
Dynamic ESPI Evaluation of Deformation and Fracture Mechanism of 7075 Aluminum Alloy


Abstract
:1. Introduction
2. ESPI Optical Measurement System and Analysis Algorithm
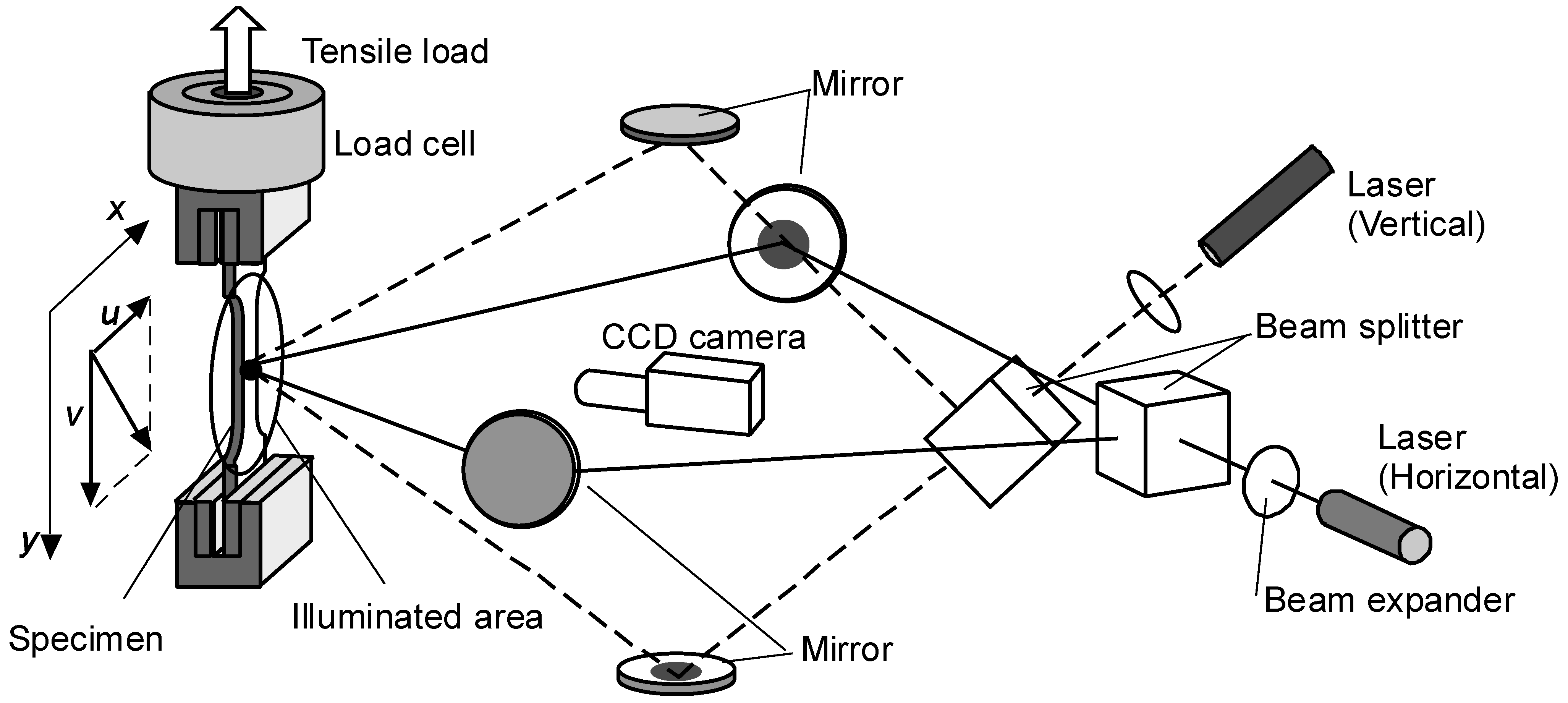
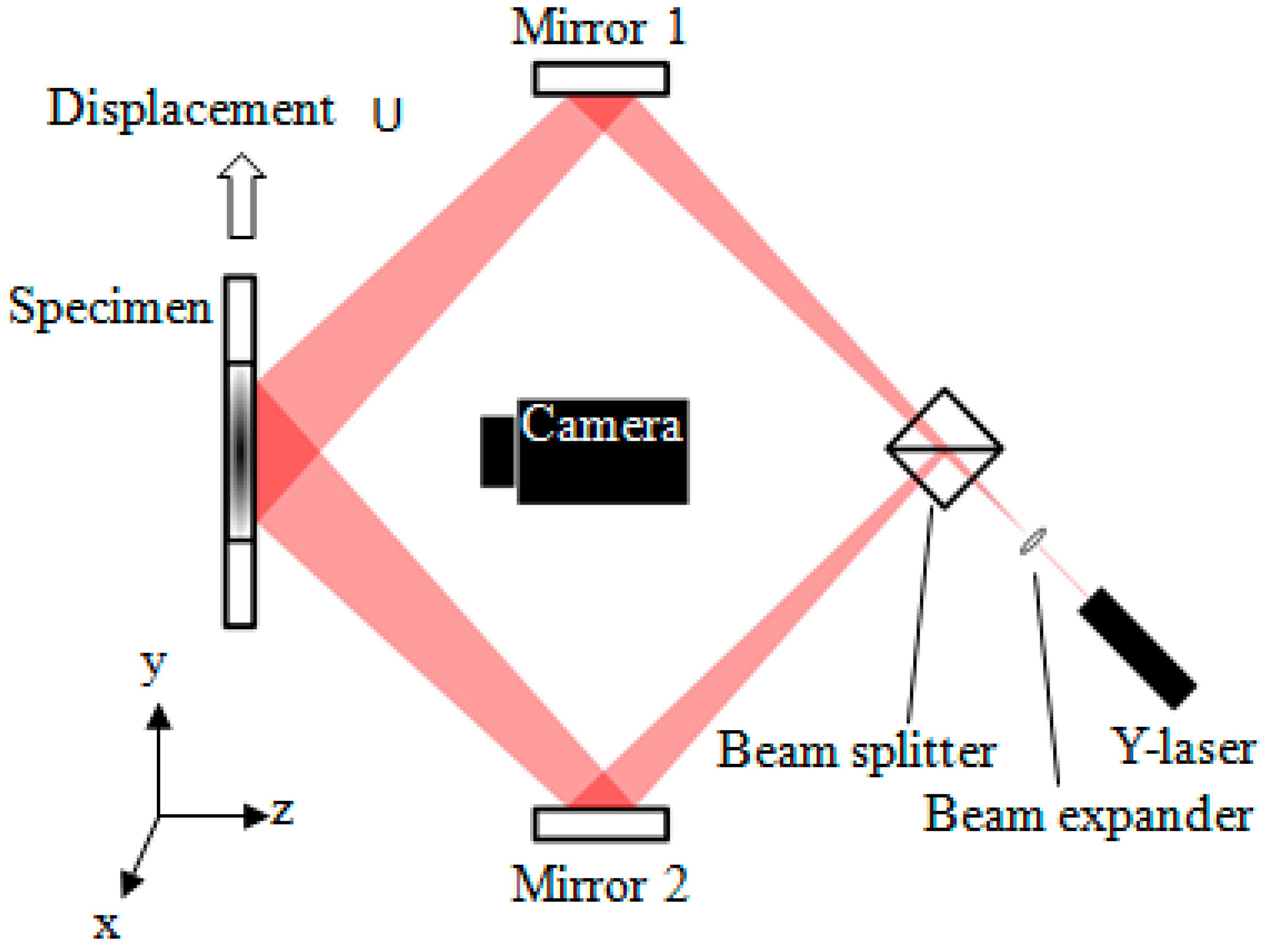
