
Comparative Study of a Fault-Tolerant Multiphase Wound-Field Doubly Salient Machine for Electrical Actuators

Abstract
:1. Introduction
- The starter-generator for the engine;
- The electrical actuators for the flight control;
- The electric machines for the fuel pump.
2. Comparative Study of the Salient Pole Topology
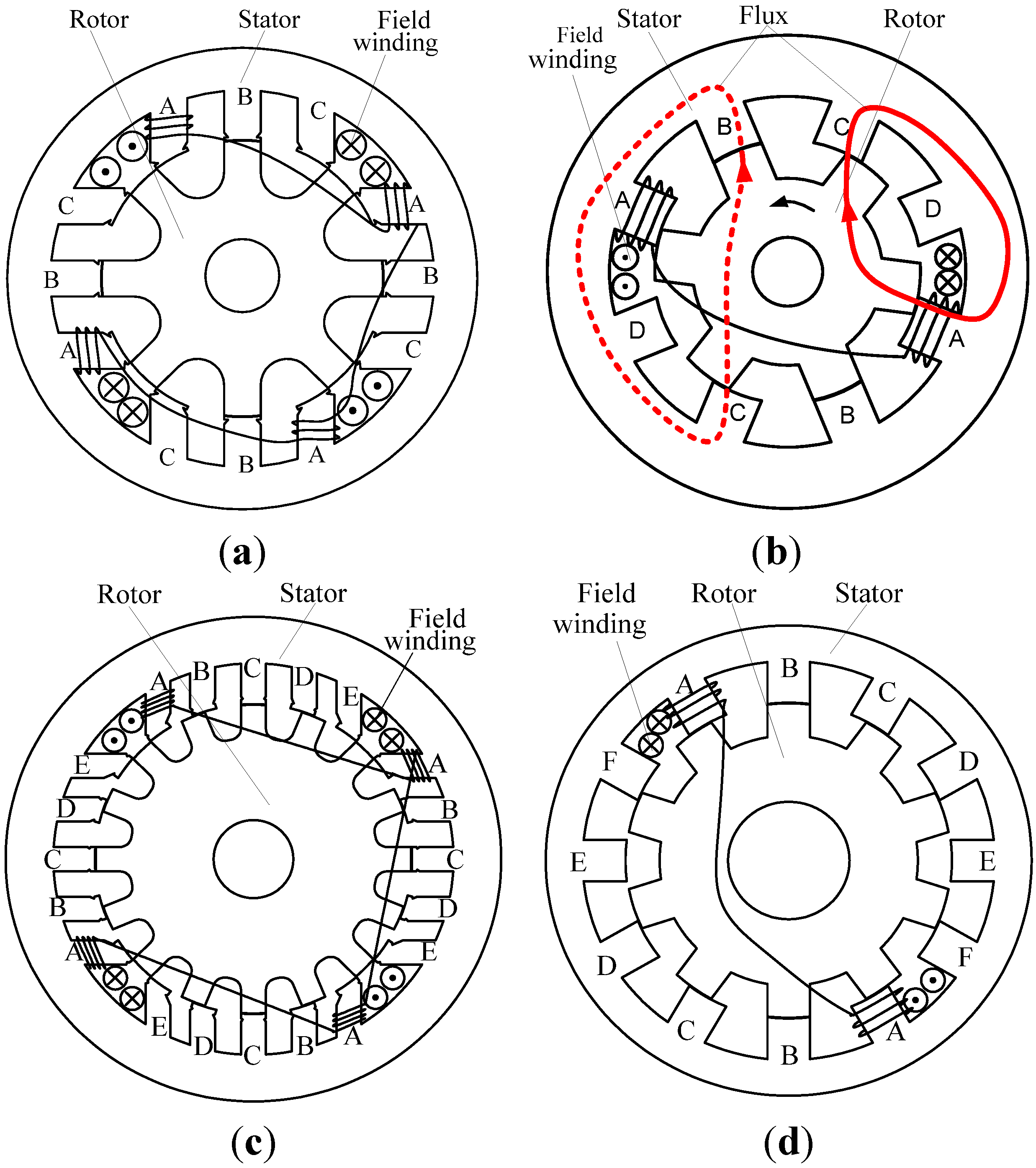
2.1. Salient Pole Number


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase number | Stator poles | Rotor poles | Example |
|---|---|---|---|
| Three-phase | 6N | 4N or 8N | 12/8 |
| Four-phase | 4N | 3N or 5N | 8/6 |
| Five-phase | 10N | 8N or 12N | 20/16 |
