
Dynamic Response of Rock-like Materials Based on SHPB Pulse Waveform Characteristics


Abstract
:1. Introduction
2. Micro Model
2.1. Contact Bond Model
2.2. SHPB Model
2.3. Waveform Test
3. Velocity Pulse
3.1. Pulse Waveform
3.2. Different Amplitudes
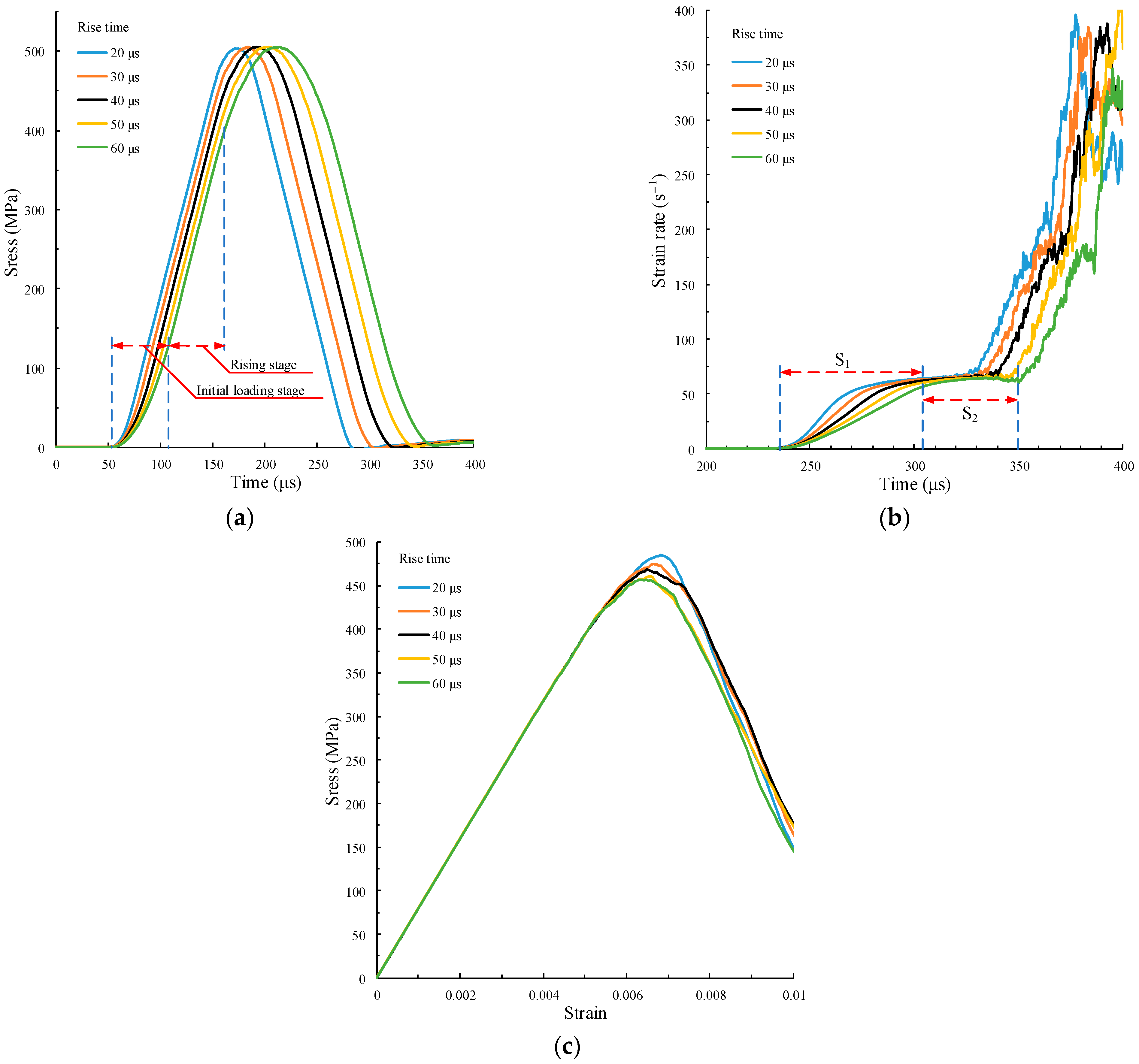
3.3. Different Rise Times
4. Force Pulse
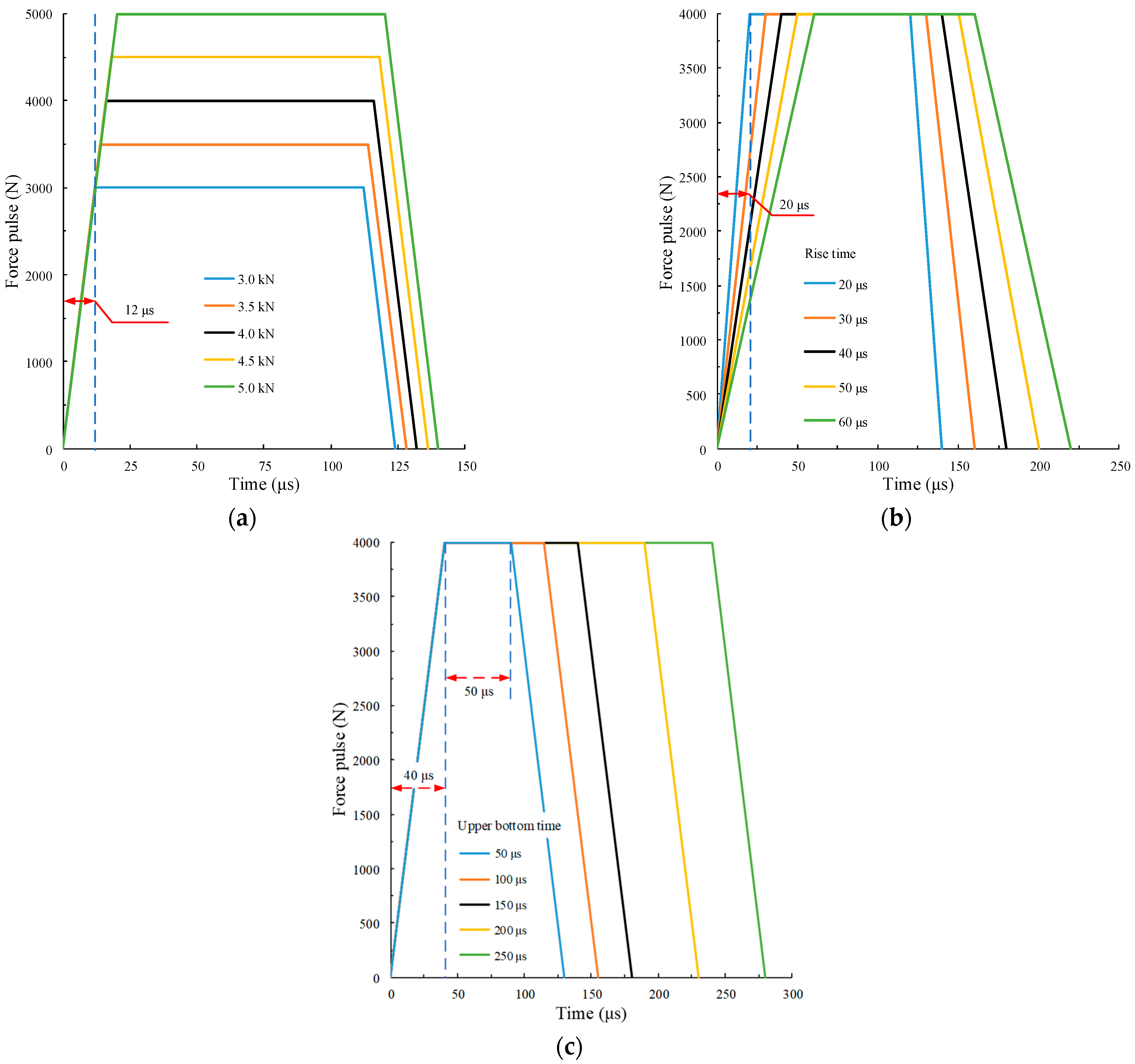
4.1. Pulse Waveform
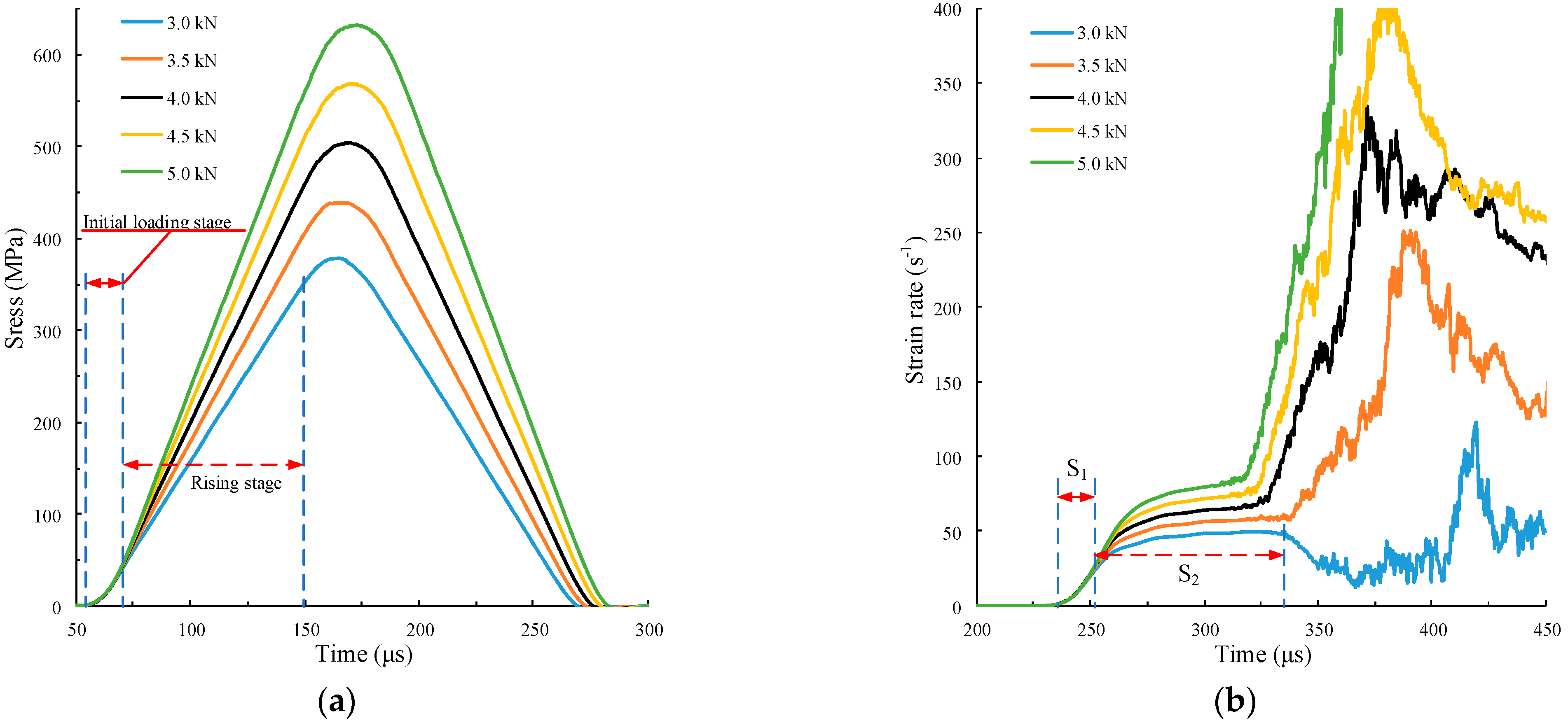
4.2. Different Amplitudes