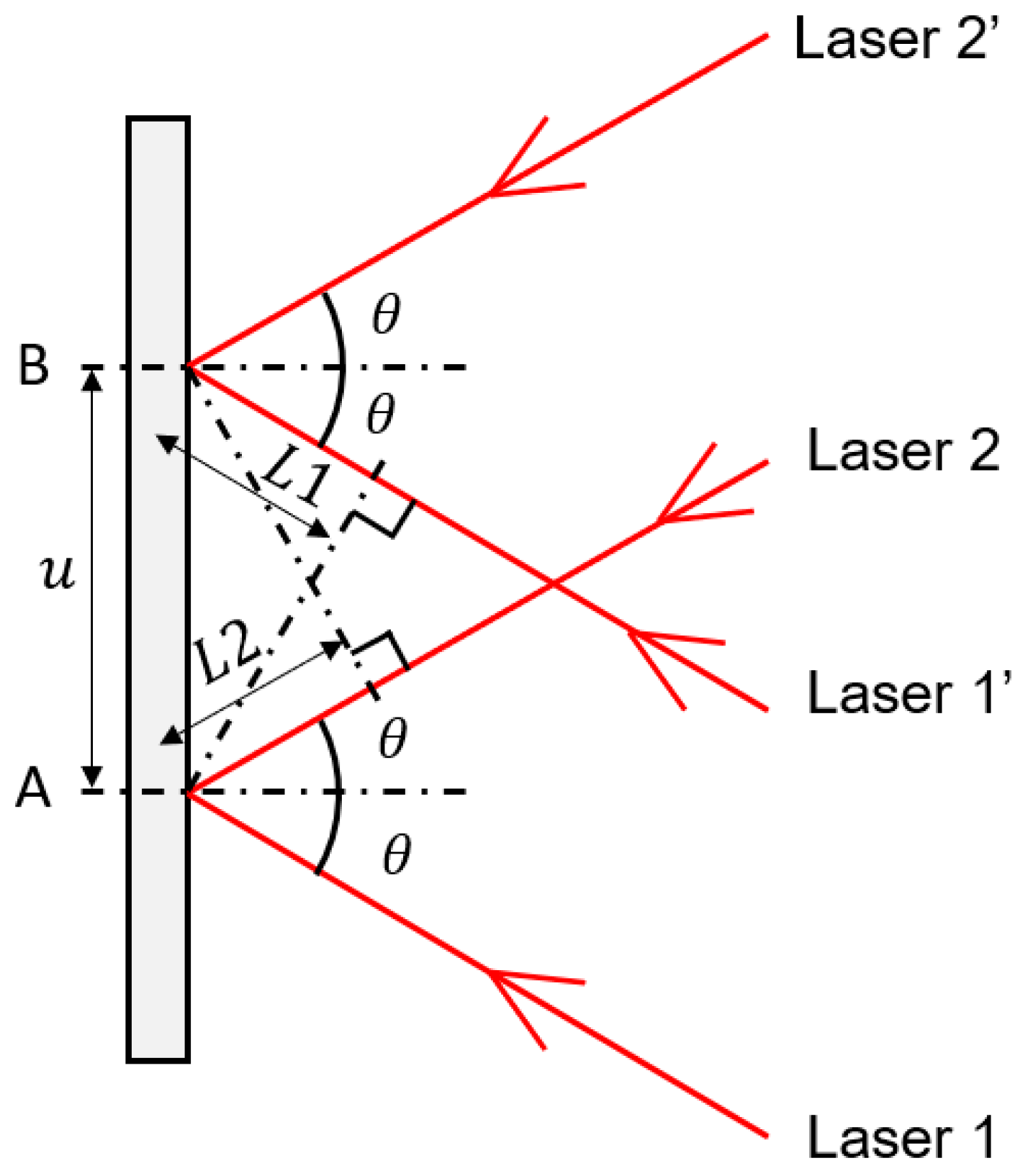
2.1. Optical Arrangement of Electronic Speckle Pattern Interferometry
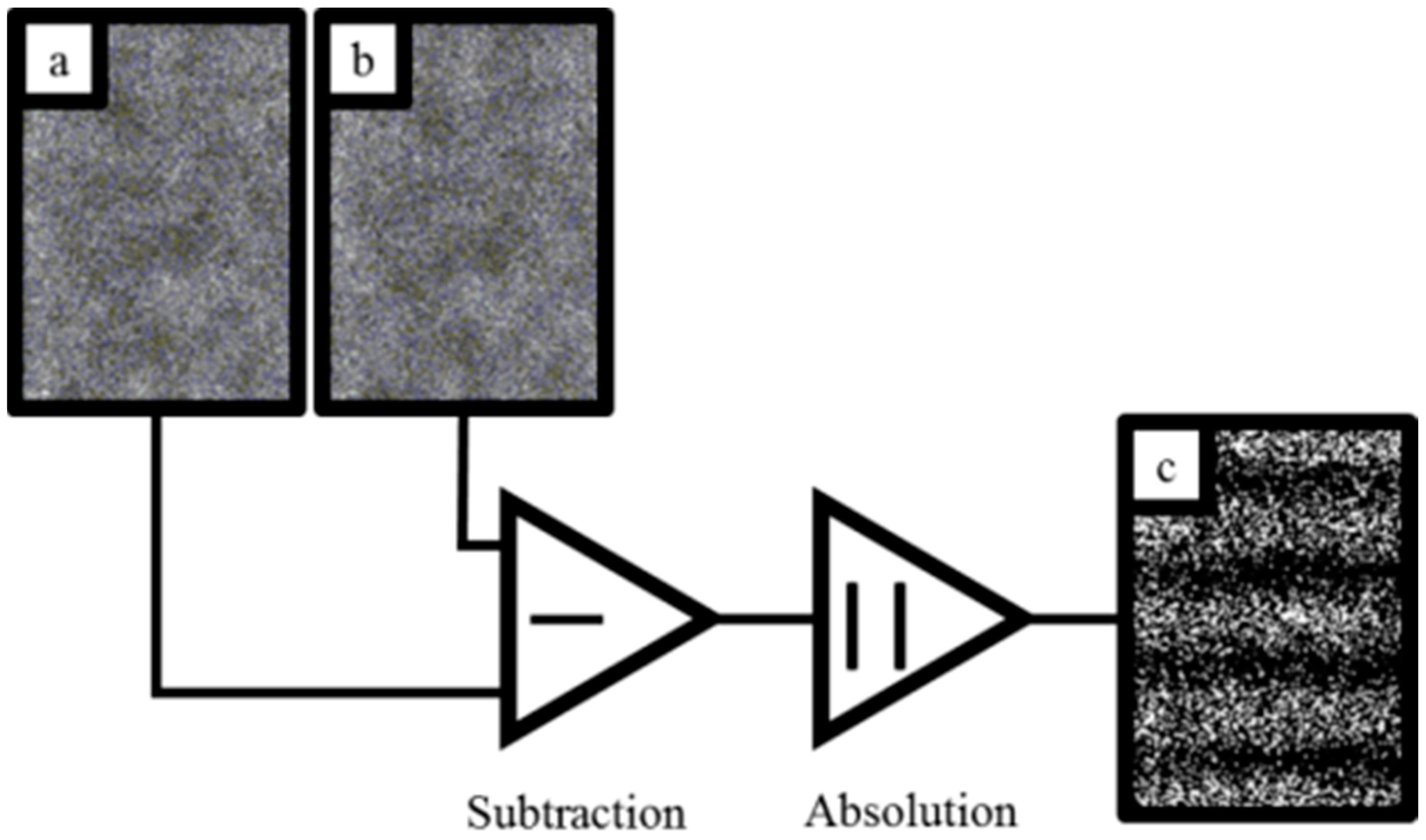
2.2. Fringe Pattern Analysis
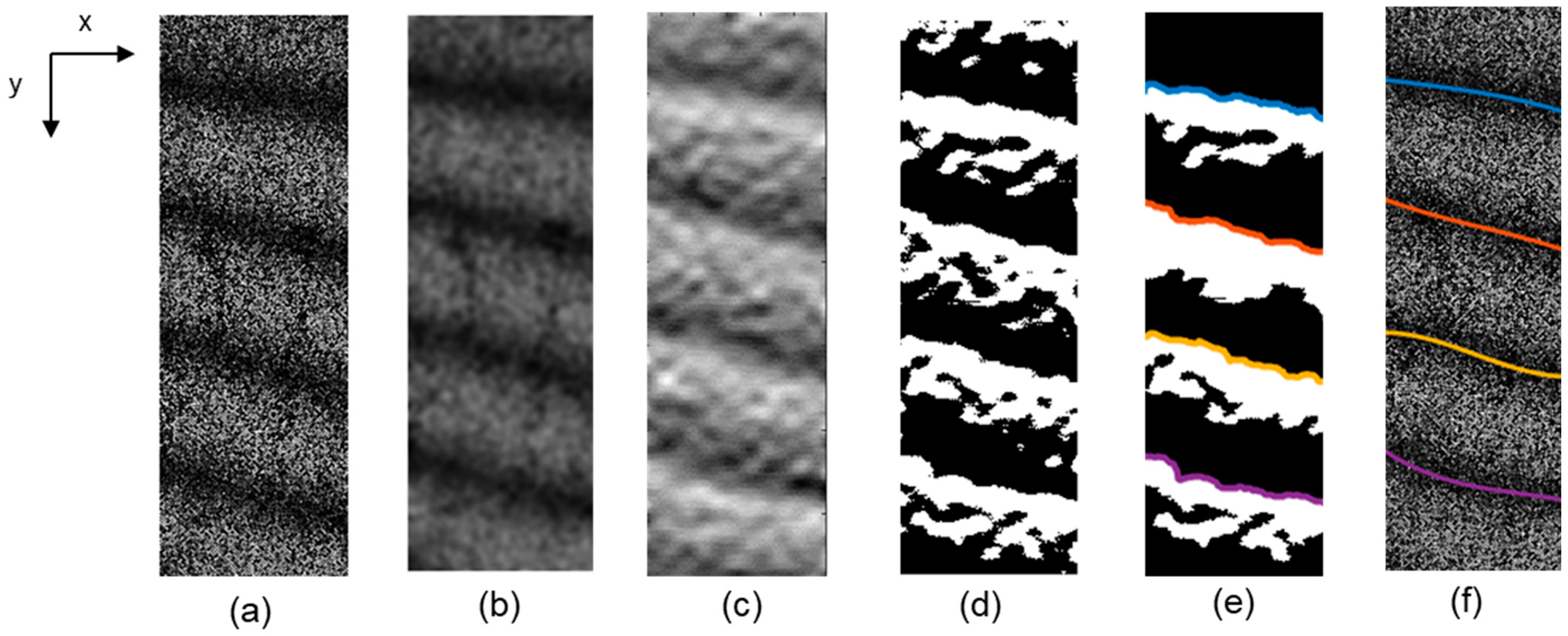
