A Novel Hydraulic Actuation System Utilizing Magnetorheological Fluids for Single-Port Laparoscopic Surgery Applications

Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Concept of a Smart Hydraulic Actuation System for Single-Port Laparoscopic Surgery (SLS) Applications
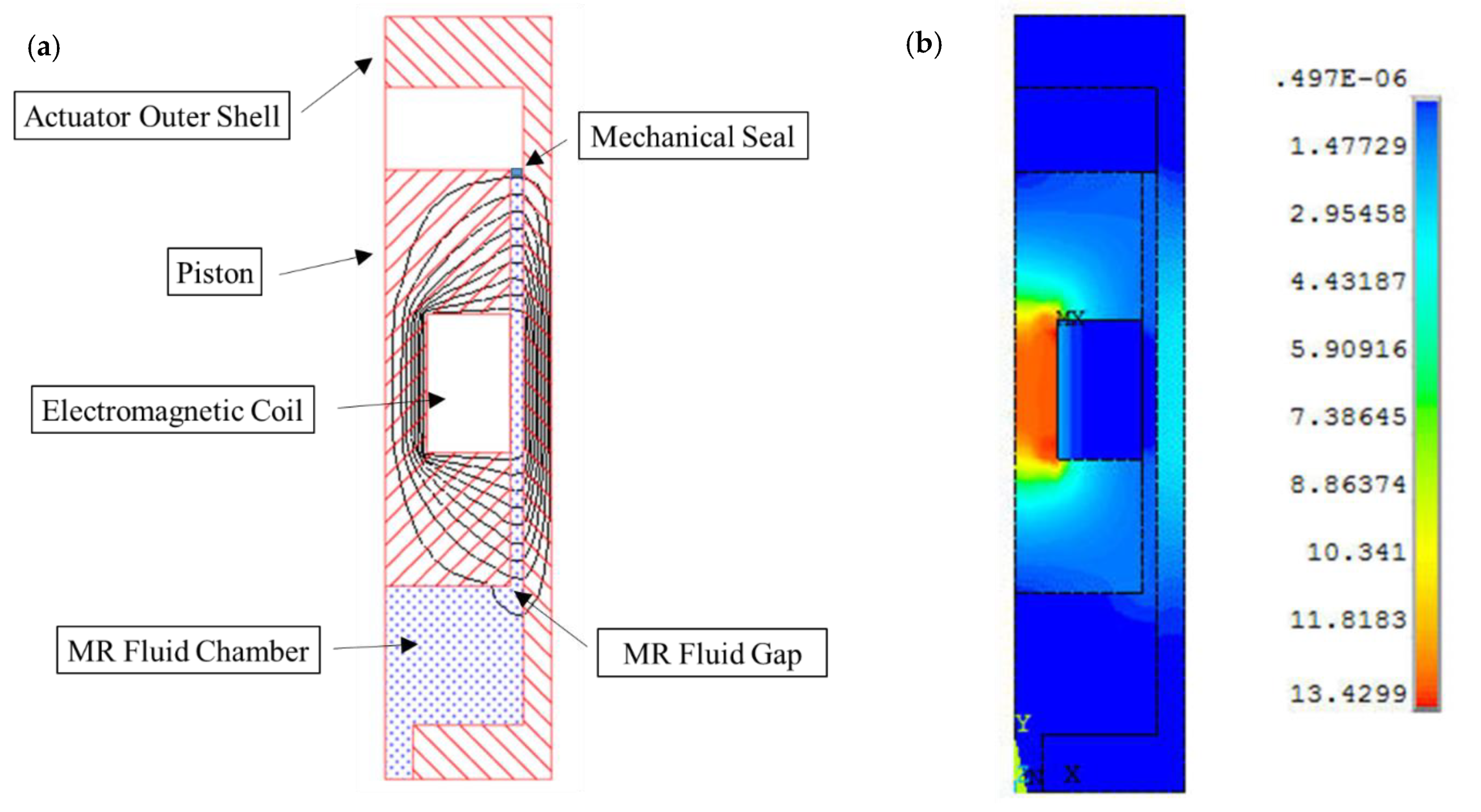
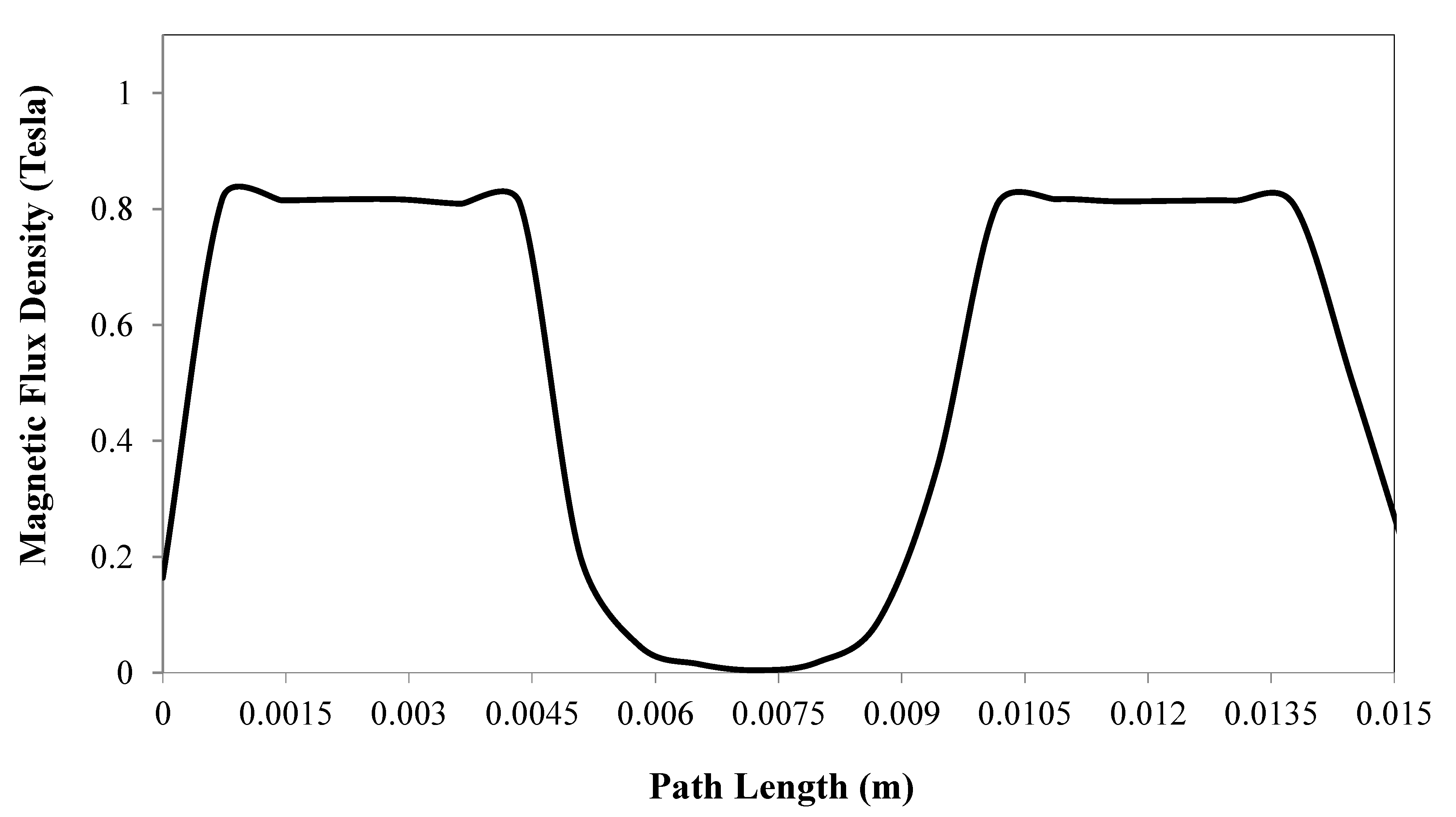
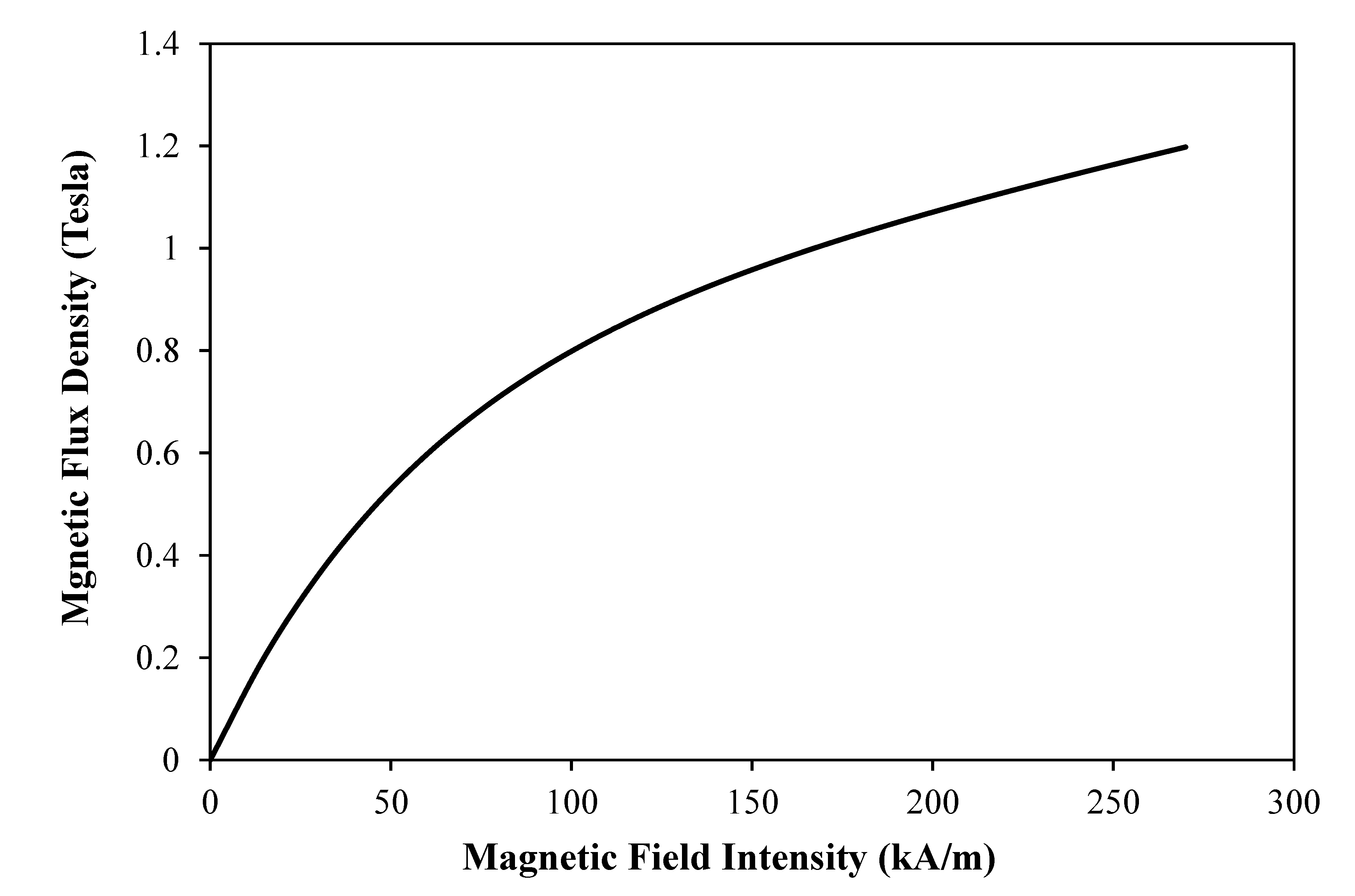
2.2. MR Fluid Actuator Design
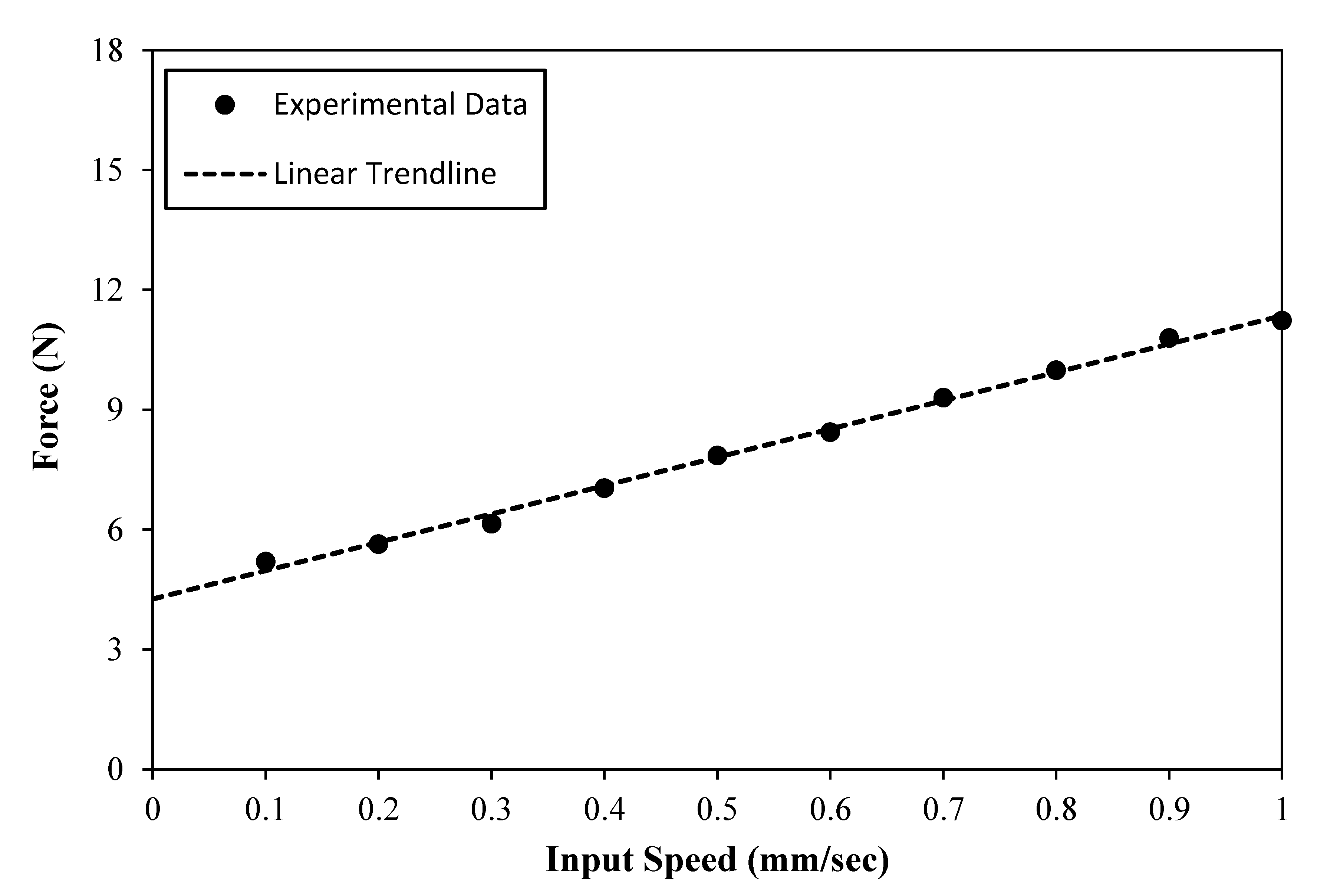
3. Results and Discussion
4. Conclusions
Funding
Conflicts of Interest
References
- Miernik, A.; Schoenthaler, M.; Lilienthal, K.; Frankenschmidt, A.; Karcz, W.; Kuesters, S. Pre-bent instruments used in single-port laparoscopic surgery versus conventional laparoscopic surgery: Comparative study of performance in a dry lab. Surg. Endosc. 2012, 26, 1924–1930. [Google Scholar] [CrossRef] [PubMed]
- Rané, A.; Rao, P.; Rao, P. Single-port-access nephrectomy and other laparoscopic urologic procedures using a novel laparoscopic port (R-Port). Urology 2008, 72, 260–263. [Google Scholar] [CrossRef] [PubMed]
