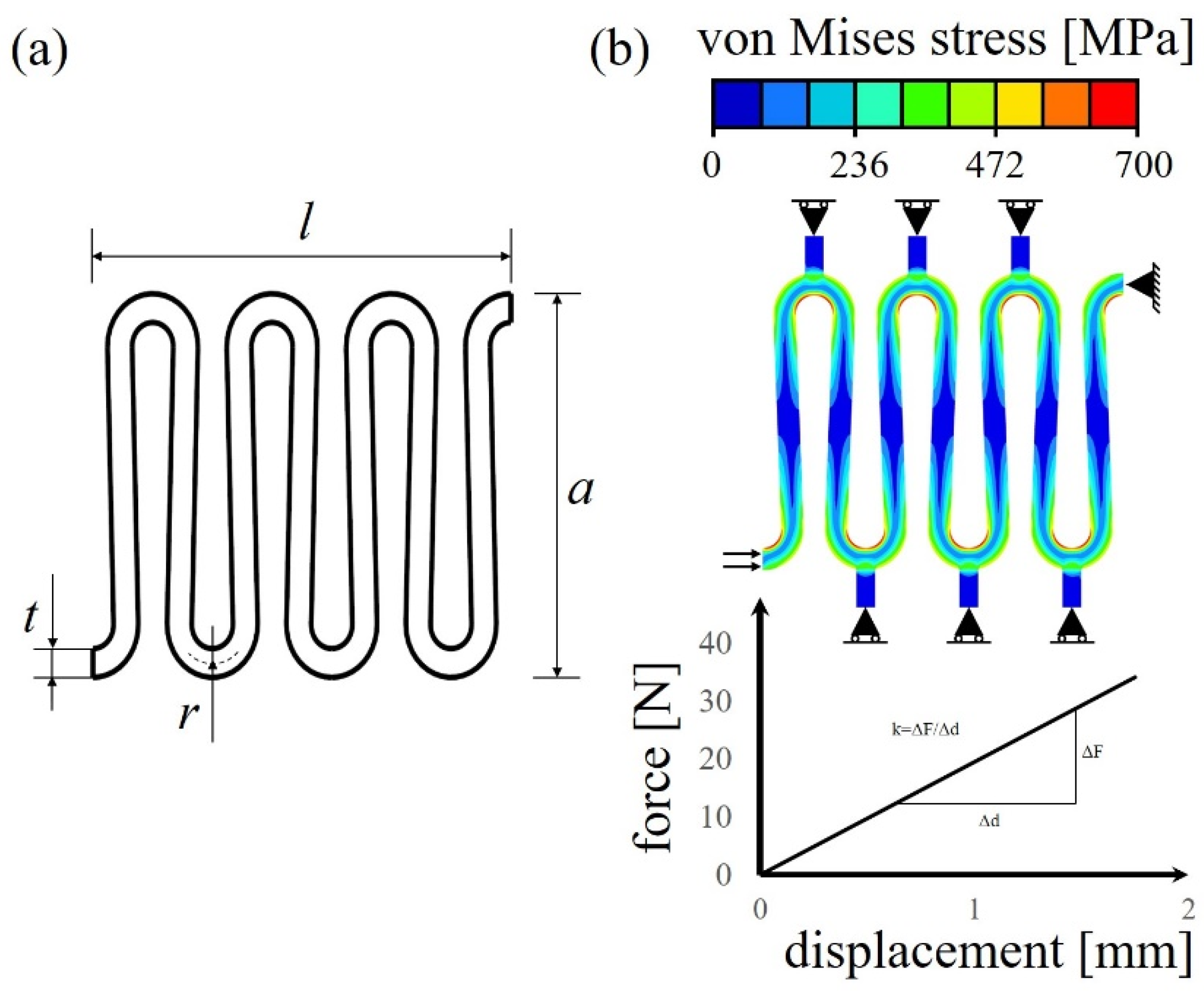
- Parameters of the spring element: 7 windings, t = 0.6 mm, l = 10.15 mm, a = 8 mm, r = 0.8 mm;
- Parameters of the snap-fit mechanism: t1 = 0.6 mm, t1 = 0.8 mm, h1 = 0.4 mm, h2 = 0.4 mm, l1 = 7.35 mm, l2 = 1.8 mm and l3 = 10.15 mm.
