
Different Control Techniques of Permanent Magnet Synchronous Motor with Fuzzy Logic for Electric Vehicles: Analysis, Modelling, and Comparison



Abstract
:1. Introduction
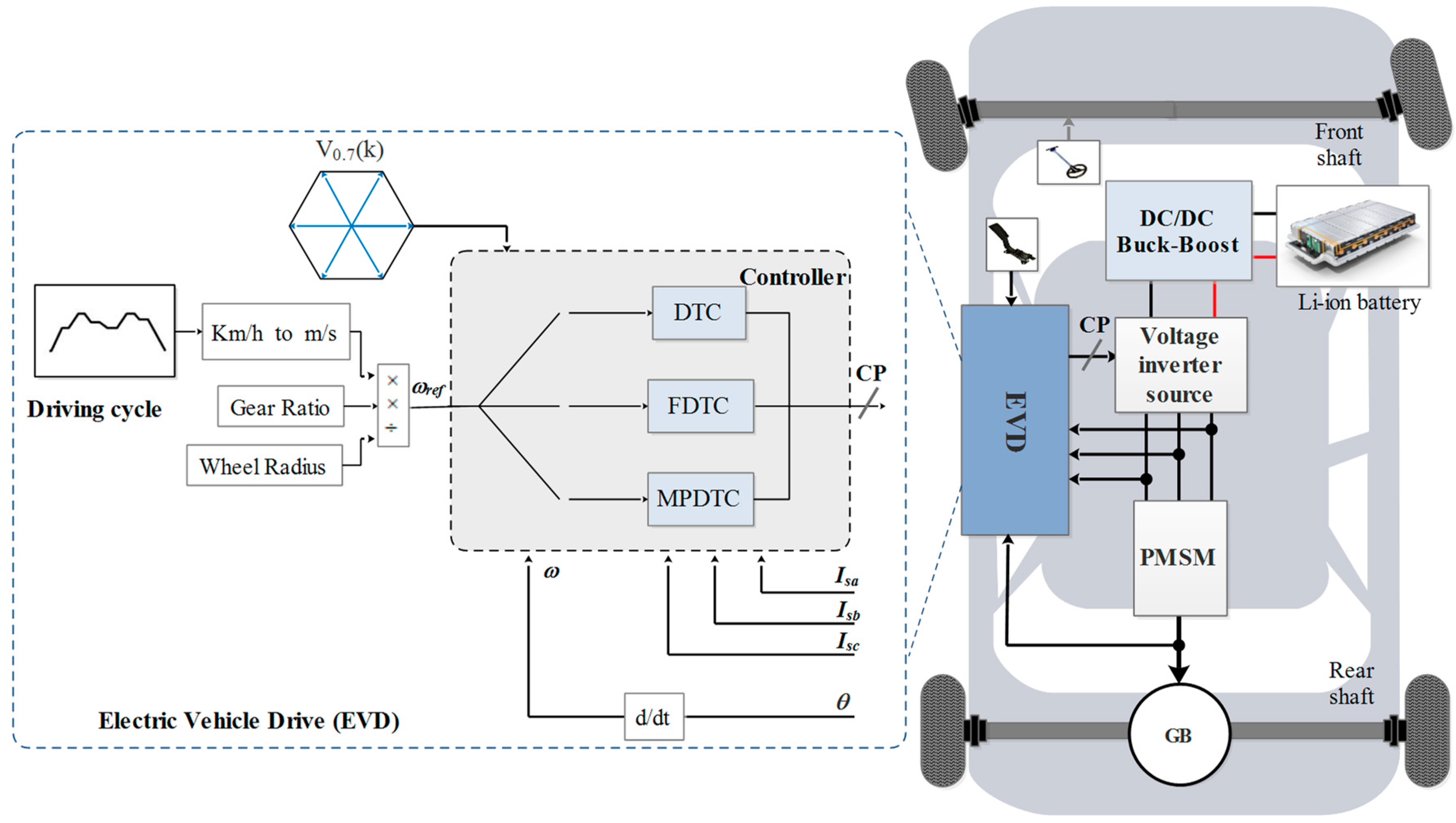
2. System Configuration and Modeling
