Author Contributions
Conceptualization, B.S., T.P. and A.G.; methodology, T.P.; software, B.S.; validation, T.P. and B.S.; formal analysis, B.S.; investigation, B.S.; resources, T.P. and A.G.; data curation, B.S. and T.P.; writing—original draft preparation, B.S.; writing—review and editing, T.P. and A.G.; visualization, B.S. and T.P.; supervision, A.G.; project administration, T.P.; funding acquisition, A.G. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Scheme of impact-echo method with an example of waveform time-domain spectrum and corresponding frequency spectrum when defect in concrete is observed.
Figure 1.
Scheme of impact-echo method with an example of waveform time-domain spectrum and corresponding frequency spectrum when defect in concrete is observed.
Figure 2.
Isometric view of Finite Element Models (a) model of 50 cm × 50 cm × 7 cm plate for validation; (b) model of infinitely large slab for layout testing.
Figure 2.
Isometric view of Finite Element Models (a) model of 50 cm × 50 cm × 7 cm plate for validation; (b) model of infinitely large slab for layout testing.
Figure 3.
Frequency spectra of measurements taken at a large span floor in distance of 10 cm, 60 cm and 90 cm from impactor; frequency due to thickness marked with dashed line.
Figure 3.
Frequency spectra of measurements taken at a large span floor in distance of 10 cm, 60 cm and 90 cm from impactor; frequency due to thickness marked with dashed line.
Figure 4.
The plate with void: (a) view and (b) section.
Figure 4.
The plate with void: (a) view and (b) section.
Figure 5.
Square measurement system layout: (a) isometric and (b) top views.
Figure 5.
Square measurement system layout: (a) isometric and (b) top views.
Figure 6.
Frequency spectra, solid plate; expected frequency marked with dashed line.
Figure 6.
Frequency spectra, solid plate; expected frequency marked with dashed line.
Figure 7.
Scheme of void and IE device layout.
Figure 7.
Scheme of void and IE device layout.
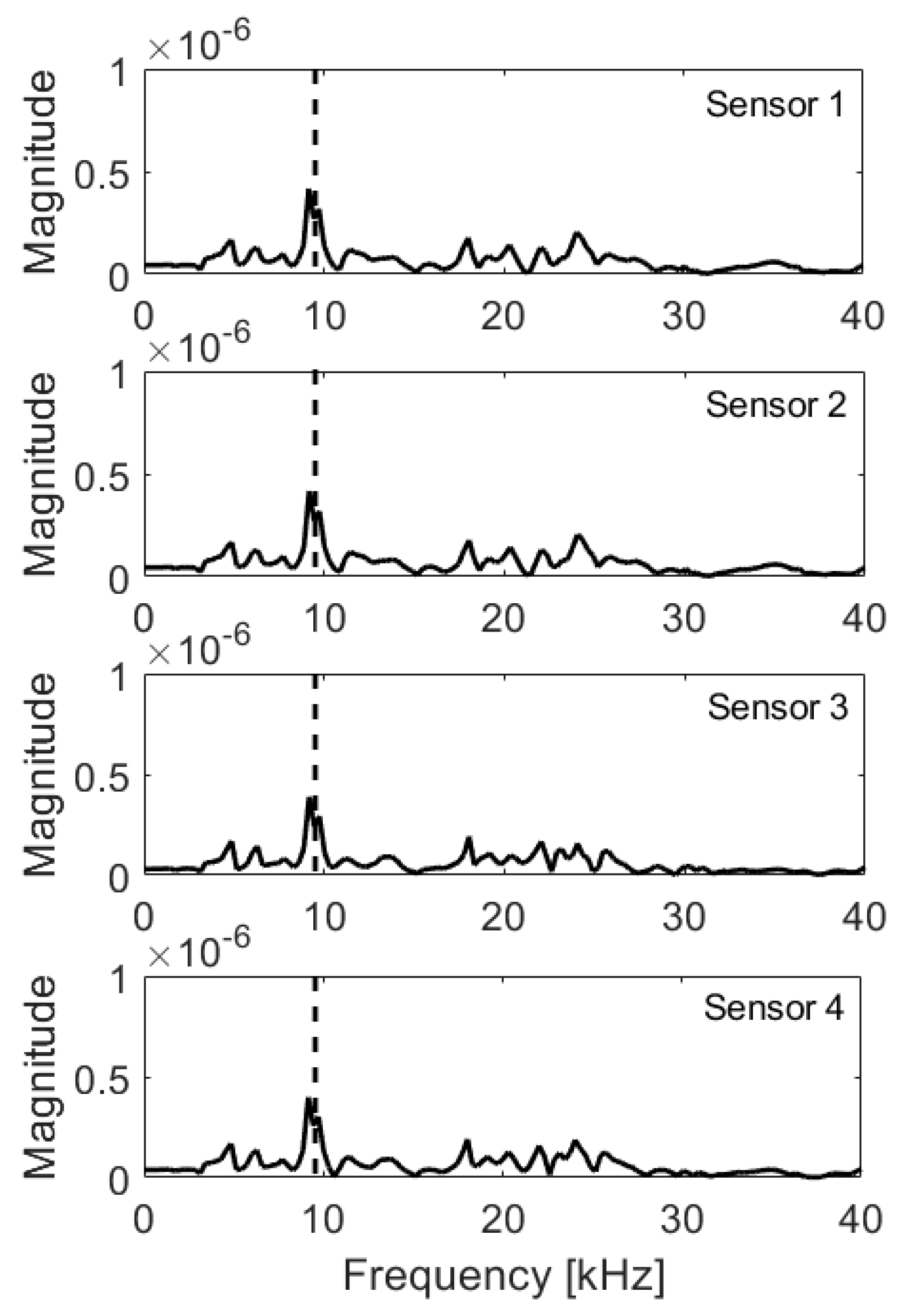
Figure 8.
Frequency spectra, void below impactor; expected frequency marked with dashed line.
Figure 8.