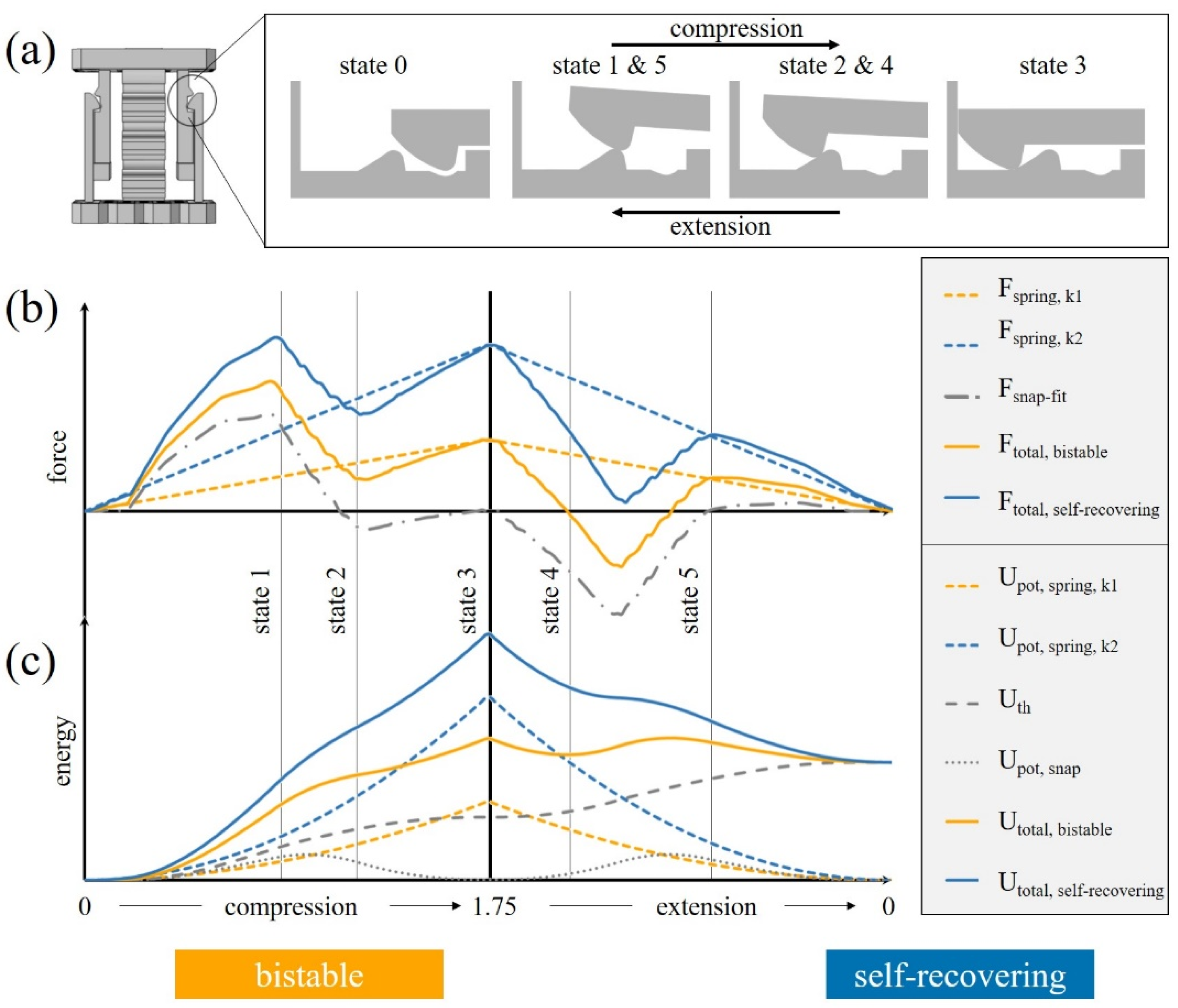
3.2. Analytical Model
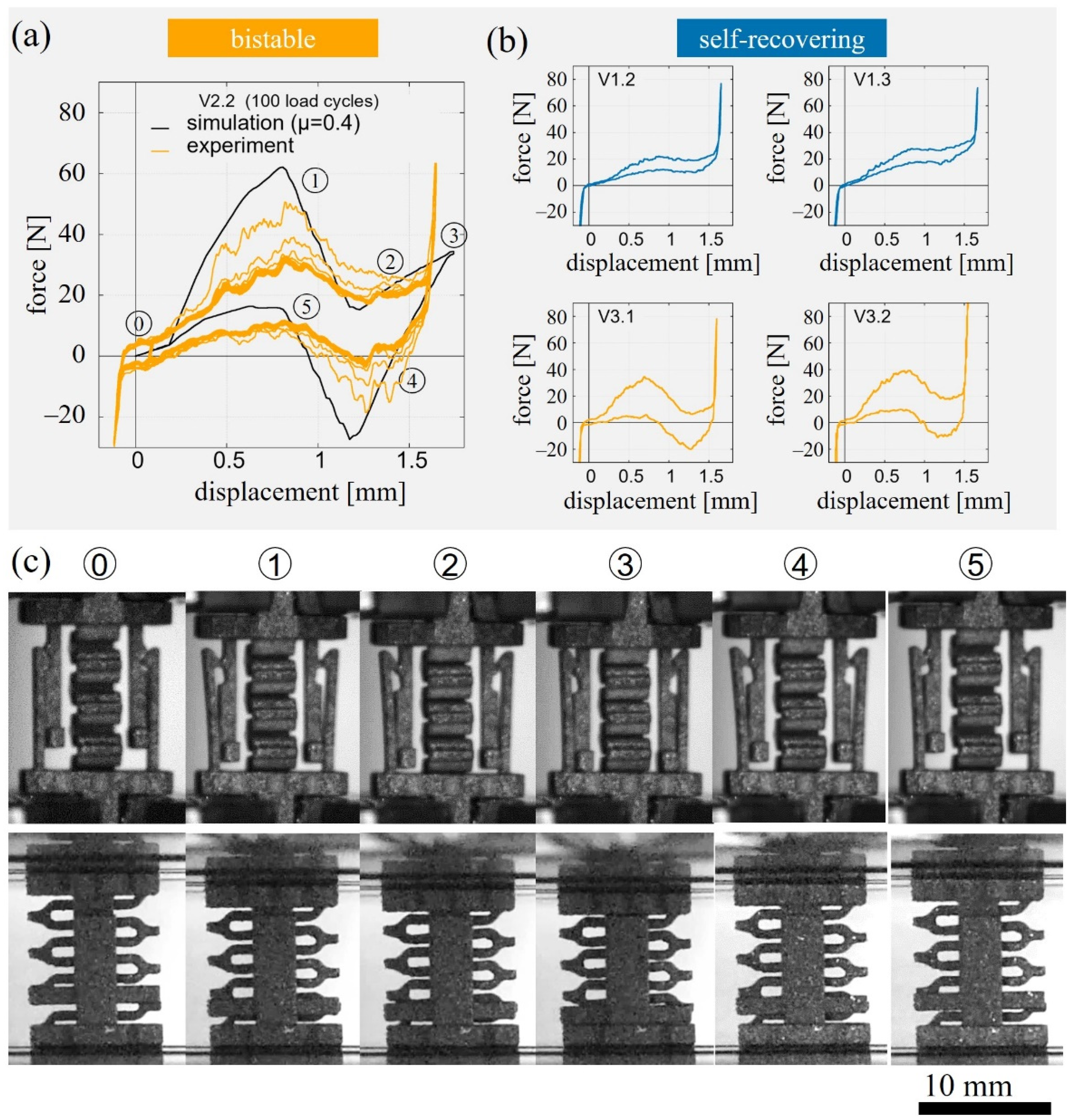
3.3. Numerical Simulations
3.4. Cyclic Mechanical Testing
3.5. Friction Behavior
3.6. Damping Behavior
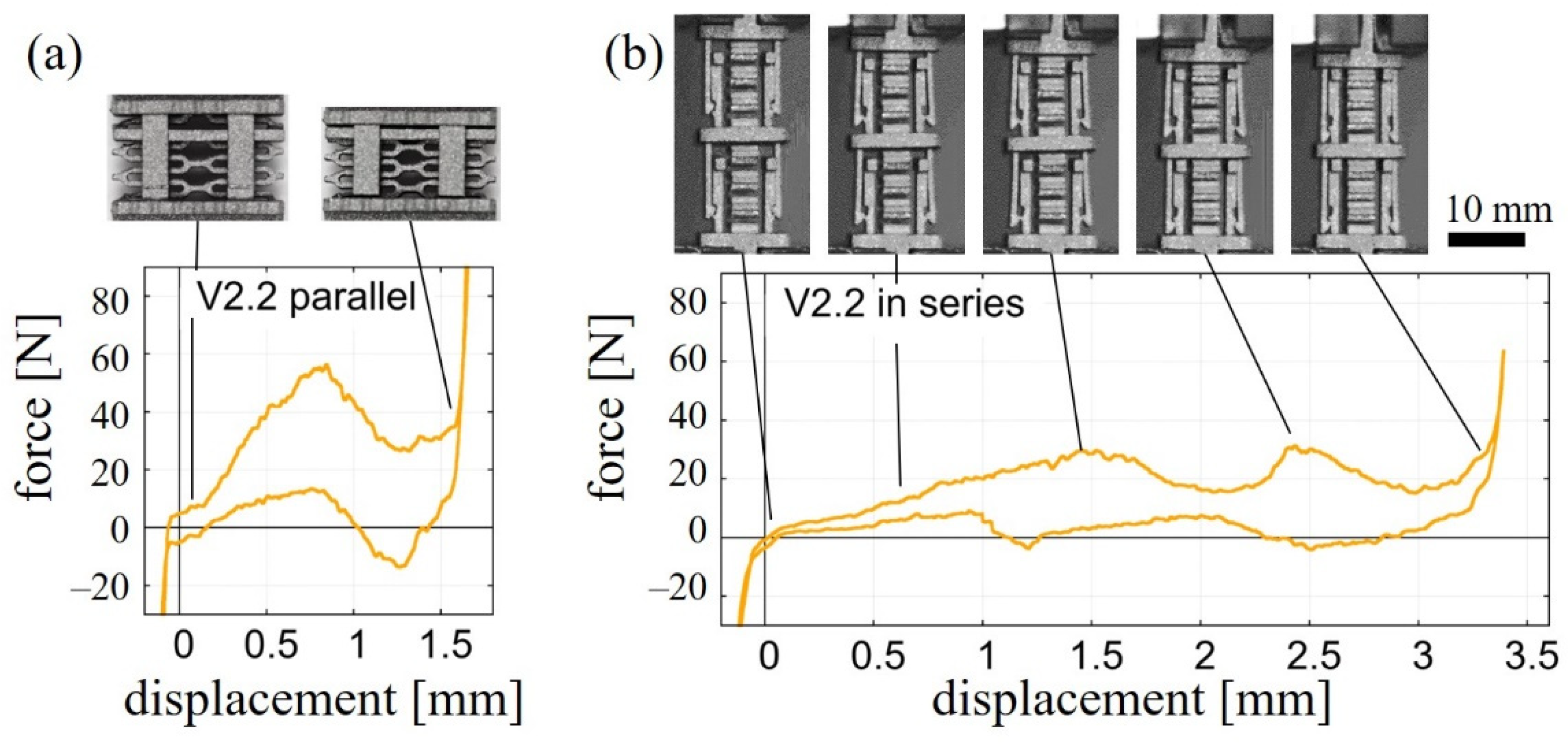
3.7. Arrangement of Unit Cells in Parallel and in Series