- Paranjape, C.; Ojo, O.; Carne, D.; Guyton, D. Single-incision laparoscopic total colectomy. JSLS 2012, 16, 27–32. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paek, J.; Nam, E.; Kim, Y.; Kim, S. Overcoming technical difficulties with single-port access laparoscopic surgery in gynecology: Using conventional laparoscopic instruments. J. Laparoendosc. Adv. Surg. Tech. 2011, 21, 137–141. [Google Scholar] [CrossRef]
- Zani, A.; Ade-Ajayi, N. Flexible-tip laparo-endoscopic surgery: A bridge to single port appendicectomy in children. Eur. J. Pediatr. Surg. 2011, 21, 322–324. [Google Scholar] [CrossRef]
- Stolzenburg, J.; Kallidonis, P.; Oh, M.; Nabi, G.; Do, M.; Haefner, T.; Dietel, A.; Till, H.; Sakellaropoulos, G.; Liatsikos, E. Comparative assessment of laparoscopic single-site surgery instruments to conventional laparoscopic in laboratory setting. J. Endourol. 2010, 24, 239–245. [Google Scholar] [CrossRef] [Green Version]
- Can, S.; Staub, C.; Knoll, A.; Fiolka, A.; Schneider, A.; Feussner, H. Design, development and evaluation of a highly versatile robot platform for minimally invasive single-port surgery. In Proceedings of the 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 817–822. [Google Scholar]