Frequency spectra, void below impactor; expected frequency marked with dashed line.
Figure 9.
Scheme of void and IE device layout, void below sensor 1.
Figure 9.
Scheme of void and IE device layout, void below sensor 1.
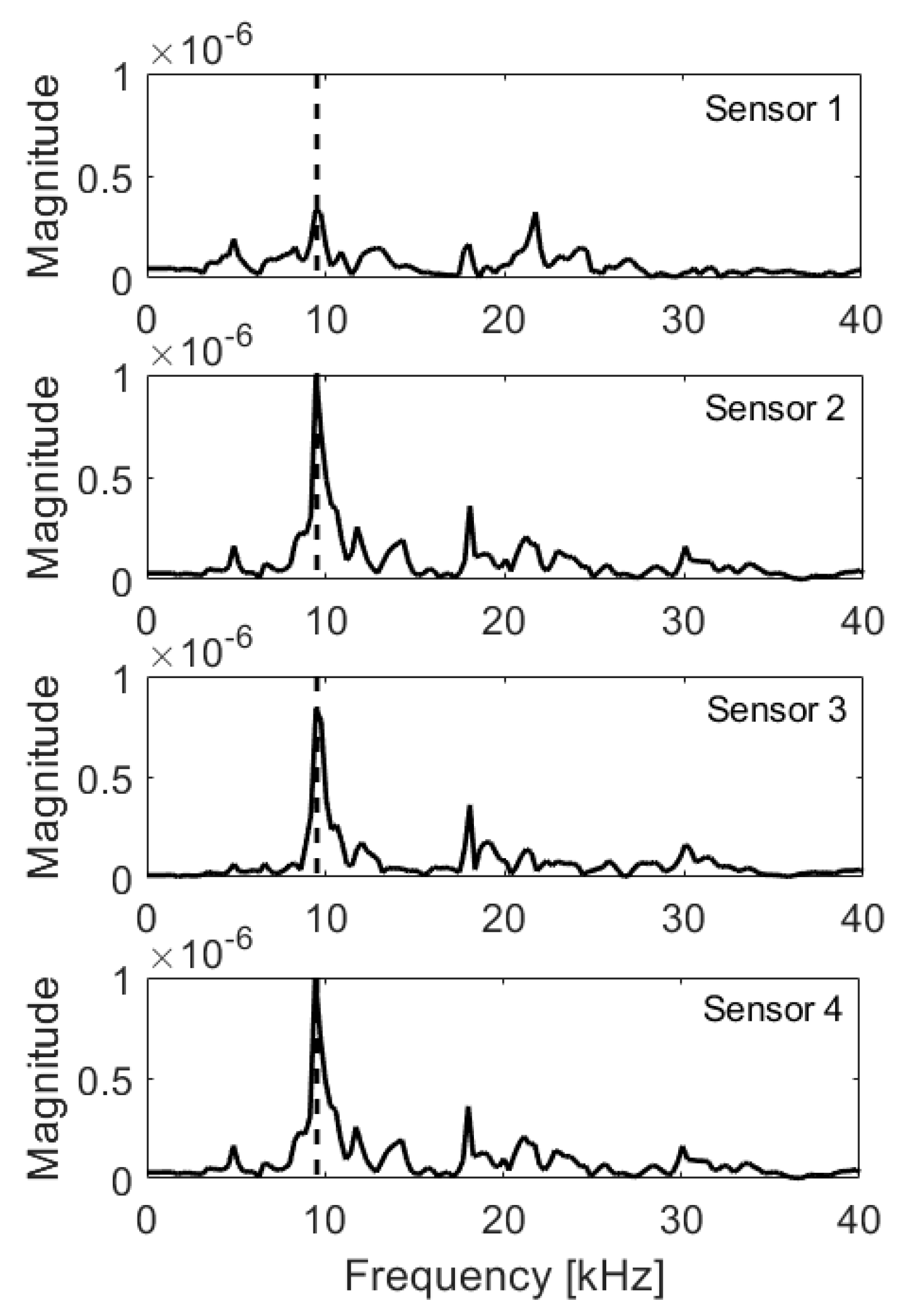
Figure 10.
Frequency spectra, void below sensor 1; expected frequency marked with dashed line.
Figure 10.
Frequency spectra, void below sensor 1; expected frequency marked with dashed line.
Figure 11.
Scheme of void and IE device layout, edge below impactor.
Figure 11.
Scheme of void and IE device layout, edge below impactor.
Figure 12.
Frequency spectra, edge below impactor; expected frequency marked with dashed line.
Figure 12.
Frequency spectra, edge below impactor; expected frequency marked with dashed line.
Figure 13.
Scheme of void and IE device layout, edge 5 cm from impactor.
Figure 13.
Scheme of void and IE device layout, edge 5 cm from impactor.
Figure 14.
Frequency spectra, edge 5 cm from impactor; expected frequency marked with dashed line.
Figure 14.
Frequency spectra, edge 5 cm from impactor; expected frequency marked with dashed line.