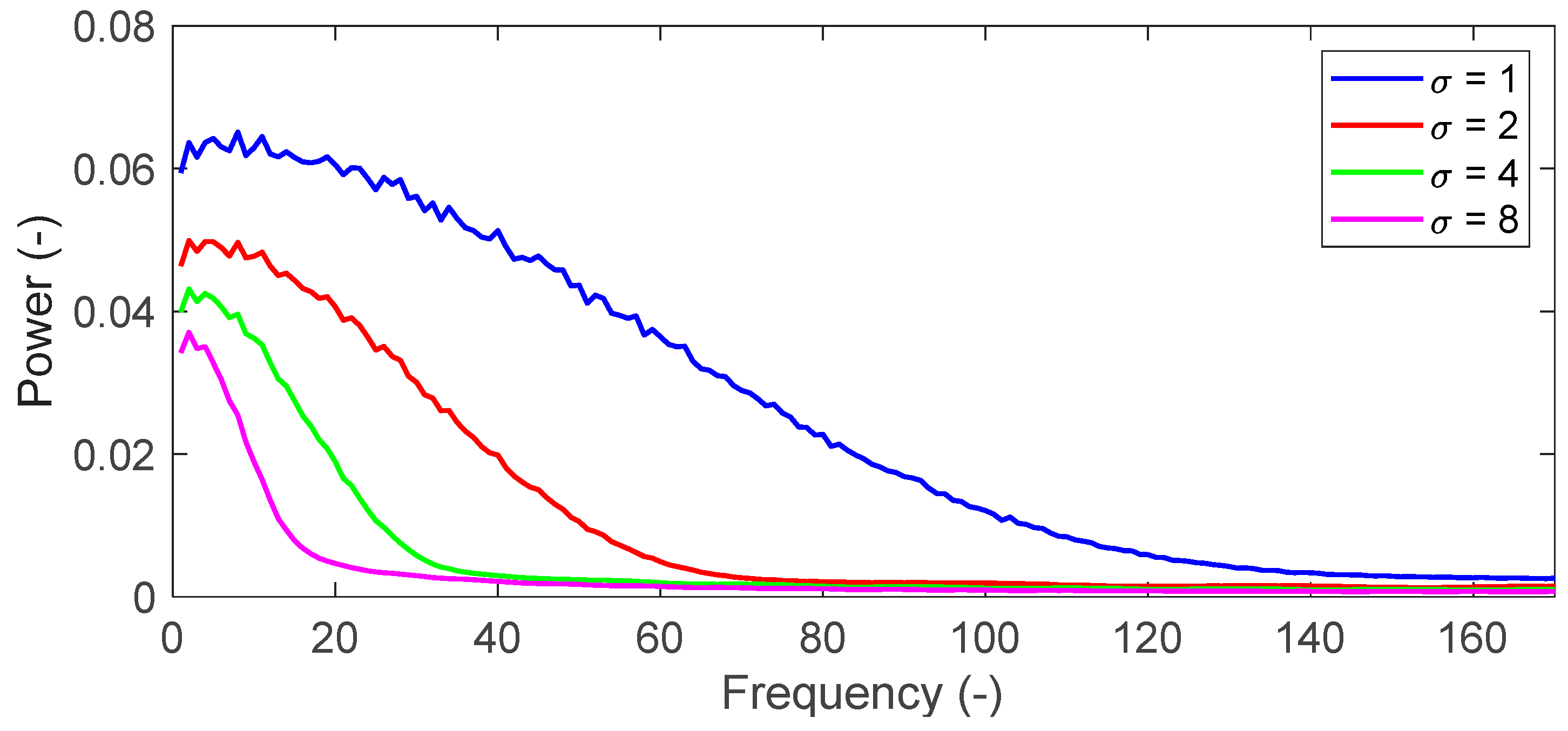
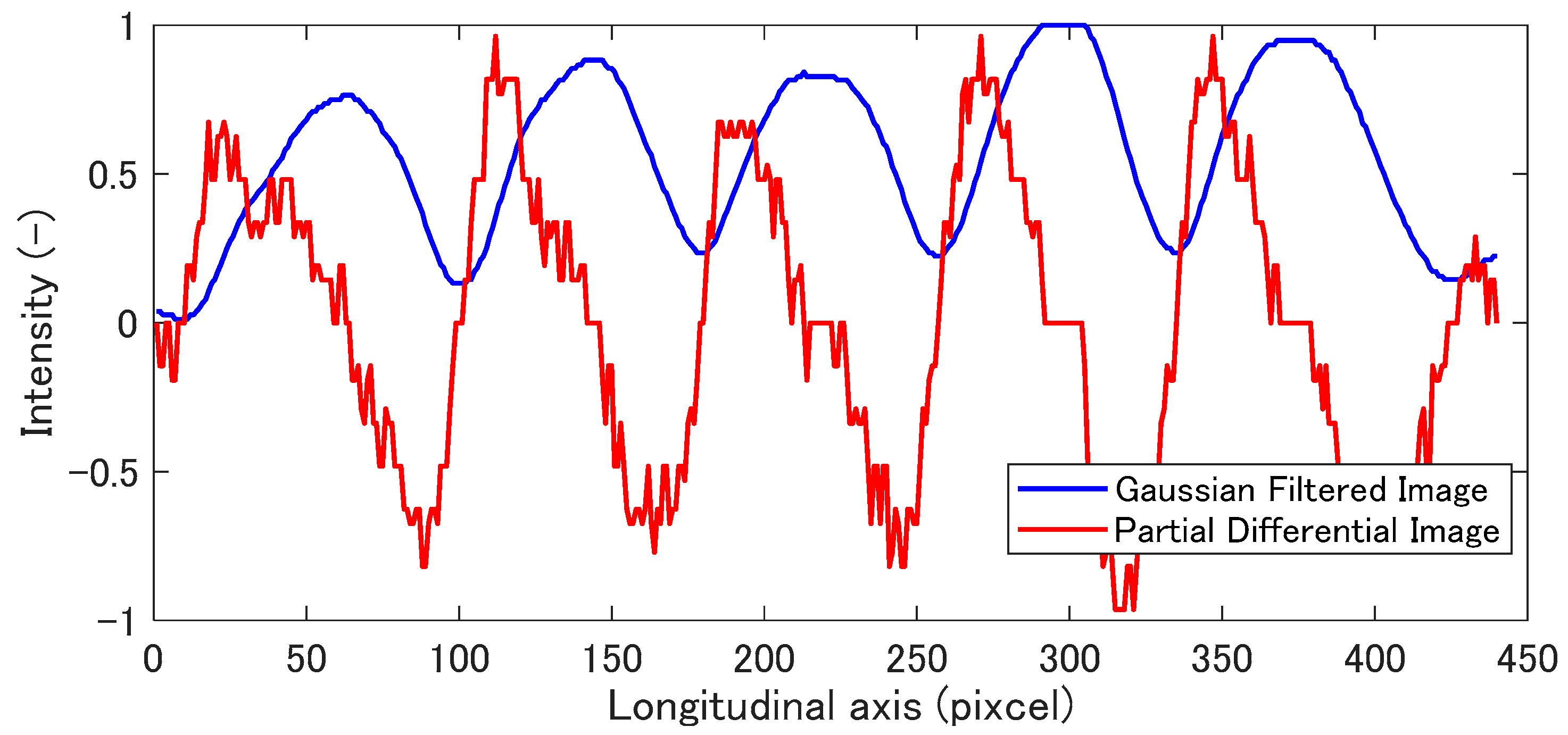
- Step (i): Speckle noise reduction using Gaussian filter.
- Step (ii): Phase determination with partial differential image
- Step (iii): Binarization
- Step (iv): Morphological processing