- Cianchetti, M.; Ranzani, T.; Gerboni, G.; De Falco, I.; Laschi, C.; Menciassi, A. STIFF-FLOP surgical manipulator: Mechanical design and experimental characterization of the single module. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Wang, H.; El Wahed, A.K. The performance of a novel latching-type electromagnetic actuator for single-port laparoscopic surgery. J. Mod. Phys. 2019, 10, 1659–1673. [Google Scholar] [CrossRef] [Green Version]
- Bossis, G.; Lacis, S.; Meunier, A.; Volkova, O. Magnetorheological fluids. J. Magn. Magn. Mater. 2002, 252, 224–228. [Google Scholar] [CrossRef]
- Tao, R. Super-strong magnetorheological fluids. J. Phys. Condens. Matter 2001, 13, 979–999. [Google Scholar] [CrossRef]
- Rabinow, J. The magnetic fluid clutch. AIEE Trans. 1949, 67, 1308–1315. [Google Scholar]
- El Wahed, A.K.; Sproston, J.L.; Schleyer, G.K. Electrorheological and magnetorheological fluids in blast resistant design applications. Mater. Des. 2002, 23, 391–404. [Google Scholar] [CrossRef]
- Llorente, V.J.; Pascau, A. Numerical simulations of magnetorheological fluids flowing between two fixed parallel plates. Appl. Math. Model. 2019, 74, 51–169. [Google Scholar] [CrossRef]