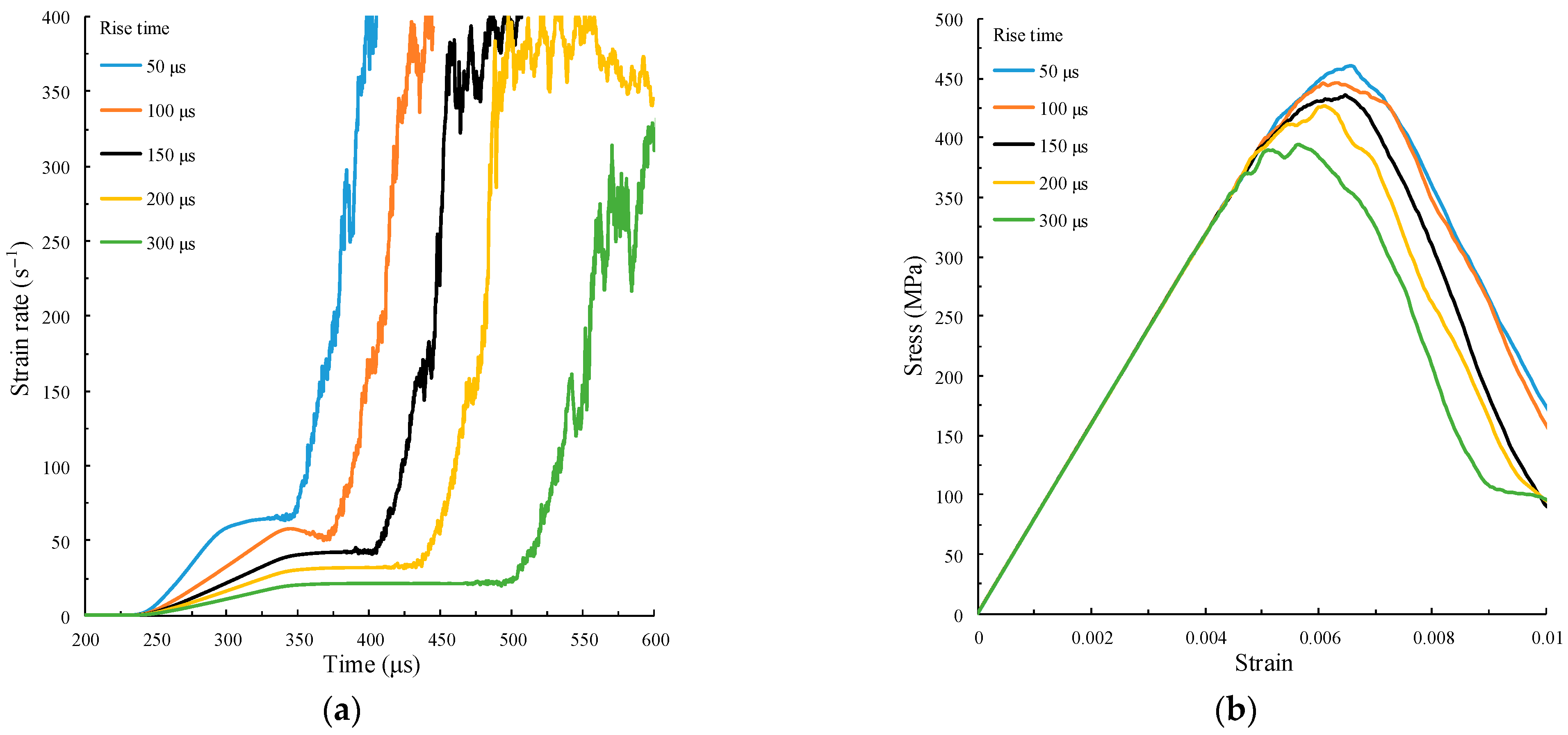
4.3. Different Rise Time
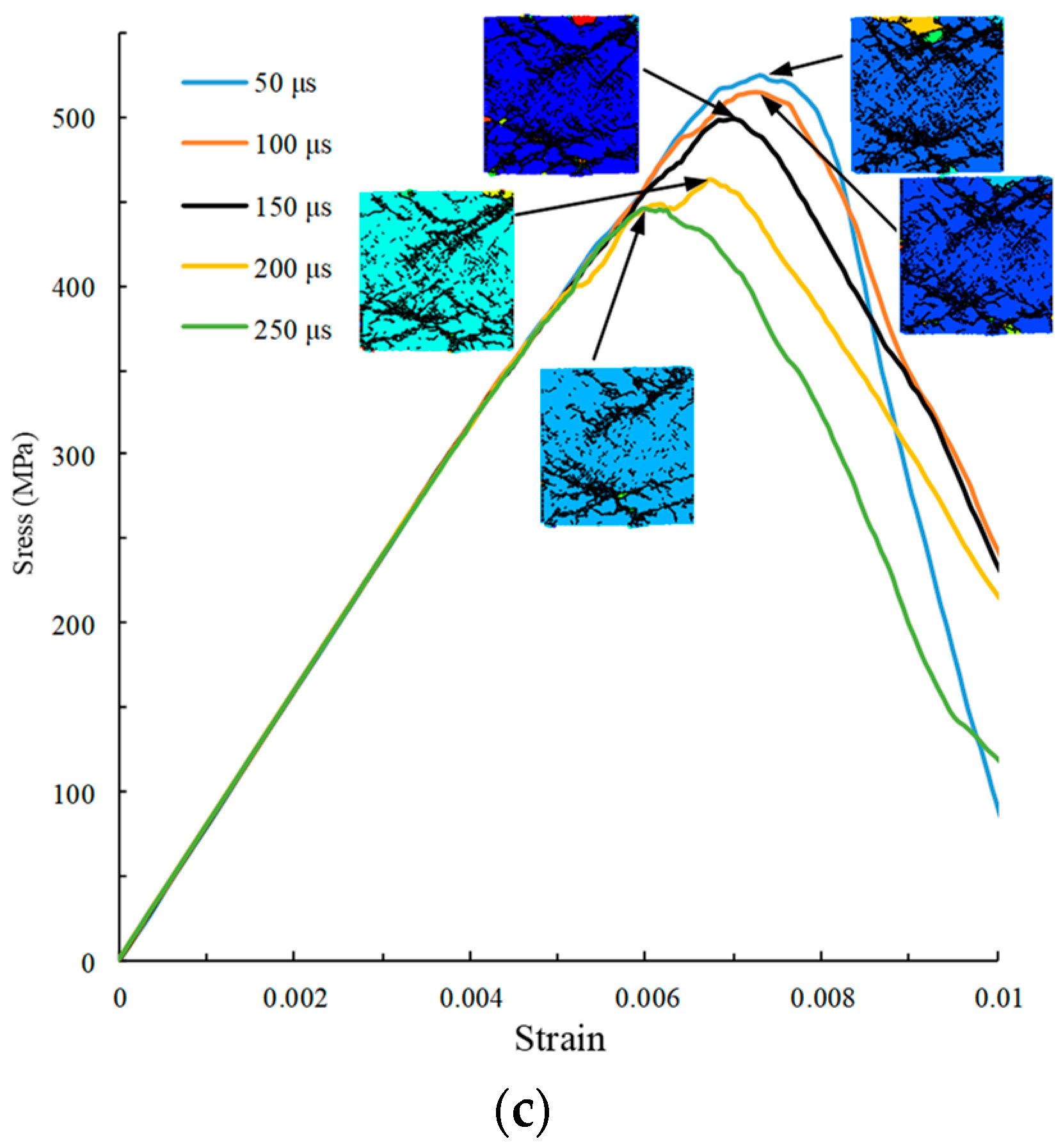
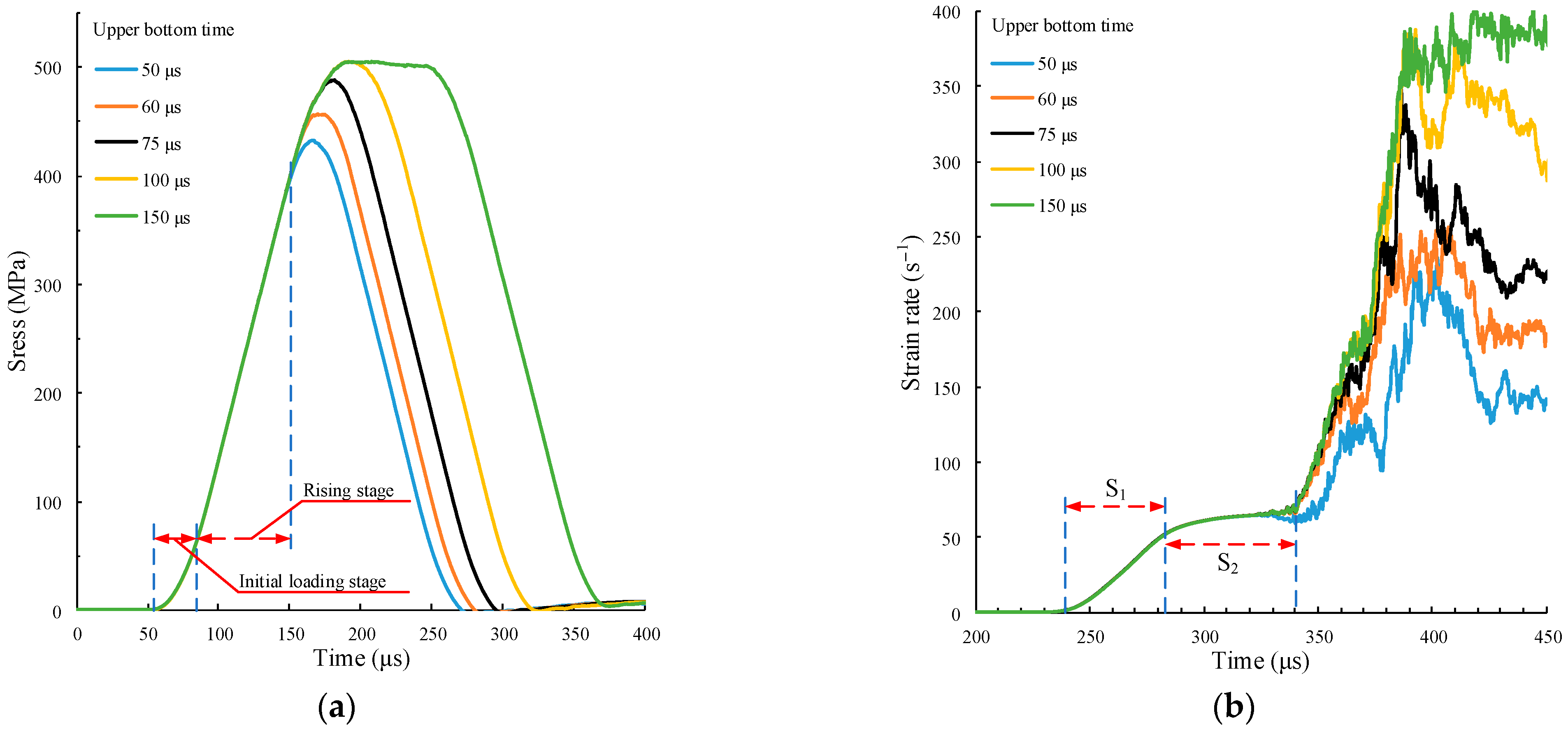
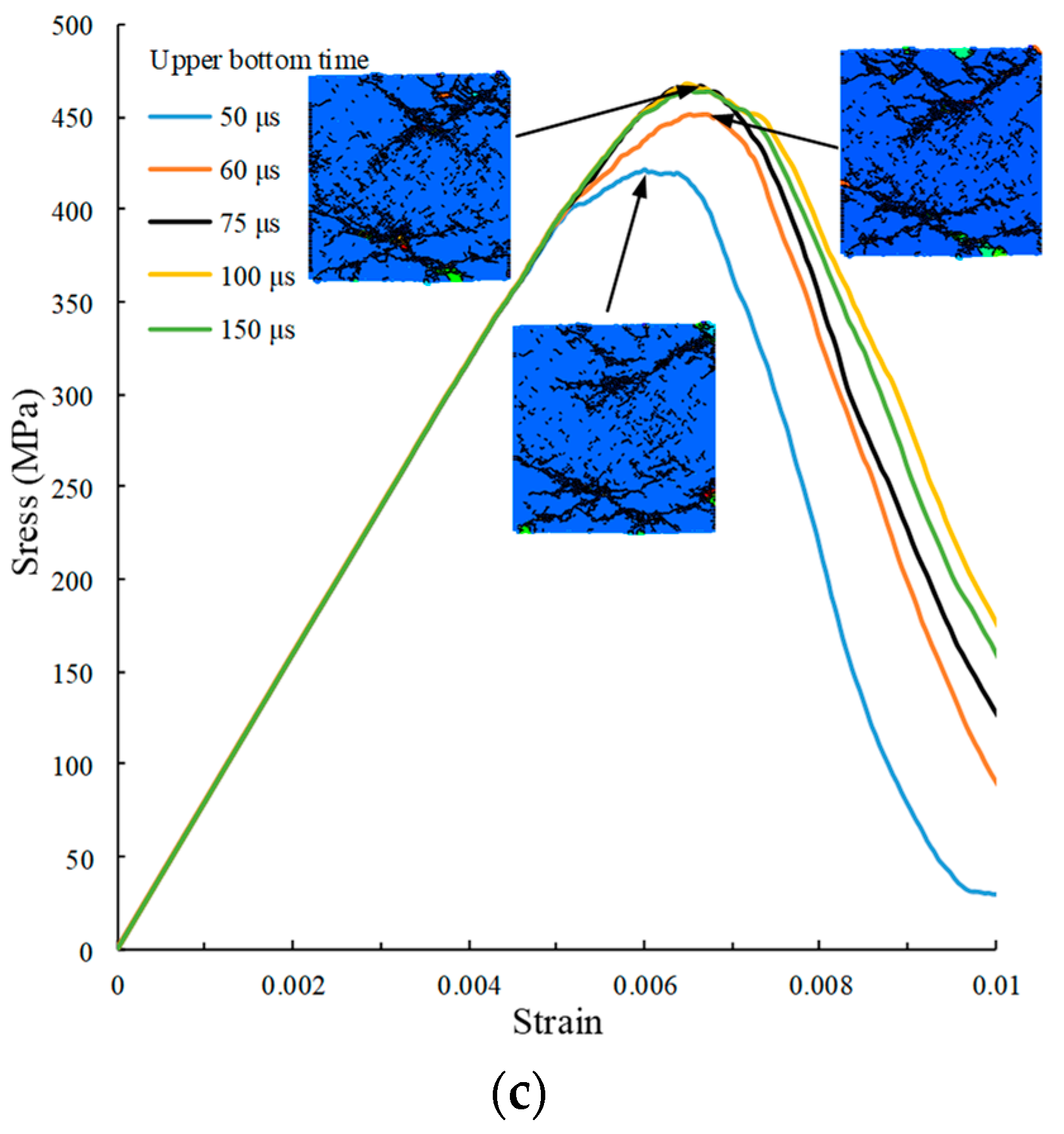
4.4. Different Upper Bottom Times