4. Discussion
- Manufacturing tolerances play an important role in the filigree structures as these result in comparatively large relative deviations in the effective shape.
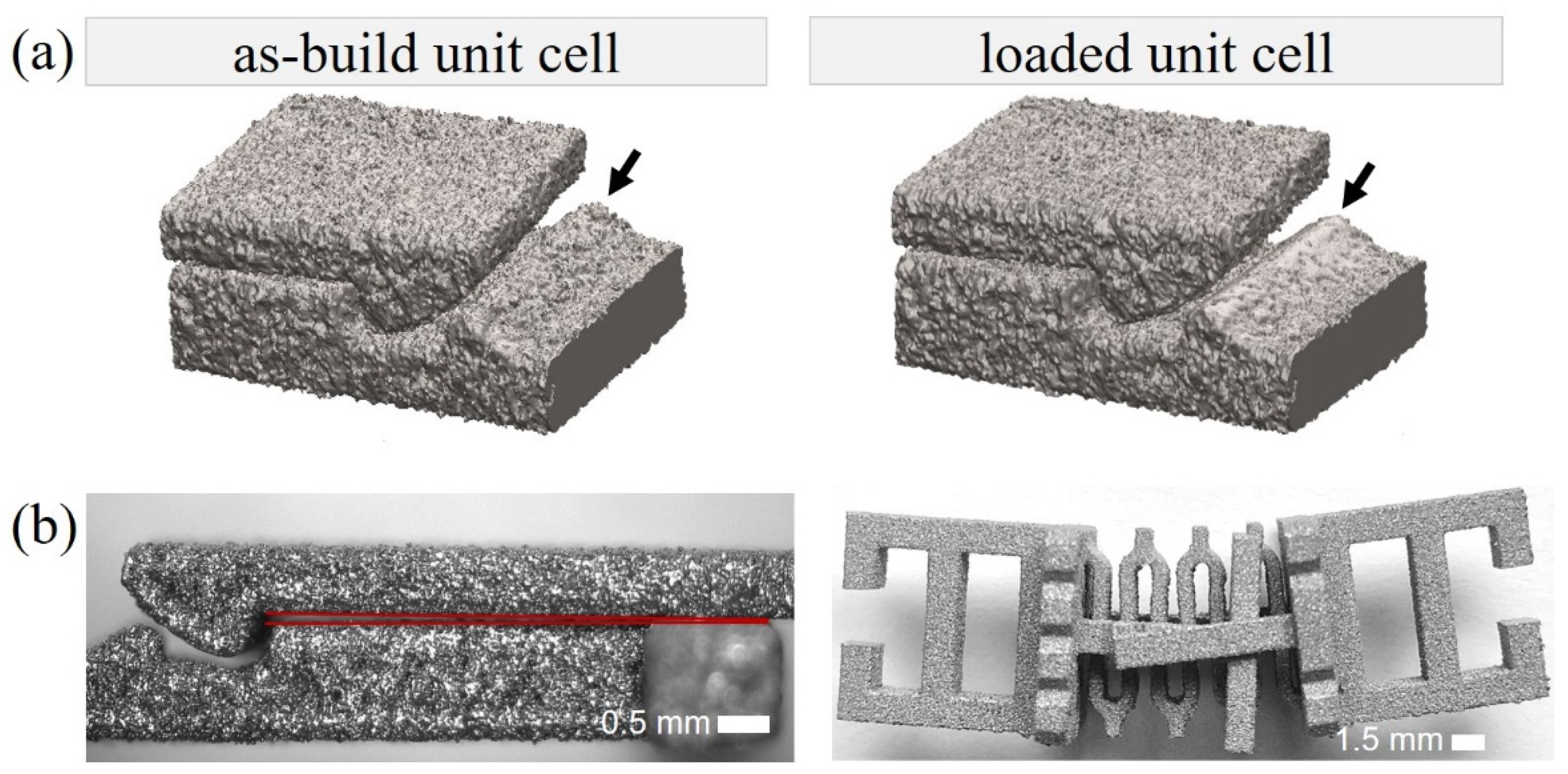
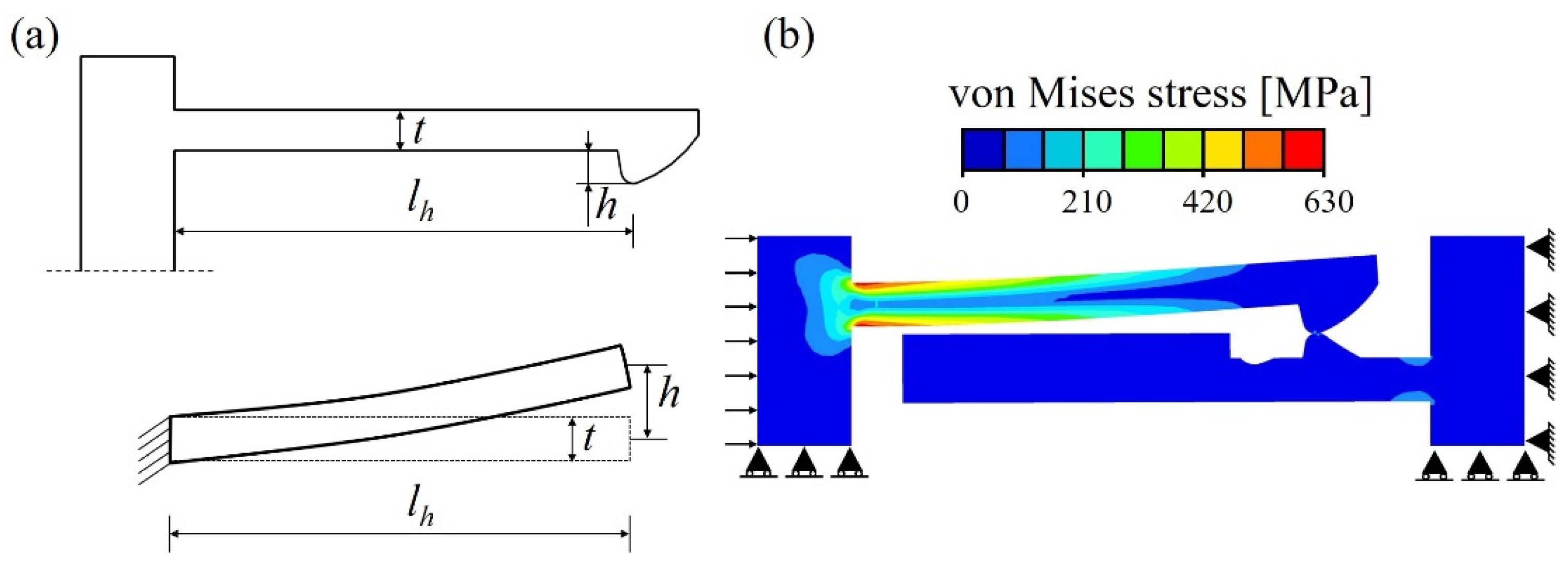
- Surface roughness is another artefact of the additive manufacturing process in a metal powder bed as it results in a rough surface layer, as mentioned by Garland [36] and Qui [37]. Microscopic optical images and CT-scans of the unit cells confirmed particle attachment on the sample surfaces. Poorly melted particles were removed during the first loading cycles due to the frictional contact, which reduces the coefficient of friction through wear and rounds off the joining surfaces, reducing the effective hook depth of the snap-fits (see Figure 4a).
