1. Introduction
In recent years, Electric Vehicle (EV) technologies have developed rapidly with the high attention from governments all over the world. In China, the government document, Energy Saving and New Energy Vehicles Industry Development Planning (2011–2020), put forward that the number of EVs should reach 5 million in 2020, and according to the research report from the Ministry of Industry and Information Technology, the figure is predicted to be 60 million in 2030 [
1]. At the same time, with the development of the EV industry, related charging facilities must be built to meet the anticipated significantly increased charging demand. There are also many local plans for the construction of charging stations, chargers and intelligent charging service system, such as in Beijing, Shenzhen.
As pioneers, electric buses and electric taxis are first to be demonstrated for utilization of EVs. In Shenzhen, an EV charging network has been set up with electric buses, electric taxis, charging stations and related charging services.
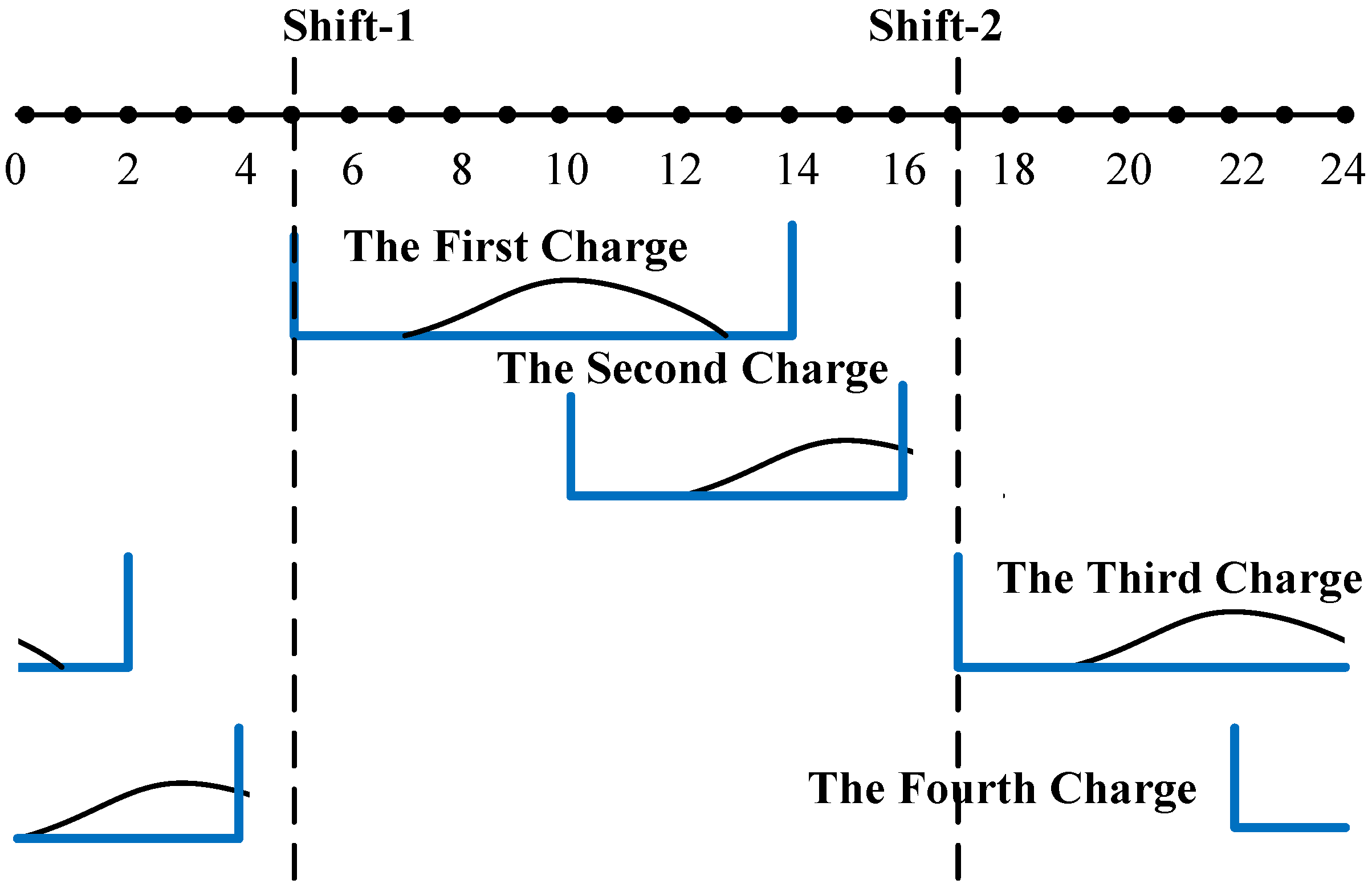
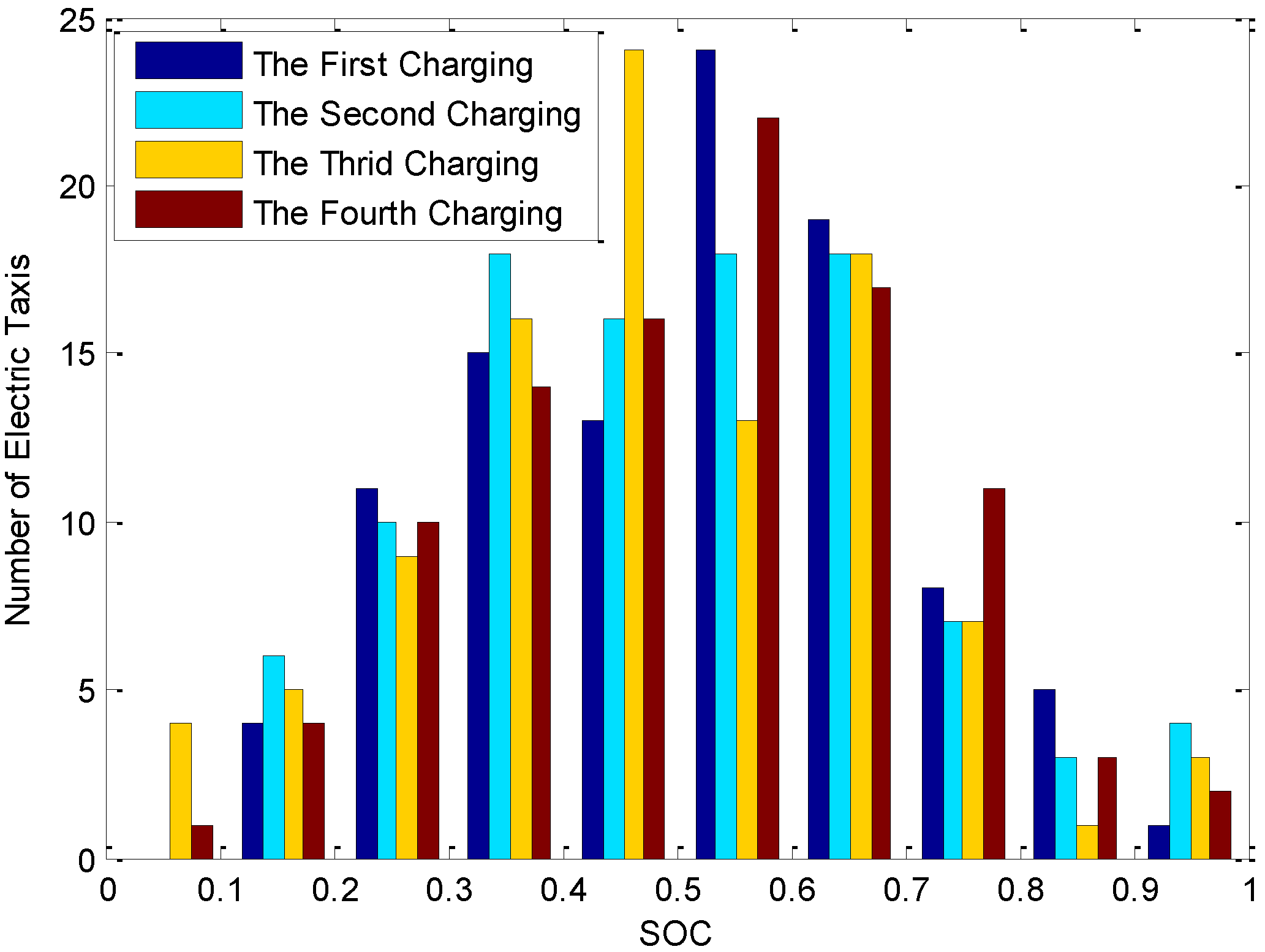
In this paper, only electric taxis are considered. After running for a while, some issues have arisen with the operation of electric taxis. According to investigation of operational data from Shenzhen, taxi drivers work two shifts, one for day-time, the other for night. The shift-swapping time and position are not strict, but are usually around 5:00/17:00 and somewhere near the drivers’ places. In terms of the hidden rules that electric taxis should start with full State of Charge (SOC), two charging peaks occur before the work shifts. Moreover, charging twice is not enough to operate for the whole day, and another two charges are needed during the operation periods. All of these facts result in four load peaks in the temporal scale. At the same time, unbalanced distribution in the spatial scale also arises for the reason that most drivers prefer the charging station to be near their places.
