
Virtual Development of Advanced Thermal Management Functions Using Model-in-the-Loop Applications
 , ,
, ,
Abstract
:1. Introduction
- Development of a methodology for designing thermal management features early in the product life cycle.
- Setup of advanced thermal management models that reflect the real system to enable high accuracy with low calibration effort and real-time capability.
- Demonstration of control unit function development for electric actuators in an internal combustion engine cooling system. Here, intelligent functions enable highest efficiency and thermal safety under all driving conditions. In addition, the influence of model predictive control on efficiency is analyzed.
- Demonstration of the development of on-board diagnostic functions for failure mode detection in a cooling system of an ICE.
- Demonstration of the methodology transferability for a battery cooling system in a challenging kickdown driving scenario.
2. Methodology of Control Unit Function Development
3. Vehicle Specifications
- 12 V electric water pump (450 W)
- Electric actuated thermal management module
- 12 V electric fan (600 W)
- Coolant temperature sensors T1, T2 and T3
4. Model Setup
4.1. Vehicle Model Setup
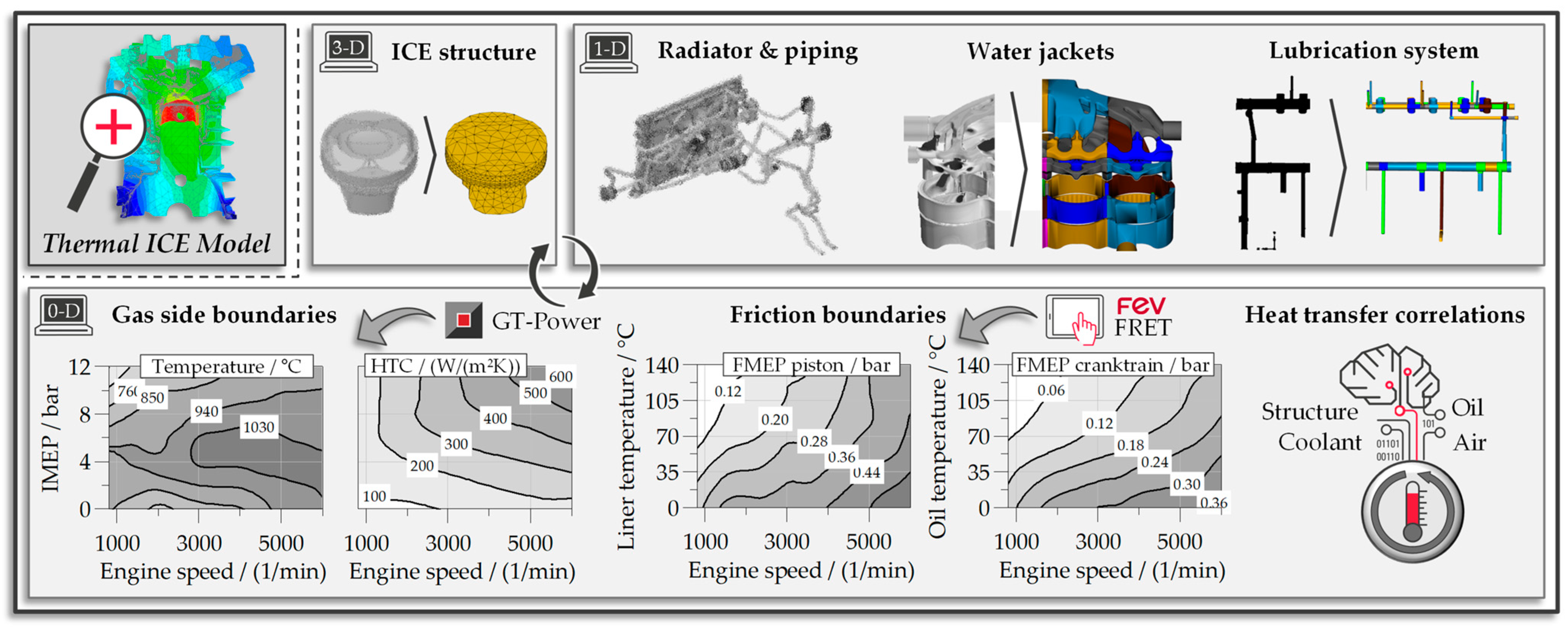
4.2. Advanced Thermal Management Model Setup
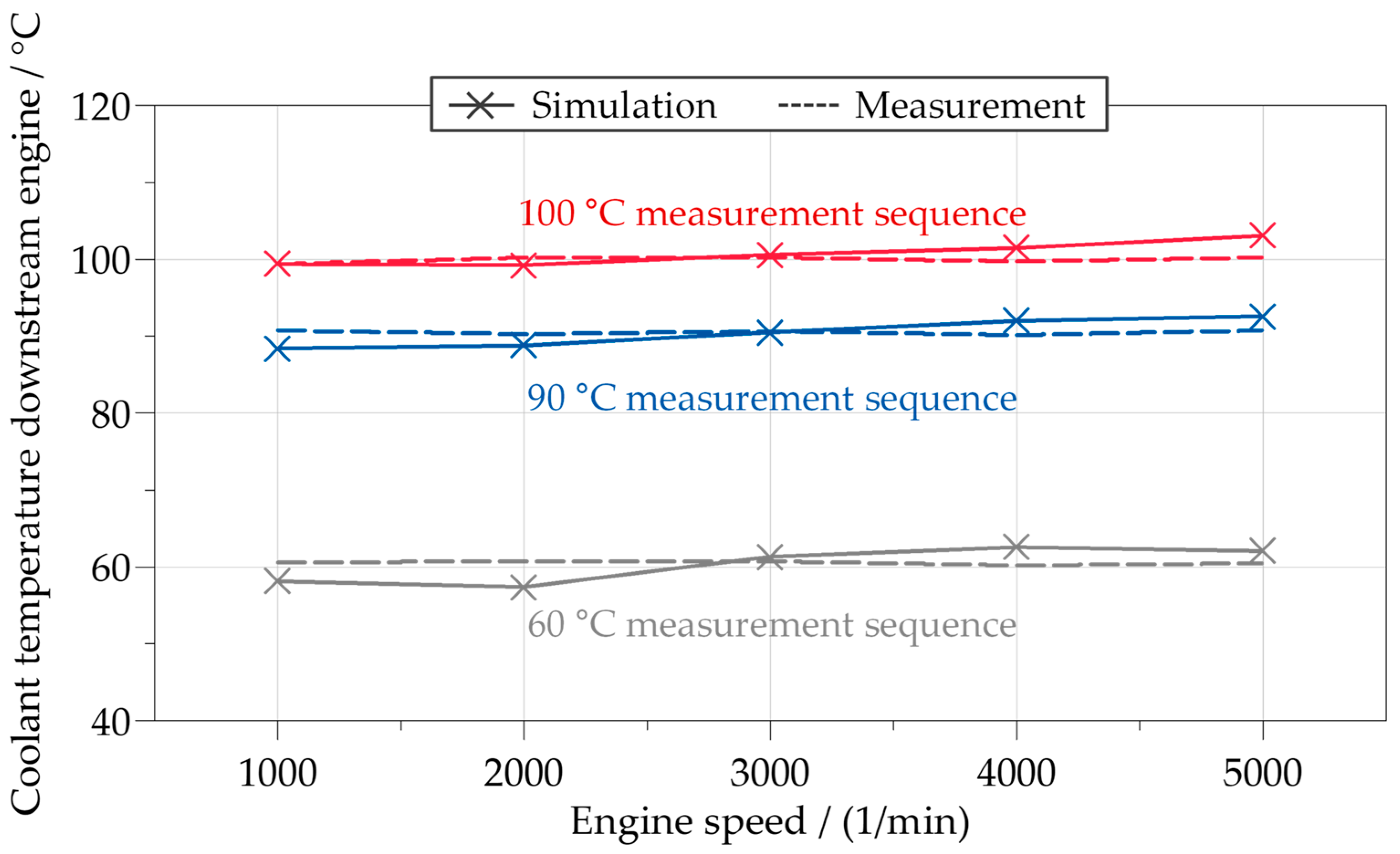
Thermal Management Model Validation