- Distortion of cells occurs due to the release of thermal residual stresses caused by the manufacturing process. For the snap-fit, deviations result in a reduction of the overhanging distance of the hook and thereby influence the normal force of the frictional contact.
- Warpage is caused because the compliant spring allows the samples to bend around the axis of the extrusion direction after removal of the supporting structures needed for the manufacturing process. This leads to a prestress in the samples during the experimental setup when clamping them in a position with parallel base plates.
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Dimensioning of Snap-Fit Mechanism

Appendix A.2. Dimensioning of Spring Mechanism

Appendix B
References
- Davoodi, M.M.; Sapuan, S.M.; Aidy, A.; Abu Osman, N.A.; Oshkour, A.A.; Wan Abas, W. Development process of new bumper beam for passenger car: A review. Mater. Des. 2012, 40, 304–313. [Google Scholar] [CrossRef]
- Caserta, G.D.; Iannucci, L.; Galvanetto, U. Shock absorption performance of a motorbike helmet with honeycomb reinforced liner. Compos. Struct. 2011, 93, 2748–2759. [Google Scholar] [CrossRef]
- Di Landro, L.; Sala, G.; Olivieri, D. Deformation mechanisms and energy absorption of polystyrene foams for protective helmets. Polym. Test. 2002, 21, 217–228. [Google Scholar] [CrossRef]
- Shinagawa, M.; Shamoto, E. Study on Dynamic Stiffness of Machine Tool with Consideration of Friction Damping in Guide. AMR 2012, 497, 68–72. [Google Scholar] [CrossRef]
- Ashby, M.F. Materials Selection in Mechanical Design, 2nd ed.; Butterworth Heinemann: Oxford, UK, 1999; ISBN 0750643579. [Google Scholar]
- Gagnon, L.; Morandini, M.; Ghiringhelli, G.L. A review of friction damping modeling and testing. Arch. Appl. Mech. 2020, 90, 107–126. [Google Scholar] [CrossRef]
- Karayel, D.; Atali, G.; Ozkan, S. Design of a New Energy Absorber Based on the Coulomb Friction to Protect Structures Against Impact Loads. Acta Phys. Pol. A 2018, 134, 109–112. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, G.; Yang, H.; Li, M. Analysis of Damping Characteristics of a Hydraulic Shock Absorber. Shock. Vib. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Duym, S.; Stiens, R.; Rerybrouck, K. Evaluation of Shock Absorber Models. Veh. Syst. Dyn. 1997, 27, 109–127. [Google Scholar] [CrossRef]
- Surjadi, J.U.; Gao, L.; Du, H.; Li, X.; Xiong, X.; Fang, N.X.; Lu, Y. Mechanical Metamaterials and Their Engineering Applications. Adv. Eng. Mater. 2019, 21, 1800864. [Google Scholar] [CrossRef]
- Tong, X.C. Functional Metamaterials and Metadevices; Springer: Cham, Germany, 2018; ISBN 978-3-319-66043-1. [Google Scholar]
- Wu, W.; Hu, W.; Qian, G.; Liao, H.; Xu, X.; Berto, F. Mechanical design and multifunctional applications of chiral mechanical metamaterials: A review. Mater. Des. 2019, 180, 107950. [Google Scholar] [CrossRef]
- Kadic, M.; Milton, G.W.; van Hecke, M.; Wegener, M. 3D metamaterials. Nat. Rev. Phys. 2019, 1, 198–210. [Google Scholar] [CrossRef]
- Jia, Z.; Liu, F.; Jiang, X.; Wang, L. Engineering lattice metamaterials for extreme property, programmability, and multifunctionality. J. Appl. Phys. 2020, 127, 150901. [Google Scholar] [CrossRef]
- Zadpoor, A.A. Mechanical meta-materials. Mater. Horiz. 2016, 3, 371–381. [Google Scholar] [CrossRef]
- Schwerdtfeger, J.; Wein, F.; Leugering, G.; Singer, R.F.; Körner, C.; Stingl, M.; Schury, F. Design of auxetic structures via mathematical optimization. Adv. Mater. Weinheim. 2011, 23, 2650–2654. [Google Scholar] [CrossRef] [PubMed]