- Step (v): Detection fringes and interpolation
3. Deformation Process Observed in the Tensile Test
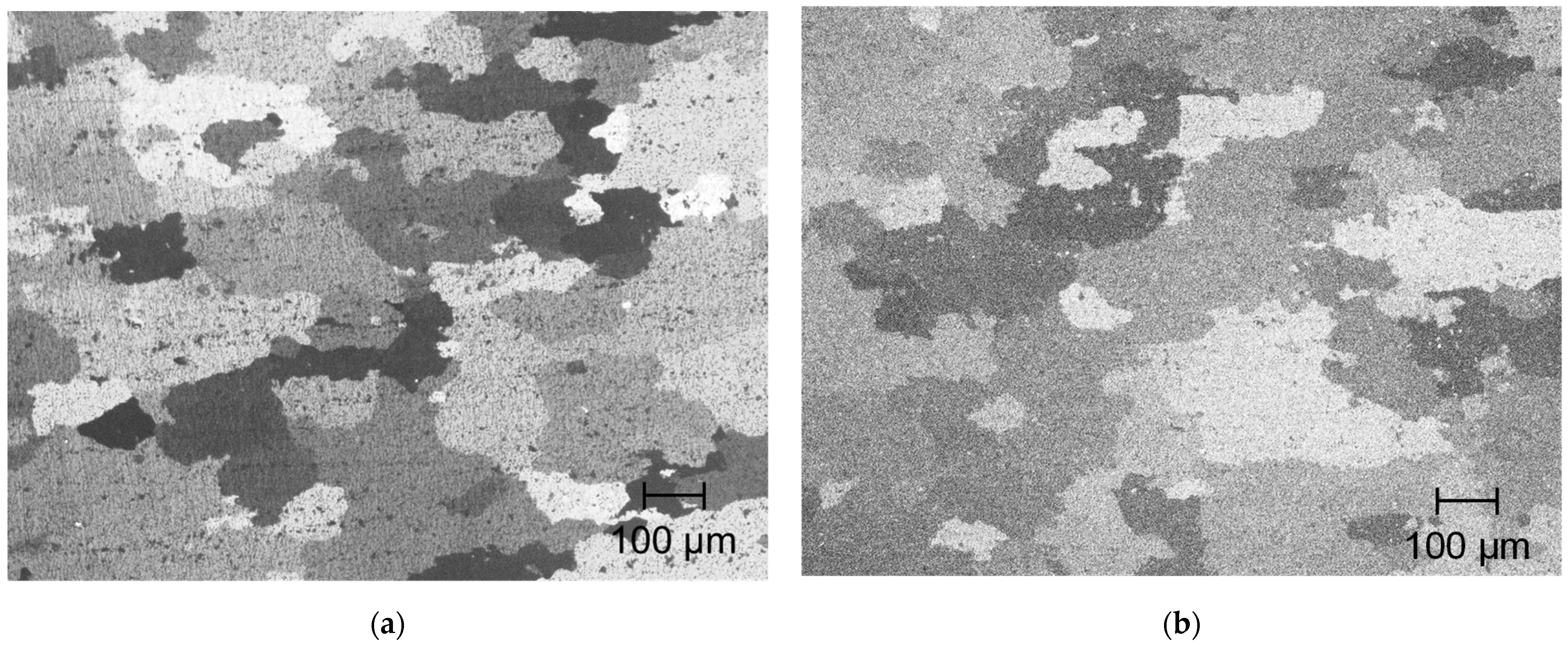
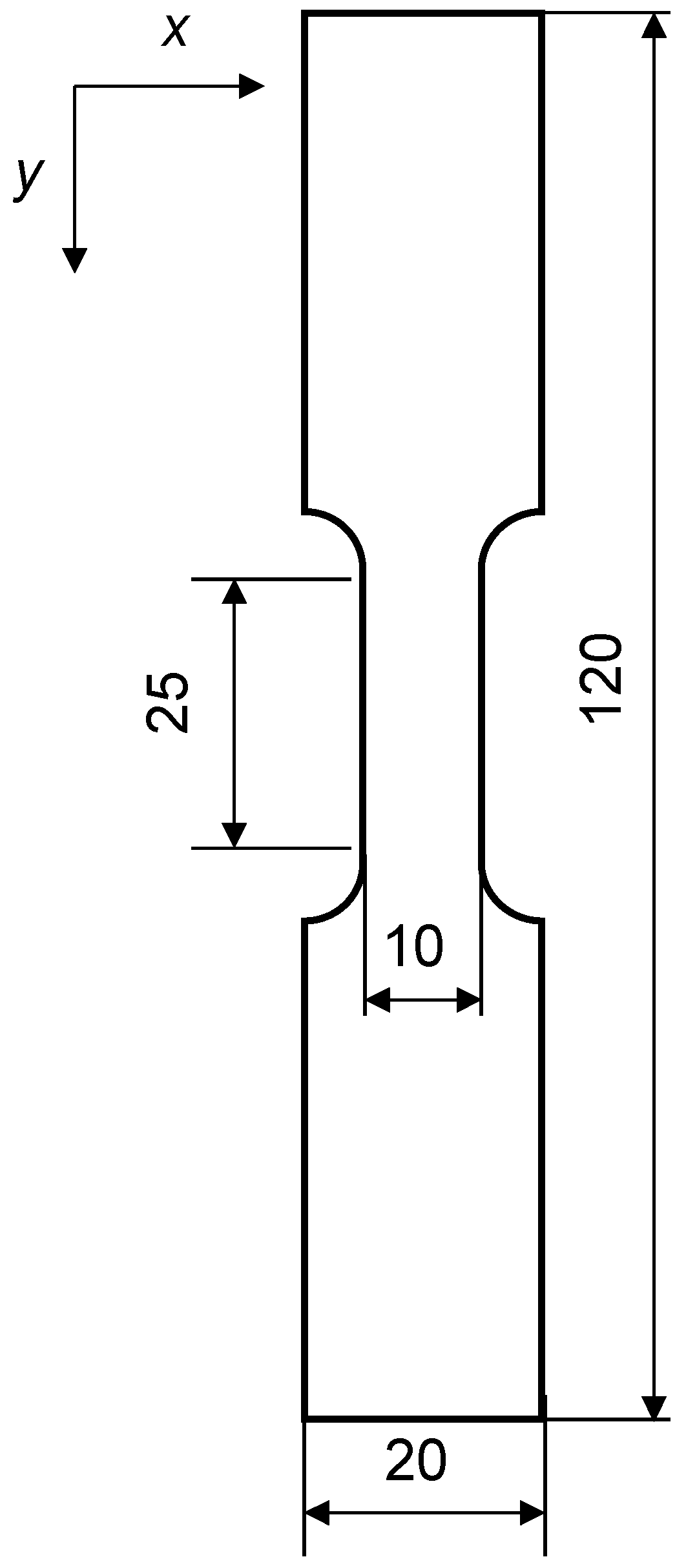
3.1. Material and Specimen
3.2. Experimental Results