| Six-phase | 6N | 5N or 7N | 12/10 |
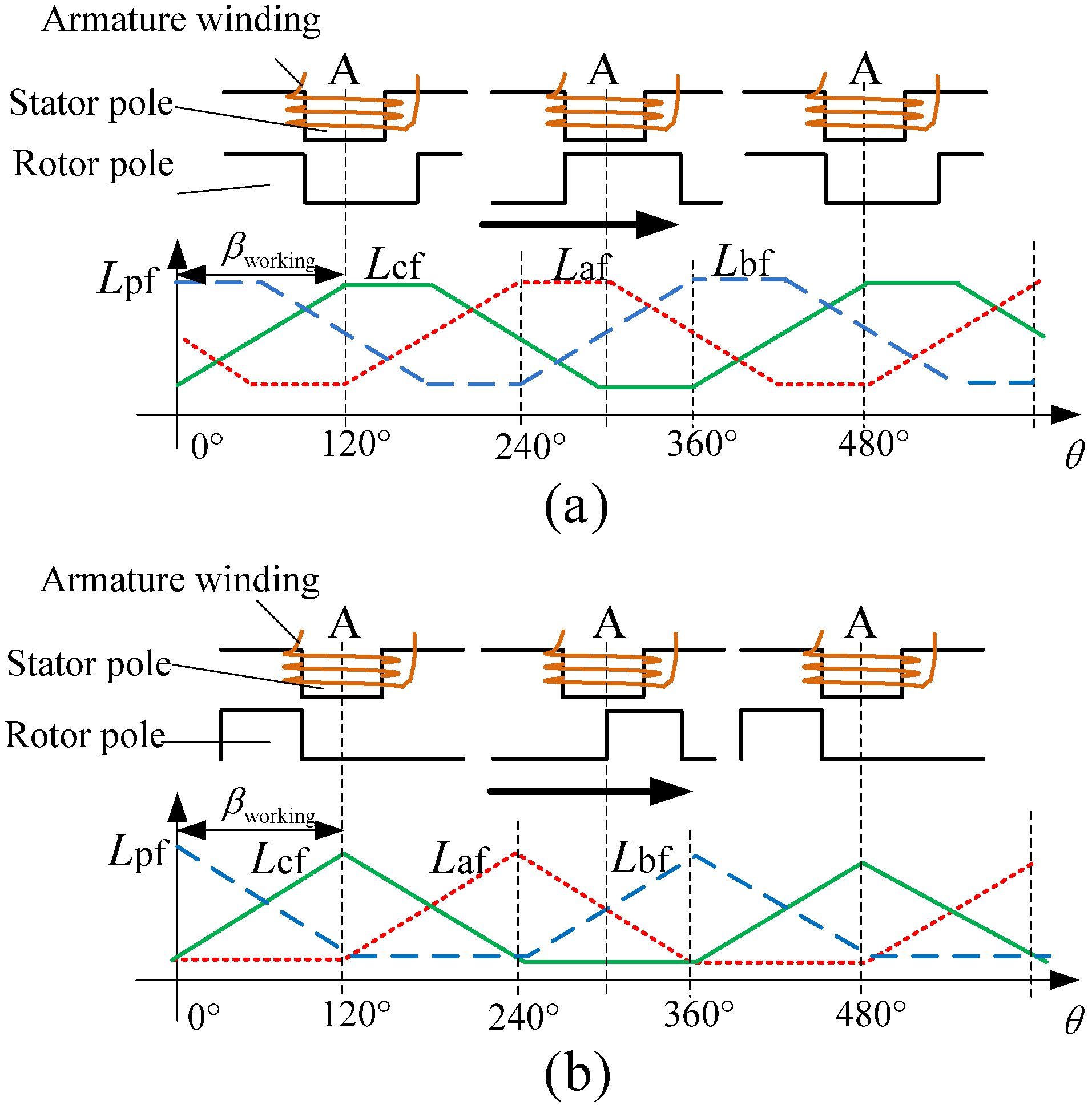
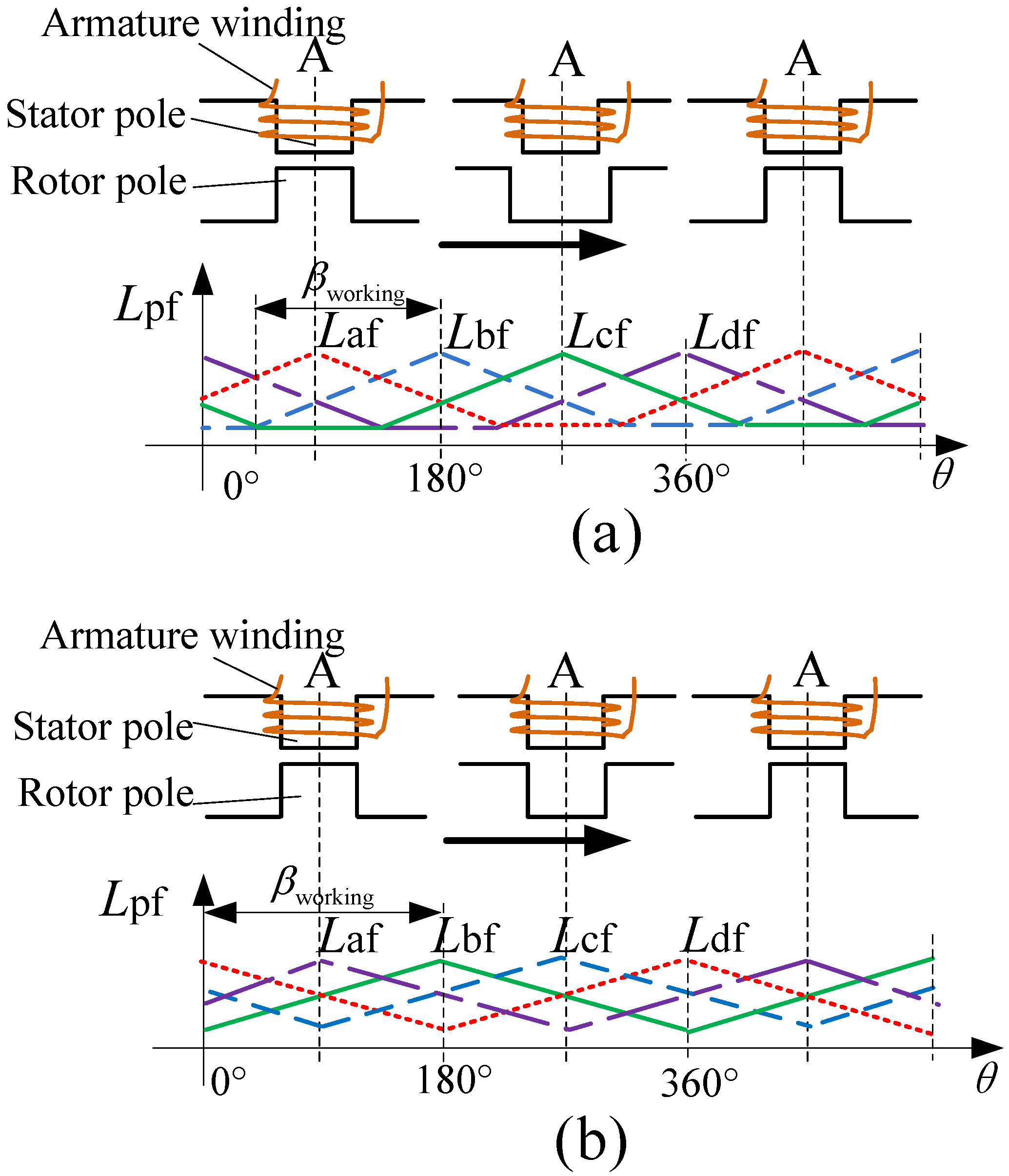
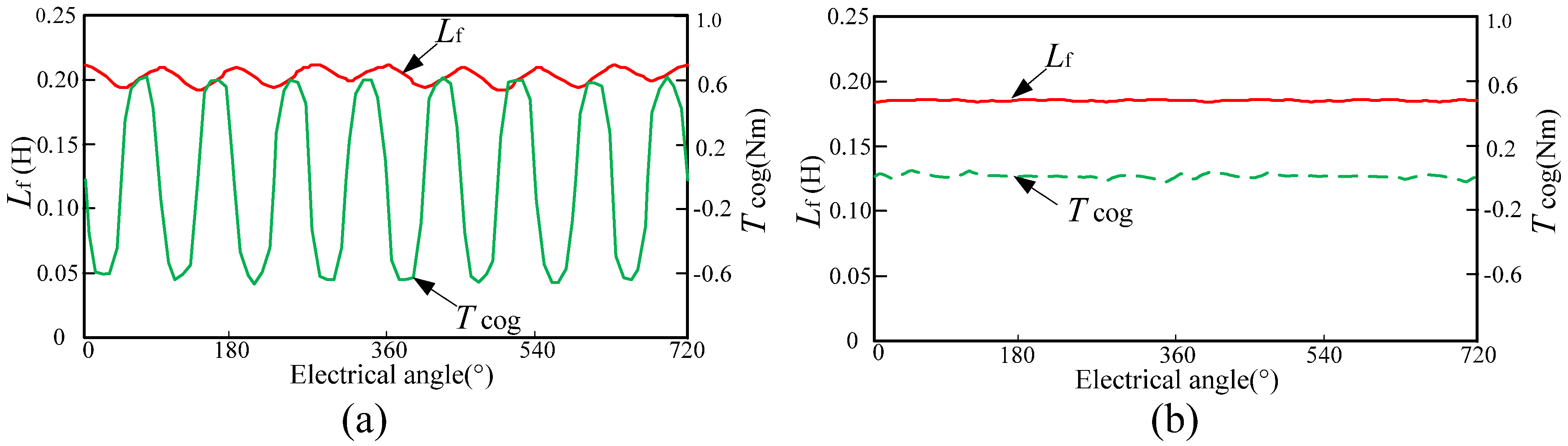
2.2. Pole Arc Coefficient


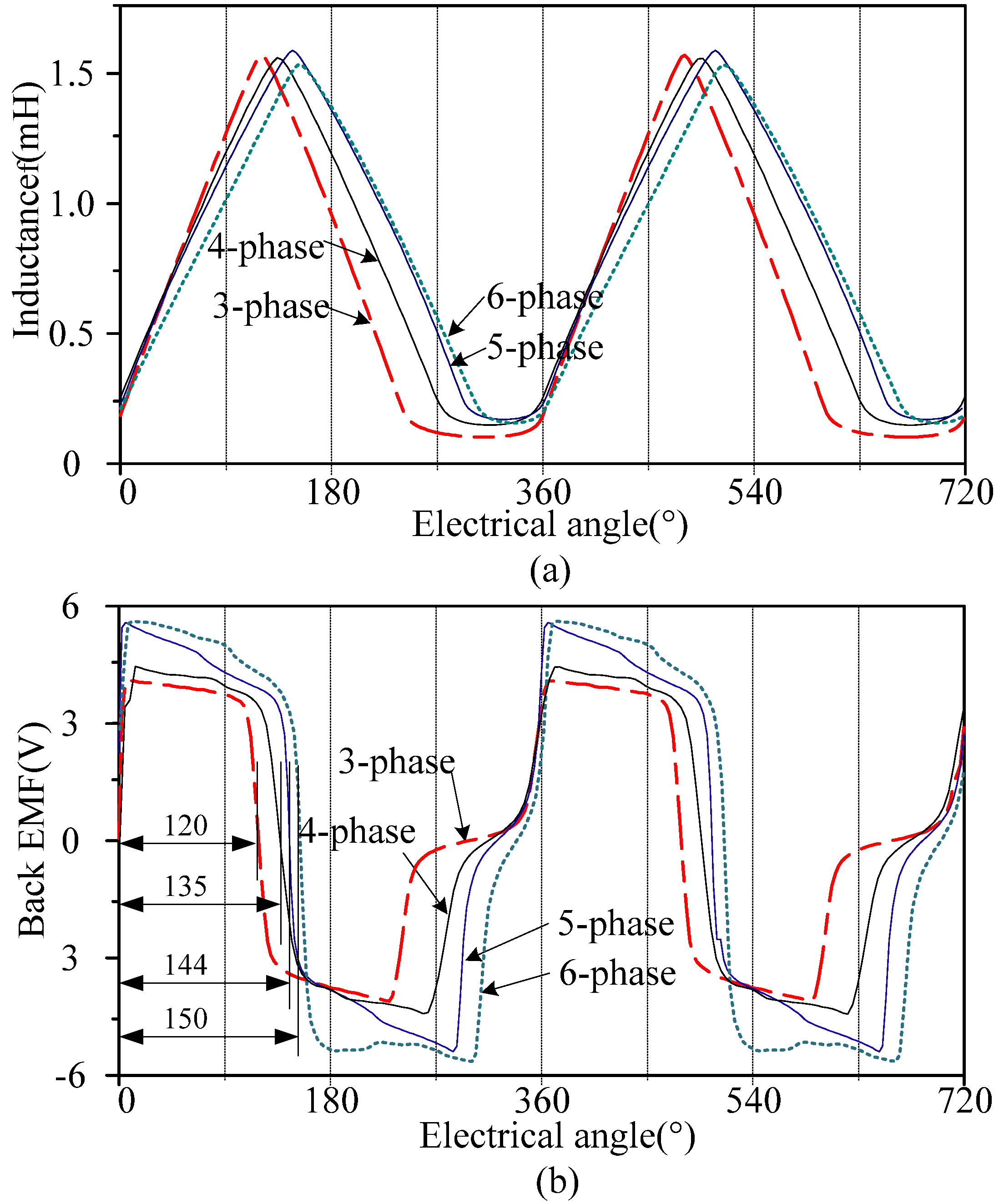
2.3. Simulation Results


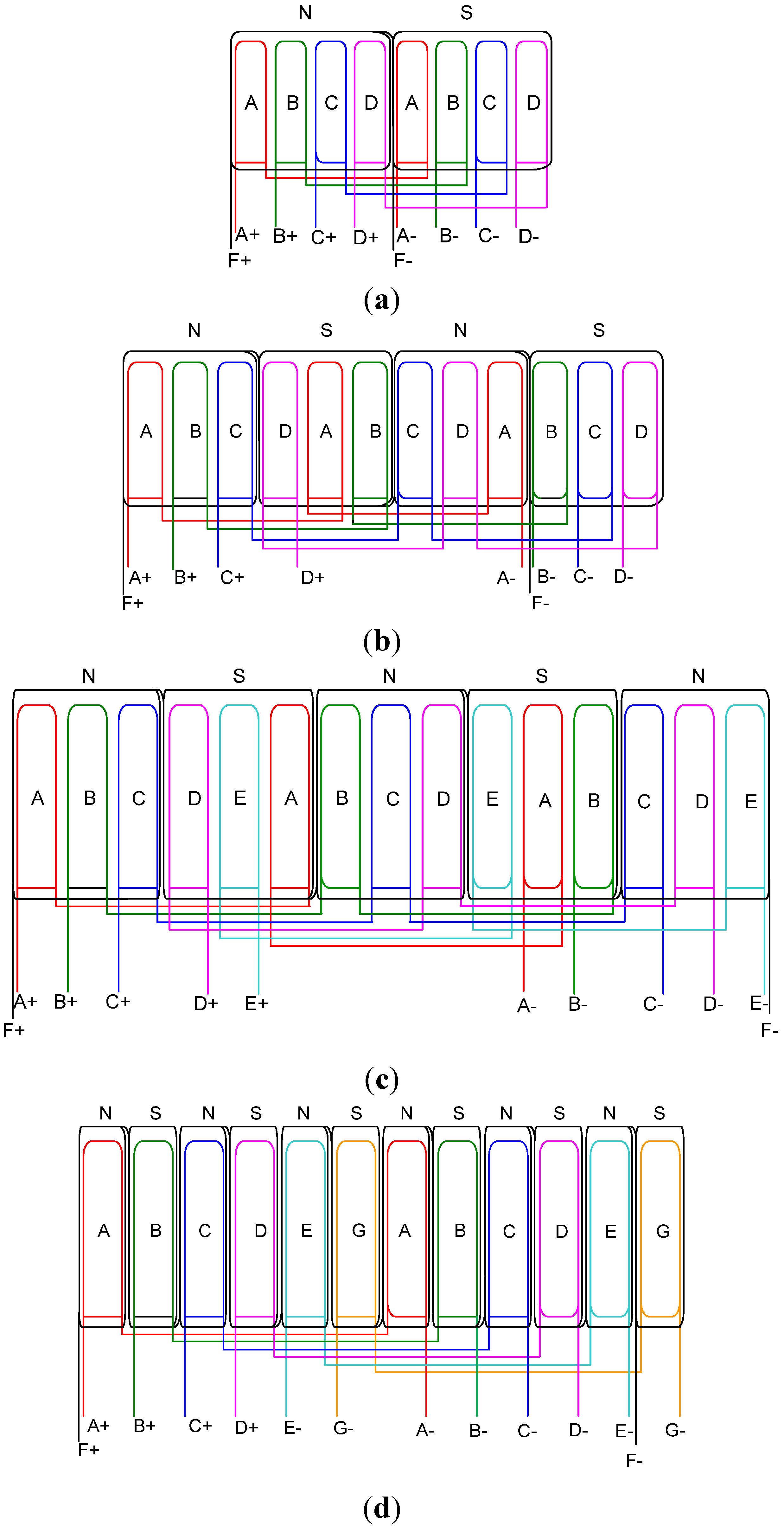
