
A Hybrid Approach of the Deep Learning Method and Rule-Based Method for Fault Diagnosis of Sucker Rod Pumping Wells
Abstract
:1. Introduction
2. Data Gathering and Preprocessing
3. Rule-Based Method for Fault Diagnosis
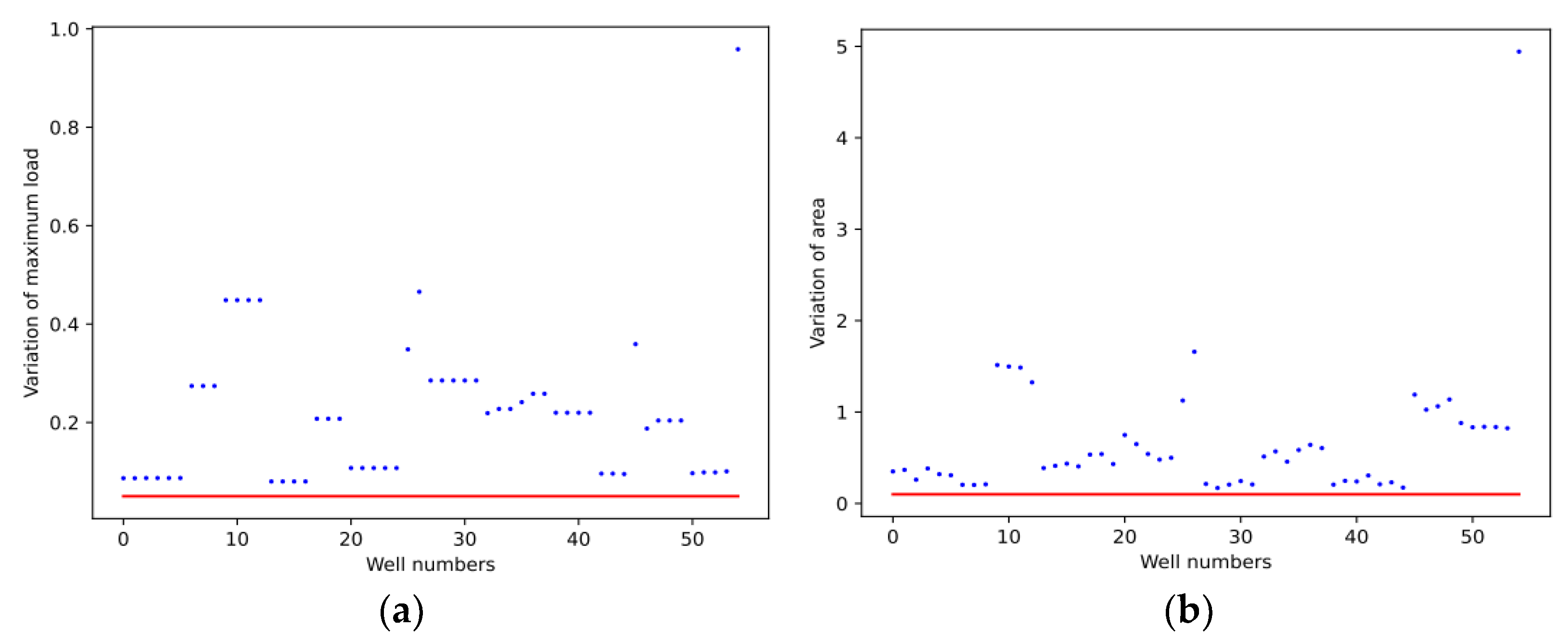
3.1. Analysis of Low Accuracy Working Status
- (1)
- Low-frequency status
- (2)
- Status of the dynamometer cards have similar shapes
- (3)
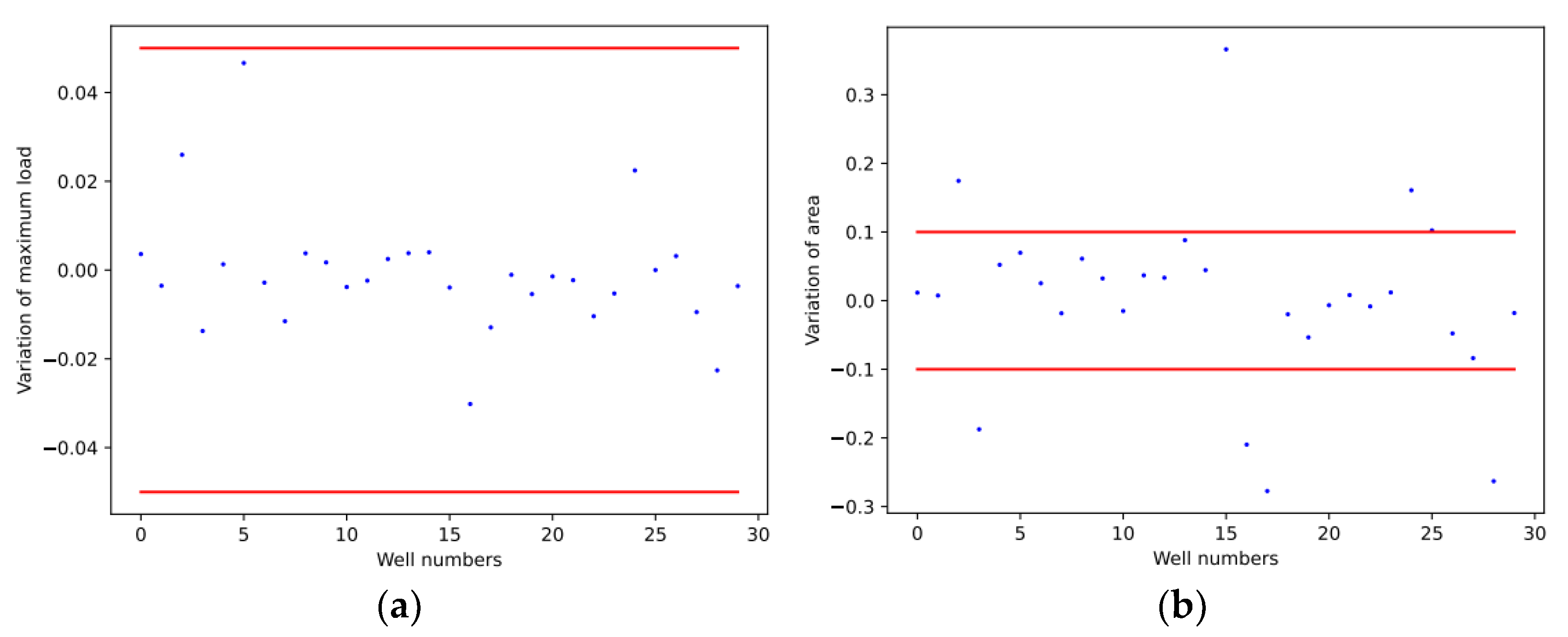
- Gradually changing status
3.2. Fault Diagnosis Knowledgebase
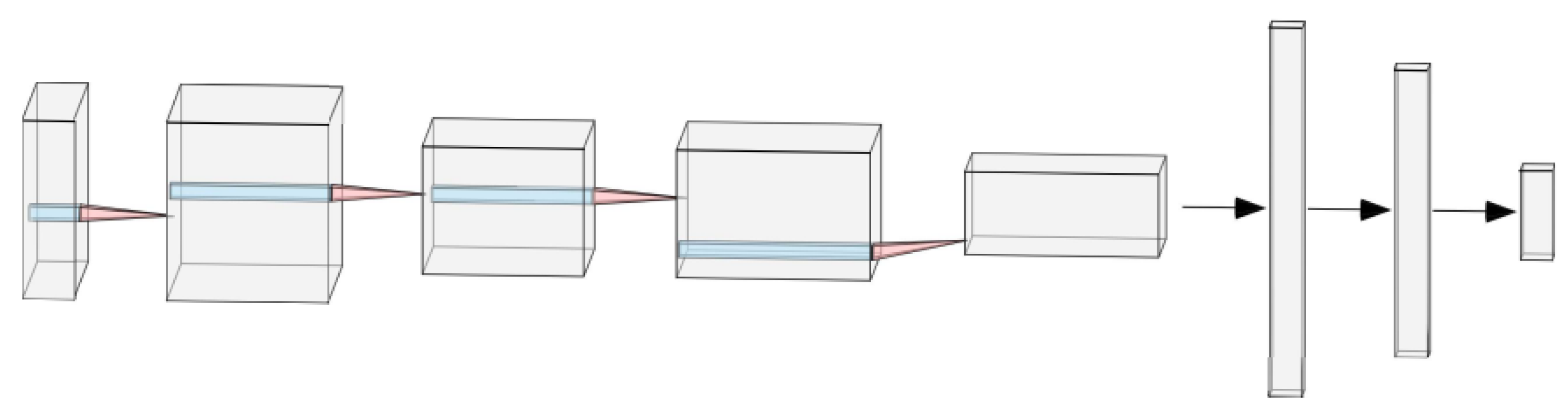
4. Deep Learning Method for Fault Diagnosis
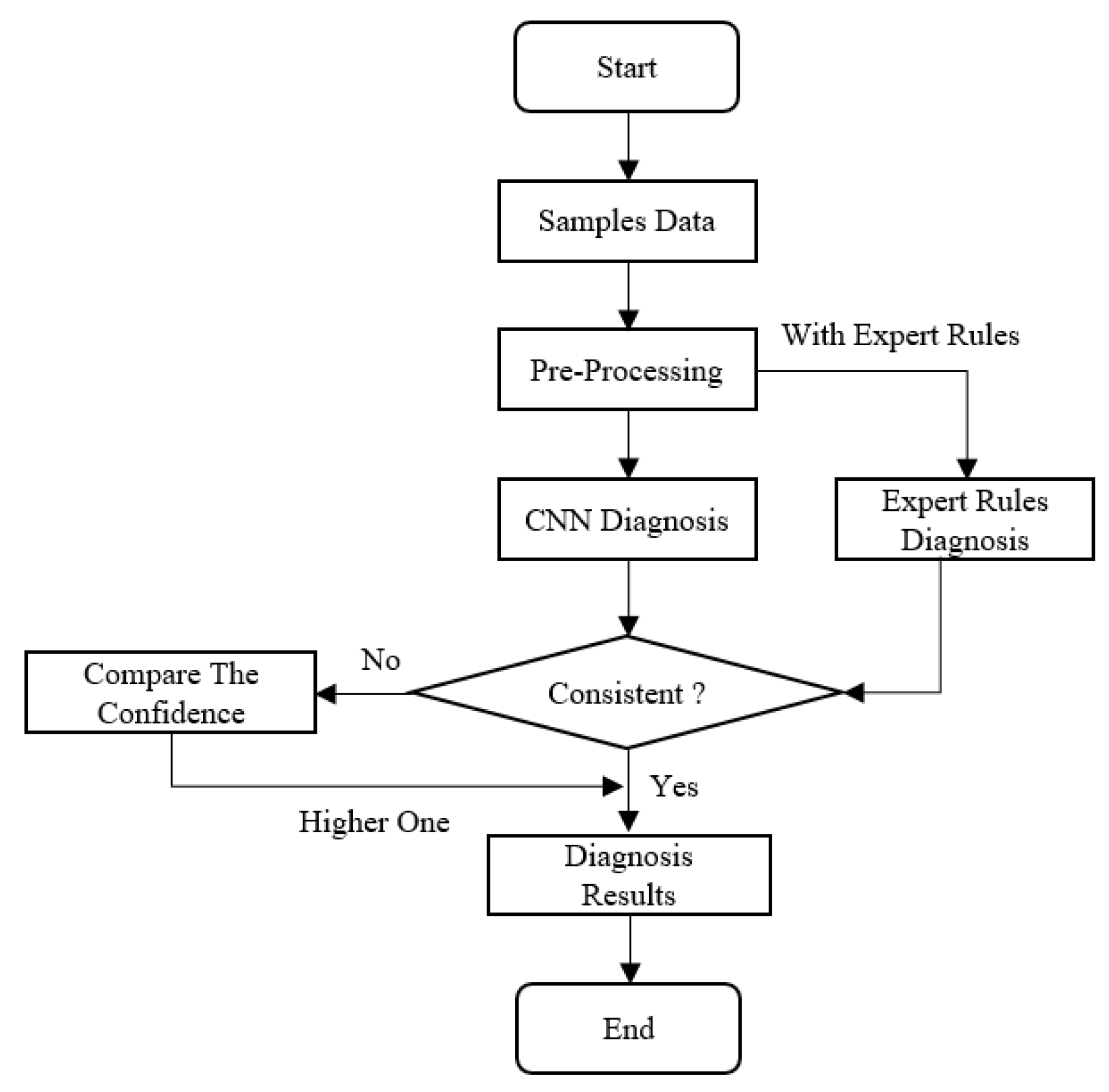
5. Combination of CNN and Expert Rules
5.1. Training and Testing
5.2. Result of Fault Diagnosis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tripp, H.A. A review: Analyzing beam-pumped wells. J. Pet. Technol. 1989, 41, 457–458. [Google Scholar] [CrossRef]
- Khormali, A.; Koochi, M.R.; Varfolomeev, M.A.; Ahmadi, S. Experimental study of the low salinity water injection process in the presence of scale inhibitor and various nanoparticles. J. Pet. Explor. Prod. Technol. 2022, 13, 903–916. [Google Scholar] [CrossRef]
- Reges, G.D.; Schnitman, L.; Reis, R.; Mota, F. A new approach to diagnosis of sucker rod pump systems by analyzing segments of downhole dynamometer cards. In Proceedings of the SPE Artificial Lift Conference—Latin America and Caribbean, Salvador, Brazil, 27–28 May 2015. [Google Scholar]
- Li, K.; Han, Y.; Wang, T. A novel prediction method for down-hole working conditions of the beam pumping unit based on 8-directions chain codes and online sequential extreme learning machine. J. Pet. Sci. Eng. 2018, 160, 285–301. [Google Scholar] [CrossRef]
