
A Comparative Study of the Kalman Filter and the LSTM Network for the Remaining Useful Life Prediction of SOFC

Abstract
:1. Introduction
- (1)
- The Kalman filtering (KF) and LSTM networks are used to predict the RUL of SOFC, respectively. Moreover, the prediction effects are compared and analyzed in detail.
- (2)
- The linear degradation model of the SOFC system is established by taking the degradation resistance as the health index, and the accurate KF estimation provides a good foundation for predicting SOFC RUL.
- (3)
- The multi-step-ahead recursive strategy of updating the network state with actual test data improves prediction accuracy, enhancing the practical application value.
2. Experimental Configurations and Data Acquisition
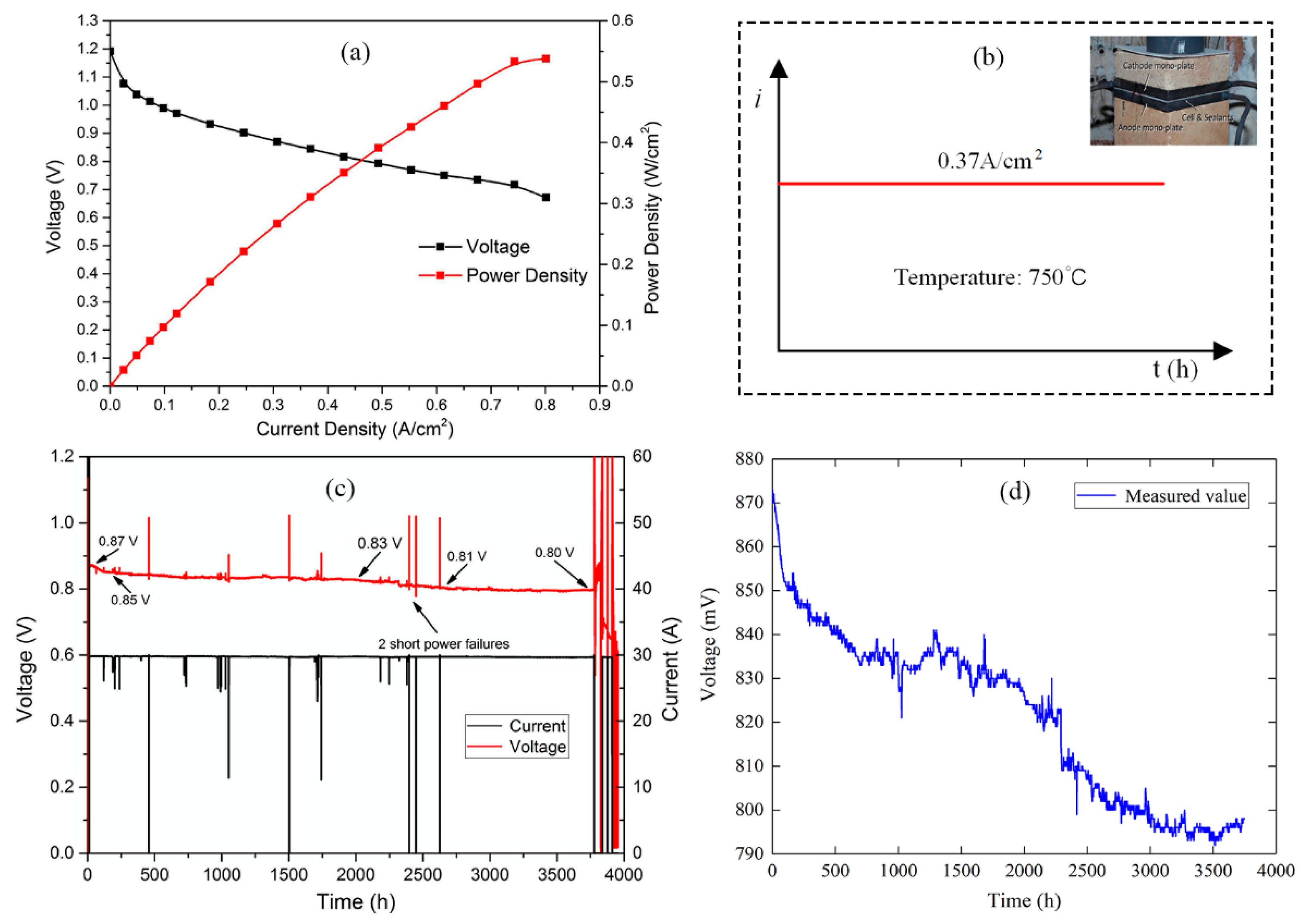
2.1. Experimental Platform
2.2. Experimental Data Acquisition
3. RUL Prediction Methods
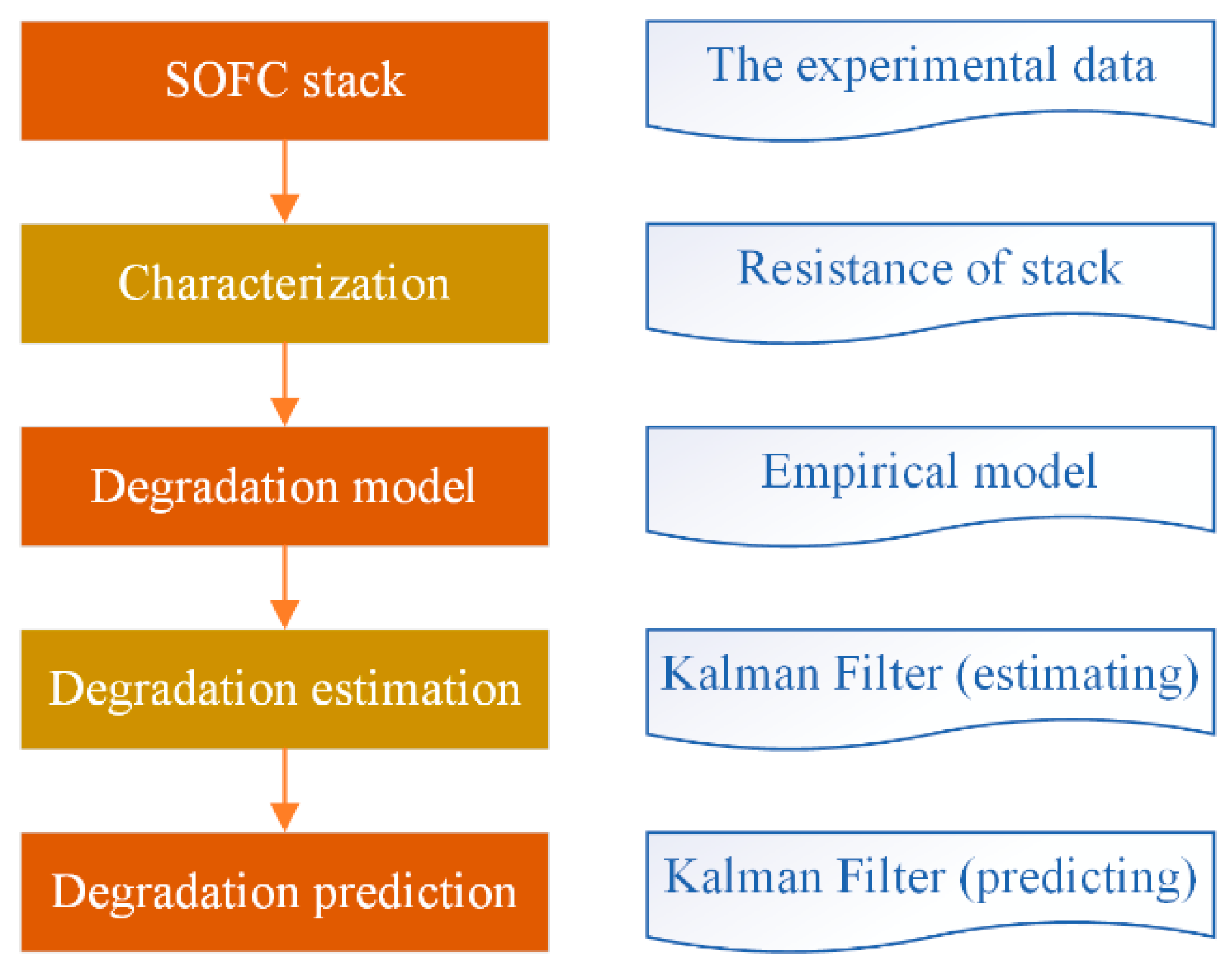
3.1. The Model-Based RUL Prediction Method
3.1.1. SOFC Degradation Model
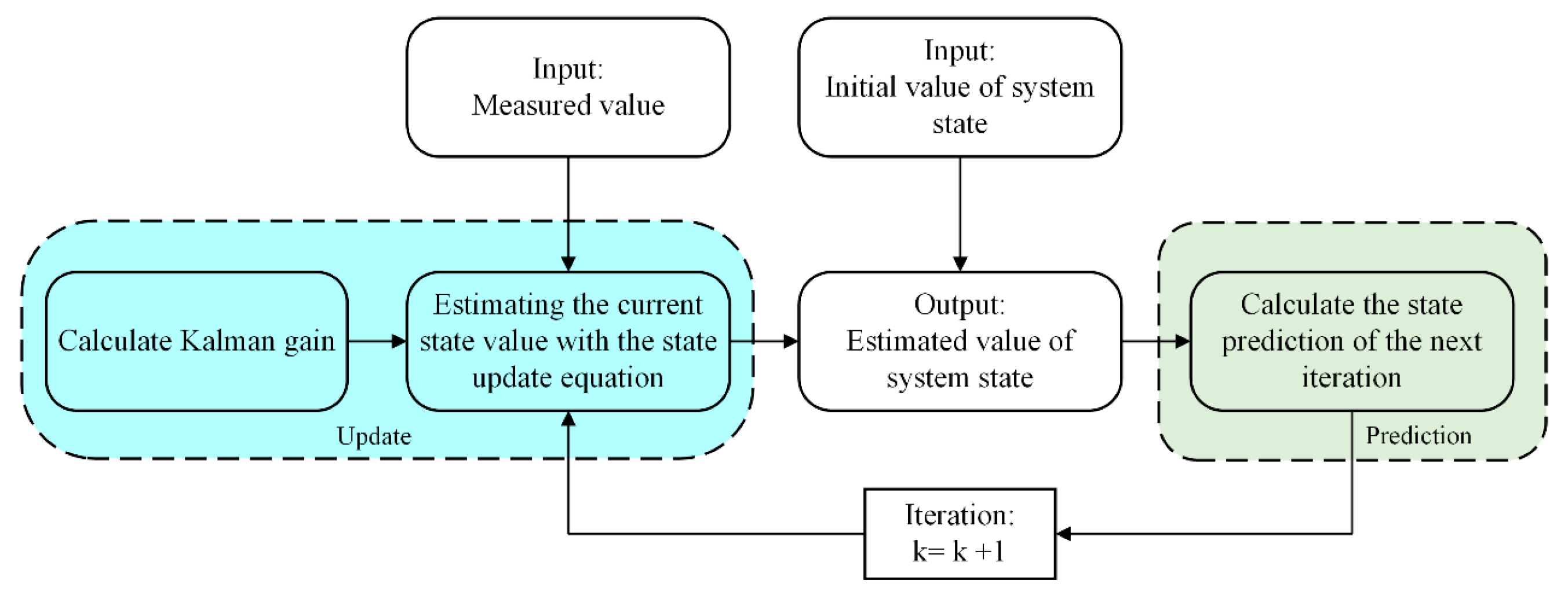
3.1.2. Health State Estimation Based on the Kalman Filter
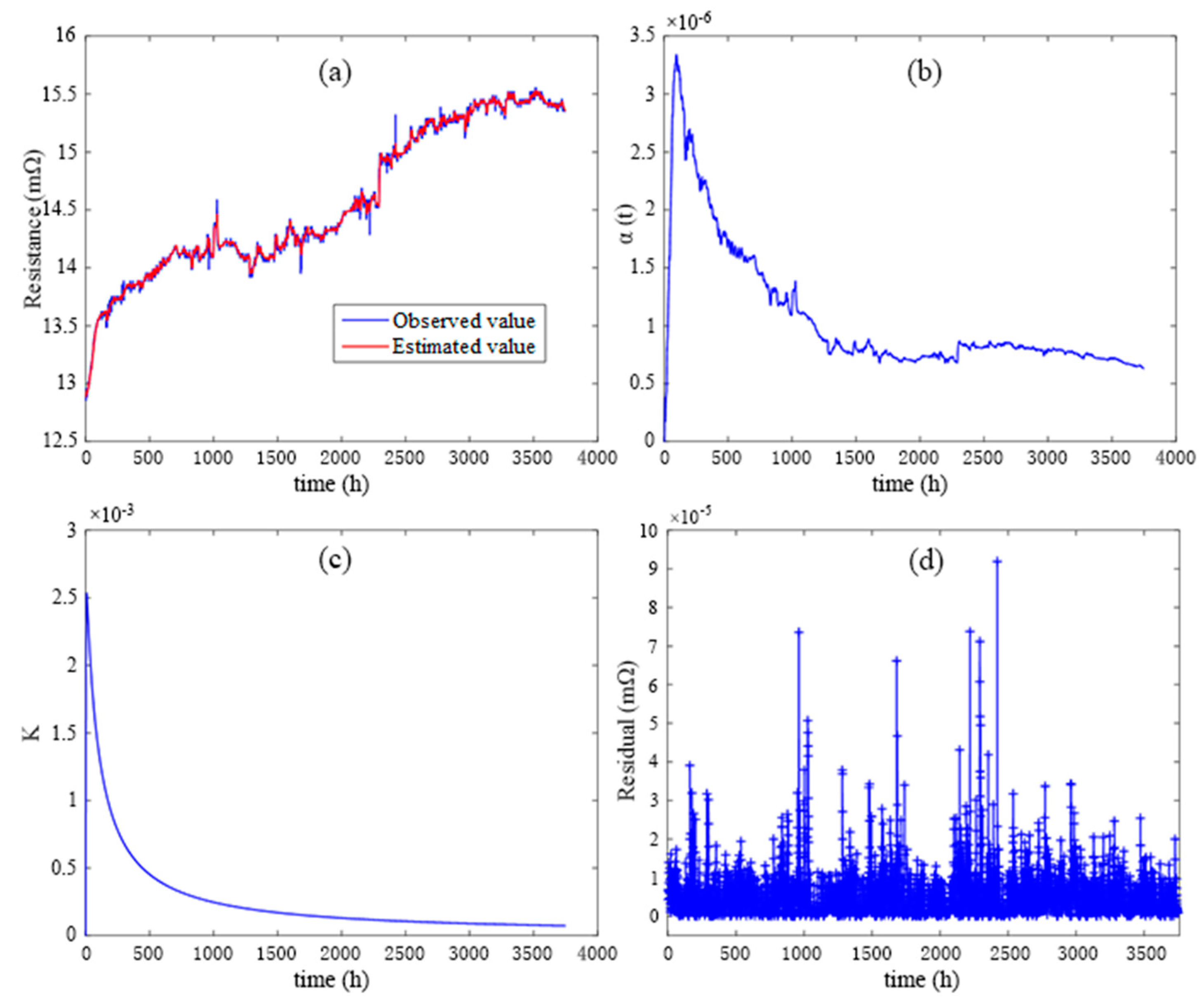
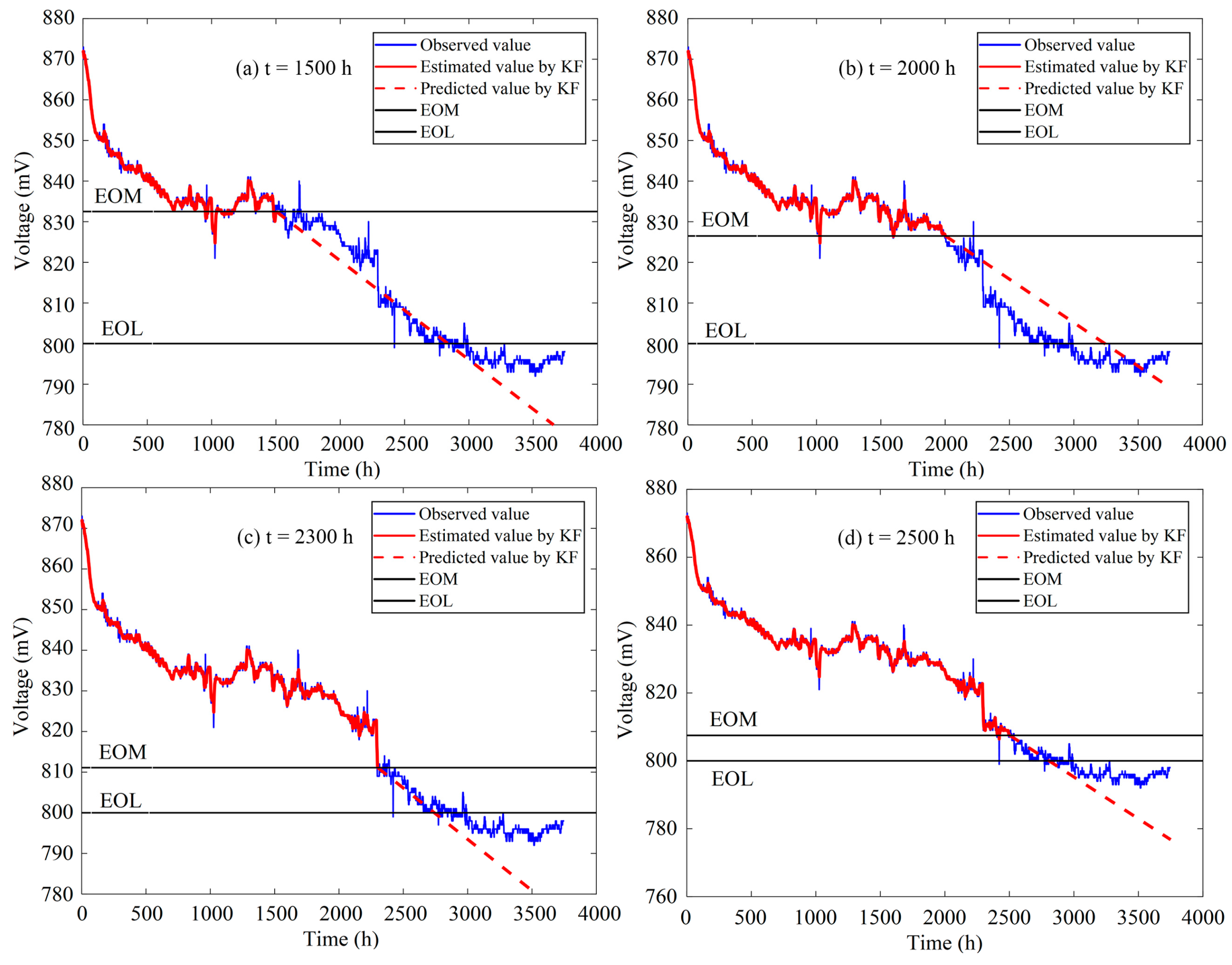
3.1.3. Estimation Results from the Kalman Filter
3.2. The Data-Driven RUL Prediction Method
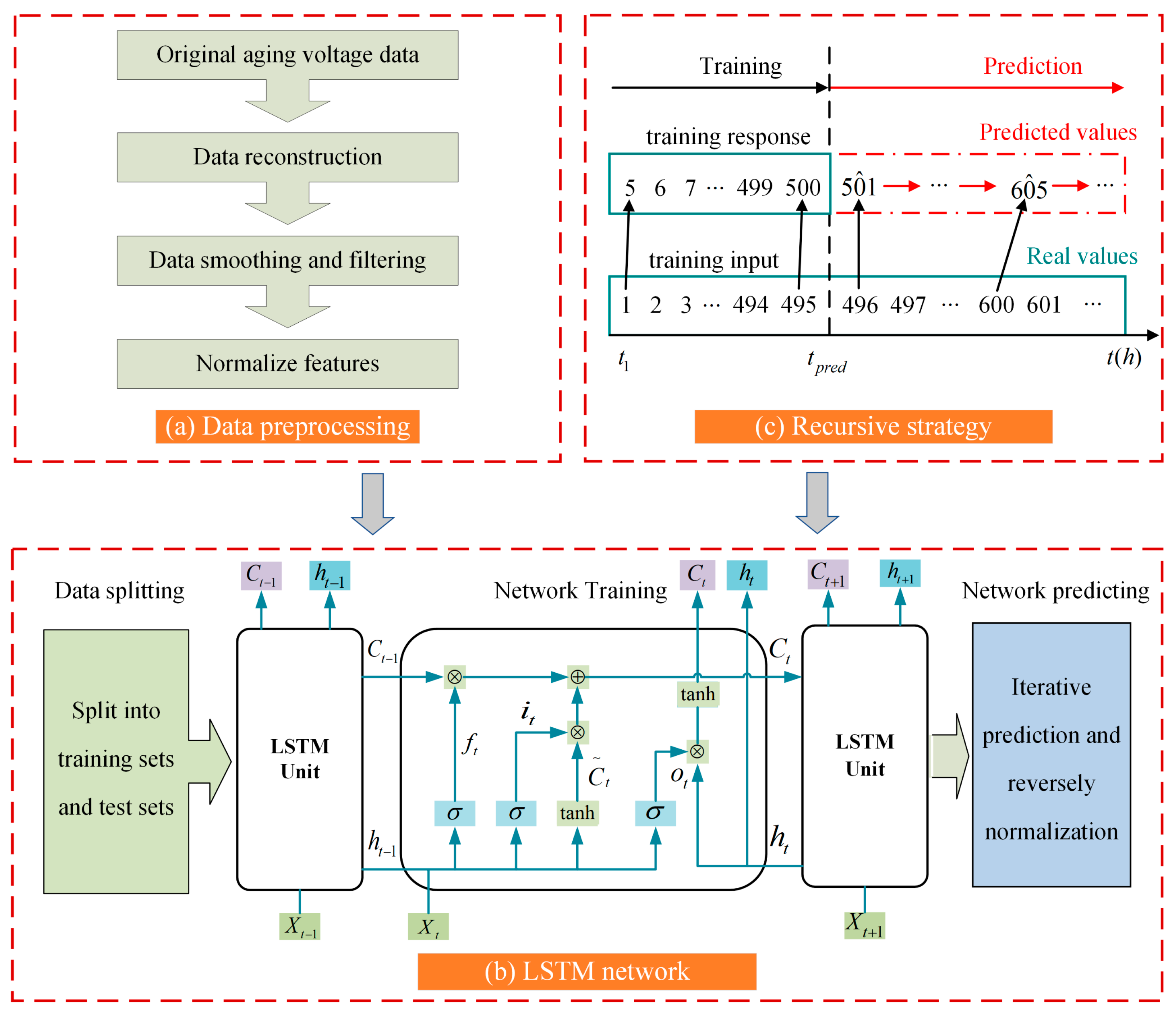
3.2.1. LSTM Network Model
3.2.2. Prognostics Implementation with the LSTM-Recursive Method
- (1)
- Data standardization.
- (2)
- Data splitting. The voltage data was split into training sets and test sets.
- (3)
- Prepare training input and response. The response was designated as a new sequence formed by moving the values of the training sequence by four steps. In other words, at each time step of the input sequence, the LSTM network learns to predict the value of the following fourth-time step. Naturally, you can also move more steps to forecast the voltage situation at a further moment in the future.
