
Performance of 3D-Printed Bionic Conch-Like Composite Plate under Low-Velocity Impact


Abstract
:1. Introduction
2. Materials and Methods
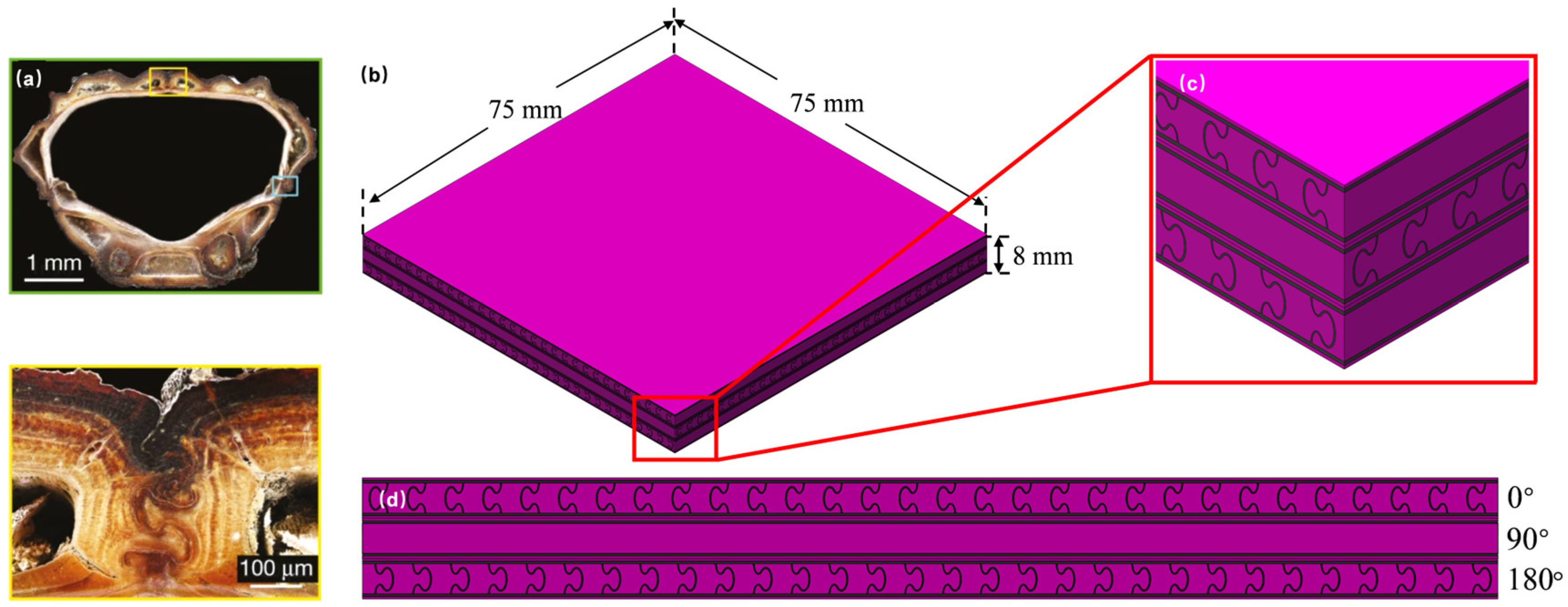
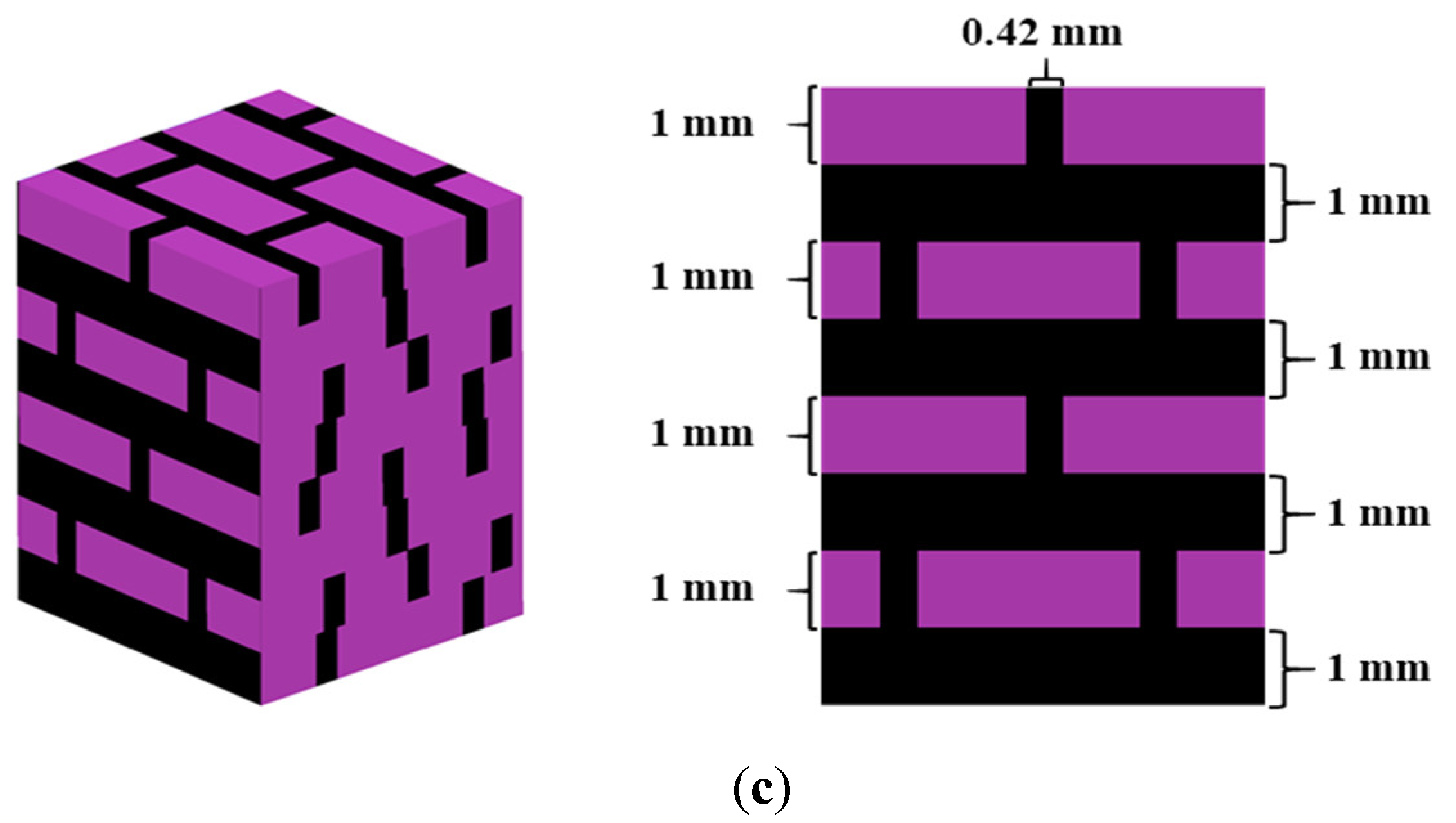
2.1. Bionic Composites Design and Fabrication







2.2. Drop Tower Test
3. Results and Discussion
3.1. Impact Resistances of Bio-S, Bio-B, Bio-S and MSP

3.2. Effect of the Ply Angle on the Impact Resistance of Bio-S





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EA (J) | ΔV (m/s) | Peak Force (N) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Impact Energy | 15 J | 20 J | 25 J | 15 J | 20 J | 25 J | 15 J | 20 J | 25 J |
| (0°/90°/0°/90°) | 15.0 | 20.0 | 21.33 | 1.78 | 2.06 | 1.40 | 2214.8 | 2366.9 | 2237.3 |
| (15°/90°/15°/90°) | 15.0 | 20.0 | 22.23 | 1.78 | 2.06 | 1.51 | 2079.8 | 2176.6 | 2214.7 |
| (30°/90°/30°/90°), (0°/60°/0°/60°) | 15.0 | 20.0 | 22.21 | 1.78 | 2.06 | 1.52 | 2390.6 | 2559.1 | 2550.3 |
| (45°/90°/45°/90°) | 15.0 | 19.7 | 21.67 | 1.78 | 1.79 | 1.44 | 2302.4 | 2465.0 | 2685.0 |
| (0°/30°/0°/30°) | 15.0 | 20.0 | 23.67 | 1.78 | 2.06 | 1.52 | 2394.3 | 2494.0 | 2556.4 |
4. Crack Propagation Mode
4.1. Crack Propagation Mode
4.2. Crack Propagation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ghazlan, A.; Ngo, T.; Tan, P.; Xie, Y.M.; Tran, P.; Donough, M. Inspiration from Nature’s body armours—A review of biological and bioinspired composites. Compos. Part B 2021, 205, 108513. [Google Scholar] [CrossRef]
- Ha, N.S.; Lu, G. A review of recent research on bio-inspired structures and materials for energy absorption applications. Compos. Part B 2020, 181, 107496. [Google Scholar] [CrossRef]
- Yang, W.; Chen, I.H.; Gludovatz, B.; Zimmermann, E.A.; Ritchie, R.O.; Meyers, M.A. Natural flexible dermal armor. Adv. Mater. 2013, 25, 31–48. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.K.; Hazell, P.J.; Escobedo, J.P.; Wang, H. Biomimetic armour design strategies for additive manufacturing: A review. Mater. Des. 2021, 205, 109730. [Google Scholar] [CrossRef]