- Yanfeng, H.; Cheng, L.; Xiang, W. Fault diagnosis of rod pump working conditions based on improved indicator AlexNet model. Ind. Saf. Environ. Prot. 2020, 46, 22–26. [Google Scholar]
- Lu, C.; Jiang, H.; Yang, J.; Wang, Z.; Zhang, M.; Li, J. Shale oil production prediction and fracturing optimization based on machine learning. J. Pet. Sci. Eng. 2022, 217, 110900. [Google Scholar] [CrossRef]
- Derek, H.J.; Jennings, J.W.; Morgan, S.M. Sucker rod pumping unit diagnostics using an expert system. In Proceedings of the Permian Basin Oil and Gas Recovery Conference, Midland, TX, USA, 10–11 March 1988. [Google Scholar]
- Lv, X.; Wang, H.; Zhang, X.; Liu, Y.; Jiang, D.; Wei, B. An evolutional SVM method based on incremental algorithm and simulated indicator diagrams for fault diagnosis in sucker rod pumping systems. J. Pet. Sci. Eng. 2021, 203, 108806. [Google Scholar] [CrossRef]
- Zheng, B.; Gao, X.; Li, X. Diagnosis of sucker rod pump based on generating dynamometer cards. J. Process Control 2019, 77, 76–88. [Google Scholar] [CrossRef]
- Johari, A.; Ghahramani, A.; Habibagahi, G. Prediction of a soil-water characteristic curve using a genetic-based neural network. Sci. Iran. 2006, 13, 284–294. [Google Scholar]
- Johari, A.; Habibagahi, G.; Ghahramani, A. Prediction of SWCC using artificial intelligent systems: A comparative study. Sci. Iran. 2011, 18, 1002–1008. [Google Scholar] [CrossRef] [Green Version]
- Jiao, J.; Zhao, M.; Lin, J.; Liang, K. A comprehensive review on convolutional neural network in machine fault diagnosis. Neurocomputing 2020, 417, 36–63. [Google Scholar] [CrossRef]
- Tian, H.; Deng, S.; Wang, C.; Ni, X.; Wang, H.; Liu, Y.; Ma, M.; Wei, Y.; Li, X. A novel method for prediction of paraffin deposit in sucker rod pumping system based on CNN indicator diagram feature deep learning. J. Pet. Sci. Eng. 2021, 206, 108986. [Google Scholar] [CrossRef]