If the charging load distribution of EVs is unbalanced in either the temporal or spatial scale, the utilization efficiency of charging facilities will be much lower. It may also trigger some relative load unbalance problems when EV load penetration gets higher, for example, more charging costs for drivers and more feeder losses in regional power systems.
Some researchers have proposed some charging strategies to solve similar electric taxi operation problems. In [
2], with some investigation of EV taxi data from Shenzhen, the authors understood that the status (e.g., operational patterns, driver income and charging behaviors) of EV taxis can provide invaluable information to policy makers and studied the patterns from two aspects: operational behaviors and charging behaviors, but a rescheduling strategy was not proposed. In [
3,
4,
5,
6], the research group mainly focused on maximizing the profit to reach optimal charging for electric taxis, minimizing their charging cost in face of time-varying electricity prices and some pricing schemes for electric taxis to track the load profile, whose scope is mainly for cost or benefit optimization from a temporal perspective without consideration of the spatial scope. Besides, other work [
7] proposed a facility optimization model to minimize the life circle cost (LCC) of charging/swapping facilities, the time value of electric taxis under the constraints of queuing model and the price spread between oil and electricity. A new dispatching policy also presented in [
8] with consideration of the taxi demand, the remaining power of electrical taxis, and the availability of battery charging/switching stations in order to reduce the waiting time for power recharging and thus increase the workable hours for taxi drivers.
Most of the works above have a relatively narrow vision for electric taxis. In this paper, we summarize the problems of electric taxi operation to be on a temporal and spatial scale. Moreover, the issue of coordinated charging for electric taxis at both scales was modeled by using a multi-objective approach based on three separate objectives: maximizing the utilization efficiency of charging facilities, minimizing the load unbalance co-operated with the regional power system and minimizing the customers’ cost. Then the problem was solved by a fuzzy mathematical method and Improved PSO algorithm.
In summary, the originality of this paper, as well as the differences between the proposed strategy and the EV optimization in the literature, is: (i) in this paper, with the investigation of electric taxis operated in Shenzhen, most of the settings are assumed based on real operation data. The optimization formulation proposed is oriented to handle the practical problems arising from real electric taxi operation; (ii) in the previous research, electric taxi optimization was formulated for electricity cost, or for the charging facilities, or for the customer demands, but those studies only considered this issue from specific perspective. This paper proposes an integrated strategy for electric taxis’ coordinated charging, considering the charging facilities, charging load influence related to the regional power system and customers’ composite cost; and (iii) most previous research only considers the electric taxi optimization problem from a time perspective. This paper explored the electric taxi charging problem with different visions, with a temporal, spatial and combined scope, so the new strategy involves the solution of a multi-objective and multi-scale constrained optimization model for coordinated charging.
Furthermore, we focused mainly on coordinated charging for electric taxis. However, the proposed procedure can also be extended easily to other types of EV users, e.g., commuting EVs charging at stations. The remainder of this paper is organized as follows:
Section 2 formulates our coordinated charging model and shows the strategy proposed for solving the mentioned charging problem;
Section 3 presents the mathematical methodology to solve the proposed model, fuzzy method and Improved PSO algorithm. Our simulations for different cases are presented in
Section 4.
Section 5 summarizes the conclusions.
2. Coordinated Charging Strategy
In this paper, the proposed strategy is oriented to tackle the unbalance problem in the temporal and spatial domain.