- El Wahed, A.K.; Wang, H. Performance evaluation of a magnetorheological fluid damper using numerical and theoretical methods with experimental validation. Front. Mater. Smart Mater. 2019, 6, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Song, W.; Wang, S.; Choi, S.B. Thermal and tribological characteristics of a disc-type magnetorheological brake operated by the shear mode. J. Intell. Mater. Syst. Struct. 2019, 30, 722–733. [Google Scholar] [CrossRef]
- El Wahed, A.K.; Balkhoyor, L. Magnetorheological fluids subjected to tension, compression, and oscillatory squeeze input. Smart Struct. Syst. 2015, 16, 961–980. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, Q.; Liu, H.; Lian, M.; Li, T. Aggregated chain morphological variation analysis of magnetorheological fluid (MRF) in squeeze mode. Smart Mater. Struct. 2019, 28, 105038. [Google Scholar] [CrossRef]
- El Wahed, A.K.; Balkhoyor, L. Characteristics of magnetorheological fluids under single and mixed modes. Proc. IMechE Part C J. Mech. Eng. Sci. 2016, 231, 3798–3809. [Google Scholar] [CrossRef] [Green Version]
- Yazid, I.I.M.; Mazlan, S.A.; Imaduddin, F.; Choi, S.B.; Kikuchi, T. An investigation on the mitigation of end-stop impacts in a magnetorheological damper operated by the mixed mode. Smart Mater. Struct. 2016, 25, 125005. [Google Scholar] [CrossRef]
- Versaci, M.; Palumbo, A. Magnetorheological fluids: Qualitative comparison between a mixture model in the extended irreversible thermodynamics framework and an Herschel–Bulkley experimental elastoviscoplastic model. Int. J. Non-Linear Mech. 2020, 118, 103288. [Google Scholar] [CrossRef]
- Wu, J.; Hu, H.; Li, Q.; Wang, S.; Liang, J. Simulation and experimental investigation of a multi-pole multi-layer magnetorheological brake with superimposed magnetic fields. Mechatronics 2020, 65, 102314. [Google Scholar] [CrossRef]
- Pourghodrat, A.; Nelson, C.A. Disposable fluidic actuators for miniature in-vivo surgical robotics. J. Med. Device 2017, 11, 0110031–0110038. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sato, Y.; Shiraishi, T.; Morishita, S. Design of magnetorheological devices on flow modes. Int. J. Appl. Electromagn. Mech. 2007, 25, 607–611. [Google Scholar] [CrossRef]
- MR Fluid MRF-241ES Product Bulletin, Lord Corporation. Available online: www.lordfulfillment.com (accessed on 28 November 2019).