- Wang, X.; He, Y.; Li, F.; Wang, Z.; Dou, X.; Xu, H.; Fu, L. A working condition diagnosis model of sucker rod pumping wells based on deep learning. SPE Prod. Oper. 2021, 36, 317–326. [Google Scholar] [CrossRef]
- Zhou, Y.; Kumar, A.; Parkash, C.; Vashishtha, G.; Tang, H.; Glowacz, A.; Dong, A.; Xiang, J. Development of entropy measure for selecting highly sensitive WPT band to identify defective components of an axial piston pump. Appl. Acoust. 2023, 203, 109225. [Google Scholar] [CrossRef]
- Gong, Y.; Mohammad, P. Pore-to-core upscaling of solute transport under steady-state two-phase flow conditions using dynamic pore network modeling approach. Transp. Porous Media 2020, 135, 181–218. [Google Scholar] [CrossRef]
- Xu, P.; Xu, S.; Yin, H. Application of self-organizing competitive neural network in fault diagnosis of suck rod pumping system. J. Pet. Sci. Eng. 2007, 58, 43–48. [Google Scholar] [CrossRef]
- Zhang, R.; Yin, Y.; Xiao, L.; Chen, D. A Real-Time Diagnosis Method of Reservoir-Wellbore-Surface Conditions in Sucker-Rod Pump Wells Based on Multidata Combination Analysis. J. Pet. Sci. Eng. 2021, 198, 108254. [Google Scholar] [CrossRef]
- Meyer, A. Vibration Fault diagnosis in wind turbines based on automated feature learning. Energies 2022, 15, 1514. [Google Scholar] [CrossRef]
- Lu, J.; Huang, J.; Lu, F. Sensor fault diagnosis for aero engine based on online sequential extreme learning machine with memory principle. Energies 2017, 10, 39. [Google Scholar] [CrossRef] [Green Version]
- Gou, C.; Zhou, Y.; Li, D. Driver attention prediction based on convolution and transformers. J. Supercomput. 2022, 78, 8268–8284. [Google Scholar] [CrossRef]