- Le, T.V.; Ghazlan, A.; Ngo, T.; Nguyen, T.; Remennikov, A. A comprehensive review of selected biological armor systems—From structure-function to bio-mimetic techniques. Compos. Struct. 2019, 225, 111172. [Google Scholar] [CrossRef]
- Jiang, H.; Ren, Y.; Liu, Z.; Zhang, S.; Lin, Z. Low-velocity impact resistance behaviors of bio-inspired helicoidal composite laminates with non-linear rotation angle based layups. Compos. Struct. 2019, 214, 463–475. [Google Scholar] [CrossRef]
- Deng, Y.; Ren, Y.; Fu, X.; Jiang, H. Bionic-bamboo design for enhancing the crashworthiness of composite tube with groove trigger subjected to oblique load. Int. J. Mech. Sci. 2021, 206, 106635. [Google Scholar] [CrossRef]
- Xu, M.; Pan, L.; Chen, J.; Zhang, X.; Yu, X. The flexural properties of end-trabecular beetle elytron plates and their flexural failure mechanism. J. Mater. Sci. 2019, 54, 8414–8425. [Google Scholar] [CrossRef]
- Yang, J.; Gu, D.; Lin, K.; Yang, Y.; Ma, C. Optimization of bio-inspired bi-directionally corrugated panel impact-resistance structures: Numerical simulation and selective laser melting process. J. Mech. Behav. Biomed. 2019, 91, 59–67. [Google Scholar] [CrossRef]
- Zhang, M.; Zhao, N.; Yu, Q.; Liu, Z.; Qu, R.; Zhang, J.; Li, S.; Ren, D.; Berto, F.; Zhang, Z.; et al. On the damage tolerance of 3-D printed Mg-Ti interpenetrating-phase composites with bioinspired architectures. Nat. Commun. 2022, 13, 3247. [Google Scholar] [CrossRef]
- Connors, M.; Yang, T.; Hosny, A.; Deng, Z.; Yazdandoost, F.; Massaadi, H.; Eernisse, D.; Mirzaeifar, R.; Dean, M.N.; Weaver, J.C.; et al. Bioinspired design of flexible armor based on chiton scales. Nat. Commun. 2019, 10, 5413. [Google Scholar] [CrossRef] [Green Version]
- González-Albuixech, V.; Rodríguez-Millán, M.; Ito, T.; Loya, J.A.; Miguélez, M. Numerical analysis for design of bioinspired ceramic modular armors for ballistic protections. Int. J. Damage Mech. 2018, 28, 105678951879520. [Google Scholar] [CrossRef] [Green Version]
- Ong, C.W.R.; Zhang, M.-H.; Du, H.; Pang, S.D. Cellular cement composites against projectile impact. Int. J. Impact Eng. 2015, 86, 13–26. [Google Scholar] [CrossRef]