- ANSYS. Mechanical APDL Low-Frequency Electromagnetic Analysis Guide, ANSYS Release 14.0; ANSYS Inc.: Southpointe, CA, USA, 2011. [Google Scholar]
- Hu, G.; Long, M.; Yu, L.; Li, W. Design and performance evaluation of a novel magnetorheological valve with a tuneable resistance gap. Smart Mater. Struct. 2014, 23, 127001. [Google Scholar] [CrossRef]
- Yazid, I.I.M.; Mazlan, S.A.; Kikuchi, T.; Zamzuri, H.; Imaduddin, F. Design of magnetorheological damper with a combination of shear and squeeze modes. Mater. Des. 2014, 54, 87–95. [Google Scholar] [CrossRef]
- Ichwan, B.; Mazlan, S.A.; Imaduddin, F.; Ubaidillahd, K.T.; Idris, M. Development of a modular MR valve using meandering flow path structure. Smart Mater. Struct. 2016, 25, 037001. [Google Scholar] [CrossRef]
- Lee, H.J.; Moon, S.J.; Jung, H.J.; Huh, Y.C.; Jang, D.D. Integrated design method of MR damper and electromagnetic induction system for structural control. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2008; Volume 6932, p. 69320S. [Google Scholar]
- El Wahed, A.K.; Balkhoyor, L.B.; Wang, H.C. The design and performance of a smart ball-and-socket actuator. Int. J. Appl. Electromagn. Mech. 2019, 60, 529–544. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.; Spencer, B.F.; Carlson, J.D.; Sain, M.K. Large-scale MR fluid dampers: Modelling and dynamic performance considerations. Eng. Struct. 2002, 24, 309–323. [Google Scholar] [CrossRef]
- Carlson, J.D. MR fluids and devices in the real world. Int. J. Mod. Phys. B 2005, 19, 1463–1470. [Google Scholar] [CrossRef]
- SMC Pneumatics CJ2 Air Cylinders, Steven Engineering. 2018. Available online: https://www.smcpneumatics.com/pdfs/CJ2.pdf (accessed on 2 January 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MR Fluid Actuator | |
|---|---|
| Outer diameter | 12 mm |
| Length | 27.5mm |
| Piston Diameter, Dp | 9 mm |
| Piston Height, L | 15 mm |
| Effective Axial Pole Length, Le | 5 mm |
| Fluid Shear Gap, h | 0.5 mm |
| Magnetic Material | MaxiMag Low-Carbon Magnetic Iron |
| Angulation Capability | 0–90° |
| Axial Stroke | 6.6 mm |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Wahed, A.K. A Novel Hydraulic Actuation System Utilizing Magnetorheological Fluids for Single-Port Laparoscopic Surgery Applications. Materials 2020, 13, 1380. https://doi.org/10.3390/ma13061380
El Wahed AK. A Novel Hydraulic Actuation System Utilizing Magnetorheological Fluids for Single-Port Laparoscopic Surgery Applications. Materials. 2020; 13(6):1380. https://doi.org/10.3390/ma13061380
Chicago/Turabian StyleEl Wahed, Ali K. 2020. "A Novel Hydraulic Actuation System Utilizing Magnetorheological Fluids for Single-Port Laparoscopic Surgery Applications" Materials 13, no. 6: 1380. https://doi.org/10.3390/ma13061380