- Rajpurkar, P.; Hannun, A.Y.; Haghpanahi, M.; Bourn, C.; Ng, A.Y. Cardiologist-level arrhythmia detection with convolutional neural networks. arXiv 2017, arXiv:1707.01836. [Google Scholar]
- Abdalla, R.; Abu El Ela, M.; El-Banbi, A. Identification of downhole conditions in sucker rod pumped wells using deep neural networks and genetic algorithms (includes associated discussion). SPE Prod. Oper. 2020, 35, 435–447. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Vankdothu, R.; Hameed, M.A.; Fatima, H. A brain tumor identification and classification using deep learning based on CNN-LSTM method. Comput. Electr. Eng. 2022, 101, 107960. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Name | Data Description | Timespan | Unit | Example |
|---|---|---|---|---|
| ID | A unique mark for each record of data | / | / | 52E6875B238A4EC1 |
| WY | Rod displacement of one stroke cycle | Current stroke cycle | m | 0.029, 0.064, 0.113, …, 0.016, 0.006, 0.003 * |
| ZH | Rod load of one stroke cycle | Current stroke cycle | kN | 54.91, 56.02, 57.43, …, 51.48, 52.47, 53.68 * |
| ZDZH | Maximum load | 7 days | kN | 96.35, 96.41, 96.5, …, 96.36, 96.24, 96.18 ** |
| ZXZH | Minimum load | 7 days | kN | 42.77, 42.74, 42.68,…, 43.03, 43.0, 42.92 ** |
| GTMJ | Area of dynamometer card | 7 days | cm2 | 54.22, 53.32, 54.25, …, 54.52, 54.43, 54.37 ** |
| ZHC | Difference between maximum load and minimum load | 7 days | kN | 18.12, 18.16, 19.02, …, 17.36, 18.23, 18.37 ** |
| Fault Category | The Variation of Characteristic Parameters |
|---|---|
| Traveling valve leakage | Maximum load drop >2.5% Area of surface dynamometer card drop >10% |
| Standing valve leakage | Maximum load drop >2.5% Area of surface dynamometer card drop >10% |
| Sudden sucker rod break | Maximum load drop >10% Load difference drop >45% |