- Guo, Y.-X.; Yuan, M.-Q.; Qian, X.-M. Bionic stab-resistant body armor based on triangular pyramid structure. Def. Technol. 2021, 17, 792–799. [Google Scholar] [CrossRef]
- Ha, N.S.; Lu, G.; Xiang, X. Energy absorption of a bio-inspired honeycomb sandwich panel. J. Mater. Sci. 2019, 54, 6286–6300. [Google Scholar] [CrossRef]
- Meng, L.; Liang, H.; Yu, H.; Yang, J.; Li, F.; Wang, Z.; Zeng, X. The energy absorption and bearing capacity of light-weight bio-inspired structures produced by selective laser melting. J. Mech. Behav. Biomed. 2019, 93, 170–182. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, Q.; Fu, J.; Li, Q.; Hui, D. Dynamic crash responses of bio-inspired aluminum honeycomb sandwich structures with CFRP panels. Compos. Part. B 2017, 121, 122–133. [Google Scholar] [CrossRef]
- Guo, X.; Dong, X.; Yu, Z.; Zhang, Z.; Xie, X.; Wang, X.; Xin, R.; Yan, W. Study on the Mechanical Properties of Bionic Protection and Self-Recovery Structures. Materials 2020, 13, 389. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Zhu, D.; Yao, Y.; Wang, J.; Bui, T.Q. Numerical simulation of ballistic impact behavior of bio-inspired scale-like protection system. Mater. Des. 2016, 99, 201–210. [Google Scholar] [CrossRef]
- Yaraghi, N.A.; Guarín-Zapata, N.; Grunenfelder, L.K.; Hintsala, E.; Bhowmick, S.; Hiller, J.M.; Betts, M.; Principe, E.L.; Jung, J.Y.; Sheppard, L.; et al. A Sinusoidally Architected Helicoidal Biocomposite. Adv. Mater. 2016, 28, 6835–6844. [Google Scholar] [CrossRef] [Green Version]
- Yaraghi, N.A.; Trikanad, A.A.; Restrepo, D.; Huang, W.; Rivera, J.; Herrera, S.; Zhernenkov, M.; Parkinson, D.Y.; Caldwell, R.L.; Zavattieri, P.; et al. The Stomatopod Telson: Convergent Evolution in the Development of a Biological Shield. Adv. Funct. Mater. 2019, 29, 1902238. [Google Scholar] [CrossRef]
- Wu, J.; Qin, Z.; Qu, L.; Zhang, H.; Deng, F.; Guo, M. Natural hydrogel in American lobster: A soft armor with high toughness and strength. Acta Biomater. 2019, 88, 102–110. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Song, Z.; Zhang, S.; Ni, Y.; Cai, S.; Gong, X.; He, L.; Yu, S.-H. Discontinuous fibrous Bouligand architecture enabling formidable fracture resistance with crack orientation insensitivity. Proc. Natl. Acad. Sci. USA 2020, 117, 15465–15472. [Google Scholar] [CrossRef] [PubMed]