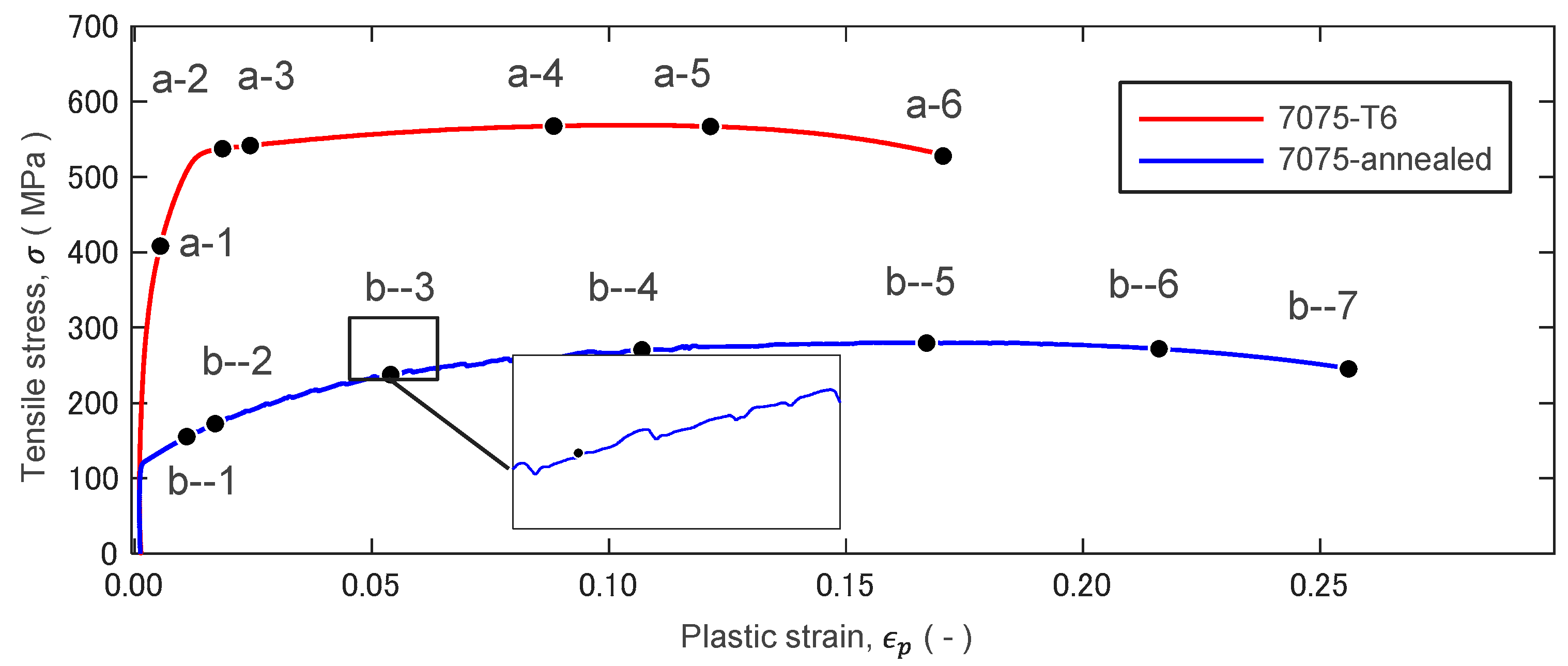
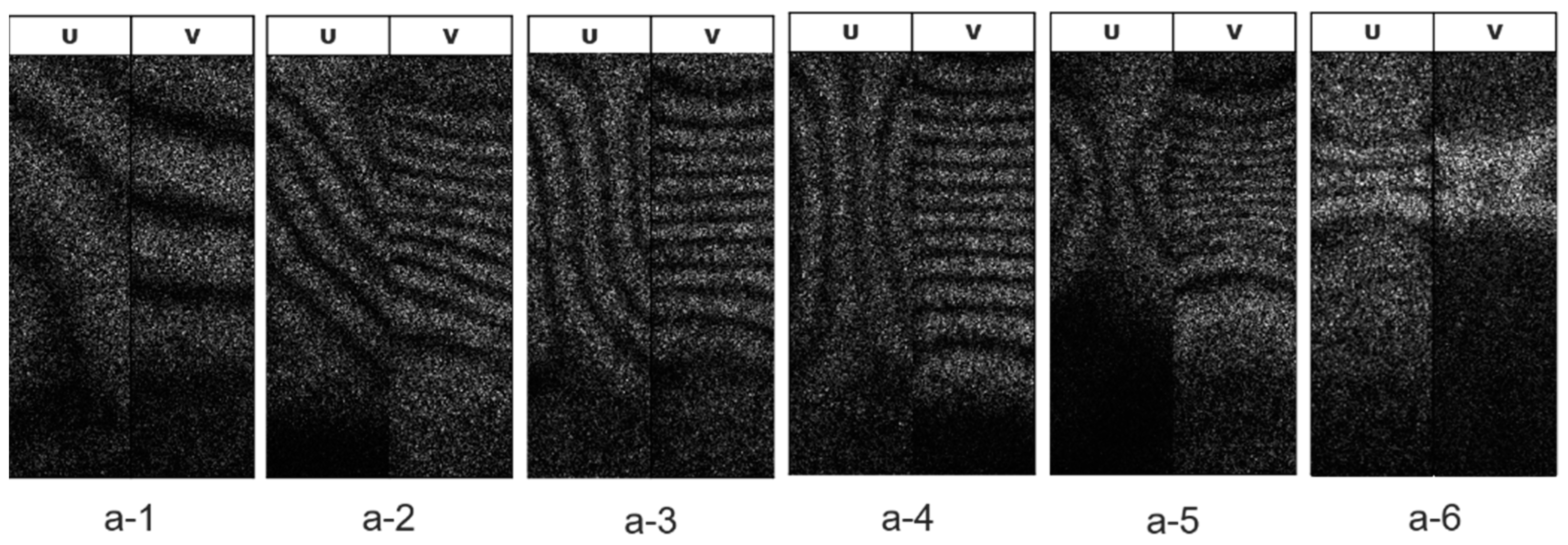
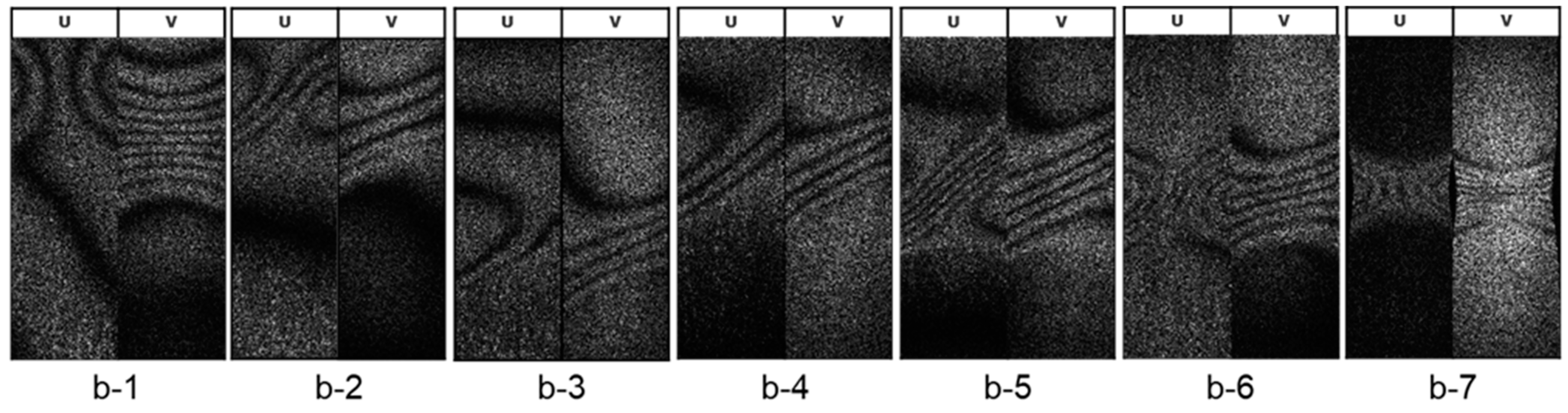
3.2.1. 7075-T6 Alloy
3.2.2. 7075-Annealed Alloy
4. Discussion
4.1. General Arguments of Deformation and Fracture Based on Field Theory