- (4)
- Define the LSTM network structure and parameters. The specific values are given below.
- (5)
- Training the network. The “trainNetwork” library in MATLAB (MathWorks, R2021b) software trains the network using the training input and response.
- (6)
- LSTM prediction. Use the “resetState” function to reset the network state so that the predictions of the new data sets are not affected by the previous predictions. Then initialize the network state by predicting the training data. Further, use the “predictAndUpdateState” function to update the network status. The test data is used as the function’s input for each prediction, and the predicted stack voltage is the output. This process is iterative until the end of the test set traversal.
4. Results and Analyses
4.1. Performance Evaluation Criteria
4.2. RUL Prediction
4.3. Analysis and Comparison of RUL Prediction Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, B.; Wang, J.; Zhang, M.; Shu, H.; Yu, T.; Zhang, X.; Yao, W.; Sun, L. A state-of-the-art survey of solid oxide fuel cell parameter identification: Modelling, methodology, and perspectives. Energy Convers. Manag. 2020, 213, 112856. [Google Scholar] [CrossRef]
- Xu, H.; Ma, J.; Tan, P.; Chen, B.; Wu, Z.; Zhang, Y.; Wang, H.; Xuan, J.; Ni, M. Towards online optimisation of solid oxide fuel cell performance: Combining deep learning with multi-physics simulation. Energy AI 2020, 1, 100003. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, L.; Struchtrup, H.; Li, J.; Gan, Q.; Xu, X.; Hu, Z.; Ouyang, M. Modeling of Fuel Cell Cold Start and Dimension Reduction Simplification Method. J. Electrochem. Soc. 2020, 167, 044501. [Google Scholar] [CrossRef]