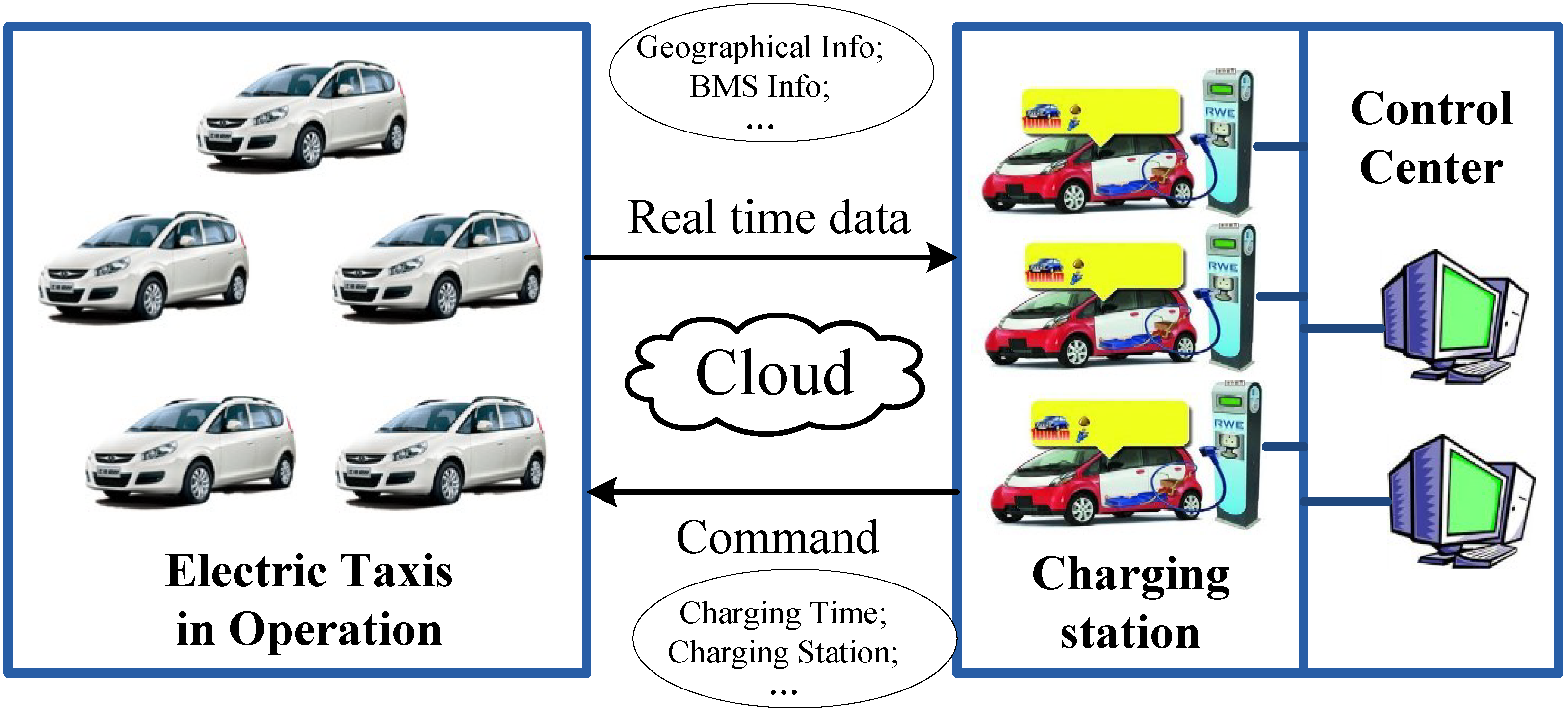
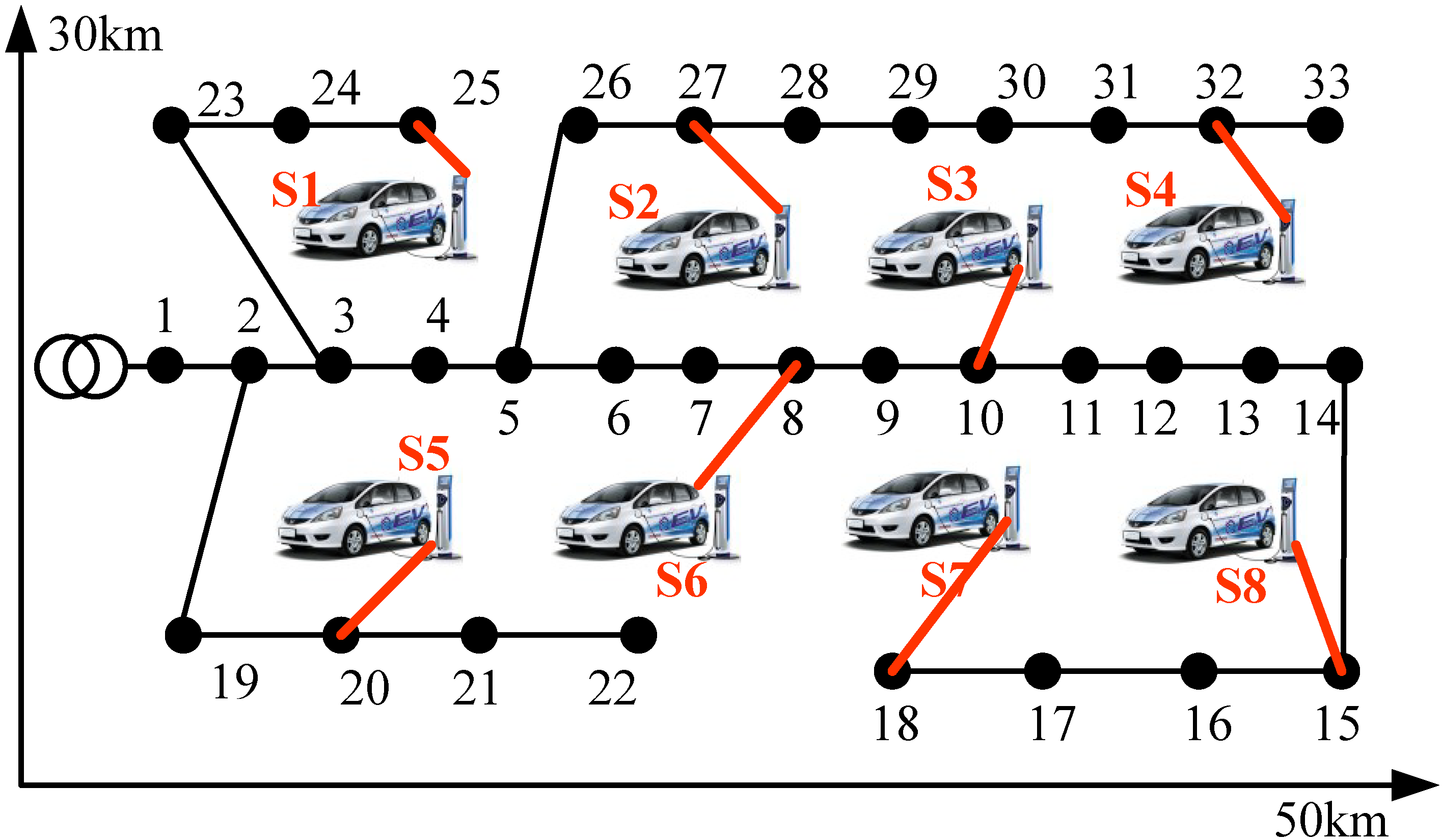
Figure 1 shows the relationship and communication between electric taxis and charging stations. Electric taxis would send the real time data to a charging station through 3G/4G, including geographical information, battery management information and operation information. The charging station would send the command of the time and station to charge for each electric taxi after the optimization procedure.
The main purpose of the coordinated charging for electric taxis is to determine the optimal time and the optimal station to charge. More preciously, for coordinated charging in the temporal scale, the objective is to seek the best time period to charge; and for coordinated charging in the spatial scale, the objective is to find the best station to charge. The coordinated charging variable, the time period and station to charge, would be optimized under minimizing or maximizing one or more objective functions while satisfying the several equality and inequality constraints. Its mathematical model can established as:
where,
f is the objective function to be optimized;
g and
h are the equality and inequality constrains, respectively;
x is the vector of time or station selection variable.
Figure 1.
Framework of charging station and electric taxis.
Figure 1.
Framework of charging station and electric taxis.
In this paper, three optimization objectives are put forward for electric taxis’ coordinated charging, including maximizing the utilization efficiency of charging facilities, minimizing the load unbalance in the regional power system and minimizing the customers’ cost. Their mathematical models and constraints are described as follows.