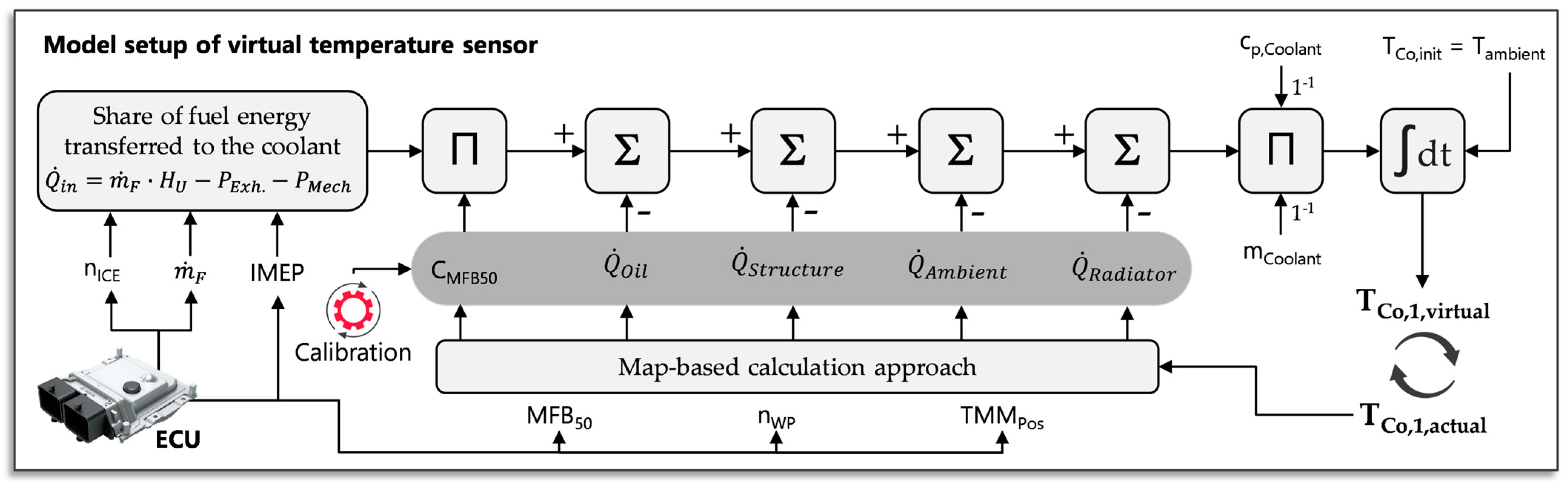
4.3. Reduced Order Model for Control Unit
5. Rule-Based Control Strategies Predesign within Advanced Thermal Management Model
5.1. Control Strategy Predesign within Advanced Thermal Management Model
5.2. MiL Control Unit Function Design and Calibration
5.3. Thermal System Protection
6. Enhancement by Model Predictive Control Strategies
7. Generic Application of the Development Methodology
7.1. On-Board Diagnostics Failure Mode Detection
7.2. Function Development for Electric Powertrain Components
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ATMM | Advanced Thermal Management Model |
| Byp | Bypass |
| CFD | Computational Fluid Dynamics |
| CHT | Conjugate Heat Transfer |
| CO2 | Carbon dioxide |
| Specific heat | |
| DHE | Dedicated Hybrid Engine |
| DoE | Design of Experiments |
| ECU | Electronic Control Unit |
| EM | E-Motor |
| EU | European Union |
| EU7 | Euro 7 emission legislation |
| eWP | Electric water pump |
| FEM | Finite Element Method |
| HiL | Hardware-in-the-Loop |
| HV | High Voltage |
| HVAC | Heating, Ventilation and Air Conditioning |
| ICE | Internal Combustion Engine |
| Max. | Maximum |
| Coolant mass flow rate | |
| MFB50 | Location of 50% mass fraction burnt |
| MiL | Model-in-the-Loop |
| Min. | Minimum |
| neWP | Electric water pump speed |
| nICE | Engine speed |