- Correa, D.M.; Seepersad, C.C.; Haberman, M.R. Mechanical design of negative stiffness honeycomb materials. Integr. Mater. 2015, 4, 165–175. [Google Scholar] [CrossRef]
- Dell’Isola, F.; Seppecher, P.; Alibert, J.J.; Lekszycki, T.; Grygoruk, R.; Pawlikowski, M.; Steigmann, D.; Giorgio, I.; Andreaus, U.; Turco, E.; et al. Pantographic metamaterials: An example of mathematically driven design and of its technological challenges. Contin. Mech. Thermodyn. 2019, 31, 851–884. [Google Scholar] [CrossRef]
- Frenzel, T.; Kadic, M.; Wegener, M. Three-dimensional mechanical metamaterials with a twist. Science 2017, 358, 1072–1074. [Google Scholar] [CrossRef]
- Thompson, M.K.; Moroni, G.; Vaneker, T.; Fadel, G.; Campbell, R.I.; Gibson, I.; Bernard, A.; Schulz, J.; Graf, P.; Ahuja, B.; et al. Design for Additive Manufacturing: Trends, opportunities, considerations, and constraints. CIRP Ann. 2016, 65, 737–760. [Google Scholar] [CrossRef]
- Fischer, S.C.L.; Hillen, L.; Eberl, C. Mechanical Metamaterials on the Way from Laboratory Scale to Industrial Applications: Challenges for Characterization and Scalability. Materials 2020, 13, 3605. [Google Scholar] [CrossRef]
- Pfaff, A.; Jäcklein, M.; Hoschke, K.; Wickert, M. Designed Materials by Additive Manufacturing—Impact of Exposure Strategies and Parameters on Material Characteristics of AlSi10Mg Processed by Laser Beam Melting. Metals 2018, 8, 491. [Google Scholar] [CrossRef]
- Che, K.; Yuan, C.; Qi, H.J.; Meaud, J. Viscoelastic multistable architected materials with temperature-dependent snapping sequence. Soft Matter 2018, 14, 2492–2499. [Google Scholar] [CrossRef] [PubMed]
- Findeisen, C.; Hohe, J.; Kadic, M.; Gumbsch, P. Characteristics of mechanical metamaterials based on buckling elements. J. Mech. Phys. Solids 2017, 102, 151–164. [Google Scholar] [CrossRef]
- Frenzel, T.; Findeisen, C.; Kadic, M.; Gumbsch, P.; Wegener, M. Tailored Buckling Microlattices as Reusable Light-Weight Shock Absorbers. Adv. Mater. Weinheim. 2016, 28, 5865–5870. [Google Scholar] [CrossRef] [PubMed]
- Ha, C.S.; Lakes, R.S.; Plesha, M.E. Design, fabrication, and analysis of lattice exhibiting energy absorption via snap-through behavior. Mater. Des. 2018, 141, 426–437. [Google Scholar] [CrossRef]
- Rafsanjani, A.; Akbarzadeh, A.; Pasini, D. Snapping mechanical metamaterials under tension. Adv. Mater. 2015, 27, 5931–5935. [Google Scholar] [CrossRef]
- Shan, S.; Kang, S.H.; Raney, J.R.; Wang, P.; Fang, L.; Candido, F.; Lewis, J.A.; Bertoldi, K. Multistable Architected Materials for Trapping Elastic Strain Energy. Adv. Mater. 2015, 27, 4296–4301. [Google Scholar] [CrossRef]
- Yang, H.; Ma, L. Multi-stable mechanical metamaterials by elastic buckling instability. J. Mater. Sci. 2019, 54, 3509–3526. [Google Scholar] [CrossRef]
- Zhang, Y.; Restrepo, D.; Velay-Lizancos, M.; Mankame, N.D.; Zavattieri, P.D. Energy dissipation in functionally two-dimensional phase transforming cellular materials. Sci. Rep. 2019, 9, 12581. [Google Scholar] [CrossRef]
- Haghpanah, B.; Shirazi, A.; Salari-Sharif, L.; Guell Izard, A.; Valdevit, L. Elastic architected materials with extreme damping capacity. Extrem. Mech. Lett. 2017, 17, 56–61. [Google Scholar] [CrossRef]
- Jiang, H.; Le Barbenchon, L.; Bednarcyk, B.A.; Scarpa, F.; Chen, Y. Bioinspired multilayered cellular composites with enhanced energy absorption and shape recovery. Addit. Manuf. 2020, 36, 101430. [Google Scholar] [CrossRef]