2.1. Objective Functions
2.1.1. Maximizing the Utilization Efficiency of Charging Facilities
In terms of the operation characteristics of electric taxis, the unbalanced utilization of charging equipment leads to most electric taxis turning to charge at a certain period of time or at a certain station, which reduces the temporal and spatial utilization rate of the charging equipment. From the perspective of charging station operators, in order to improve the utilization efficiency of charging infrastructure in temporal and spatial scale, a scheme should be proposed to average the temporal and spatial characteristic of charging behaviors, which is shown as below:
where,
M and
N is the number of electric taxis and stations in this region, respectively;
T is the simulation duration;
xm,t and
xm,n are the selection variable for temporal and spatial optimization. Besides,
Pm is the charging power of electric taxi
m; and
Cn is the number of chargers in charging station
n.
2.1.2. Minimizing the Load Unbalance in the Regional Power System
The unbalanced charging load will also lead to an uneven distribution in the regional power system in both the temporal and spatial scale. The corresponding bad side impact is higher power losses that are one of the most important issues for power system operation. By this means, minimizing power losses is also considered to be an objective, shown as below:
where,
Ploss and
Qloss are the active and reactive power loss and
t and
nbrh are the time point and branch number, respectively.
However, to obtain
Ploss and
Qloss, the power flow calculation should be involved, which would severely delay the calculation speed for optimization. Additionally,
Qloss is usually neglected after the power factor correction. To simplify the model, based on the conclusions shown in [
9,
10] that the power losses are approximately linearly related to load variance in a radial power system, we extended load variance from the temporal scale to the spatial scale, and use this value to estimate power losses in the regional power system:
where,
and
are the active load of regional power system in period
t; active load of
nbus, respectively. Besides,
and
are the average active power in the corresponding scale.
2.1.3. Minimizing the Customers’ Cost
Electric taxis are operated for making profits, however, the charging cost is one of the basic costs for electric taxis, just like the oil expense for fuel vehicles. Besides, the charging procedure, which needs at least two hours with 1/2C charging rate from 0% to 100% Battery State of Charge (
SOC), is not like refilling the oil. In this way, the time cost (the charging time and the time waiting to charge) and travel cost (travel to charging station) are also involved into the cost function, which is depicted below,
where,
Ctime,
Ctravel and
Cutility are the cost of time, travel and the electricity bills, respectively (Unit:RMB). This equation could be used in the three scales above. For the details:
In the equation above, Tc and Tw represent the time to charging and to wait for charging (Unit: h); Ltravel means the travel distance to the station for charging (Unit: km); α, β are the price coefficients of time and travelling; ct, cn are the service price of charging station in each period and each station (unit: RMB/kWh).
Besides, the EV battery cost (e.g., degradation and replacement) is not considered in this paper, because the optimizing formulation proposed is to operate the electric taxi charging issue for both temporal and spatial scale in the period duration of one day. The EV battery degradation and replacement cost in one day is negligible, compared to the operation cost for the whole day, so to simplify this paper, the battery degradation cost has been neglected.
2.2. Constraints
2.2.1. Constraints with Electric Taxi Operation
(1) In the strategy proposed, the electric taxis have limited charging times for one simulation duration. For example, we consider 24 h to be one simulation duration, which also serves as two shifts for taxi operation, and four times is the charging limitation:
(2) Besides, the electric taxi drivers who are willing to charge have
N options to choose the station, but only one could be the final decision:
(3) Next, to make sure enough electricity for the electric taxi reaches the assigned charging station, the travel distance during each charging interval should be less than the driving mileage (DM) of the electric taxi. In Equation (14), the
Loperation is the electric taxis’ operation distance between two adjacent chargings is:
2.2.2. Electric Taxi Battery Constraints
(1) For the Charging Power, the charging power for a single charger is also constrained by the capability of the charging facilities. The limitation is shown as follows:
where,
and
are the bottom and upper power limit of the charger.
(2) For
SOC of battery, the
SOC of battery also has some constraints:
where,
is the bottom power limit of
SOC;
is the upper power limit of
SOC;
is the
SOC of vehicle
m in period
t.