| NVH | Noise-Vibration-Harshness |
| OBD | On-Board Diagnostics |
| PID | Proportional-Integral-Derivative controller |
| pmi | Engine mean indicated pressure |
| posTMM | Position of thermal management module |
| Heat transfer rate | |
| Rad | Radiator |
| ROM | Reduced Order Model |
| SiL | Software-in-the-Loop |
| SOP | Start of Production |
| SUV | Sport Utility Vehicle |
| TCo | Coolant temperature |
| TMM | Thermal Management Module |
| TOil | Oil temperature |
| TStruc | Engine structure temperature |
| TOil | Radiator |
| Tx,n | Temperature of current timestep |
| Tx,n-1 | Temperature of last timestep |
| WLTC | Worldwide harmonized Light vehicles Test Cycle |
| Volumetric flow rate for cylinder head water jacket | |
| Volumetric flow rate for cylinder block water jacket | |
| Volumetric flow rate for oil cooler | |
| Volumetric flow rate for radiator | |
| Volumetric flow rate for bypass | |
| Heat flux correction factor |
Appendix A



References
- Europäische Kommission. Mitteilung der Kommission an das Europäische Parlament, den Europäischen Rat, den Rat, den Europäischen Wirtschafts- und Sozialausschuss und den Ausschuss der Regionen—Der Europäische Grüne Deal. 2019. Available online: https://eur-lex.europa.eu/resource.html?uri=cellar:b828d165-1c22-11ea-8c1f-01aa75ed71a1.0021.02/DOC_1&format=PDF (accessed on 6 February 2023).