3. Comparative Study of the Symmetrical Phase Winding Configuration
3.1. The Symmetrical Phase Winding Configuration
| j | Poles of an element machine | ||
|---|---|---|---|
| Four-phase | Five-phase | Six-phase | |
| j = 1 | 8/6 | 10/8 | 12/10 |
| j = 2 | 8/6 | 10/8 | 12/10 |
| j = 3 | 12/9 | 30/24 | 12/10 |
| j = 4 | 8/6 | 40/32 | 24/20 |
| j = 5 | – | 10/8 | 30/25 |
| j = 6 | – | – | 12/10 |

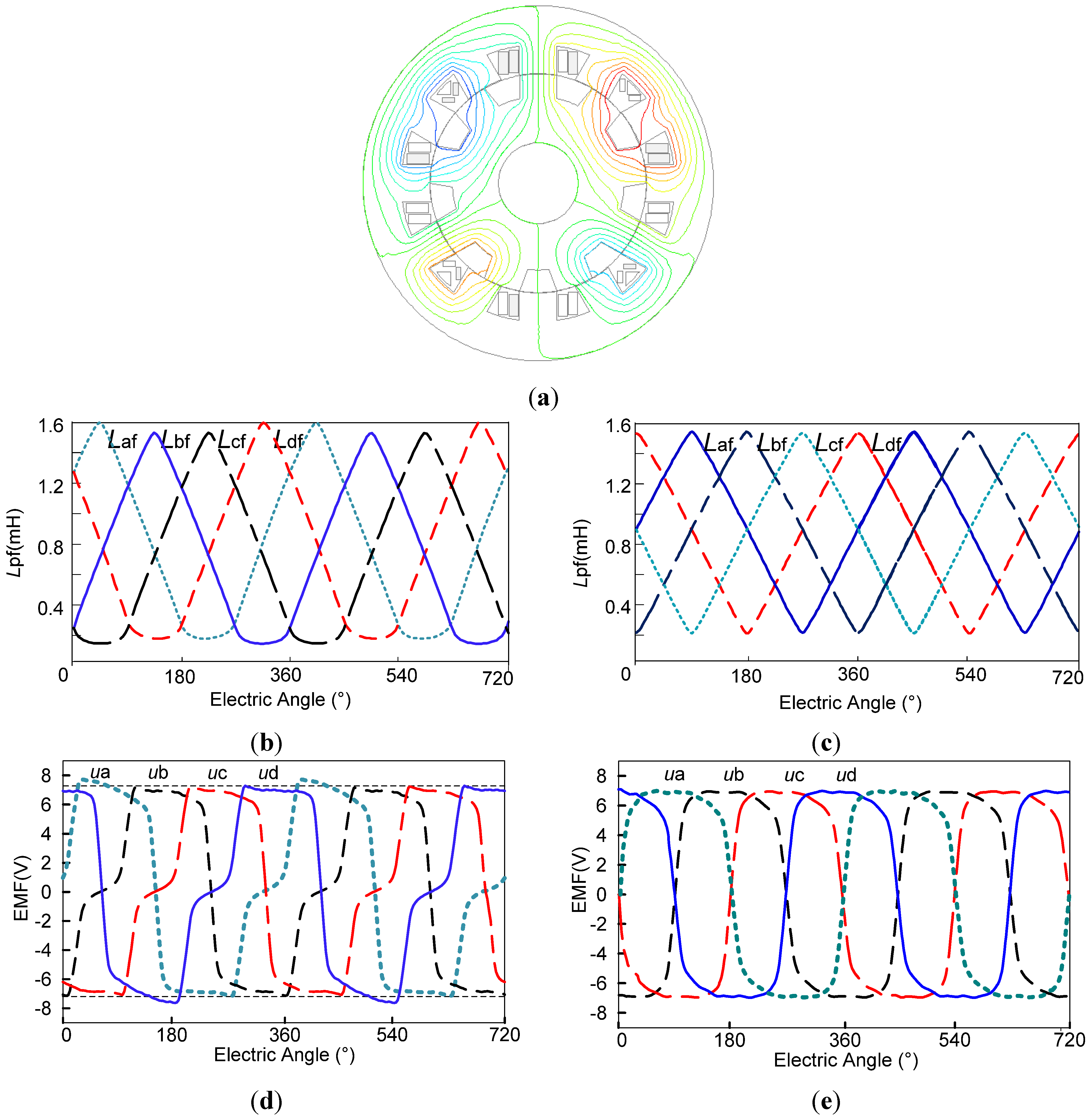
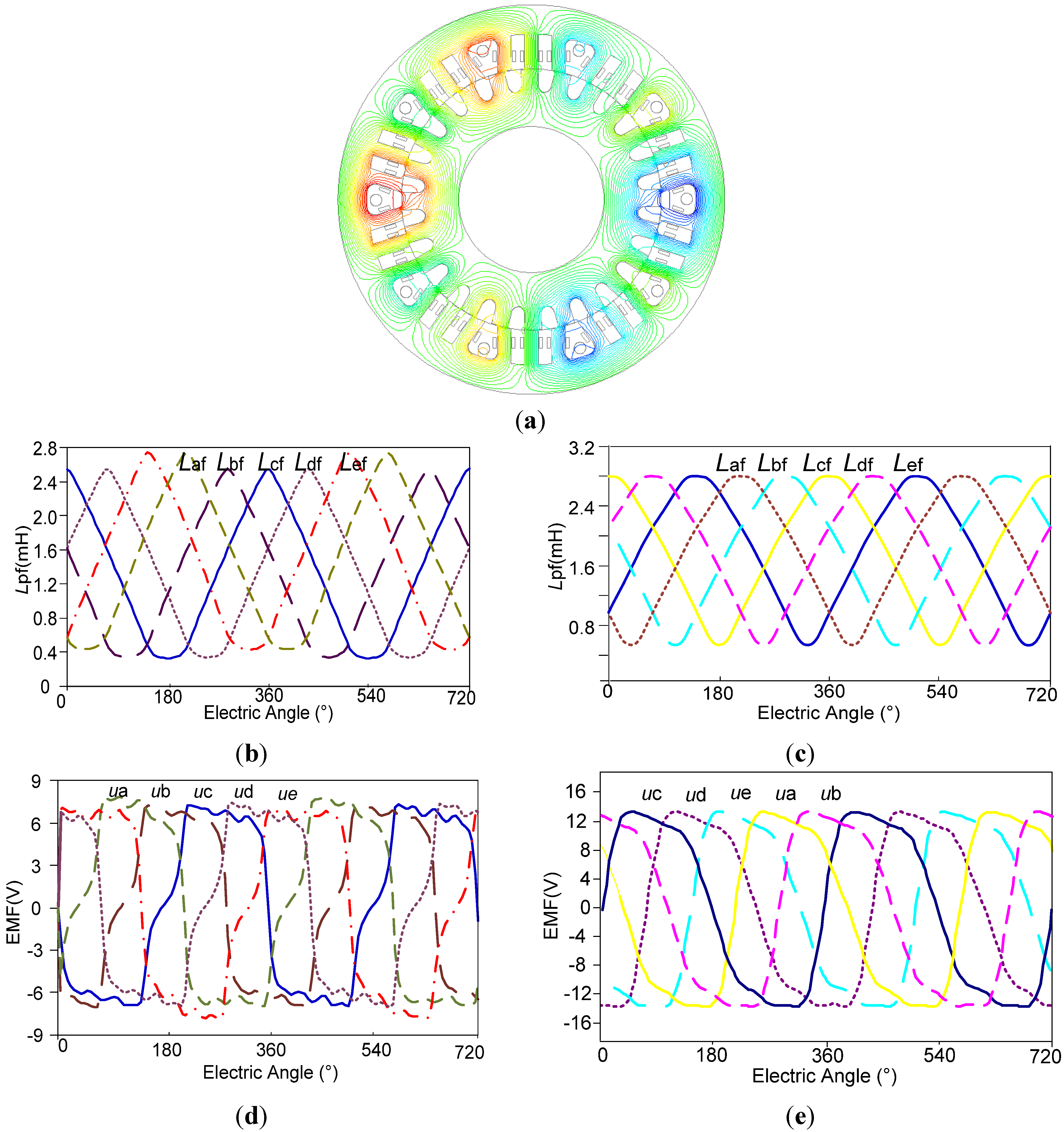
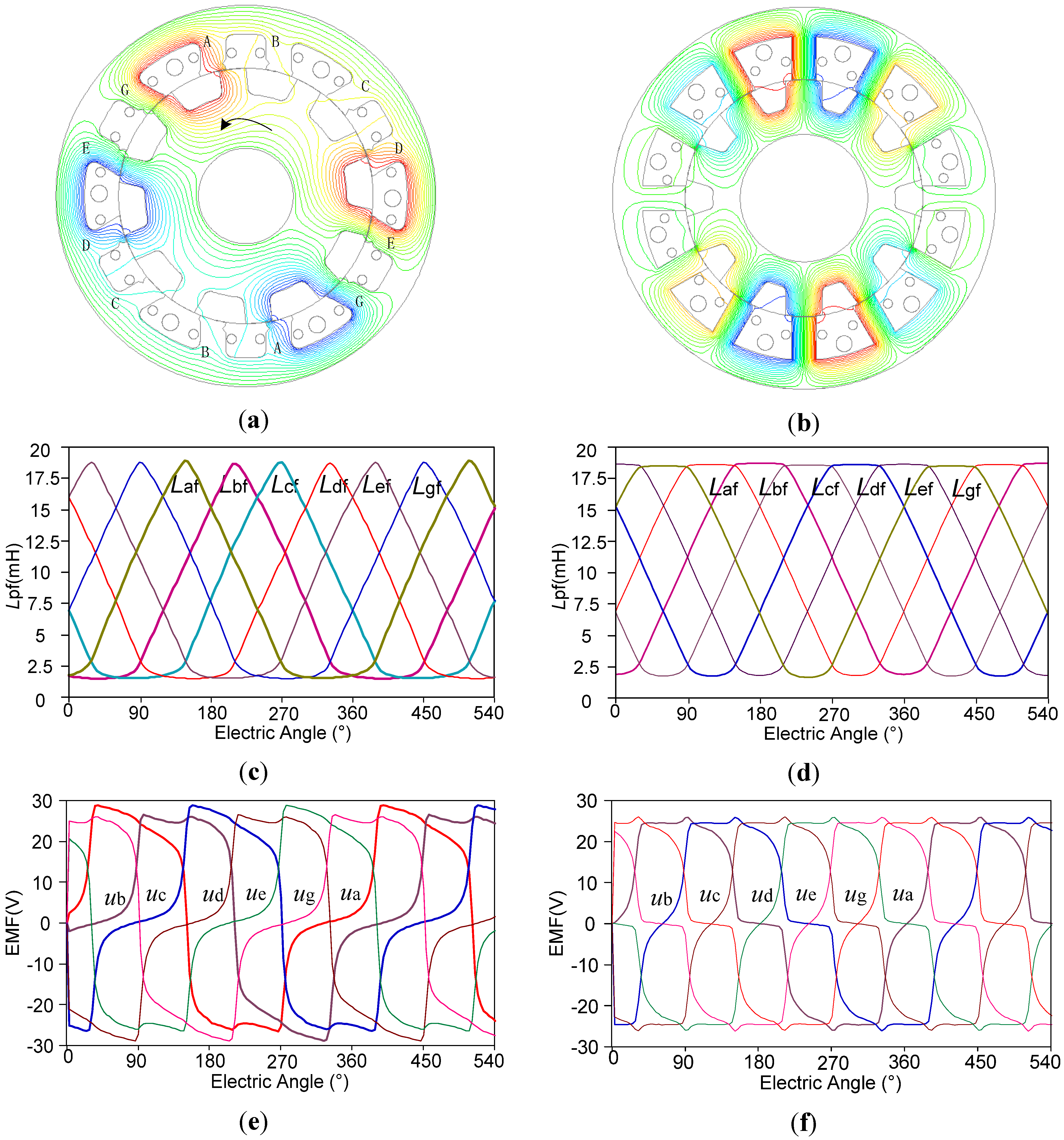
3.2. Simulation Results



4. Comparative Study of the Converter and Its Fault-Tolerant Performance