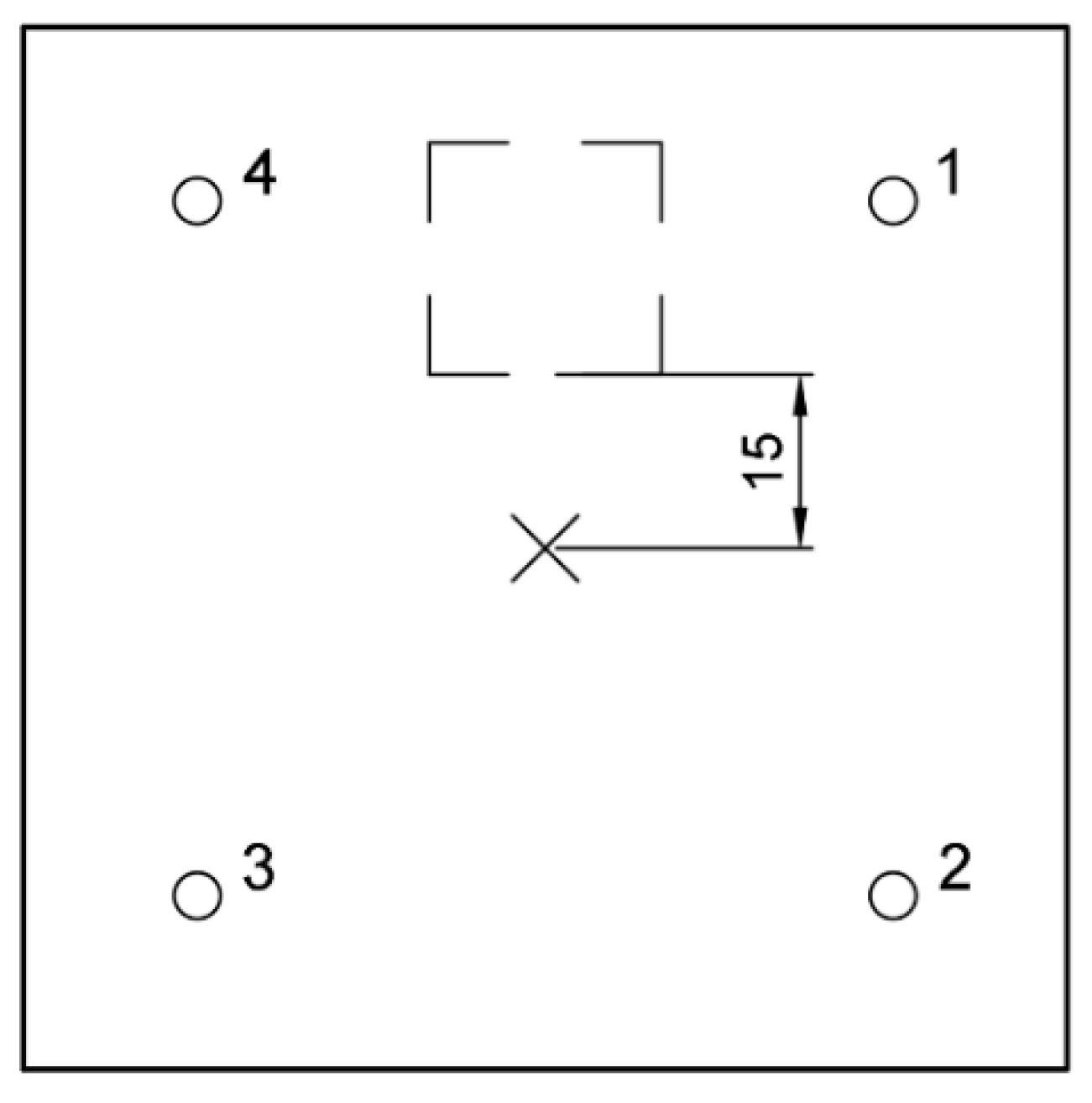
Figure 15.
Scheme of void and IE device layout, edge 15 cm from impactor.
Figure 15.
Scheme of void and IE device layout, edge 15 cm from impactor.
Figure 16.
Frequency spectra, edge 15 cm from impactor; expected frequency marked with dashed line.
Figure 16.
Frequency spectra, edge 15 cm from impactor; expected frequency marked with dashed line.
Figure 17.
RMS of signal received by each transducer with change of void edge distance from impact point.
Figure 17.
RMS of signal received by each transducer with change of void edge distance from impact point.
Figure 18.
UIR-Scanner (a prototype) for nondestructive testing using complementary NDT methods: GPR (Ground Penetrating Radar), IE (Impact-Echo) and UPV (Ultrasonic Pulse Velocity) equipped with computer systems for signal analysis.
Figure 18.
UIR-Scanner (a prototype) for nondestructive testing using complementary NDT methods: GPR (Ground Penetrating Radar), IE (Impact-Echo) and UPV (Ultrasonic Pulse Velocity) equipped with computer systems for signal analysis.
Figure 19.
Impact-Echo module integrated into scanner.
Figure 19.
Impact-Echo module integrated into scanner.
Table 1.
Expected peaks for plate with voids (Cpp = 3834 m/s).
Table 1.