- Vereinte Nationen—Weltklimakonferenz. Übereinkommen von Paris; Vereinte Nationen—Weltklimakonferenz: Paris, France, 2015; Available online: https://www.bmuv.de/fileadmin/Daten_BMU/Download_PDF/Klimaschutz/paris_abkommen_bf.pdf (accessed on 6 February 2023).
- Uhlmann, T.; Balazs, A.; Maurer, R. Hybrid-BEV—Ein-Plattform-Lösung für zukünftige PKW. In Proceedings of the 30th Aachen Colloquium Sustainable Mobility, Aachen, Germany, 4–6 October 2021; Aachener Kolloquium Fahrzeug-und Motorentechnik GbR: Aachen, Germany, 2021. [Google Scholar]
- Uhlmann, T.; Balazs, A.; Lückmann, D.; Müller, A.; Thewes, M.; Sahr, C.; Pischinger, J.; Hellenbroich, G.; Herold, K.L.; Lüdiger, T.; et al. High Efficient Gasoline HEV Meeting 2030 CO2 Targets—The Road towards 59 g/km Fleet CO2. In Proceedings of the 29th Aachen Colloquium Sustainable Mobility, Aachen, Germany, 5–7 October 2020; Aachener Kolloquium Fahrzeug-und Motorentechnik GbR: Aachen, Germany, 2020. ISBN 978-3-00-064871-7. [Google Scholar]
- Nationale Plattform Zukunft der Mobilität—Arbeitsgruppe 2. Alternative Antriebe und Kraftstoffe für Nachhaltige Mobilität. Kundenakzeptanz als Schlüssel für den Markthochlauf der Elektromobilität: Ein Forschungsvorhaben der AG 2: Alternative Antriebe und Kraftstoffe für Nachhaltige Mobilität; Nationale Plattform Zukunft der Mobilität: Berlin, Germany, 2021; Available online: https://www.plattform-zukunft-mobilitaet.de/wp-content/uploads/2021/10/NPM_AG2_Kundenakzeptanz.pdf (accessed on 22 March 2023).
- Carvalho, H.; Naghshineh, B.; Govindan, K.; Cruz-Machado, V. The resilience of on-time delivery to capacity and material shortages: An empirical investigation in the automotive supply chain. Comput. Ind. Eng. 2022, 171, 108375. [Google Scholar] [CrossRef]
- Eldem, B.; Kluczek, A.; Bagiński, J. The COVID-19 Impact on Supply Chain Operations of Automotive Industry: A Case Study of Sustainability 4.0 Based on Sense–Adapt–Transform Framework. Sustainability 2022, 14, 5855. [Google Scholar] [CrossRef]
- Europäische Kommission. Vorschlag für eine Verordnung des Europäischen Parlaments und des Rates über die Typgenehmigung von Kraftfahrzeugen und Motoren Sowie von Systemen, Bauteilen und Selbstständigen Technischen Einheiten für Diese Fahrzeuge Hinsichtlich Ihrer Emissionen und der Dauerhaltbarkeit von Batterien (Euro 7) und zur Aufhebung der Verordnungen (EG) Nr. 715/2007 und (EG) Nr. 595/2009, 2022 (2022/0365 (COD)). 2022. Available online: https://ec.europa.eu/info/law/better-regulation/have-your-say/initiatives/12313-Europaische-Normen-fur-Fahrzeugemissionen-Euro-7-fur-Pkw-leichte-Nutzfahrzeuge-Lastkraftwagen-und-Busse_de (accessed on 6 February 2023).
- Europäische Kommission. Anhänge zum Vorschlag für eine Verordnung des Europäischen Parlaments und des Rates über die Typgenehmigung von Kraftfahrzeugen und Motoren sowie von Systemen, Bauteilen und selbstständigen Technischen Einheiten für diese Fahrzeuge Hinsichtlich Ihrer Emissionen und der Dauerhaltbarkeit von Batterien (Euro 7) und zur Aufhebung der Verordnungen (EG) Nr. 715/2007 und (EG) Nr. 595/2009, 2022 (COM(2022) 586 Final). 2022. Available online: https://ec.europa.eu/info/law/better-regulation/have-your-say/initiatives/12313-Europaische-Normen-fur-Fahrzeugemissionen-Euro-7-fur-Pkw-leichte-Nutzfahrzeuge-Lastkraftwagen-und-Busse_de (accessed on 6 February 2023).