4.1.1. Equation of Motion
4.1.2. Rotational Nature of Plasticity
4.1.3. Irreversibility of Plasticity
4.2. Experimental Observations
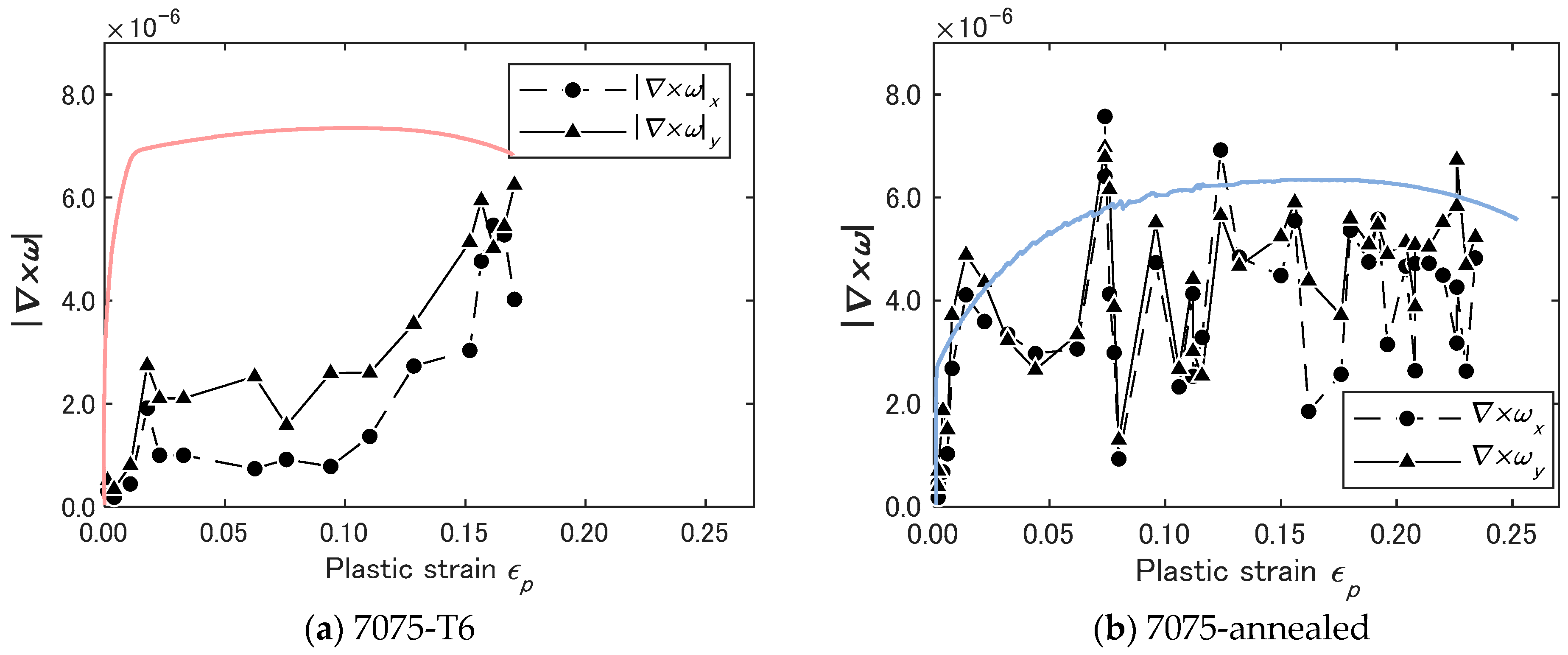
Increase in and Localization of with Development of Deformation.