- Barthelat, F.; Tang, H.; Zavattieri, P.; Li, C.; Espinosa, H. On the mechanics of mother-of-pearl: A key feature in the material hierarchical structure. J. Mech. Phys. Solids 2007, 55, 306–337. [Google Scholar] [CrossRef]
- Le, T.V.; Ghazlan, A.; Ngo, T.; Nguyen, T. Performance of a bio-mimetic 3D printed conch-like structure under quasi-static loading. Compos. Struct. 2020, 246, 112433. [Google Scholar] [CrossRef]
- Cui, Y.; Wang, F.; Hu, Q.; Zhang, W. Study on antifatigue crack growth characteristics of ball-end milling bionic surface. Coatings 2022, 12, 327. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, J.; Yu, T.X. Dynamic behaviors of bio-inspired structures: Design, mechanisms, and models. Eng. Struct. 2022, 265, 114490. [Google Scholar] [CrossRef]
- Tran, P.; Ngo, T.D.; Ghazlan, A.; Hui, D. Bimaterial 3D printing and numerical analysis of bio-inspired composite structures under in-plane and transverse loadings. Composites Part. B 2017, 108, 210–223. [Google Scholar] [CrossRef]
- Wei, Z.; Xu, X. Gradient design of bio-inspired nacre-like composites for improved impact resistance. Composites Part. B 2021, 215, 108830. [Google Scholar] [CrossRef]
- Salinas, C.L.; de Obaldia, E.E.; Jeong, C.; Hernandez, J.; Zavattieri, P.; Kisailus, D. Enhanced toughening of the crossed lamellar structure revealed by nanoindentation. J. Mech. Behav. Biomed. 2017, 76, 58–68. [Google Scholar] [CrossRef]
- Gu, G.X.; Takaffoli, M.; Hsieh, A.J.; Buehler, M.J. Biomimetic additive manufactured polymer composites for improved impact resistance. Extreme Mech. Lett. 2016, 9, 317–323. [Google Scholar] [CrossRef]
- Gu, G.X.; Takaffoli, M.; Buehler, M.J. Hierarchically Enhanced Impact Resistance of Bioinspired Composites. Adv. Mater. 2017, 29, 1700060. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Luan, Y.; Zhou, Z.; Song, C.; Wang, Z.; Guo, Z.; Li, Y. Hierarchical structure design of Strombus gigas shell inspired laminated artificial composites and the mechanical performance optimization strategy. Mech. Adv. Mater. Struct. 2022. [Google Scholar] [CrossRef]