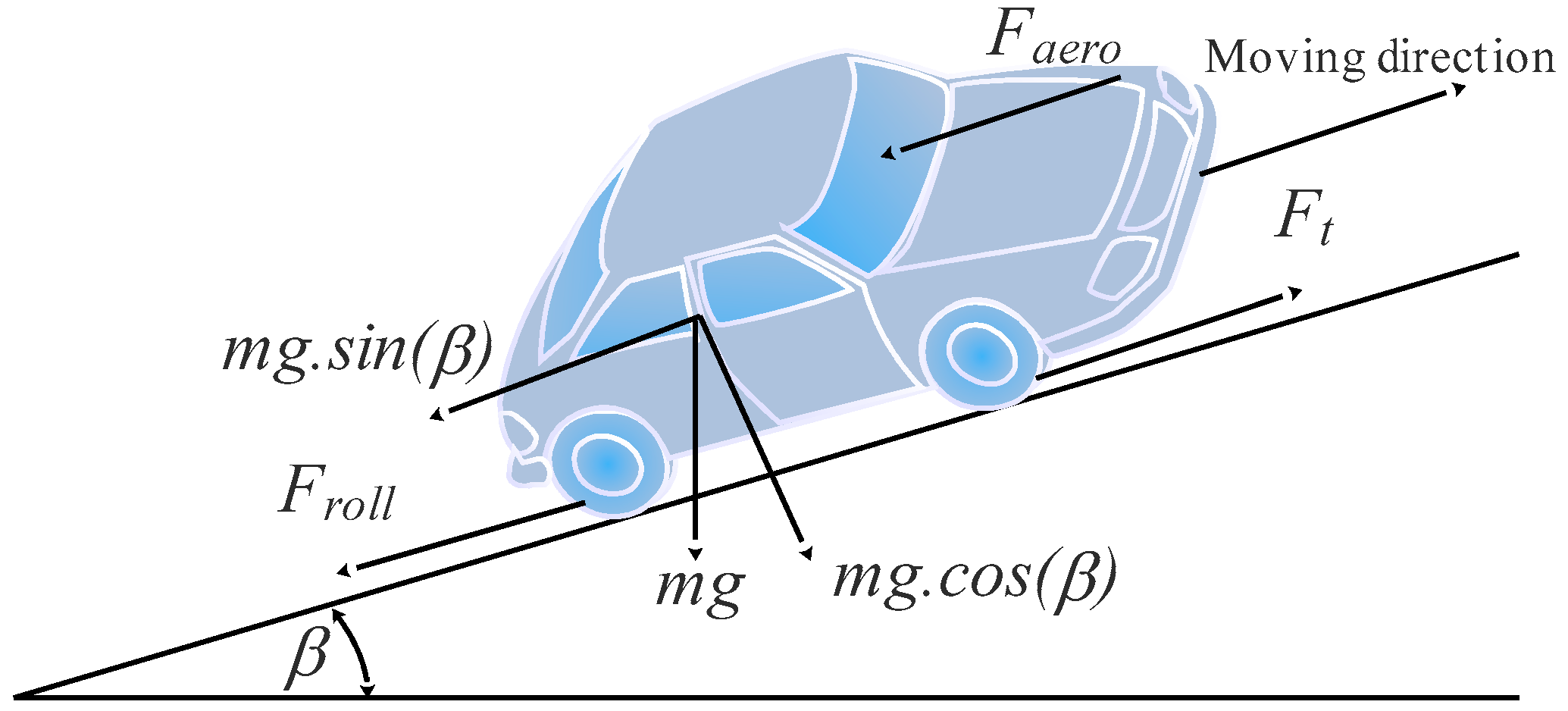
2.1. Mathematical Model of the Electric Vehicle
2.1.1. Rolling Resistance Force
2.1.2. Aerodynamic Drag
2.1.3. Slope Force
2.1.4. Acceleration Force
2.2. Voltage Source Inverter Model