- Ao, G.-Q.; Qiang, J.-X.; Zhong, H.; Mao, X.-J.; Yang, L.; Zhuo, B. Fuel economy and NO x emission potential investigation and trade-off of a hybrid electric vehicle based on dynamic programming. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2008, 222, 1851–1864. [Google Scholar] [CrossRef]
- Back, M. Prädiktive Antriebsregelung zum energieoptimalen Betrieb von Hybridfahrzeugen; Univ.-Verl. Karlsruhe: Karlsruhe, Germany, 2006; ISBN 9783866440319. [Google Scholar]
- Chen, Z.; Mi, C.C. An adaptive online energy management controller for power-split HEV based on Dynamic Programming and fuzzy logic. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference (VPPC), Dearborn, MI, USA, 7–10 September; IEEE: Piscataway, NY, USA, 2009; pp. 335–339, ISBN 978-1-4244-2600-3. [Google Scholar]
- Dextreit, C.; Assadian, F.; Kolmanovsky, I.V.; Mahtani, J.; Burnham, K. Hybrid Electric Vehicle Energy Management Using Game Theory. In SAE Technical Paper Series, Proceedings of the SAE World Congress & Exhibition, Detroit, MI, USA, 14–17 April 2008; SAE International 400 Commonwealth Drive: Warrendale, PA, USA, 2008. [Google Scholar]
- Jeon, S.; Jo, S.; Park, Y.; Lee, J. Multi-Mode Driving Control of a Parallel Hybrid Electric Vehicle Using Driving Pattern Recognition. J. Dyn. Syst. Meas. Control. 2002, 124, 141–149. [Google Scholar] [CrossRef]
- Müller, J.; Maurer, R.; Achenbach, J.; Balazs, A.; Knauf, J. Antriebsstrangoptimierung von Hybridsystemen unter Berücksichtigung thermischer Einzelkomponentenwirkungsgrade. In Experten-Forum Powertrain: Reibung in Antrieb und Fahrzeug 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 179–201. [Google Scholar]
- Merker, G.P. Grundlagen Verbrennungsmotoren: Funktionsweise und Alternative Antriebssysteme Verbrennung, Messtechnik und Simulation, 9th ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2019; ISBN 9783658235574. [Google Scholar]
- Pischinger, S.; Seiffert, U. Vieweg Handbuch Kraftfahrzeugtechnik; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2021; ISBN 978-3-658-25556-5. [Google Scholar]
- Andert, J.; Xia, F.; Klein, S.; Savelsberg, R.; Guse, D.; Tharmakulasingam, R.; Thewes, M.; Scharf, J. Road-to-Rig-to-Desktop—Virtual Development Using Real-Time Engine Modeling and Powertrain-Co-Simulation. COMODIA 2017, 2017.9, A108. [Google Scholar] [CrossRef]
- Gottorf, S.; Fryjan, J.; Leyens, L.; Picerno, M.; Habermann, K.; Pischinger, S. Lean Approach for Virtual Calibration Using Hardware-in-the-Loop and Electronic Control Unit (ECU)-Capable Engine Simulation. SAE Int. J. Engines 2021, 14. [Google Scholar] [CrossRef]
- Schäfer, S. Modellbasierte Steuerung des Kühlkreislaufes einer Brennstoffzelle mit automatisiertem Test der Software. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2012. [Google Scholar]
- Platner, S.; Kordon, M.; Fakiolas, E.; Atzler, H. Modellbasierte Serien-kalibrierung—Der effiziente Weg für Variantenentwicklung. MTZ Motortech Z 2013, 74, 754–761. [Google Scholar] [CrossRef]
- Eichlseder, W.; Hager, J.; Raup, M.; Dietz, S. Auslegung von Kühlsystemen mittels Simulationsrechnung. Automob. Z. 1997, 99, 638–647. [Google Scholar]
- VDI/VDE. Entwicklung Mechatronischer und Cyber-Physischer Systeme; VDI/VDE: Berlin, Germany, 2021; Available online: https://www.vdi.de/richtlinien/details/vdivde-2206-entwicklung-mechatronischer-und-cyber-physischer-systeme (accessed on 3 February 2023).