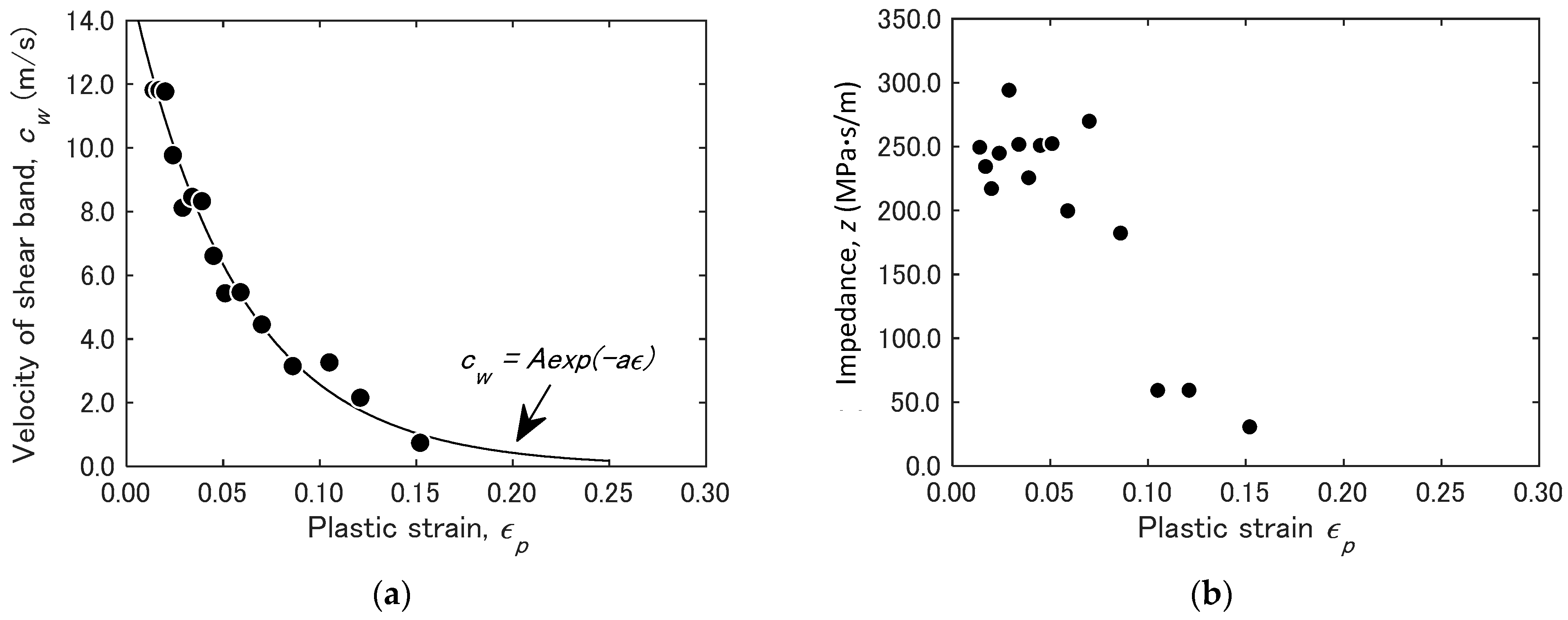
4.3. Activity of Shear Band
4.3.1. Shear Elastic Dynamics in Shear Band
4.3.2. Shear Band as a Constant Charge
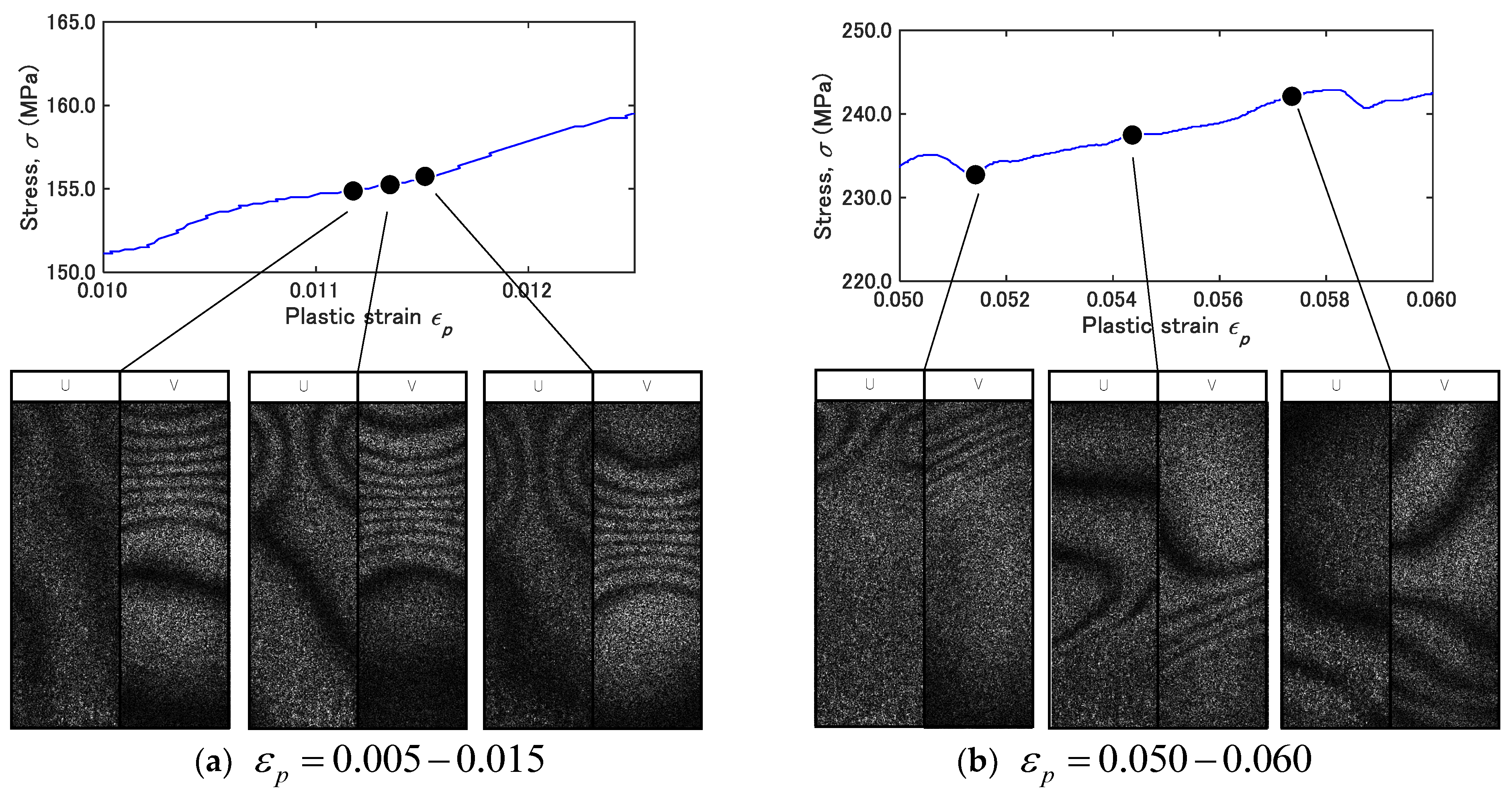
4.3.3. Connection to Mobile Dislocations and Serrations
4.3.4. Solitary Wave
4.3.5. Comparison of T6 and Annealed Specimens
5. Conclusions
- The proposed method for the fringe analysis using image processing can detect the fringe contours without a phase-stepping method. The dynamic deformation behavior of 7075-alloys can be evaluated using this method.