- Rivera, J.; Hosseini, M.S.; Restrepo, D.; Murata, S.; Vasile, D.; Parkinson, D.Y.; Barnard, H.S.; Arakaki, A.; Zavattieri, P.; Kisailus, D. Toughening mechanisms of the elytra of the diabolical ironclad beetle. Nature 2020, 586, 543–548. [Google Scholar] [CrossRef]
- Zhang, J.; Yuan, Q.; Jiang, Y.; Pang, H.; Rajabi, H.; Wu, Z.; Wu, J. Elytra coupling of the ladybirdCoccinella septempunctatafunctions as an energy absorber in intentional falls. Bioinspir. Biomim. 2021, 16, 056018. [Google Scholar] [CrossRef]
- Ju, M.; Li, X.; Li, X.; Zhang, G. A review of the effects of weak interfaces on crack propagation in rock: From phenomenon to mechanism. Eng. Fract. Mech. 2022, 263, 108297. [Google Scholar] [CrossRef]









| Density (kg/m3) | Elastic Modulus (MPa) | Poisson’s Ratio | Failure Stress (MPa) | Elongation | |
|---|---|---|---|---|---|
| Value | 1175 | 2996 | 0.3 | 55 | 30% |
| EA (J) | ΔV (m/s) | Peak Force (N) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Impact Energy | 15 J | 20 J | 25 J | 15 J | 20 J | 25 J | 15 J | 20 J | 25 J |
| Bio-S | 15.0 | 20.0 | 21.33 | 1.78 | 2.06 | 1.40 | 2214.8 | 2366.9 | 2237.3 |
| Bio-B | 9.27 | 10.7 | 11.74 | 0.68 | 0.66 | 0.62 | 2208.8 | 2166.4 | 2157.2 |
| Bio-N | 15.0 | 19.9 | 20.1 | 1.78 | 1.87 | 1.27 | 1947.7 | 2158.2 | 2230.5 |
| MSP | 13.6 | 13.6 | 11.7 | 1.23 | 0.89 | 0.62 | 7190.1 | 6891.1 | 6002.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, M.; Hu, D.; Pei, B. Performance of 3D-Printed Bionic Conch-Like Composite Plate under Low-Velocity Impact. Materials 2022, 15, 5201. https://doi.org/10.3390/ma15155201
Wan M, Hu D, Pei B. Performance of 3D-Printed Bionic Conch-Like Composite Plate under Low-Velocity Impact. Materials. 2022; 15(15):5201. https://doi.org/10.3390/ma15155201
Chicago/Turabian StyleWan, Mincen, Dayong Hu, and Baoqing Pei. 2022. "Performance of 3D-Printed Bionic Conch-Like Composite Plate under Low-Velocity Impact" Materials 15, no. 15: 5201. https://doi.org/10.3390/ma15155201