- Zheng, Y.; Wu, X.-l.; Zhao, D.; Xu, Y.-w.; Wang, B.; Zu, Y.; Li, D.; Jiang, J.; Jiang, C.; Fu, X.; et al. Data-driven fault diagnosis method for the safe and stable operation of solid oxide fuel cells system. J. Power Sources 2021, 490, 229561. [Google Scholar] [CrossRef]
- Cuneo, A.; Zaccaria, V.; Tucker, D.; Traverso, A. Probabilistic analysis of a fuel cell degradation model for solid oxide fuel cell and gas turbine hybrid systems. Energy 2017, 141, 2277–2287. [Google Scholar] [CrossRef]
- Zeng, Z.; Qian, Y.; Zhang, Y.; Hao, C.; Dan, D.; Zhuge, W. A review of heat transfer and thermal management methods for temperature gradient reduction in solid oxide fuel cell (SOFC) stacks. Appl. Energy 2020, 280, 115899. [Google Scholar] [CrossRef]
- Peng, J.; Huang, J.; Wu, X.-L.; Xu, Y.-W.; Chen, H.; Li, X. Solid oxide fuel cell (SOFC) performance evaluation, fault diagnosis and health control: A review. J. Power Sources 2021, 505, 230058. [Google Scholar] [CrossRef]
- Wu, X.; Ye, Q.; Wang, J. A hybrid prognostic model applied to SOFC prognostics. Int. J. Hydrogen Energy 2017, 42, 25008–25020. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.-X.; He, H.; Sun, F. A short- and long-term prognostic associating with remaining useful life estimation for proton exchange membrane fuel cell. Appl. Energy 2021, 304, 117841. [Google Scholar] [CrossRef]
- Rao, M.; Wang, L.; Chen, C.; Xiong, K.; Li, M.; Chen, Z.; Dong, J.; Xu, J.; Li, X. Data-Driven State Prediction and Analysis of SOFC System Based on Deep Learning Method. Energies 2022, 15, 3099. [Google Scholar] [CrossRef]