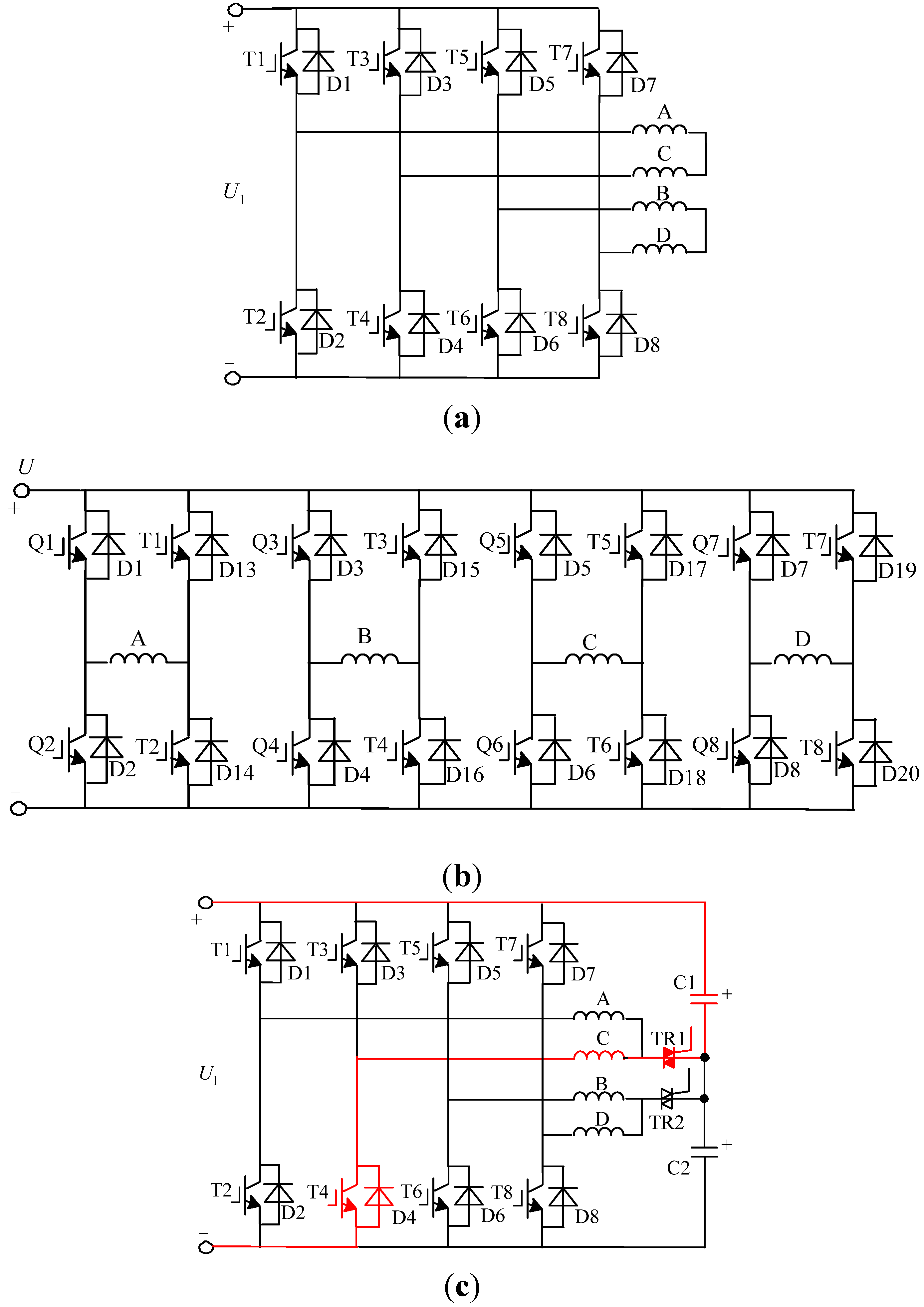
4.1. The Fault-Tolerant Converters

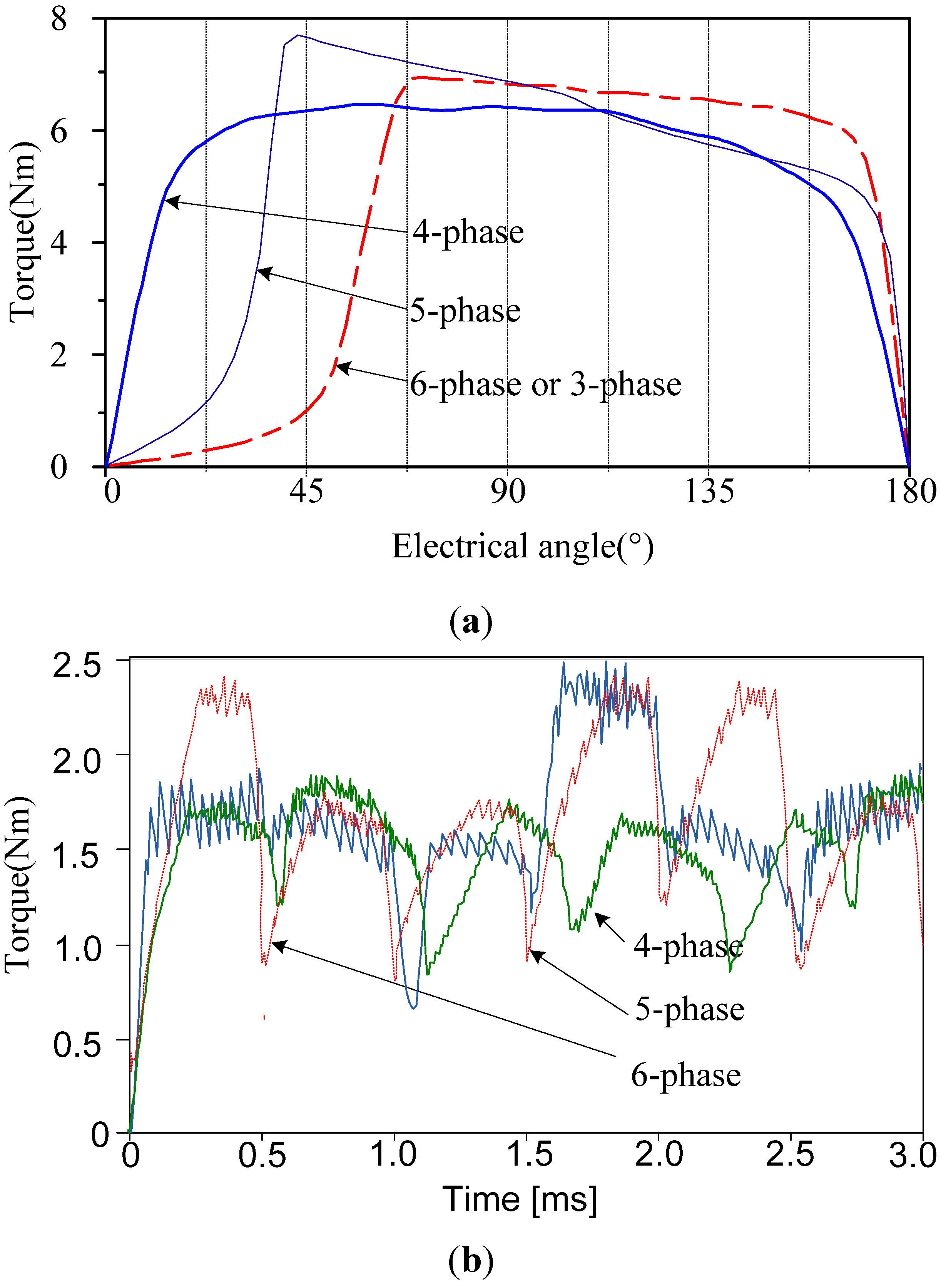
4.2. Fault-Tolerant Performance Comparison

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Villani, M.; Tursini, M.; Fabri, G.; Castellini, L. Electromechanical actuator for helicopter rotor damper application. IEEE Trans. Ind. Appl. 2014, 2, 1007–1014. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Tenconi, A.; Vaschetto, S. The safety critical electric machines and drives in the more electric aircraft: A survey. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 2987–2995.