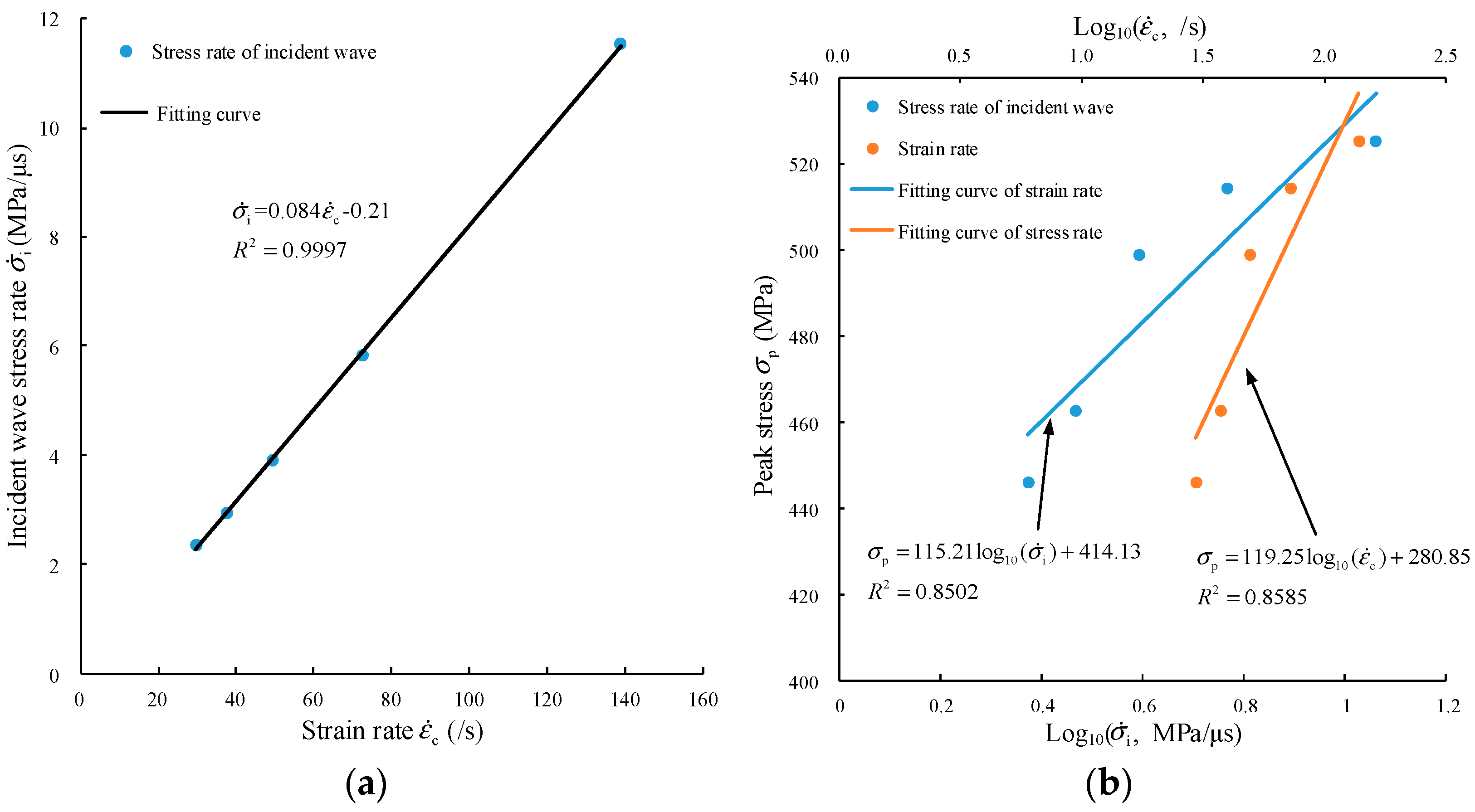
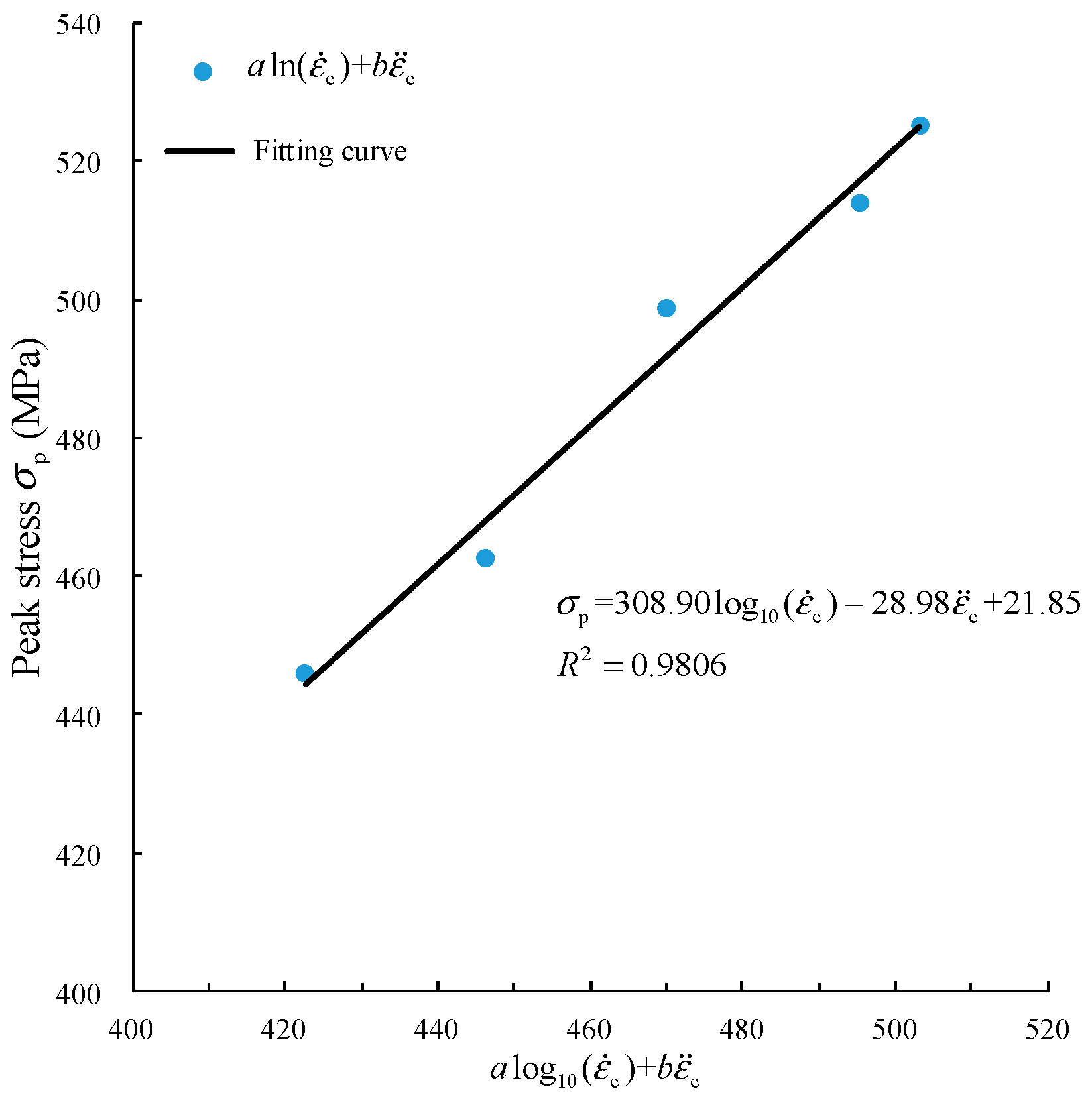
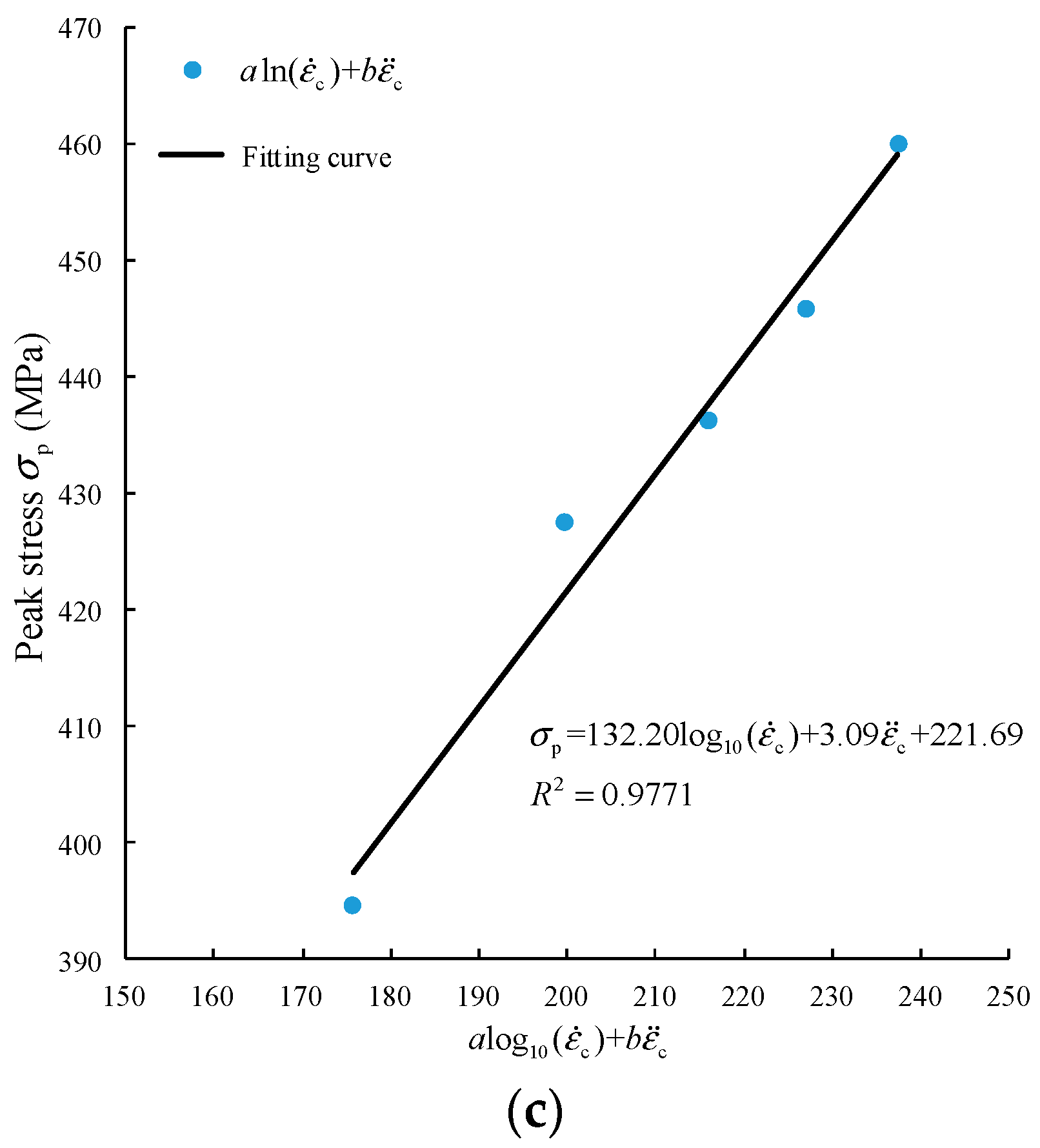
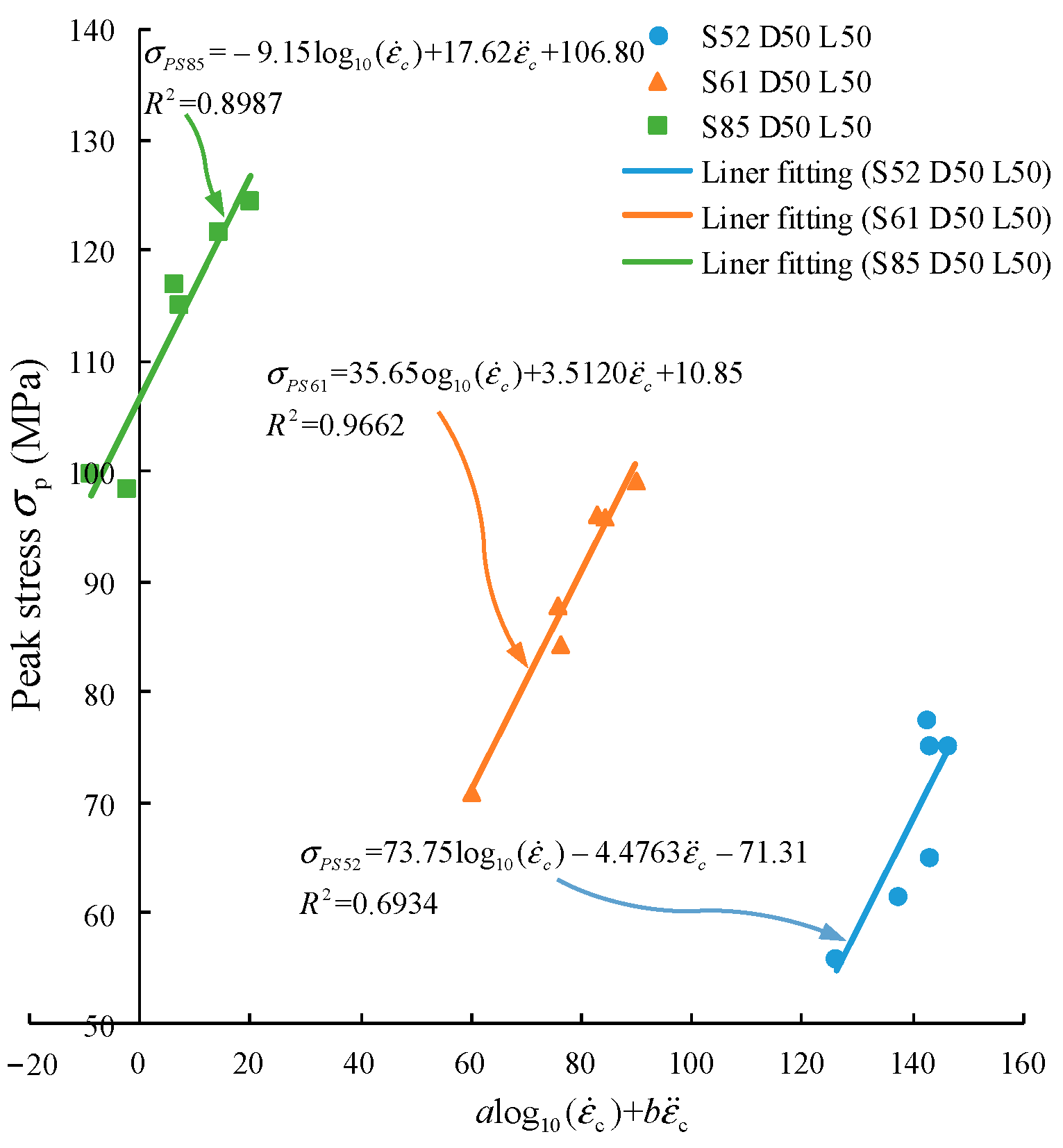
5. Dynamic Strength Prediction Model
6. Discussion