- Ge, M.-F.; Liu, Y.; Jiang, X.; Liu, J. A review on state of health estimations and remaining useful life prognostics of lithium-ion batteries. Measurement 2021, 174, 109057. [Google Scholar] [CrossRef]
- Liu, X.; Liu, L.; Liu, D.; Wang, L.; Guo, Q.; Peng, X. A Hybrid Method of Remaining Useful Life Prediction for Aircraft Auxiliary Power Unit. IEEE Sens. J. 2020, 20, 7848–7858. [Google Scholar] [CrossRef]
- Xie, R.; Ma, R.; Pu, S.; Xu, L.; Zhao, D.; Huangfu, Y. Prognostic for fuel cell based on particle filter and recurrent neural network fusion structure. Energy AI 2020, 2, 100017. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, S.; Zhao, H.; Wang, Y. Durability estimation and short-term voltage degradation forecasting of vehicle PEMFC system: Development and evaluation of machine learning models. Appl. Energy 2022, 326, 119975. [Google Scholar] [CrossRef]
- Ma, G.; Wang, Z.; Liu, W.; Fang, J.; Zhang, Y.; Ding, H.; Yuan, Y. A two-stage integrated method for early prediction of remaining useful life of lithium-ion batteries. Knowl.-Based Syst. 2023, 259, 110012. [Google Scholar] [CrossRef]
- Lyu, C.; Lai, Q.; Ge, T.; Yu, H.; Wang, L.; Ma, N. A lead-acid battery’s remaining useful life prediction by using electrochemical model in the Particle Filtering framework. Energy 2017, 120, 975–984. [Google Scholar] [CrossRef]
- Gallo, M.; Polverino, P.; Mougin, J.; Morel, B.; Pianese, C. Coupling electrochemical impedance spectroscopy and model-based aging estimation for solid oxide fuel cell stacks lifetime prediction. Appl. Energy 2020, 279, 115718. [Google Scholar] [CrossRef]