- Tan, X.; Chen, S.; Wang, B.; Zhu, S.; Wu, L.; Sun, Y. Design, fabrication, and characterization of multistable mechanical metamaterials for trapping energy. Extrem. Mech. Lett. 2019, 28, 8–21. [Google Scholar] [CrossRef]
- Haghpanah, B.; Salari-Sharif, L.; Pourrajab, P.; Hopkins, J.; Valdevit, L. Multistable Shape-Reconfigurable Architected Materials. Adv. Mater. Weinheim. 2016, 28, 7915–7920. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Lang, J.H.; Slocum, A.H. A Curved-Beam Bistable Mechanism. J. Microelectromech. Syst. 2004, 13, 137–146. [Google Scholar] [CrossRef]
- Garland, A.P.; Adstedt, K.M.; Casias, Z.J.; White, B.C.; Mook, W.M.; Kaehr, B.; Jared, B.H.; Lester, B.T.; Leathe, N.S.; Schwaller, E.; et al. Coulombic friction in metamaterials to dissipate mechanical energy. Extrem. Mech. Lett. 2020, 40, 100847. [Google Scholar] [CrossRef]
- Salzbrenner, B.C.; Rodelas, J.M.; Madison, J.D.; Jared, B.H.; Swiler, L.P.; Shen, Y.-L.; Boyce, B.L. High-throughput stochastic tensile performance of additively manufactured stainless steel. J. Mater. Process. Technol. 2017, 241, 1–12. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | V1.2 | V1.3 | V2.2 | V3.1 | V3.2 |
|---|---|---|---|---|---|
| bsnap | 1.5 mm | 1.5 mm | 3 mm | 4.5 mm | 4.5 mm |
| Fsnap,e | 16 to 25 N | 16 to 25 N | 31 to 50 N | 47 to 74 N | 47 to 74 N |
| bspring | 3 mm | 4.5 mm | 3 mm | 1.5 mm | 3 mm |
| Fspring,e | 24 N | 35 N | 24 N | 16 N | 24 N |
| bsnap/bspring | 0.5 | 0.3 | 1 | 3 | 1.5 |
| Fcell,e | −8 to 1 N | −20 to −11 N | 8 to 26 N | 31 to 59 N | 23 to 50 N |
| expected behavior | ambiguous | self-recovering | bistable | bistable | bistable |
| Unit Cell | F1 [N] | F2 [N] | F3 [N] | F4 [N] | F5 [N] |
|---|---|---|---|---|---|
| V1.2 | 22.2 ± 0.4 | 18.5 ± 0.7 | 28.2 ± 1.5 | 9.6 ± 0.4 | 12.2 ± 0.1 |
| V1.3 | 27.5 ± 0.6 | 27.2 ± 0.6 | 37.7 ± 1.2 | 16.4 ± 0.5 | 17.9 ± 0.1 |
| V2.2 | 30.8 ± 1.2 | 17.6 ± 0.6 | 27.9 ± 1.3 | −1.3 ± 1.6 | 10.6 ± 1.0 |
| V3.1 | 33.9 ± 0.6 | 6.8 ± 0.6 | 16.4 ± 0.6 | −20.1 ± 0.2 | 5.8 ± 0.7 |
| V3.2 | 39.4 ± 1.5 | 17.2 ± 1.3 | 28.1 ± 1.5 | −10.7 ± 0.7 | 9.6 ± 0.4 |
| Unit Cell | U [mJ] | ΔU [mJ] | η [-] | Eunit,cell [MPa] |
|---|---|---|---|---|
| V1.2 | 24.7 ± 1.4 | 9.4 ± 0.4 | 0.0622 ± 0.0019 | 2.1 ± 0.2 |
| V1.3 | 34.8 ± 0.3 | 11.0± 0.2 | 0.0502 ± 0.0008 | 2.7 ± 0.1 |
| V2.2 | 31.0 ± 1.8 | 22.7 ± 2.4 | 0.116 ± 0.007 | 2.0 ± 0.1 |
| V3.1 | 26.0 ± 1.5 | 31.2 ± 2.0 | 0.1914 ± 0.0016 | 1.2 ± 0.02 |
| V3.2 | 36.0 ± 0.8 | 33.5 ± 1.0 | 0.1478 ± 0.0012 | 2.2 ± 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kappe, K.; Wahl, J.P.; Gutmann, F.; Boyadzhieva, S.M.; Hoschke, K.; Fischer, S.C.L. Design and Manufacturing of a Metal-Based Mechanical Metamaterial with Tunable Damping Properties. Materials 2022, 15, 5644. https://doi.org/10.3390/ma15165644
Kappe K, Wahl JP, Gutmann F, Boyadzhieva SM, Hoschke K, Fischer SCL. Design and Manufacturing of a Metal-Based Mechanical Metamaterial with Tunable Damping Properties. Materials. 2022; 15(16):5644. https://doi.org/10.3390/ma15165644
Chicago/Turabian StyleKappe, Konstantin, Jan P. Wahl, Florian Gutmann, Silviya M. Boyadzhieva, Klaus Hoschke, and Sarah C. L. Fischer. 2022. "Design and Manufacturing of a Metal-Based Mechanical Metamaterial with Tunable Damping Properties" Materials 15, no. 16: 5644. https://doi.org/10.3390/ma15165644