Expected peaks for plate with voids (Cpp = 3834 m/s).
| Depth [cm] | Frequency [kHz] |
|---|
| 9 | 21.3 |
| 11 | 17.4 |
| 20 | 9.6 |
Table 2.
Integral and RMS of frequency spectrum, solid plate.
Table 2.
Integral and RMS of frequency spectrum, solid plate.
| Sensor N° | Integral (10−6) | Δ [%] | RMS (10−7) | Δ [%] | Detected? |
|---|
| 1 | 3.616 | 3 | 1.537 | 2 | N |
| 2 | 3.521 | 0 | 1.515 | 0 | N |
| 3 | 3.436 | 2 | 1.481 | 2 | N |
| 4 | 3.521 | 0 | 1.515 | 0 | N |
| Mean (RV 1) | 3.523 | - | 1.512 | - | - |
Table 3.
Integral and RMS of frequency spectrum, void below impactor.
Table 3.
Integral and RMS of frequency spectrum, void below impactor.
| Sensor N° | Integral (10−6) | Δ [%] | RMS (10−7) | Δ [%] | Detected? |
|---|
| 1 | 2.657 | 25 | 0.872 | 42 | Y |
| 2 | 2.473 | 30 | 0.832 | 45 | Y |
| 3 | 2.331 | 34 | 0.791 | 48 | Y |
| 4 | 2.473 | 30 | 0.833 | 45 | Y |
Table 4.
Integral and RMS of frequency spectrum, void below sensor 1.
Table 4.
Integral and RMS of frequency spectrum, void below sensor 1.
| Sensor N° | Integral (10−6) | Δ [%] | RMS (10−7) | Δ [%] | Detected? |
|---|
| 1 | 2.686 | 24 | 0.891 | 41 | Y |
| 2 | 3.549 | 1 | 1.510 | 0 | N |
| 3 | 2.838 | 19 | 1.300 | 14 | Y |
| 4 | 3.549 | 1 | 1.510 | 0 | N |
Table 5.
Integral and RMS of frequency spectrum, edge below impactor.
Table 5.
Integral and RMS of frequency spectrum, edge below impactor.
| Sensor N° | Integral (10−6) | Δ [%] | RMS (10−7) | Δ [%] | Detected? |
|---|
| 1 | 2.812 | 20 | 0.989 | 34 | Y |
| 2 | 2.632 | 25 | 0.874 | 42 | Y |
| 3 | 2.445 | 30 | 0.858 | 43 | Y |
| 4 | 2.617 | 26 | 0.971 | 36 | Y |
Table 6.
Integral and RMS of frequency spectrum, edge below impactor.
Table 6.
Integral and RMS of frequency spectrum, edge below impactor.
| Sensor N° | Integral (10−6) | Δ [%] | RMS (10−7) | Δ [%] | Detected? |
|---|
| 1 | 2.816 | 20 | 1.113 | 26 | Y |
| 2 | 2.490 | 29 | 0.886 | 41 | Y |
| 3 | 2.445 | 30 | 0.884 | 41 | Y |
| 4 | 2.698 | 23 | 1.103 | 27 | Y |
Table 7.
Integral and RMS of frequency spectrum, edge below impactor.
Table 7.
Integral and RMS of frequency spectrum, edge below impactor.
| Sensor N° | Integral (10−6) | Δ [%] | RMS (10−7) | Δ [%] | Detected? |
|---|
| 1 | 3.230 | 8 | 1.407 | 7 | N |
| 2 | 3.206 | 9 | 1.219 | 20 | W |
| 3 | 3.178 | 10 | 1.203 | 20 | Y |
| 4 | 3.179 | 10 | 1.404 | 7 | W |
Table 8.
Integral of frequency spectrum (10−1), slab with no void.
Table 8.