- Khan, S.; Rizvi, S.A.; Urooj, S. Equivalent circuit modelling using electrochemical impedance spectroscopy for different materials of SOFC. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 1563–1567. [Google Scholar]
- Chang, Y.; Fang, H.; Zhang, Y. A new hybrid method for the prediction of the remaining useful life of a lithium-ion battery. Appl. Energy 2017, 206, 1564–1578. [Google Scholar] [CrossRef]
- Chen, K.; Laghrouche, S.; Djerdir, A. Fuel cell health prognosis using Unscented Kalman Filter: Postal fuel cell electric vehicles case study. Int. J. Hydrogen Energy 2019, 44, 1930–1939. [Google Scholar] [CrossRef]
- Dolenc, B.; Boškoski, P.; Stepančič, M.; Pohjoranta, A.; Juričić, Đ. State of health estimation and remaining useful life prediction of solid oxide fuel cell stack. Energy Convers. Manag. 2017, 148, 993–1002. [Google Scholar] [CrossRef]
- Dolenc, B.; Boškoski, P.; Pohjoranta, A.; Noponen, M.; Juričić, Đ. Hybrid approach to remaining useful life prediction of solid oxide fuel cell stack. ECS Trans. 2017, 78, 2251. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Q.; Shao, S.; Niu, T.; Yang, X. Attention-Based LSTM Network for Rotatory Machine Remaining Useful Life Prediction. IEEE Access 2020, 8, 132188–132199. [Google Scholar] [CrossRef]
- Xue, Z.; Zhang, Y.; Cheng, C.; Ma, G. Remaining useful life prediction of lithium-ion batteries with adaptive unscented kalman filter and optimized support vector regression. Neurocomputing 2020, 376, 95–102. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Javed, K.; Gouriveau, R.; Zerhouni, N.; Hissel, D. Data-driven Prognostics of Proton Exchange Membrane Fuel Cell Stack with constraint based Summation-Wavelet Extreme Learning Machine. In Proceedings of the International Conference on Fundamentals and Development of Fuel Cells, Toulouse, France, 3–5 February 2015. [Google Scholar]