- Bennett, J.W.; Atkinson, G.J.; Mecrow, B.C.; Atkinson, D.J. Fault-tolerant design considerations and control strategies for aerospace drives. IEEE Trans. Ind. Electron. 2012, 5, 2049–2058. [Google Scholar] [CrossRef]
- Garcia, A.; Cusido, J.; Rosero, J.A.; Ortega, J.A.; Romeral, L. Reliable electro-mechanical actuators in aircraft. IEEE Aerosp. Electron. Syst. Mag. 2008, 8, 19–25. [Google Scholar] [CrossRef]
- Villani, M.; Tursini, M.; Fabri, G.; Castellini, L. High reliability permanent magnet brushless motor drive for aircraft application. IEEE Trans. Ind. Electron. 2012, 5, 2703–2711. [Google Scholar]
- Hao, L.; Du, H.Y.I.; Lin, H.; Namuduri, C. Design and analysis of PM fractional slot machine considering the fault operation. IEEE Trans. Ind. Appl. 2014, 1, 234–243. [Google Scholar]
- Stewart, P.; Kadirkamanathan, V. Commutation of permanent-magnet synchronous AC motors for military and traction applications. IEEE Trans. Ind. Electron. 2003, 3, 629–630. [Google Scholar] [CrossRef]
- Du, Q.; Lu, E.; Shi, X. Design and analysis of five-phase tangent magnetic field permanent magnet generator for electric vehicle. Int. J. Electric Hybrid Veh. 2012, 4, 378–389. [Google Scholar] [CrossRef]
- Rottach, M.; Gerada, C.; Wheeler, P.W. Design optimisation of a fault-tolerant pm motor drive for an aerospace actuation application. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives, Manchester, UK, 8–10 April 2014; pp. 1–6.
- Cossar, C.; Kelly, L.; Miller, T.J.E.; Whitley, C.; Maxwell, C.; Moorhouse, D. The design of a switched reluctance drive for aircraft flight control surface actuation. IEE Colloq. Electr. Mach. Syst. More Electric Aircr. 1999, 11, 1–8. [Google Scholar]
- Hennen, M.D.; Hennen, M.D.; Heyers, C.; Brauer, H.J.; De Doncker, R.W. Development and control of an integrated and distributed inverter for a fault tolerant five-phase switched reluctance traction drive. IEEE Trans. Ind. Electron. 2012, 2, 547–554. [Google Scholar]
- Gong, Y.; Chau, K.T.; Jiang, J.Z.; Yu, C.; Li, W. Design of doubly salient permanent magnet motors with minimum torque ripple. IEEE Trans. Magn. 2009, 10, 4704–4707. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Yan, Y.; Tao, Y. A new topology of low speed doubly salient brushless DC generator for wind power generation. IEEE Trans. Magn. 2012, 3, 1227–1233. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, H.; Yan, Y. A doubly salient starter-generator with two-section twisted-rotor structure for potential future aerospace application. IEEE Trans. Ind. Electron. 2012, 9, 3588–3595. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Zhong, J.; Li, J. Design and analysis of a HTS brushless doubly-fed doubly-salient machine. IEEE Trans. Appl. Supercond. 2011, 3, 1119–1122. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhu, Z.Q. Electromagnetic performance of novel variable flux reluctance machines with DC-field coil in stator. IEEE Trans. Magn. 2013, 6, 3020–3028. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, Z.; Chen, Z.H. Analysis and verification of the doubly salient brushless DC generator for automobile auxiliary power unit application. IEEE Trans. Ind. Electron. 2014, 12, 6655–6663. [Google Scholar] [CrossRef]
- Sui, Y.; Zheng, P.; Wu, F.; Yu, B.; Wang, P.F.; Zhang, J.W. Research on a 20-Slot/22-Pole five-phase fault-tolerant PMSM used for four-wheel-drive electric vehicles. Energies 2014, 7, 1265–1287. [Google Scholar] [CrossRef]
- Cheng, M.; Hua, W.; Zhang, J.; Zhao, W. Overview of stator-permanent magnet brushless machines. IEEE Trans. Ind. Electron. 2011, 11, 5087–5101. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, H.; Zhao, X.; Xiao, L. Characteristics analysis of five-phase fault-tolerant doubly salient electro-magnetic generators. In Proceedings of the IECON 2013—The 39th Annual Conference of the IEEE, Vienna, Austria, 10–13 November 2013; pp. 2668–2673.
- Liu, X.; Zhu, Z.Q. Stator/Rotor pole combinations and winding configurations of variable flux reluctance machines. IEEE Trans. Ind. Appl. 2014, 6, 3675–3684. [Google Scholar] [CrossRef]
- Shi, J.T.; Liu, X.; Wu, D.; Zhu, Z.Q. Influence of stator and rotor pole arcs on electromagnetic torque of variable flux reluctance machines. IEEE Trans. Magn. 2014, 11. [Google Scholar] [CrossRef]
- Gaussens, B.; Hoang, E.; Barrière, O.D.; Saint-Michel, J.; Lecrivain, M.; Gabsi, M. Analytical approach for air-gap modeling of field-excited flux-switching machine: No-load operation. IEEE Trans. Magn. 2012, 9, 2505–2517. [Google Scholar] [CrossRef]
- Hill, C.I.; Zanchetta, P.; Bozhko, S.V. Accelerated electromechanical modeling of a distributed internal combustion engine generator unit. Energies 2012, 5, 2232–2247. [Google Scholar] [CrossRef]
- Bojoi, R.; Neacsu, M.G.; Tenconi, A. Analysis and survey of multi-phase power electronic converter topologies for the more electric aircraft applications. In Proceedings of the 2012 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 20–22 June 2012; pp. 440–445.
- Chen, Z.; Chen, R.; Chen, Z. A fault-tolerant parallel structure of single-phase full-bridge rectifiers for a wound-field doubly salient generator. IEEE Trans. Ind. Electron. 2013, 8, 2988–2995. [Google Scholar] [CrossRef]
- Qin, H.; Wen, J.; Zhou, B.; Xue, H.H. Considerations of harmonic and torque ripple in a large power doubly salient electro-magnet motor drive. In Proceedings of the 2012 Asia-Pacific Symposium on Electromagnetic Compatibility (APEMC), Singapore, 22–24 May 2012; pp. 649–652.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, L.-W.; Zhou, B. Comparative Study of a Fault-Tolerant Multiphase Wound-Field Doubly Salient Machine for Electrical Actuators. Energies 2015, 8, 3640-3660. https://doi.org/10.3390/en8053640
Shi L-W, Zhou B. Comparative Study of a Fault-Tolerant Multiphase Wound-Field Doubly Salient Machine for Electrical Actuators. Energies. 2015; 8(5):3640-3660. https://doi.org/10.3390/en8053640
Chicago/Turabian StyleShi, Li-Wei, and Bo Zhou. 2015. "Comparative Study of a Fault-Tolerant Multiphase Wound-Field Doubly Salient Machine for Electrical Actuators" Energies 8, no. 5: 3640-3660. https://doi.org/10.3390/en8053640