7. Conclusions
- 1.
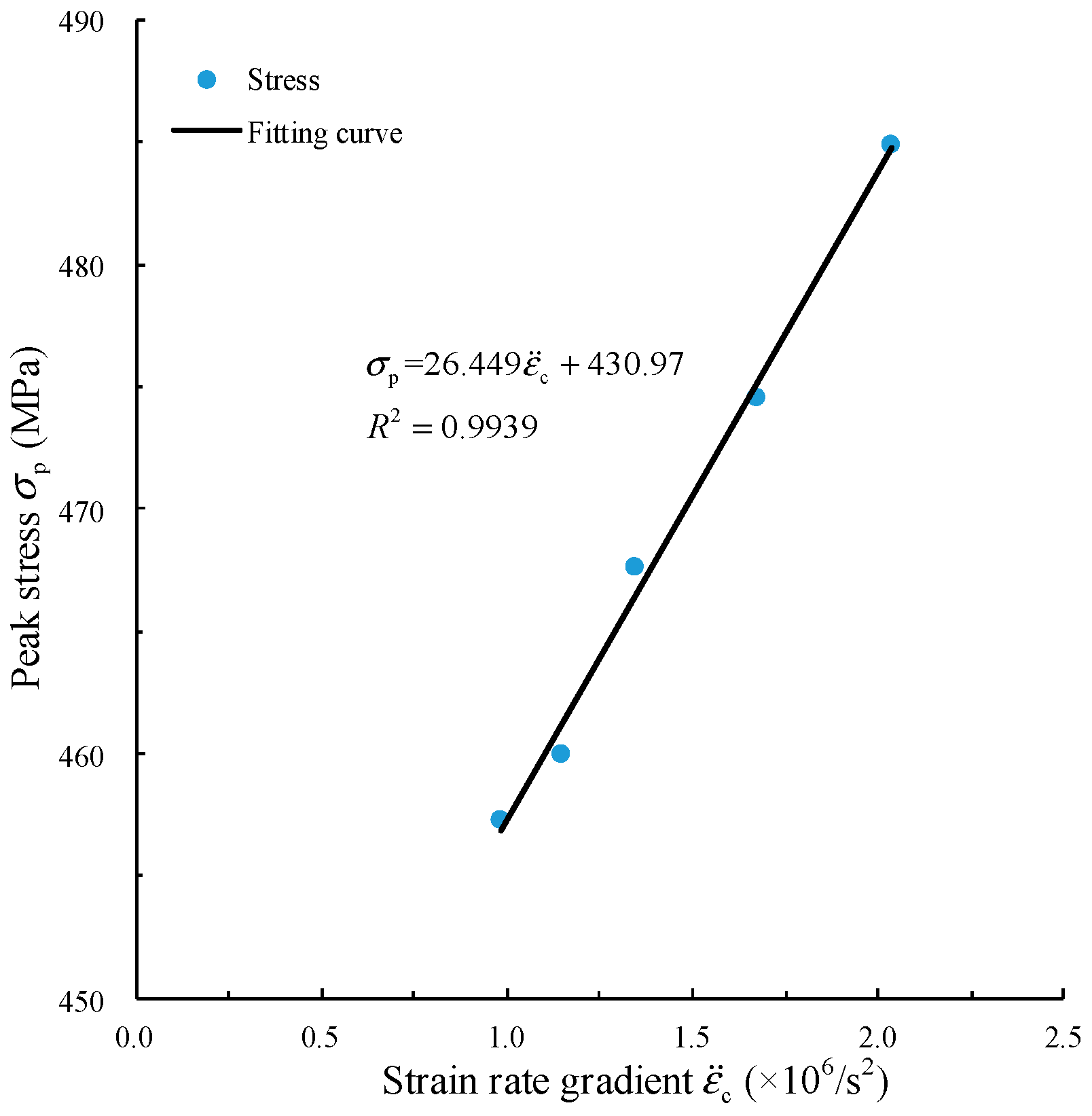
- There is a critical interval of rock dynamic strength. Below the critical interval, the specimen will not be damaged. In the critical interval, the dynamic strength of the specimen is independent of the strain rate but increases with the amplitude of the incident stress wave. When the critical interval is exceeded, the dynamic strength is determined by strain rate and strain rate gradient.