- Zhao, Q.; Qin, X.; Zhao, H.; Feng, W. A novel prediction method based on the support vector regression for the remaining useful life of lithium-ion batteries. Microelectron. Reliab. 2018, 85, 99–108. [Google Scholar] [CrossRef]
- Song, S.; Xiong, X.; Wu, X.; Xue, Z. Modeling the SOFC by BP neural network algorithm. Int. J. Hydrogen Energy 2021, 46, 20065–20077. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Xin, Y.; Hu, Y. Prediction of Remaining Useful Life of Proton Exchange Membrane Fuel Cell based on Wavelet-LSTM. In Proceedings of the 2020 IEEE 9th Data Driven Control and Learning Systems Conference (DDCLS), Liuzhou, China, 20–22 November 2020; pp. 1009–1014. [Google Scholar]
- Zhang, Y.; Xiong, R.; He, H.; Pecht, M.G. Long Short-Term Memory Recurrent Neural Network for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 5695–5705. [Google Scholar] [CrossRef]
- Huang, C.-G.; Huang, H.-Z.; Li, Y.-F. A Bidirectional LSTM Prognostics Method Under Multiple Operational Conditions. IEEE Trans. Ind. Electron. 2019, 66, 8792–8802. [Google Scholar] [CrossRef]
- Liu, J.; Li, Q.; Chen, W.; Yan, Y.; Qiu, Y.; Cao, T. Remaining useful life prediction of PEMFC based on long short-term memory recurrent neural networks. Int. J. Hydrogen Energy 2019, 44, 5470–5480. [Google Scholar] [CrossRef]
- Wu, X.; Ye, Q. Fault diagnosis and prognostic of solid oxide fuel cells. J. Power Sources 2016, 321, 47–56. [Google Scholar] [CrossRef]
- Yan, D.; Zhang, C.; Liang, L.; Li, K.; Jia, L.; Pu, J.; Jian, L.; Li, X.; Zhang, T. Degradation analysis and durability improvement for SOFC 1-cell stack. Appl. Energy 2016, 175, 414–420. [Google Scholar] [CrossRef]