| Paraffin deposition | Maximum load rise >5% Area of surface dynamometer card rise >10% |
| Pumping with gushing | Maximum load variation within ±5% Area of surface dynamometer card within ±10% |
| Layer | Convolution Kernel Size | Step of Convolution Kernel | Number of Convolution Kernels | Output Size | Weight | Parameters |
|---|---|---|---|---|---|---|
| Convolution | 3 × 3 | 2 | 32 | 64 × 48 × 32 | 3 × 3 × 1 × 32 | 896 |
| Pooling | 3 × 3 | 2 | 32 | 22 × 16 × 32 | / | / |
| Convolution | 3 × 3 | 1 | 64 | 22 × 16 × 64 | 3 × 3 × 32 × 64 | 18,496 |
| Pooling | 3 × 3 | 1 | 64 | 8 × 6 × 64 | / | / |
| FC | / | / | / | 1 × 1 × 3072 | 3072 × 4096 | 1,573,376 |
| FC | / | / | / | 1 × 1 × 512 | 512 × 3072 | 65,664 |
| Output | / | / | / | 1 × 1 × 7 | / | 903 |
| Label | Dynamometer Card | Related Vectors | The Variation of Characteristic Parameters | Output of CNN | Output of Expert Rules | Result |
|---|---|---|---|---|---|---|
| Traveling valve leakage |  | [0.0, 0.0, 0.003,…, 0.009, 0.003, 0.0] | / | [0.0873, 0.0006, 0.8107 0.0023, 0.0001, 0.0154, 0.0836] | Traveling valve leakage (Confidence: 0.5) | Traveling valve leakage |
| [52.55, 53.13, 54.35,…, 52.49, 52.58, 52.52] | / | |||||
| [80.6, 80.54, 80.78,…, 77.11, 76.96, 77.14] | −0.03 | |||||
| [54.15, 54.62, 54.0,…, 49.81, 49.87, 49.99] | 0.03 | |||||
| [110.5, 111.39, 111.49,…, 44.72, 43.71, 43.91] | −0.27 | |||||
| [26.45, 25.92, 26.78,…, 27.3, 27.09, 27.15] | 0.08 |
| Label | Dynamometer Card | Related Vectors | The Variation of Characteristic Parameters | Output of CNN | Output of Expert Rules | Result |
|---|---|---|---|---|---|---|
| Standing valve leakage |  | [0.0, 0.0, 0.0,…, 0.006, 0.003, 0.0] | / | [0.0001, 0.0138, 0.0146, 0.9582, 0.0131, 0.0002, 0.0000] | Standing valve leakage (Confidence: 0.5) | Standing valve leakage |