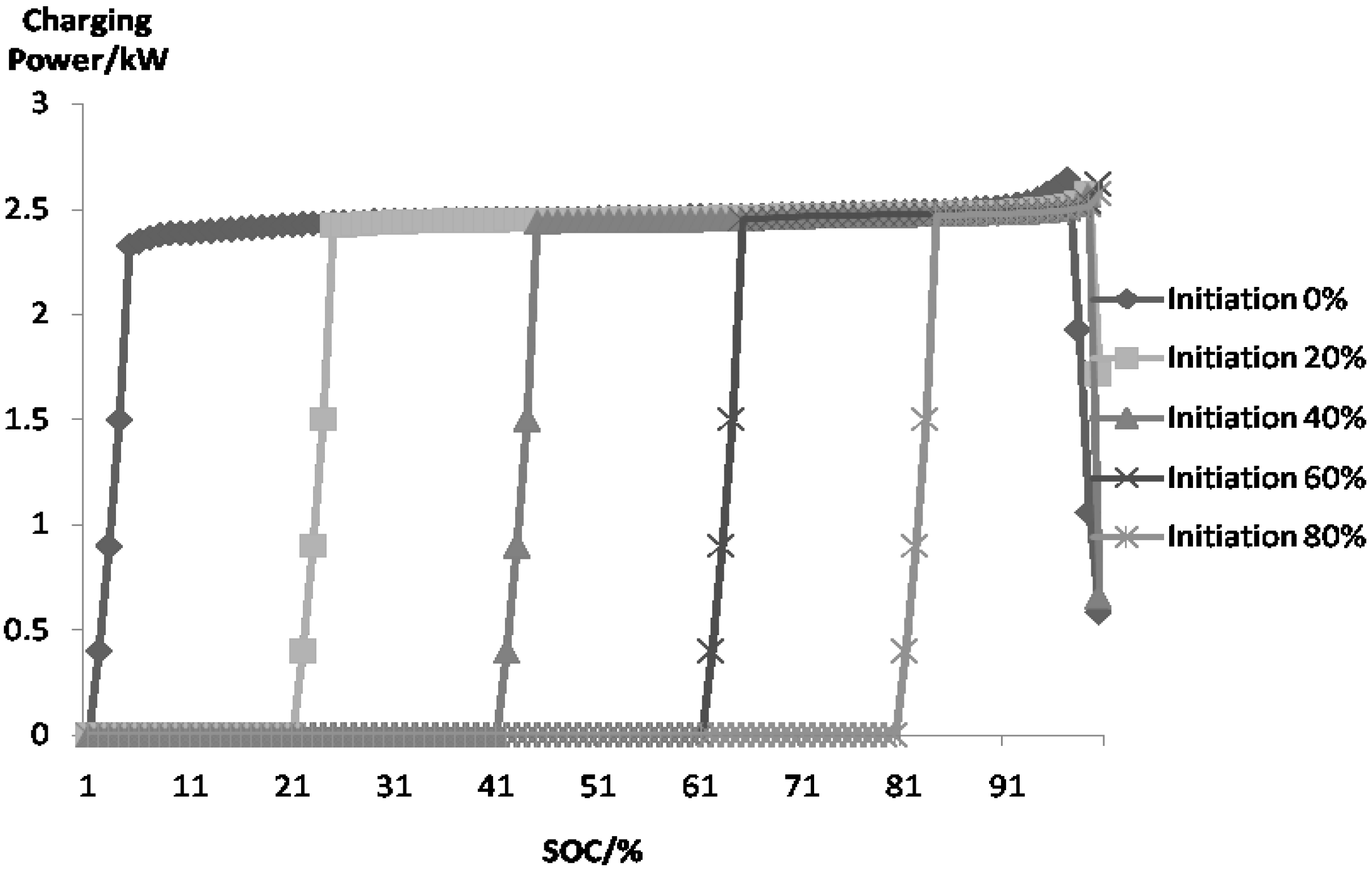
(3) Next, as the experiment data indicates, lithium battery charging is usually done in the Constant Current Constant Voltage mode [
11,
12]. Shown in
Figure 2, the five charging profiles are overlapped no matter what the value of the original
SOC is. In this way, we can draw the conclusion that the entire charging pattern is fixed as the initiation of 0%, and any charging power profile with a certain initial
SOC could be decided by the entire charging pattern and its value of initial
SOC [
13].
Figure 2.
The charging pattern of various SOC at the beginning of charging.
Figure 2.
The charging pattern of various SOC at the beginning of charging.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