- Luo, J.; Yan, D.; Fang, D.; Liang, F.; Pu, J.; Chi, B.; Zhu, Z.H.; Li, J. Electrochemical performance and thermal cyclicability of industrial-sized anode supported planar solid oxide fuel cells. J. Power Sources 2013, 224, 37–41. [Google Scholar] [CrossRef]
- Gemmen, R.S.; Williams, M.C.; Gerdes, K. Degradation measurement and analysis for cells and stacks. J. Power Sources 2008, 184, 251–259. [Google Scholar] [CrossRef]
- Zhang, L. Optimization and Control Strategy of SOFC from the Perspective of High Efficiency. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2015. [Google Scholar]
- Yamamoto, Y. The influence of R. E. Kalman—State space theory, realization, and sampled-data systems. Annu. Rev. Control 2019, 47, 1–6. [Google Scholar] [CrossRef]
- Bressel, M.; Hilairet, M.; Hissel, D.; Ould Bouamama, B. Extended Kalman Filter for prognostic of Proton Exchange Membrane Fuel Cell. Appl. Energy 2016, 164, 220–227. [Google Scholar] [CrossRef]
- Mo, B.; Yu, J.; Tang, D.; Liu, H. A remaining useful life prediction approach for lithium-ion batteries using Kalman filter and an improved particle filter. In Proceedings of the 2016 IEEE international conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–5. [Google Scholar]
- Zhang, D.; Cadet, C.; Yousfi-Steiner, N.; Bérenguer, C. Proton exchange membrane fuel cell remaining useful life prognostics considering degradation recovery phenomena. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2018, 232, 415–424. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Related to fuel cell | |||
| Thickness of YSZ electrolyte | 10 μm | Thickness of anode functional layer | 10 μm |
| Thickness of anode support | 1 mm | Thickness of YSZ-based cathode | ≤3 μm |