2.3. Permanent Magnet Synchronous Motor Model
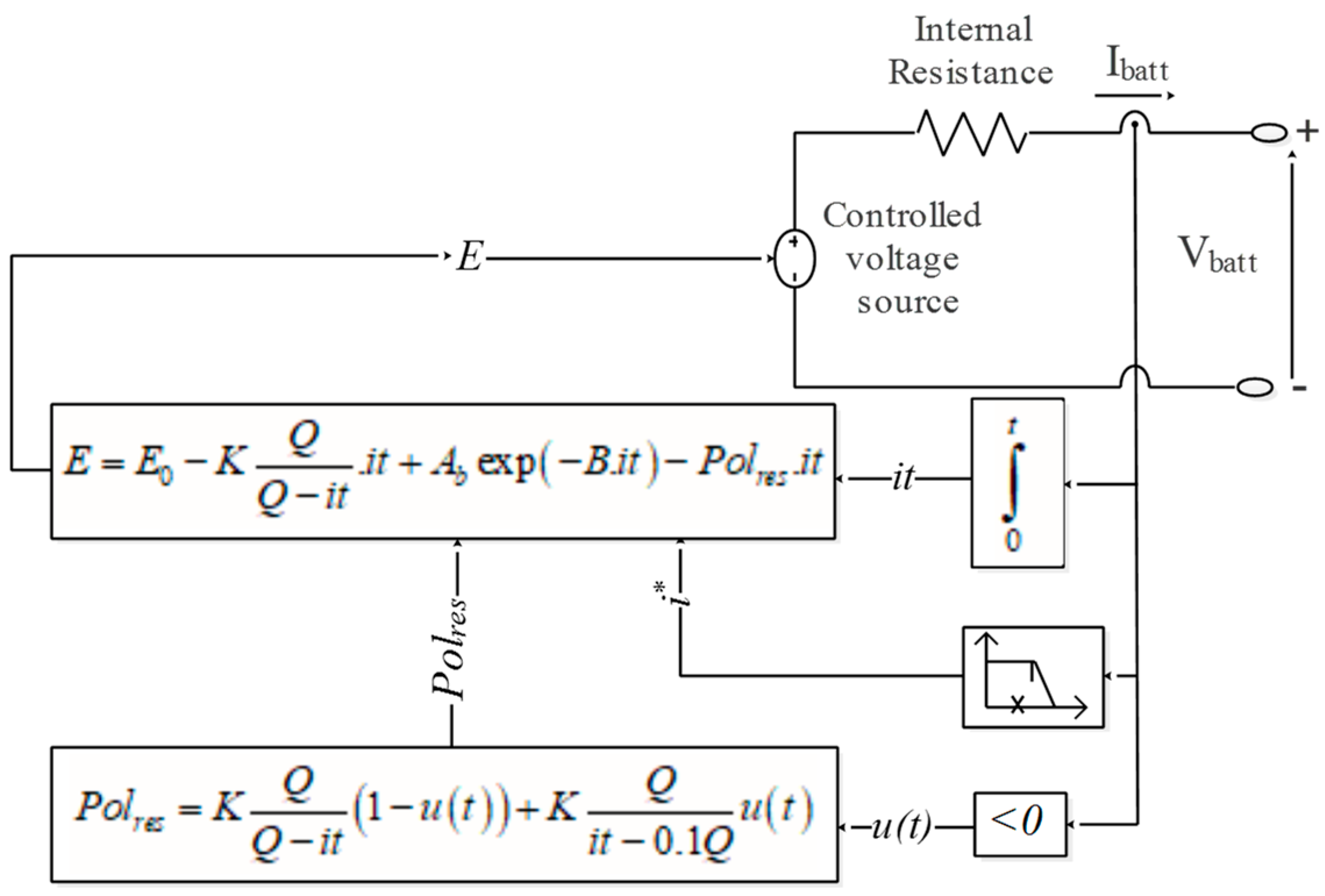
2.4. Battery Model
3. Control Topologies
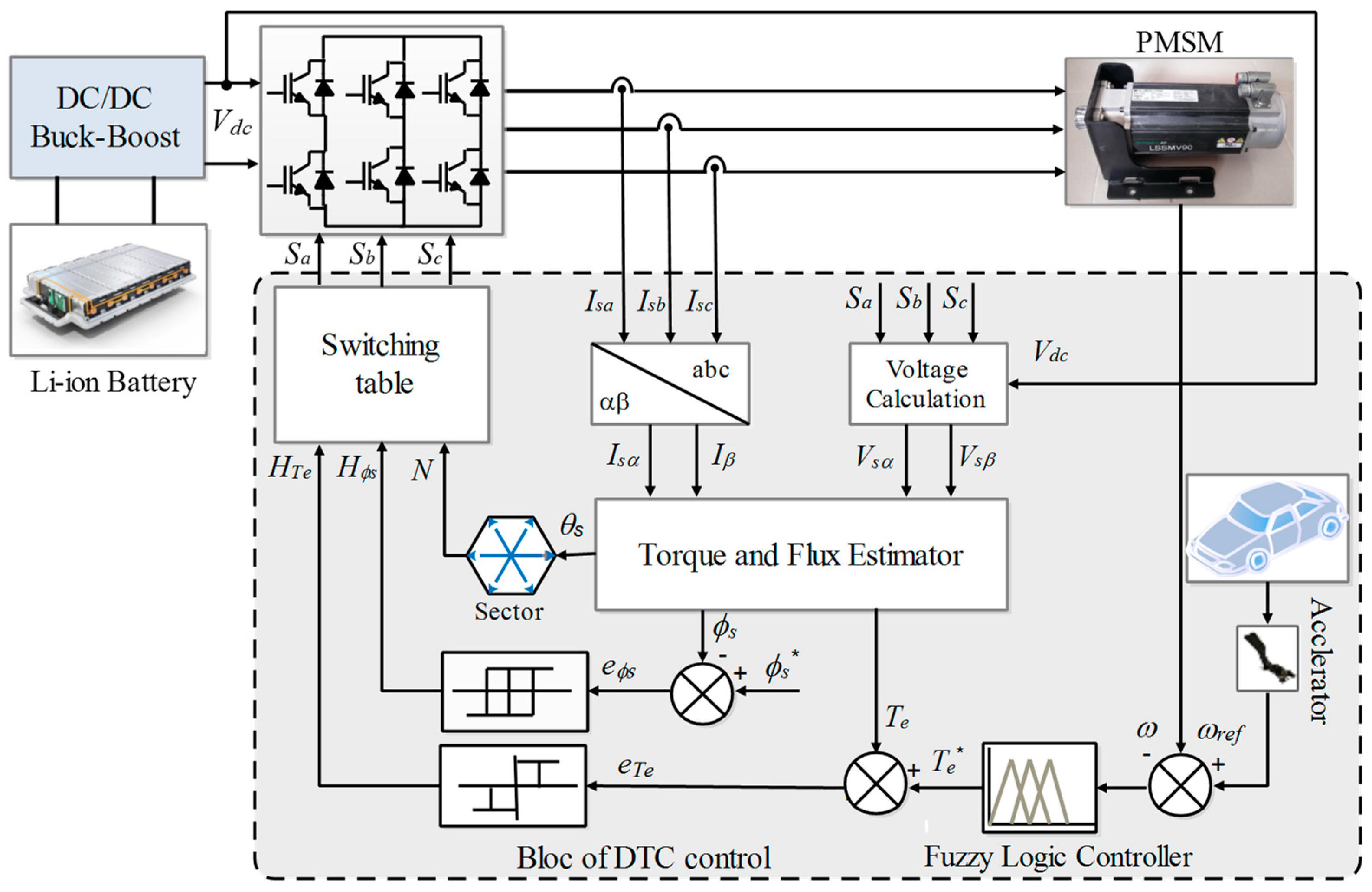
3.1. Direct Torque Control (DTC)