- Banjac, T.; Wurzenberger, J.C.; Katrašnik, T. Assessment of engine thermal management through advanced system engineering modeling. Adv. Eng. Softw. 2014, 71, 19–33. [Google Scholar] [CrossRef]
- Lu, L.; Chen, H.; Hu, Y.; Gong, X.; Zhao, Z. Modeling and Optimization Control for an Engine Electrified Cooling System to Minimize Fuel Consumption. IEEE Access 2019, 7, 72914–72927. [Google Scholar] [CrossRef]
- Setlur, P.; Wagner, J.R.; Dawson, D.M.; Marotta, E. An Advanced Engine Thermal Management System: Nonlinear Control and Test. IEEE/ASME Trans. Mechatron. 2005, 10, 210–220. [Google Scholar] [CrossRef]
- Kang, H.; Ahn, H.; Min, K. Smart cooling system of the double loop coolant structure with engine thermal management modeling. Appl. Therm. Eng. 2015, 79, 124–131. [Google Scholar] [CrossRef]
- Wilson, S.; Yoon, H.-S.; Sun, Y.; Lee, J.H.; Ha, J.; Lee, E. A Comparative Study on Engine Thermal Management System. In Electronic Control Module Network and Data Link Development and Validation Using Hardware in the Loop Systems; SAE Technical Paper Series; 2020/04/14; Williams, D., Allen, J., Hukkeri, R., Eds.; SAE International: Warrendale, PA, USA, 2009; ISBN 0148-7191. [Google Scholar]
- Luptowski, B.J.; Arici, O.; Johnson, J.H.; Parker, G.G. Development of the Enhanced Vehicle and Engine Cooling System Simulation and Application to Active Cooling Control; SAE Technical Paper; 2005-01-0697; SAE International: Warrendale, PA, USA, 2005; Available online: https://www.sae.org/publications/technical-papers/content/2005-01-0697/ (accessed on 15 February 2023).
- Shujiang, L.; Chaoying, S.; Xiangdong, W.; Lixin, K. Based on intelligent controller design of automotive engine cooling in AVR microcontroller. In Proceedings of the 2011 IEEE International Conference on Automation and Logistics (ICAL), Chongqing, China, 15–16 August 2011; pp. 254–260, ISBN 2161-816X. [Google Scholar]
- Sanna, A.; Hutter, C.; Kenning, D.; Karayiannis, T.G.; Sefiane, K.; Nelson, R.A. Numerical investigation of nucleate boiling heat transfer on thin substrates. Int. J. Heat Mass Transf. 2014, 76, 45–64. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Wen, M.; Yang, H.; Yue, Z.; Yao, M. A Review of Thermal Management System and Control Strategy for Automotive Engines. J. Energy Eng. 2021, 147. [Google Scholar] [CrossRef]
- Chen, Y.-M.; Lee, J.; Holmer, J.; Ha, J. Model Predictive Control for Engine Thermal Management System. In SAE Technical Paper Series, Proceedings of the SAE WCX Digital Summit, 12–15 April 2021; SAE International 400 Commonwealth Drive: Warrendale, PA, USA, 2021. [Google Scholar]
- Castiglione, T.; Pizzonia, F.; Bova, S. A Novel Cooling System Control Strategy for Internal Combustion Engines. SAE Int. J. Mater. Manf. 2016, 9, 294–302. [Google Scholar] [CrossRef]
- Zhou, B.; Lan, X.; Xu, X.; Liang, X. Numerical model and control strategies for the advanced thermal management system of diesel engine. Appl. Therm. Eng. 2015, 82, 368–379. [Google Scholar] [CrossRef]
- Bova, S.; Castiglione, T.; Piccione, R.; Pizzonia, F.; Belli, M. Experimental Investigation and Lumped-parameter Model of the Cooling System of an ICE under Nucleate Boiling Conditions. Energy Procedia 2015, 81, 907–917. [Google Scholar] [CrossRef] [Green Version]
- Caresana, F.; Bilancia, M.; Bartolini, C.M. Numerical method for assessing the potential of smart engine thermal management: Application to a medium-upper segment passenger car. Appl. Therm. Eng. 2011, 31, 3559–3568. [Google Scholar] [CrossRef] [Green Version]
- Margot, X.; Quintero, P.; Gomez-Soriano, J.; Escalona, J. Implementation of 1D–3D integrated model for thermal prediction in internal combustion engines. Appl. Therm. Eng. 2021, 194, 117034. [Google Scholar] [CrossRef]