Integral of frequency spectrum (10−1), slab with no void.
| Sensor N° | Measurement |
|---|
| | A | B | C | D | E | F | G |
|---|
| 1 | 1.4604 | 1.7889 | 1.6837 | 0.8747 | 1.4098 | 1.6977 | 1.3303 |
| 2 | 1.7374 | 0.8333 | 1.6095 | 1.8303 | 1.1254 | 2.3219 | 0.9677 |
| 3 | 1.0635 | 1.2686 | 1.2494 | 1.1608 | 1.7251 | 1.4504 | 2.2510 |
| 4 | 1.1031 | 1.9778 | 1.1016 | 0.8069 | 1.1877 | 1.6299 | 1.5897 |
Table 9.
RMS of frequency spectrum (10−3), slab with no void.
Table 9.
RMS of frequency spectrum (10−3), slab with no void.
| Sensor N° | Measurement |
|---|
| | A | B | C | D | E | F | G |
|---|
| 1 | 2.7935 | 3.4939 | 3.3806 | 1.6329 | 2.7753 | 3.6157 | 3.1040 |
| 2 | 3.3197 | 1.5470 | 3.0592 | 3.6199 | 2.1701 | 5.0211 | 1.7858 |
| 3 | 2.6369 | 3.5801 | 2.6805 | 2.4723 | 3.9014 | 3.4583 | 4.8312 |
| 4 | 2.7986 | 5.0711 | 2.4122 | 2.0223 | 2.7992 | 3.9092 | 3.7139 |
Table 10.
Integral of frequency spectrum (10−1), slab with void below impactor.
Table 10.
Integral of frequency spectrum (10−1), slab with void below impactor.
| Sensor N° | Measurement |
|---|
| | A | B | C | D | E | F | G |
|---|
| 1 | 1.1421 | 1.0405 | 0.8709 | 0.9281 | 1.5843 | 0.9358 | 0.9063 |
| 2 | 1.1993 | 1.0262 | 1.5378 | 1.2899 | 0.8842 | 2.0402 | 1.0260 |
| 3 | 0.8347 | 1.0381 | 1.0210 | 0.9872 | 0.6384 | 1.5853 | 1.1728 |
| 4 | 0.8289 | 0.8052 | 0.8035 | 0.8139 | 1.2276 | 0.9977 | 0.8849 |
Table 11.
RMS of frequency spectrum (10−3), slab with void below impactor.
Table 11.
RMS of frequency spectrum (10−3), slab with void below impactor.
| Sensor N° | Measurement |
|---|
| | A | B | C | D | E | F | G |
|---|
| 1 | 2.1684 | 1.8025 | 1.5266 | 1.5733 | 2.8588 | 1.7611 | 1.7008 |
| 2 | 2.0785 | 1.8145 | 2.7309 | 2.4415 | 1.5800 | 3.7172 | 1.8479 |
| 3 | 1.5824 | 2.0308 | 1.9463 | 1.7742 | 1.1389 | 3.8032 | 2.4548 |
| 4 | 1.4977 | 1.4021 | 1.4673 | 1.5174 | 3.0528 | 2.1219 | 1.6850 |
Table 12.
Integral and RMS of frequency spectrum, solid slab.
Table 12.
Integral and RMS of frequency spectrum, solid slab.
| Sensor N° | Integral (10−1) | Δ [%] | RMS (10−3) | Δ [%] | Detected? |
|---|
| 1 | 1.464 | 2 | 2.971 | 5 | N |
| 2 | 1.489 | 4 | 2.932 | 6 | N |
| 3 | 1.453 | 1 | 3.366 | 8 | N |
| 4 | 1.342 | 7 | 3.247 | 4 | N |
| Mean (RV 1) | 1.437 | - | 3.129 | - | - |
Table 13.
Integral and RMS of frequency spectrum, slab with void below impactor.
Table 13.
Integral and RMS of frequency spectrum, slab with void below impactor.
| Sensor N° | Integral (10−1) | Δ [%] | RMS (10−3) | Δ [%] | Detected? |
|---|
| 1 | 1.058 | 26 | 1.913 | 39 | Y |
| 2 | 1.286 | 10 | 2.316 | 26 | Y |
| 3 | 1.040 | 28 | 2.104 | 33 | Y |
| 4 | 0.909 | 37 | 1.821 | 42 | Y |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}