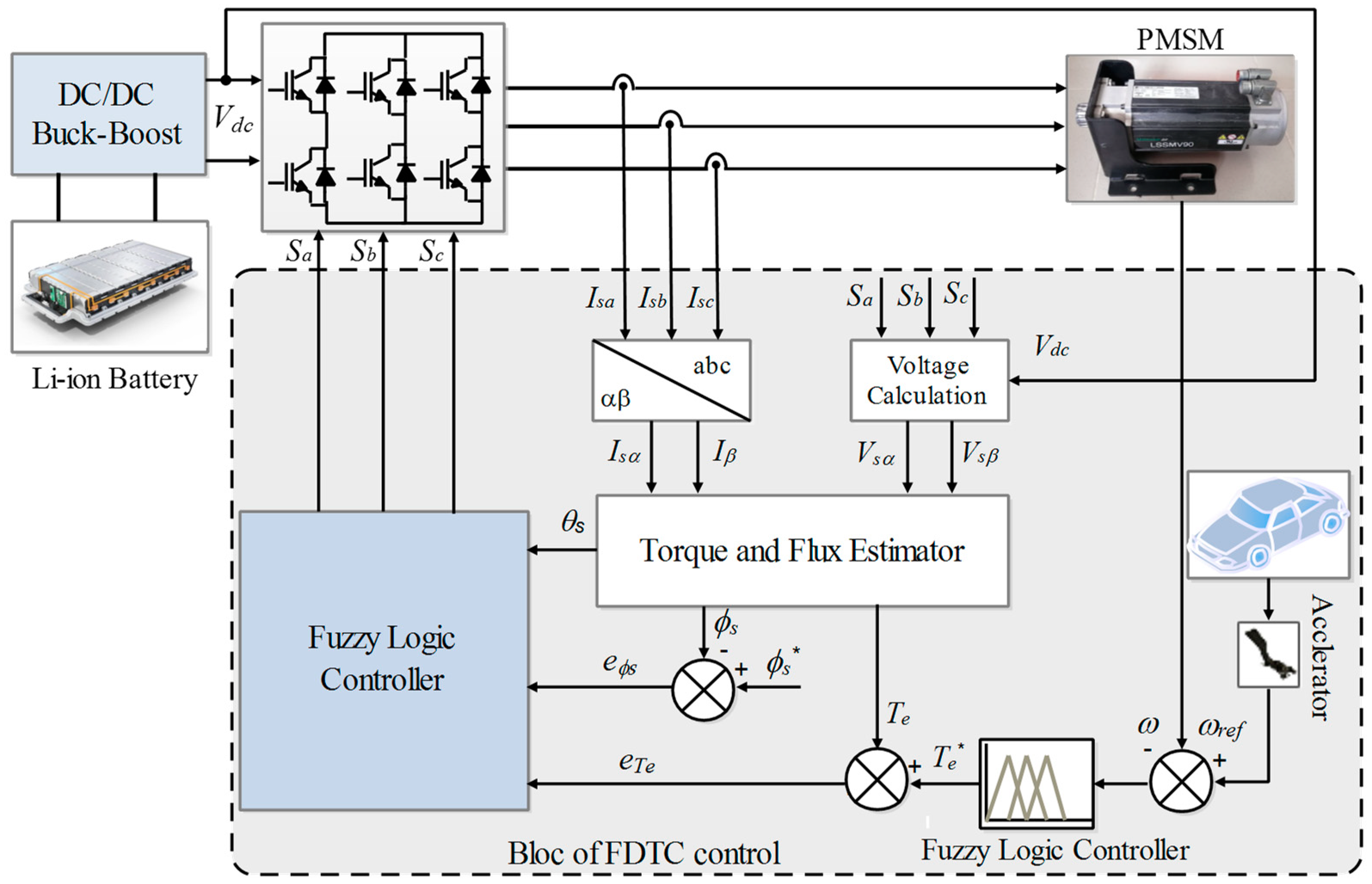
3.2. Fuzzy Direct Torque Control (FDTC)
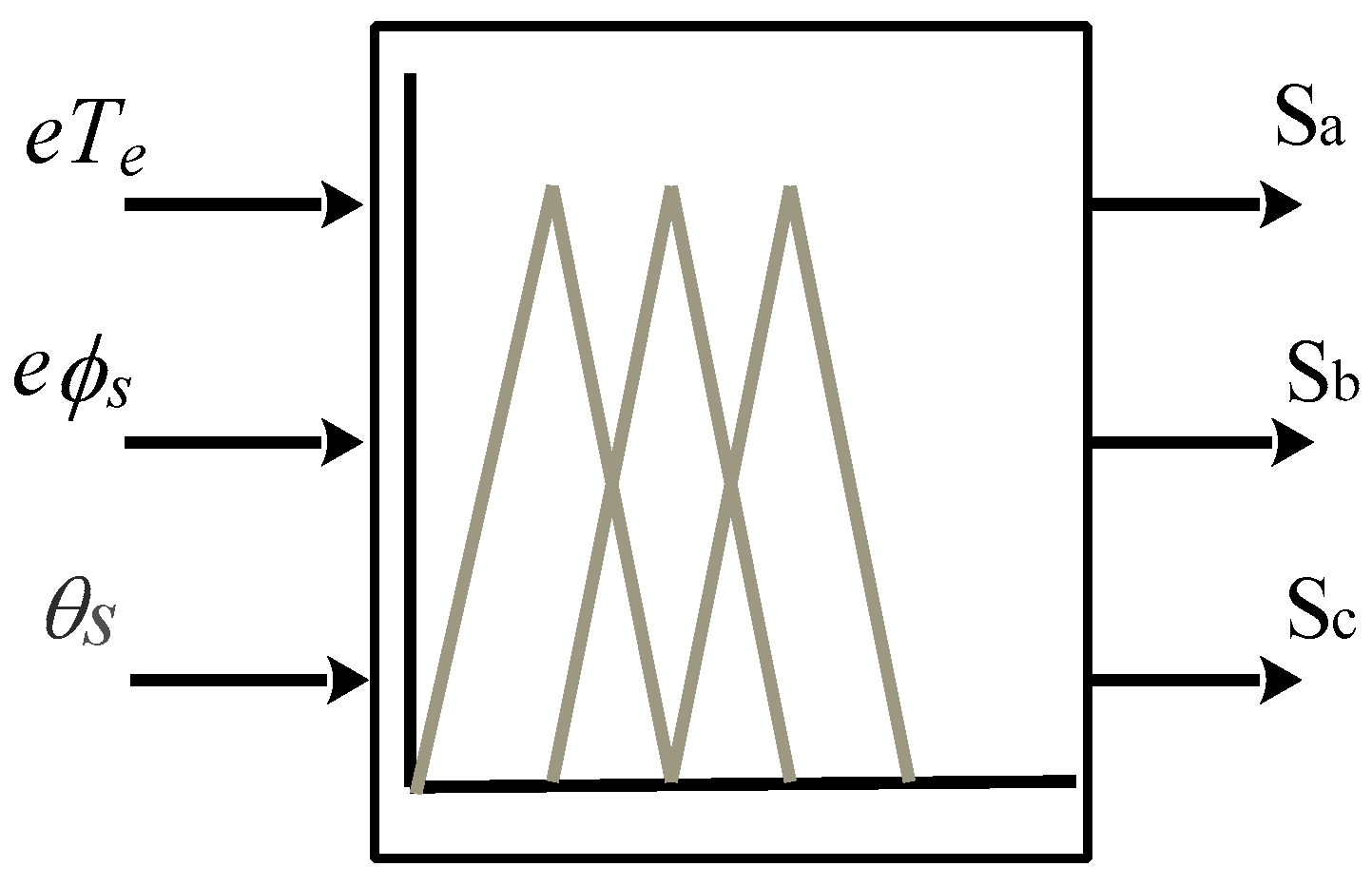
3.2.1. Fuzzification
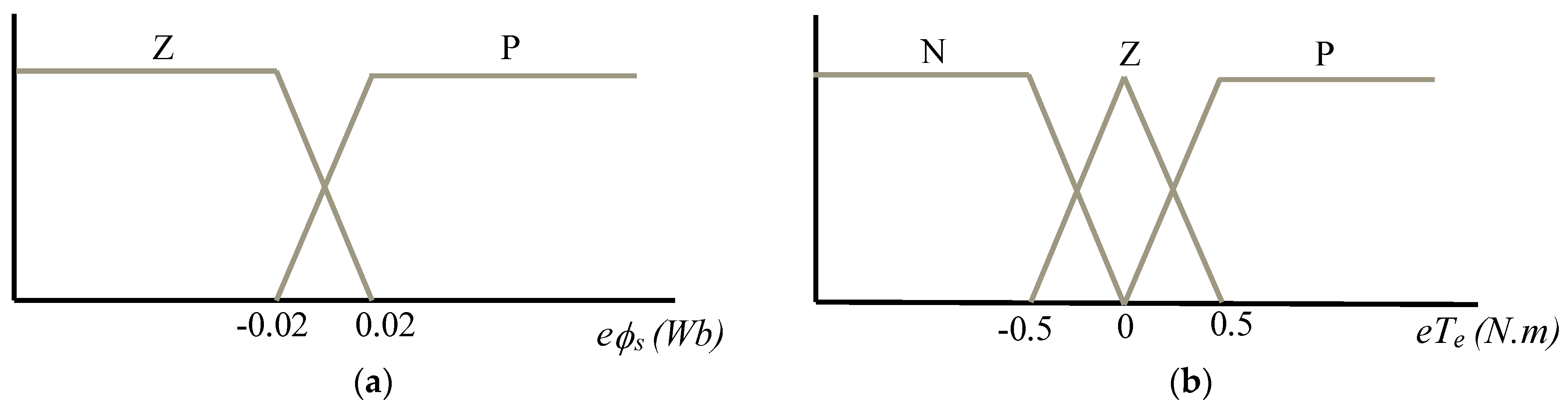
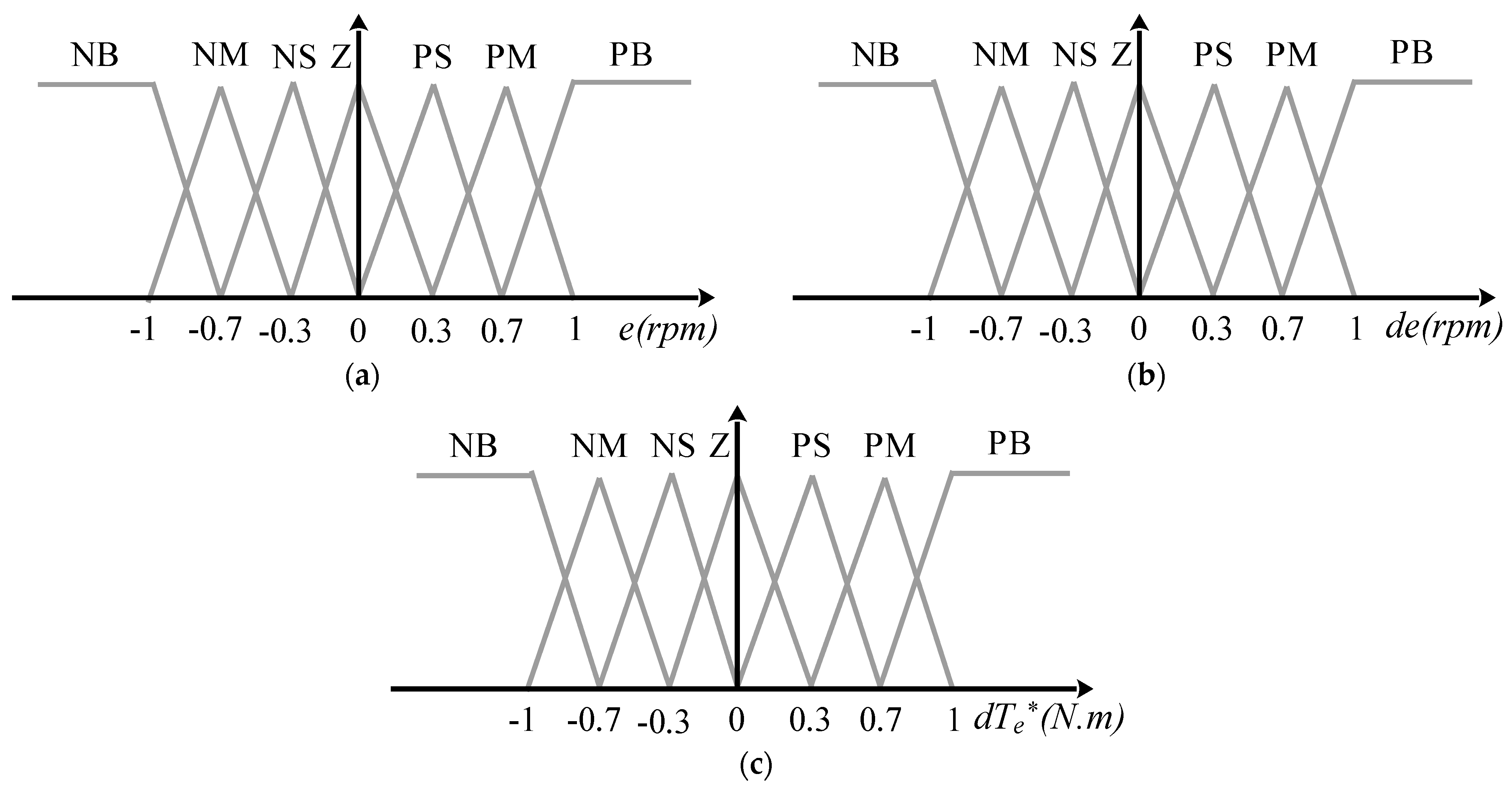