| [61.91, 63.13, 64.43,…, 57.66, 59.23, 60.79] | / | |||||
| [83.14, 83.26, 83.66,…, 79.62, 79.73, 80.02] | −0.05 | |||||
| [41.96, 42.01, 41.27,…, 47.86, 47.83, 47.6] | −0.08 | |||||
| [150.89, 151.77, 157.82,…, 107.5, 109.43, 110.69] | −0.12 | |||||
| [41.18, 41.28, 42.39,…, 31.76, 31.9, 32.42] | −0.06 |
| Label | Dynamometer Card | Related Vectors | The Variation of Characteristic Parameters | Output of CNN | Output of Expert Rules | Result |
|---|---|---|---|---|---|---|
| Sudden sucker rod break |  | [0.0, 0.01, 0.019,…, 0.007, 0.007, 0.003] | / | [0.1024, 0.0002, 0.0528, 0.0000, 0.5533, 0.0001, 0.2914] | Sudden sucker rod break (Confidence: 0.8) | Sudden sucker rod break |
| [51.79, 52.0, 52.06,…, 51.2, 51.32, 51.55] | / | |||||
| [73.69, 73.75, 73.66,…, 74.35, 52.89, 52.6] | −0.27 | |||||
| [59.49, 59.46, 59.28,…, 58.45, 51.2, 50.63] | −0.05 | |||||
| [28.54, 28.33, 28.15,…, 20.58, 4.86, 6.14] | −0.89 | |||||
| [14.2, 14.29, 14.38,…, 15.9, 1.78, 1.97] | −0.81 |
| Label | Dynamometer Card | Related Vectors | The Variation of Characteristic Parameters | Output of CNN | Output of Expert Rules | Result |
|---|---|---|---|---|---|---|
| Paraffin deposition |  | [0.0, 0.005, 0.005,…, 0.014, 0.0, 0.0] | / | [0.2921, 0.3180, 0.0044, 0.0873, 0.0008, 0.2045, 0.0929] | Paraffin deposition (Confidence: 0.7) | Paraffin deposition |
| [53.15, 54.65, 56.3,…, 51.44, 51.7, 52.18] | / | |||||
| [87.31, 87.49, 87.28,…, 93.47, 91.64, 93.44] | 0.06 | |||||
| [53.29, 53.53, 53.71,…, 46.45, 47.37, 47.39] | −0.18 | |||||
| [80.79, 74.91, 81.24,…, 121.63, 126.87, 125.77] | 0.82 | |||||
| [34.02, 33.96, 33.57,…, 47.02, 44.27, 46.05] | 0.24 |