- 2.
- The strain rate of the specimen is only related to the slope of the incident stress wave and is independent of its amplitude. Additionally, the inertia effect cannot be eliminated in SHPB.
- 3.
- The slope of the velocity pulse waveform determines the strain rate of the specimen. The slope of the force pulse waveform determines the strain rate gradient of the specimen, and the upper bottom time determines the strain rate of the specimen. The two pulse types can achieve the same impact effect by controlling the waveform shape.
- 4.
- A dynamic strength prediction model of rock-like brittle materials is proposed. The model considers the effects of strain rate and strain rate gradient and is verified.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, N.; Zhu, Z.; Zhang, C.; Luo, Z. Dynamic behavior of rock joint under different impact loads. KSCE J. Civ. Eng. 2019, 23, 541–548. [Google Scholar] [CrossRef]
- Li, S.H.; Zhu, W.C.; Niu, L.L.; Yu, M.; Chen, C.F. Dynamic characteristics of green sandstone subjected to repetitive impact loading: Phenomena and mechanisms. Rock Mech. Rock Eng. 2018, 51, 1921–1936. [Google Scholar] [CrossRef]
- Wu, N.; Zhu, Z.; Zhou, Y.; Gao, S. A comparative study on rock properties in splitting and compressive dynamic tests. Shock Vib. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Cotsovos, D.M.; Pavlović, M.N. Numerical investigation of concrete subjected to compressive impact loading. Part 2: Parametric investigation of factors affecting behaviour at high loading rates. Comput. Struct. 2008, 86, 164–180. [Google Scholar] [CrossRef]
- Cho, S.H.; Ogata, Y.; Kaneko, K. Strain-rate dependency of the dynamic tensile strength of rock. Int. J. Rock Mech. Min. 2003, 40, 763–777. [Google Scholar] [CrossRef]
- Zhao, J.; Li, H.B. Experimental determination of dynamic tensile properties of a granite. Int. J. Rock Mech. Min. 2000, 37, 861–866. [Google Scholar] [CrossRef]
- Jiang, T.Z.; Xue, P.; Butt, H.S.U. Pulse shaper design for dynamic testing of viscoelastic materials using polymeric SHPB. Int. J. Impact Eng. 2015, 79, 45–52. [Google Scholar] [CrossRef]
- Rong, Z.; Sun, W.; Zhang, Y. Dynamic compression behavior of ultra-high performance cement based composites. Int. J. Impact Eng. 2010, 37, 515–520. [Google Scholar] [CrossRef]
- Malvern, L.E.; Ross, C.A. Dynamic Response of Concrete Andconcrete Structures; Department of Engineering Sciences, Florida University: Gainesville, FL, USA, 1986. [Google Scholar]
- Li, X.B.; Lok, T.S.; Zhao, J.; Zhao, P.J. Oscillation elimination in the Hopkinson bar apparatus and resultant complete dynamic stress–strain curves for rocks. Int. J. Rock Mech. Min. 2000, 37, 1055–1060. [Google Scholar] [CrossRef]
- Lee, O.S.; Kim, S.H.; Han, Y.H. Thickness effect of pulse shaper on dynamic stress equilibrium and dynamic deformation behavior in the polycarbonate using SHPB technique. J. Exp. Mech. 2006, 21, 51–60. [Google Scholar] [CrossRef]
- Chen, W.; Luo, H.; Abadie, C. Dynamic compressive responses of intact and damaged ceramics from a single Split Hopkinson pressure bar experiment. Exp. Mech. 2004, 44, 295–299. [Google Scholar] [CrossRef]
- Yang, G.; Chen, X.; Xuan, W.; Chen, Y. Dynamic compressive and splitting tensile properties of concrete containing recycled tyre rubber under high strain rates. Sādhanā 2018, 43, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Luo, G.; Wu, C.; Xu, K.; Liu, L.; Chen, W. Development of dynamic constitutive model of epoxy resin considering temperature and strain rate effects using experimental methods. Mech. Mater. 2021, 159, 1–15. [Google Scholar] [CrossRef]
- Jiang, J.; Xu, J.; Zhang, Z.; Chen, X. Rate-dependent compressive behavior of EPDM insulation: Experimental and constitutive analysis. Mech. Mater. 2016, 96, 30–38. [Google Scholar] [CrossRef]
- Bagher Shemirani, A.; Naghdabadi, R.; Ashrafi, M.J. Experimental and numerical study on choosing proper pulse shapers for testing concrete specimens by Split Hopkinson pressure bar apparatus. Constr. Build. Mater. 2016, 125, 326–336. [Google Scholar] [CrossRef]
- Vecchio, K.S.; Jiang, F. Improved pulse shaping to achieve constant strain rate and stress equilibrium in Split-Hopkinson pressure bar testing. Metall. Mater. Trans. A 2007, 38, 2655–2665. [Google Scholar] [CrossRef]
- Frew, D.J.; Forrestal, M.J.; Chen, W. Pulse shaping techniques for testing brittle materials with a Split Hopkinson pressure bar. Exp. Mech. 2002, 42, 93–106. [Google Scholar] [CrossRef]
- Sun, B.; Ping, Y.; Zhu, Z.; Jiang, Z.; Wu, N. Experimental study on the dynamic mechanical properties of large-diameter mortar and concrete subjected to cyclic impact. Shock Vib. 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Sun, H.; Wu, S. Transient dynamic behavior of polypropylene fiber reinforced mortar under compressive impact loading. Constr. Build. Mater. 2016, 111, 30–40. [Google Scholar] [CrossRef]
- Lok, T.S.; Li, X.B.; Liu, D.; Zhao, P.J. Testing and response of large diameter brittle materials subjected to high strain rate. J. Mater. Civ. Eng. 2002, 14, 262–269. [Google Scholar] [CrossRef]
- Dai, F.; Xu, Y.; Zhao, T.; Xu, N. Loading-rate-dependent progressive fracturing of cracked chevron- notched Brazilian disc specimens in Split Hopkinson pressure bar tests. Int. J. Rock Mech. Min. 2016, 88, 49–60. [Google Scholar] [CrossRef]
- Zhou, Z.; Jiang, Y.; Zou, Y.; Wong, L. Degradation mechanism of rock under impact loadings by integrated investigation on crack and damage development. J. Cent. South Univ. 2014, 21, 4646–4652. [Google Scholar] [CrossRef]
- Kucewicz, M.; Baranowski, P.; Małachowski, J. Dolomite fracture modeling using the Johnson-Holmquist concrete material model: Parameter determination and validation. J. Rock Mech. Geotech. Eng. 2021, 13, 335–350. [Google Scholar] [CrossRef]
- Jankowiak, T.; Rusinek, A.; Voyiadjis, G.Z. Modeling and design of SHPB to characterize brittle materials under compression for high strain rates. Materials 2020, 13, 2191. [Google Scholar] [CrossRef]
- Baranowski, P.; Janiszewski, J.; Malachowski, J. Study on computational methods applied to modelling of pulse shaper in Split-Hopkinson bar. Arch. Mech. 2014, 66, 429–452. [Google Scholar]
- Comite Euro-International du Beton. CEB-FIP Model Code 1990; Redwood Books: Trowbridge, Wiltshire, UK, 1993. [Google Scholar]
- Zhou, J.; Ge, L. Effect of strain rate and water-to-cement ratio on compressive mechanical behavior of cement mortar. J. Cent. South Univ. 2015, 22, 1087–1095. [Google Scholar] [CrossRef]