| Related to operating conditions | |||
| Stack temperature | 750 °C | Air flow rate | 2 NL/min |
| Hydrogen flow rate | 2 NL/min | Load current | 0.37 A/cm2 (30 A) |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| kE | 2.304 × 10−4 | T0 | 298.15 K |
| R* | 8.314 J·mol·K−1 | F | 96,485 C·mol−1 |
| iL | 1 × 104 A·m−2 | ne | 2 |
| I0,a | 5300 A·m−2 | io,c | 2000 A·m−2 |
| a0 | −25.855 | a1 | 7509.6 |
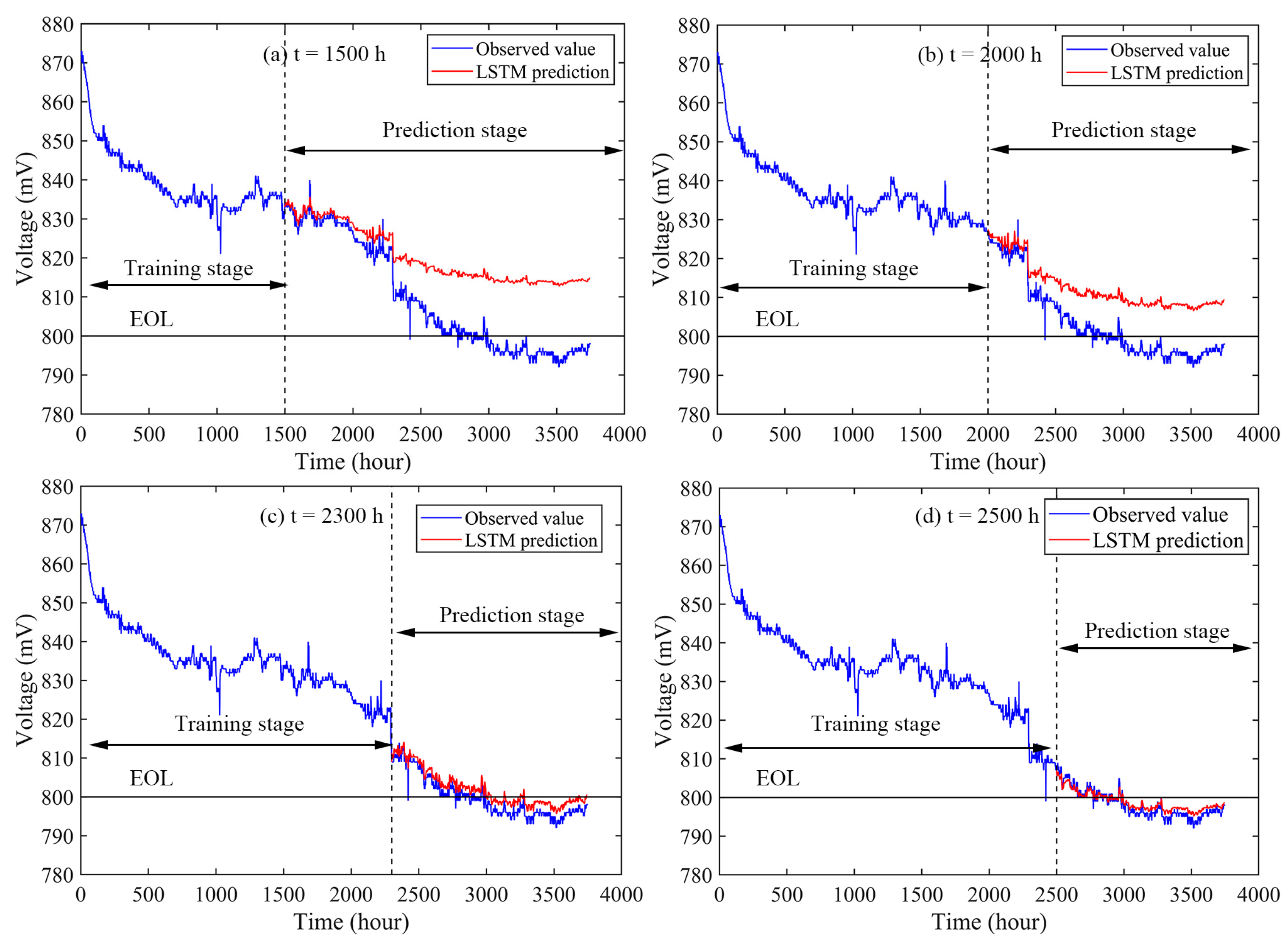
| Method | Forecast Starting Point/h | RULreal/h | RULpre/h | RMSE | MAE |
|---|---|---|---|---|---|
| KF | 1500 | 1271 | 1337 | 4.2324 | 0.0042 |
| 2000 | 771 | 1241 | 7.3568 | 0.0078 | |
| 2300 | 471 | 441 | 1.7692 | 0.0018 | |
| 2500 | 271 | 307 | 1.7582 | 0.0018 | |
| LSTM | 1500 | 1271 | / | 7.8885 | 0.0074 |
| 2000 | 771 | / | 6.4721 | 0.0069 | |
| 2300 | 471 | 698 | 2.1802 | 0.0022 | |
| 2500 | 271 | 287 | 1.4373 | 0.0015 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, C.; Zheng, Y.; Tian, R.; Xiang, Q.; Deng, Z.; Fu, X.; Li, X. A Comparative Study of the Kalman Filter and the LSTM Network for the Remaining Useful Life Prediction of SOFC. Energies 2023, 16, 3628. https://doi.org/10.3390/en16093628
Sheng C, Zheng Y, Tian R, Xiang Q, Deng Z, Fu X, Li X. A Comparative Study of the Kalman Filter and the LSTM Network for the Remaining Useful Life Prediction of SOFC. Energies. 2023; 16(9):3628. https://doi.org/10.3390/en16093628
Chicago/Turabian StyleSheng, Chuang, Yi Zheng, Rui Tian, Qian Xiang, Zhonghua Deng, Xiaowei Fu, and Xi Li. 2023. "A Comparative Study of the Kalman Filter and the LSTM Network for the Remaining Useful Life Prediction of SOFC" Energies 16, no. 9: 3628. https://doi.org/10.3390/en16093628