- Broatch, A.; Margot, X.; Garcia-Tiscar, J.; Escalona, J. Validation and Analysis of Heat Losses Prediction Using Conjugate Heat Transfer Simulation for an Internal Combustion Engine. In SAE Technical Paper Series, Proceedings of the 14th International Conference on Engines & Vehicles, Napoli, Italy, 15–19 September 2019; SAE International 400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Mao, S.; Feng, Z.; Michaelides, E.E. Off-highway heavy-duty truck under-hood thermal analysis. Appl. Therm. Eng. 2010, 30, 1726–1733. [Google Scholar] [CrossRef]
- Bayraktar, I. Computational simulation methods for vehicle thermal management. Appl. Therm. Eng. 2012, 36, 325–329. [Google Scholar] [CrossRef]
- Millo, F.; Caputo, S.; Cubito, C.; Calamiello, A.; Mercuri, D.; Rimondi, M. Numerical Simulation of the Warm-Up of a Passenger Car Diesel Engine Equipped with an Advanced Cooling System. In SAE Technical Paper Series, Proceedings of the SAE 2016 World Congress and Exhibition, Detroit, MI, USA, 12–14 April 2016; SAE International 400 Commonwealth Drive: Warrendale, PA, USA, 2016. [Google Scholar]
- Mercedes-Benz SL: Entwicklung und Technik; Ernstberger, U.; Weissinger, J.; Frank, J. (Eds.) Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2013; ISBN 978-3-658-00799-7. [Google Scholar]
- Balazs, A. Optimierte Auslegung von ottomotorischen Hybridantriebssträngen unter realen Fahrbedingungen: Lehrstuhl für Verbrennungskraftmaschinen und Institut für Thermodynamik. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 2015. [Google Scholar]
- Seibel, J.; Pischinger, S. Abschlussbericht zum Vorhaben Untersuchung zur optimierten Auslegung von Ottomotoren in Hybrid-Antriebsträngen; FVV, Heft R537; FVV: Frankfurt, Germany, 2007. [Google Scholar]
- FEV Software and Testing Solutions. Doe Software with Global Map Optimization Gaussian Process Model. Available online: https://www.fev-sts.com/fileadmin/user_upload/STS/Brochure-Catalog_2022/FEV-STS_Brochure_xCAL_2022.pdf (accessed on 5 February 2023).
- Kexel, J.; Müller, J.; Pischinger, S.; Günther, M. Interim Report: Highly-Flexible Internal Combustion Engines for Hybrid Vehicles (HyFlex-ICE): FVV1433, Heft R602; FVV: Frankfurt, Germany, 2022. [Google Scholar]
- Kexel, J.; Müller, J.; Pischinger, S.; Günther, M. Optimal Powertrain Design Process Tailored for Specific Target Customer Requirements. In Proceedings of the E-MOTIVE 14th International Expert Forum: Conference on Electric Vehicle Drives and E-Mobility, Wolfsburg, Germany, 21–22 September 2022. [Google Scholar]
- Klaus, B. Untersuchung des Wärmetransports vom Kolben über die Ringe und die Zylinderbuchse zum Kühlmittel. Ph.D. Thesis, TU München, München, Germany, 1996. [Google Scholar]
- Pflaum, W.; Mollenhauer, K. Wärmeübergang in der Verbrennungskraftmaschine; Springer: Wien, Austria; New York, NY, USA, 1977; ISBN 9783211813874. [Google Scholar]
- Vieler, S. Mirko Plettenberg Bedarfsgerechte Kolbenkühlung F973. In Abschlussbericht Low Friction Powertrain; Forschungsvereinigung Verbrennungskraftmaschinen e.V. (FVV): Frankfurt, Germany, 2013. [Google Scholar]
- Handbuch Verbrennungsmotor: Grundlagen, Komponenten, Systeme, Perspektiven: Grundlagen, Komponenten, Systeme, Perspektiven, 8th ed.; Van Basshuysen, R.; Schäfer, F. (Eds.) Springer Science and Business Media, Springer Vieweg: Wiesbaden, Germany, 2017; ISBN 9783658109028. [Google Scholar]
- Woschni, G. Beitrag zum Problem des Wärmeübergangs im Verbrennungsmotor, 26th ed.; MTZ: Sulzbach, Germany, 1965. [Google Scholar]
- Kehren, C.; Henaux, D.; Hermsen, F.-G.; Ortlieb, P. How to Hybrid—Anwendung des digitalen Reibungsabschätzungstools FRET im Entwicklungs-Frontloading. In Experten-Forum Powertrain: Reibung in Antrieb und Fahrzeug 2020; Liebl, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2021; pp. 61–77. ISBN 978-3-662-63607-7. [Google Scholar]