- Joo Kim, D.; Sirijaroonchai, K.; El-Tawil, S.; Naaman, A.E. Numerical simulation of the Split Hopkinson pressure bar test technique for concrete under compression. Int. J. Impact. Eng. 2010, 37, 141–149. [Google Scholar] [CrossRef]
- Hao, Y.; Hao, H.; Jiang, G.P.; Zhou, Y. Experimental confirmation of some factors influencing dynamic concrete compressive strengths in high-speed impact tests. Cem. Concr. Res. 2013, 52, 63–70. [Google Scholar] [CrossRef]
- Hamdia, K.M.; Msekh, M.A.; Silani, M.; Vu-Bac, N.; Zhuang, X.; Nguyen-Thoi, T.; Rabczuk, T. Uncertainty quantification of the fracture properties of polymeric nanocomposites based on phase field modeling. Compos. Struct. 2015, 133, 1177–1190. [Google Scholar] [CrossRef]
- Xing, H.Z.; Zhang, Q.B.; Ruan, D.; Dehkhoda, S.; Lu, G.X.; Zhao, J. Full-field measurement and fracture characterisations of rocks under dynamic loads using high-speed three-dimensional digital image correlation. Int. J. Impact. Eng. 2018, 113, 61–72. [Google Scholar] [CrossRef]
- Rossi, P.; Toutlemonde, F. Effect of loading rate on the tensile behaviour of concrete: Description of the physical mechanisms. Mater. Struct. 1996, 29, 116–172. [Google Scholar] [CrossRef]
- Kipp, M.E.; Grady, D.E.; Chen, E.P. Strain-rate dependent fracture initiation. Int. J. Fract. 1980, 16, 471–478. [Google Scholar] [CrossRef]
- Guo, Y.B.; Gao, G.F.; Jing, L.; Shim, V.P.W. Response of high-strength concrete to dynamic compressive loading. Int. J. Impact Eng. 2017, 108, 114–135. [Google Scholar] [CrossRef]
- Zhou, X.Q.; Hao, H. Modelling of compressive behaviour of concrete-like materials at high strain rate. Int. J. Solids Struct. 2008, 45, 4648–4661. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Wang, G.; Du, X.; Wang, Y. A nonlinear dynamic uniaxial strength criterion that considers the ultimate dynamic strength of concrete. Int. J. Impact Eng. 2017, 103, 124–137. [Google Scholar] [CrossRef]
- Xie, Y.; Fu, Q.; Zheng, K.; Yuan, Q.; Song, H. Dynamic mechanical properties of cement and asphalt mortar based on SHPB test. Constr. Build. Mater. 2014, 70, 217–225. [Google Scholar] [CrossRef]
- Xu, H.; Wen, H.M. Semi-empirical equations for the dynamic strength enhancement of concrete-like materials. Int. J. Impact Eng. 2013, 60, 76–81. [Google Scholar] [CrossRef]
- Li, Q.M.; Meng, H. About the dynamic strength enhancement of concrete-like materials in a Split Hopkinson pressure bar test. Int. J. Solids Struct. 2003, 40, 343–360. [Google Scholar] [CrossRef]
- Katayama, M.; Itoh, M.; Tamura, S.; Beppu, M.; Ohno, T. Numerical analysis method for the RC and geological structures subjected to extreme loading by energetic materials. Int. J. Impact Eng. 2007, 34, 1546–1561. [Google Scholar] [CrossRef]
- Hao, Y.; Zhang, X.; Hao, H. Numerical analysis of concrete material properties at high strain rate under direct tension. Procedia Eng. 2011, 14, 336–343. [Google Scholar] [CrossRef] [Green Version]
- Hao, Y.; Hao, H.; Li, Z.X. Influence of end friction confinement on impact tests of concrete material at high strain rate. Int. J. Impact Eng. 2013, 60, 82–106. [Google Scholar] [CrossRef]
- Hao, Y.; Hao, H. Numerical evaluation of the influence of aggregates on concrete compressive strength at high strain rate. Int. J. Prot. Struct. 2011, 2, 177–206. [Google Scholar] [CrossRef]
- Al-Salloum, Y.; Almusallam, T.; Ibrahim, S.M.; Abbas, H.; Alsayed, S. Rate dependent behavior and modeling of concrete based on SHPB experiments. Cem. Concr. Compos. 2015, 55, 34–44. [Google Scholar] [CrossRef]
- Kim, K.; Lee, S.; Cho, J. Effect of maximum coarse aggregate size on dynamic compressive strength of high-strength concrete. Int. J. Impact Eng. 2019, 125, 107–116. [Google Scholar] [CrossRef]
- Lee, S.; Kim, K.; Park, J.; Cho, J. Pure rate effect on the concrete compressive strength in the Split Hopkinson pressure bar test. Int. J. Impact Eng. 2018, 113, 191–202. [Google Scholar] [CrossRef]
- Itasca Consulting Group Inc. PFC2D (Particle Flow Code in 2D) Theory and Background; Itasca Consulting Group Inc.: Minneapolis, MN, USA, 2008. [Google Scholar]
- Yang, S.Q.; Tian, W.L.; Huang, Y.H.; Ranjith, P.G.; Ju, Y. An experimental and numerical study on cracking behavior of brittle sandstone containing two non-coplanar fissures under uniaxial compression. Rock Mech. Rock Eng. 2016, 49, 1497–1515. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhao, Y.; Jiang, Y.; Zou, Y.; Cai, X.; Li, D. Dynamic behavior of rock during its post failure stage in SHPB tests. Trans. Nonferrous Met. Soc. China 2017, 27, 184–196. [Google Scholar] [CrossRef]
- Li, X.; Zou, Y.; Zhou, Z. Numerical simulation of the rock SHPB test with a special shape striker based on the discrete element method. Rock Mech. Rock Eng. 2014, 47, 1693–1709. [Google Scholar] [CrossRef]
- Qin, C.; Zhang, C. Numerical study of dynamic behavior of concrete by meso-scale particle element modeling. Int. J. Impact Eng. 2011, 38, 1011–1021. [Google Scholar] [CrossRef]
- Qiu, J.; Li, D.; Li, X.; Zhou, Z. Dynamic fracturing behavior of layered rock with different inclination angles in SHPB tests. Shock Vib. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Potyondy, D.O.; Cundall, P.A. A bonded-particle model for rock. Int. J. Rock Mech. Min. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Du, H.; Dai, F.; Xu, Y.; Liu, Y.; Xu, H. Numerical investigation on the dynamic strength and failure behavior of rocks under hydrostatic confinement in SHPB testing. Int. J. Rock Mech. Min. 2018, 108, 43–57. [Google Scholar] [CrossRef]
- Gorham, D.A. Specimen inertia in high strain-rate compression. J. Physics. D Appl. Phys. 1989, 22, 1888–1893. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Particle Radius (mm) | Density (kg·m−3) | Effective Modulus (GPa) | Normal-to-Shear Stiffness Ratio | Shear Strength (MPa) | Tensile Strength (MPa) |
|---|---|---|---|---|---|---|
| Steel bar | 0.8–0.96 | 7800 | 300 | 3.0 | 1 × 10100 | 1 × 10100 |
| Specimen | 0.3–0.36 | 2500 | 63 | 2.0 | 135 | 135 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Chen, R.; Ping, Y.; Zhu, Z.; Wu, N.; He, Y. Dynamic Response of Rock-like Materials Based on SHPB Pulse Waveform Characteristics. Materials 2022, 15, 210. https://doi.org/10.3390/ma15010210
Sun B, Chen R, Ping Y, Zhu Z, Wu N, He Y. Dynamic Response of Rock-like Materials Based on SHPB Pulse Waveform Characteristics. Materials. 2022; 15(1):210. https://doi.org/10.3390/ma15010210
Chicago/Turabian StyleSun, Bi, Rui Chen, Yang Ping, Zhende Zhu, Nan Wu, and Yanxin He. 2022. "Dynamic Response of Rock-like Materials Based on SHPB Pulse Waveform Characteristics" Materials 15, no. 1: 210. https://doi.org/10.3390/ma15010210