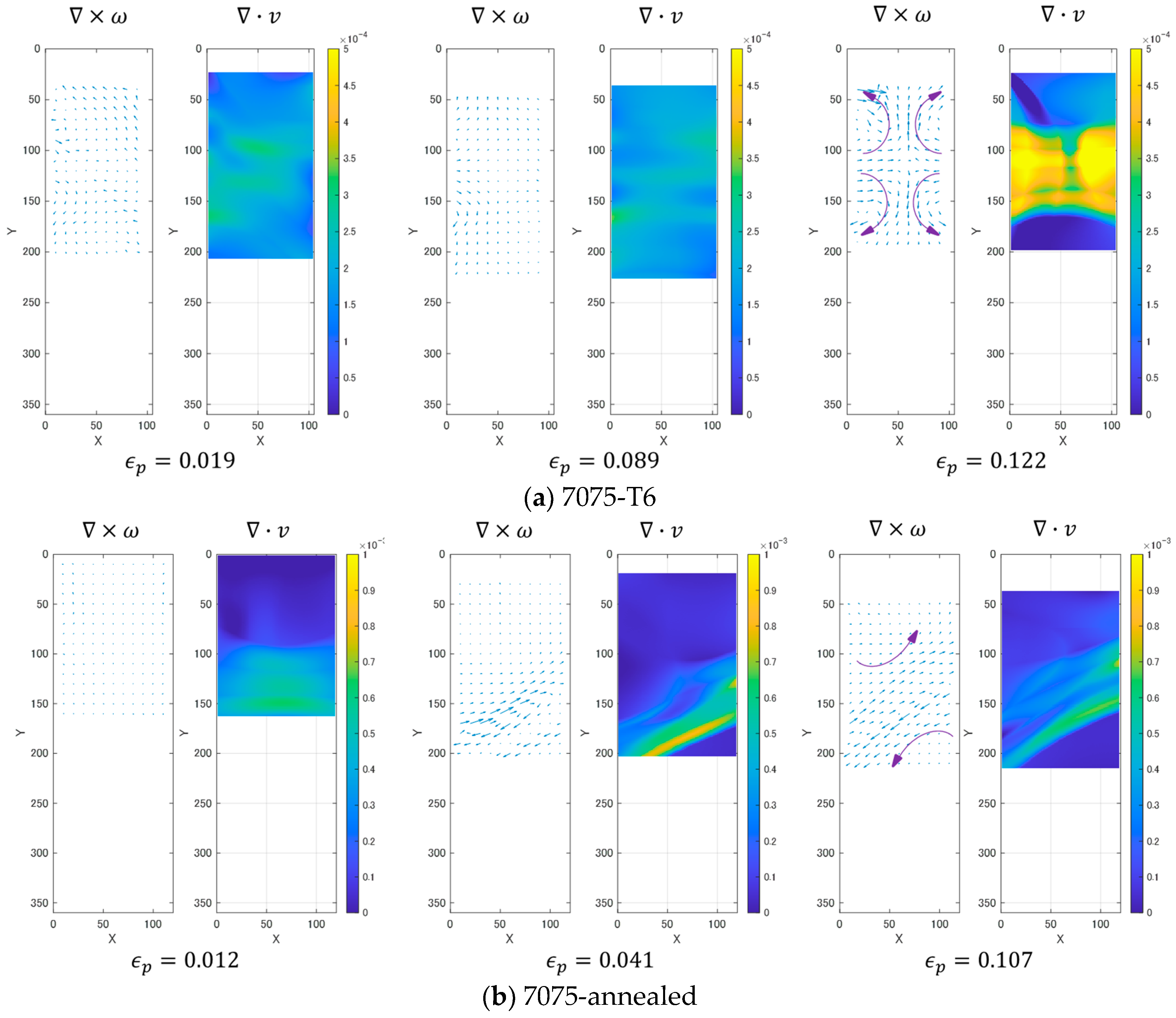
- With the increasing of the plastic strain, the field becomes less uniform. At the same time, the charge distribution is localized in a certain region of the specimen where the charge density increases. These transitions from symmetric to asymmetric deformation field are caused by transitions from longitudinal-force dominant resistive mechanisms to shear-force dominant mechanisms.
- The deformation localization is closely related to the shear elastic dynamics. In microscopic view, the plastic deformation is initiated via driving the mobile dislocation. The shear force () vectors on the opposite sides of a shear band curls oppositely. The mutually opposite curly vector fields exert strong differential shear force along the boundary. This differential shear force can be interpreted as the frictional force that drives mobile dislocations.
- The T6 specimen exhibits more brittle behavior in the stress–strain characteristics and the annealed specimen exhibits more ductile behavior. The observed contrast in the pattern of increase/decrease characterizes that the T6 specimen is more brittle and annealed is more ductile.
- The fringe patterns of the T6 and annealed specimens show similar characteristics in the initial stage, differ in the progressive stage of deformation, and show similarity again in the final stage. This is because the dislocations are not active in the initial and final stages.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Principle of ESPI




References
- Yilmaz, A. Portevin–Le Chatelier effect: A review of experimental findings. Sci. Technol. Adv. Mater. 2011, 11, 11–16. [Google Scholar] [CrossRef] [PubMed]
- McCormick, P.G. The Portevin-Le Chatelier effect in an Al-Mg-Si alloy. Acta Metal. 1971, 19, 463–471. [Google Scholar] [CrossRef]
- Sarmah, R.; Anathakrishna, G. Correlation between band propagation property and the nature of serrations in the Portevin–Le Chatelier effect. Acta Metall. 2015, 91, 192–201. [Google Scholar] [CrossRef]
- Yoshida, S. Comprehensive Description of Deformation of Solids as Wave Dynamics. Math. Mech. Complex Syst. 2015, 3, 243–272. [Google Scholar] [CrossRef]
- Yoshida, S. Deformation and Fracture of Solid-State Materials; Springer: New York, NY, USA, 2015. [Google Scholar]
- Hassan, G.M. Deformation measurement in the presence of discontinuities with digital image correlation: A review. Opt. Lasers Eng. 2021, 137, 106394. [Google Scholar] [CrossRef]
- Ranc, N.; Du, W.; Ranc, I.; Wagner, D. Experimental studies of Portevin-Le Chatelier plastic instabilities in carbon-manganese steels by infrared pyrometry. Mater. Sci. Eng. A 2016, 663, 166–173. [Google Scholar] [CrossRef]
- Yoshida, S.; Sasaki, T. Deformation Wave Theory and Application to Optical interferometry. Materials 2020, 13, 1363. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoshida, S.; McGibboney, C.; Sasaki, T. Nondestructive Evaluation of Solids Based on Deformation Wave Theory. Appl. Sci. 2020, 10, 5524. [Google Scholar]
- Pati, A.; Rastogi, P. Approaches in generalized phase shifting interferometry. Opt. Lasers Eng. 2005, 43, 475–490. [Google Scholar] [CrossRef]
- Shirohi, R.S. Speckle Methods in Experimental Mechanics. In Speckle Metrology; Shirohi, R.S., Ed.; CRC Press: Boca Raton, FL, USA, 1993; pp. 99–154. [Google Scholar]
- Fritsch, F.N.; Carlson, R.E. Monotone Piecewise Cubic Interpolation. SIAM J. Numer. Anal. 2006, 17, 238–246. [Google Scholar] [CrossRef]
- Erofeev, V.I.; Malkhanov, A. Nonlinear acoustic waves in solids with dislocations. Procedia IUTAM 2017, 23, 228–235. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alloy | Si | Fe | Cu | Mn | Mg | Cr | Zn | Ti |
|---|---|---|---|---|---|---|---|---|
| 7075 | ~0.40 | ~0.50 | 1.2~2.0 | ~0.30 | 2.1~2.9 | 0.18~0.28 | 5.1~6.1 | ~0.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takahashi, S.; Yoshida, S.; Sasaki, T.; Hughes, T. Dynamic ESPI Evaluation of Deformation and Fracture Mechanism of 7075 Aluminum Alloy. Materials 2021, 14, 1530. https://doi.org/10.3390/ma14061530
Takahashi S, Yoshida S, Sasaki T, Hughes T. Dynamic ESPI Evaluation of Deformation and Fracture Mechanism of 7075 Aluminum Alloy. Materials. 2021; 14(6):1530. https://doi.org/10.3390/ma14061530
Chicago/Turabian StyleTakahashi, Shun, Sanichiro Yoshida, Tomohiro Sasaki, and Tyler Hughes. 2021. "Dynamic ESPI Evaluation of Deformation and Fracture Mechanism of 7075 Aluminum Alloy" Materials 14, no. 6: 1530. https://doi.org/10.3390/ma14061530