| Label | Dynamometer Card | Related Vectors | The Variation of Characteristic Parameters | Output of CNN | Output of Expert Rules | Result |
|---|---|---|---|---|---|---|
| Pumping with gushing |  | [0.0, 0.004, 0.02,…, 0.055, 0.026, 0.004] | / | [0.0137, 0.0158, 0.0966, 0.0000, 0.1775, 0.0791, 0.6173] | Pumping with gushing (Confidence: 0.9) | Pumping with gushing |
| [34.19, 35.04, 35.23,…, 31.83, 32.33, 33.16] | / | |||||
| [35.13, 35.13, 35.02,…, 35.11, 35.13, 35.23] | 0.01 | |||||
| [28.44, 28.46, 28.55,…, 28.46, 28.58, 28.58] | −0.01 | |||||
| [19.85, 19.71, 19.6,…, 19.93, 19.71, 20.04] | −0.04 | |||||
| [6.69, 6.67, 6.47,…, 6.65, 6.55, 6.65] | −0.05 |
| Fault Category | Number of Samples | CNN Accuracy | Hybrid Accuracy |
|---|---|---|---|
| Normal | 358 | 94.12% | / |
| Insufficient liquid supply | 1071 | 94.44% | / |
| Traveling valve leakage | 96 | 66.66% | 88.89% |
| Standing valve leakage | 71 | 71.43% | 85.71% |
| Sudden sucker rod break | 385 | 78.95% | 100% |
| Paraffin deposition | 55 | 72.73% | 100% |
| Pumping with gushing | 30 | 80.00% | 100% |
| All | 2066 | 76.25% | 97.50% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Guo, Z.; Wang, X.; Abdul, W. A Hybrid Approach of the Deep Learning Method and Rule-Based Method for Fault Diagnosis of Sucker Rod Pumping Wells. Energies 2023, 16, 3170. https://doi.org/10.3390/en16073170
He Y, Guo Z, Wang X, Abdul W. A Hybrid Approach of the Deep Learning Method and Rule-Based Method for Fault Diagnosis of Sucker Rod Pumping Wells. Energies. 2023; 16(7):3170. https://doi.org/10.3390/en16073170
Chicago/Turabian StyleHe, Yanfeng, Zhijie Guo, Xiang Wang, and Waheed Abdul. 2023. "A Hybrid Approach of the Deep Learning Method and Rule-Based Method for Fault Diagnosis of Sucker Rod Pumping Wells" Energies 16, no. 7: 3170. https://doi.org/10.3390/en16073170