- Alexander Stalp, A.H. Partikelbildung bei DI-Ottomotoren: Systemische Analyse der Partikelbildung an Ottomotoren; FVV 1223, Heft R596; FVV: Frankfurt, Germany, 2020. [Google Scholar]
- Schyr, C.; Spreitzer, H. Digitaler Streckenatlas für die alpine Antriebsstrangerprobung. Automot. Eng. Partn. 2004, 44–47. [Google Scholar]
- Lopez-Sanz, J.; Ocampo-Martinez, C.; Alvarez-Florez, J.; Moreno-Eguilaz, M.; Ruiz-Mansilla, R.; Kalmus, J.; Graeber, M.; Lux, G. Thermal Management in Plug-In Hybrid Electric Vehicles: A Real-Time Nonlinear Model Predictive Control Implementation. IEEE Trans. Veh. Technol. 2017, 66, 7751–7760. [Google Scholar] [CrossRef] [Green Version]
- Bova, S.; Castiglione, T.; Piccione, R.; Pizzonia, F. A dynamic nucleate-boiling model for CO2 reduction in internal combustion engines. Appl. Energy 2015, 143, 271–282. [Google Scholar] [CrossRef]
- Castiglione, T.; Morrone, P.; Falbo, L.; Perrone, D.; Bova, S. Application of a Model-Based Controller for Improving Internal Combustion Engines Fuel Economy. Energies 2020, 13, 1148. [Google Scholar] [CrossRef] [Green Version]
- Weber, J. Automotive Development Processes; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-642-01252-5. [Google Scholar]
- Cheng, J.; LaCrosse, S.M.; Tascillo, A.L.; Newman, C.E., Jr.; Davis, G.C. Virtual Vehicle Sensors based on Neural Networks Trained Using Data Generated by Simulation Models. U.S. Patent 6236908B1, 8 February 2023. [Google Scholar]
- Prokhorov, D. Virtual Sensors and Their Automotive Applications. In Proceedings of the 2005 International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 5–8 December 2005; IEEE: New York, NY, USA, 2005; pp. 411–416, ISBN 0-7803-9399-6. [Google Scholar]
- Shutty, J.; Bongards, A.; Kondipati, N.; Ristevski, S. Thermomanagement bei elektrifizierten Antriebssystemen. ATZ Automobiltech Z 2022, 124, 38–43. [Google Scholar] [CrossRef]
- Rouaud, C. Innovatives Batteriekühlsystem mittels Immersionskühlung für Mainstream-BEV. In Proceedings of the 30th Aachen Colloquium Sustainable Mobility, Aachen, Germany, 4–6 October 2021; Aachener Kolloquium Fahrzeug-und Motorentechnik GbR: Aachen, Germany, 2021. [Google Scholar]
- Champagne, N. Wie durch den Einsatz einer innovativen Flüssigkeit für das Thermomanagement die Batteriesicherung erhöht werden. In Proceedings of the 30th Aachen Colloquium Sustainable Mobility, Aachen, Germany, 4–6 October 2021; Aachener Kolloquium Fahrzeug-und Motorentechnik GbR: Aachen, Germany, 2021. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Reduction Potential in WLTC, 23 °C |
|---|---|
| Water pump driving power | 28.4% |
| Piston group friction | 4.4% |
| Total friction | 2.4% |
| CO2 emissions | 0.5% |
| Control Approach | Water Pump Energy Reduction | Friction Energy Reduction |
|---|---|---|
| Baseline 1, rule-based | Base | Base |
| Baseline 1 MPC | 4.4% | 0% |
| Advanced 2 MPC | 22.3% | 3.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Müller, J.; Besser, N.; Hermsen, P.; Pischinger, S.; Knauf, J.; Bagherzade, P.; Fryjan, J.; Balazs, A.; Gottorf, S. Virtual Development of Advanced Thermal Management Functions Using Model-in-the-Loop Applications. Energies 2023, 16, 3238. https://doi.org/10.3390/en16073238
Müller J, Besser N, Hermsen P, Pischinger S, Knauf J, Bagherzade P, Fryjan J, Balazs A, Gottorf S. Virtual Development of Advanced Thermal Management Functions Using Model-in-the-Loop Applications. Energies. 2023; 16(7):3238. https://doi.org/10.3390/en16073238
Chicago/Turabian StyleMüller, Jonas, Nico Besser, Philipp Hermsen, Stefan Pischinger, Jürgen Knauf, Pooya Bagherzade, Johannes Fryjan, Andreas Balazs, and Simon Gottorf. 2023. "Virtual Development of Advanced Thermal Management Functions Using Model-in-the-Loop Applications" Energies 16, no. 7: 3238. https://doi.org/10.3390/en16073238