- For torque error. The torque error () can be classified into three linguistic variables: “Negative” (N), “Zero” (Z) and “Positive” (P). These variables are inspired by the behavior of a three-level hysteresis comparator. As illustrated in Figure 7a, the variable Z is represented by a triangular MF, while L and H are represented by trapezoidal MFs.
- For stator flux error. The stator flux error () can be classified into two linguistic variables “Negative” (N) and “Positive” (P) inspired from the behavior of the two-level hysteresis comparator. As shown in Figure 7b, the L and H variables are represented by two trapezoidal MFs.
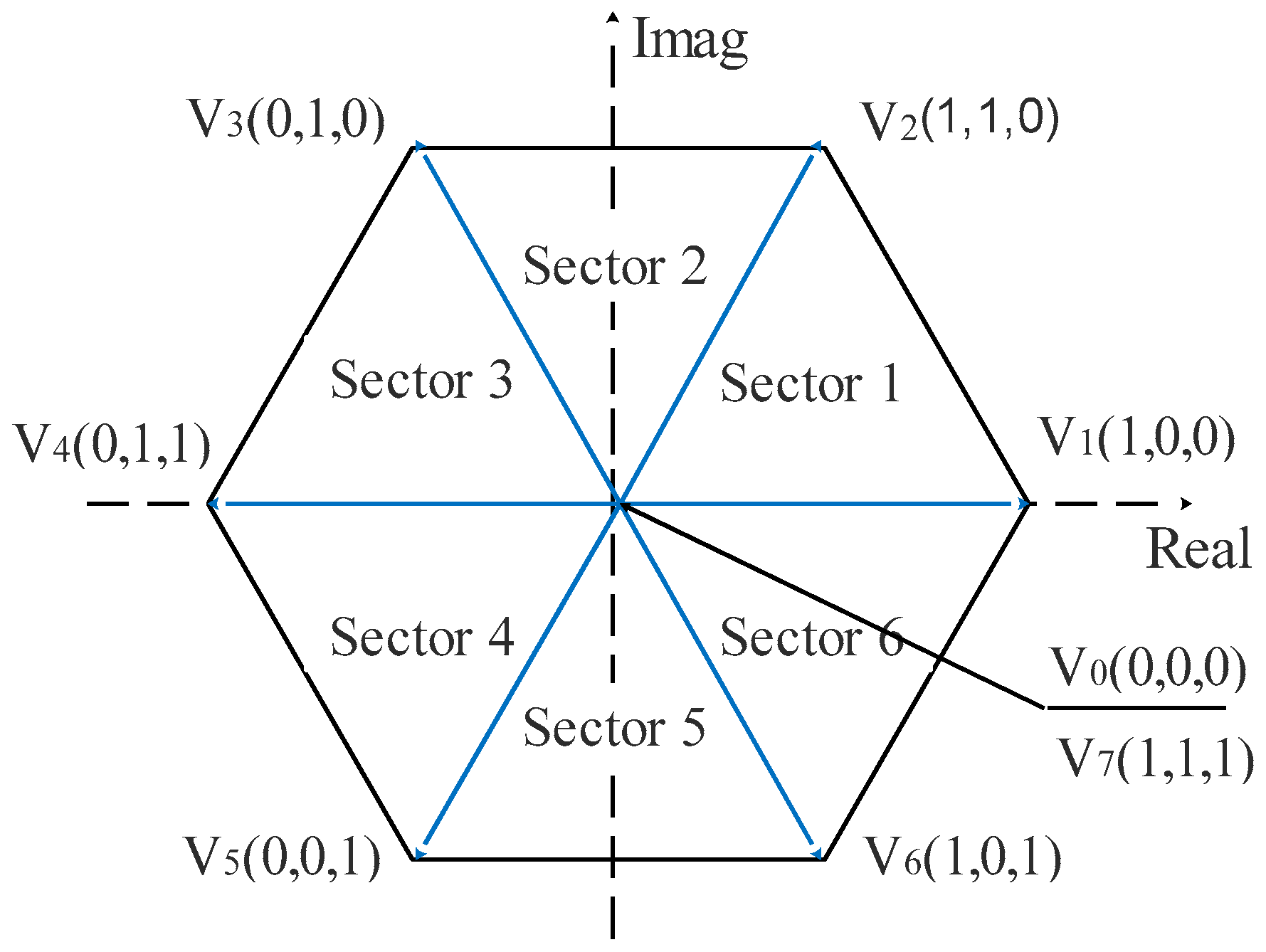
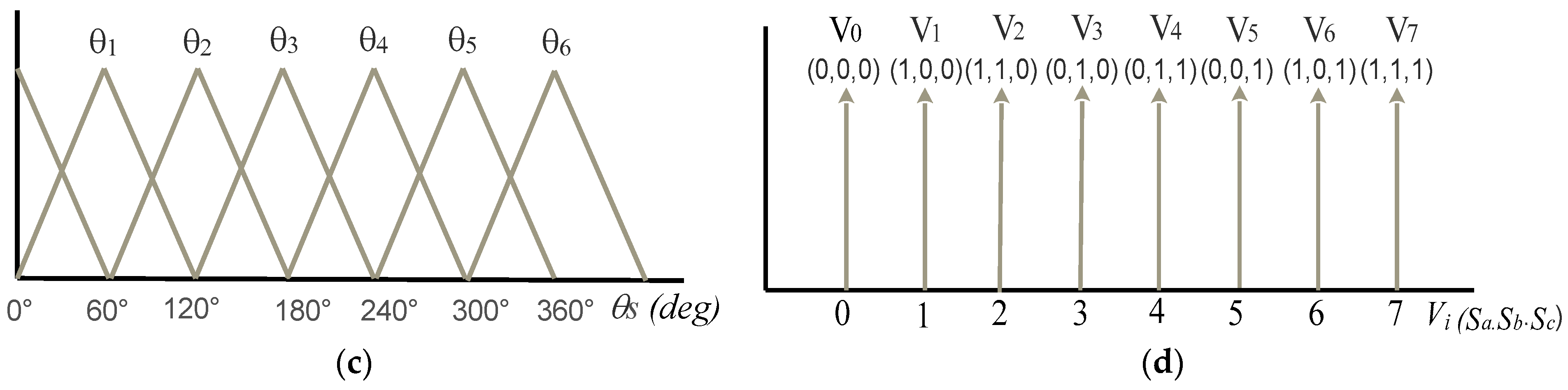
- For stator flux angle. The stator flux angle () can be divided into six linguistic variables ( to ) inspired by the six sectors of the sector selector. As shown in Figure 7c, the six variables are represented by isosceles triangular MFs.
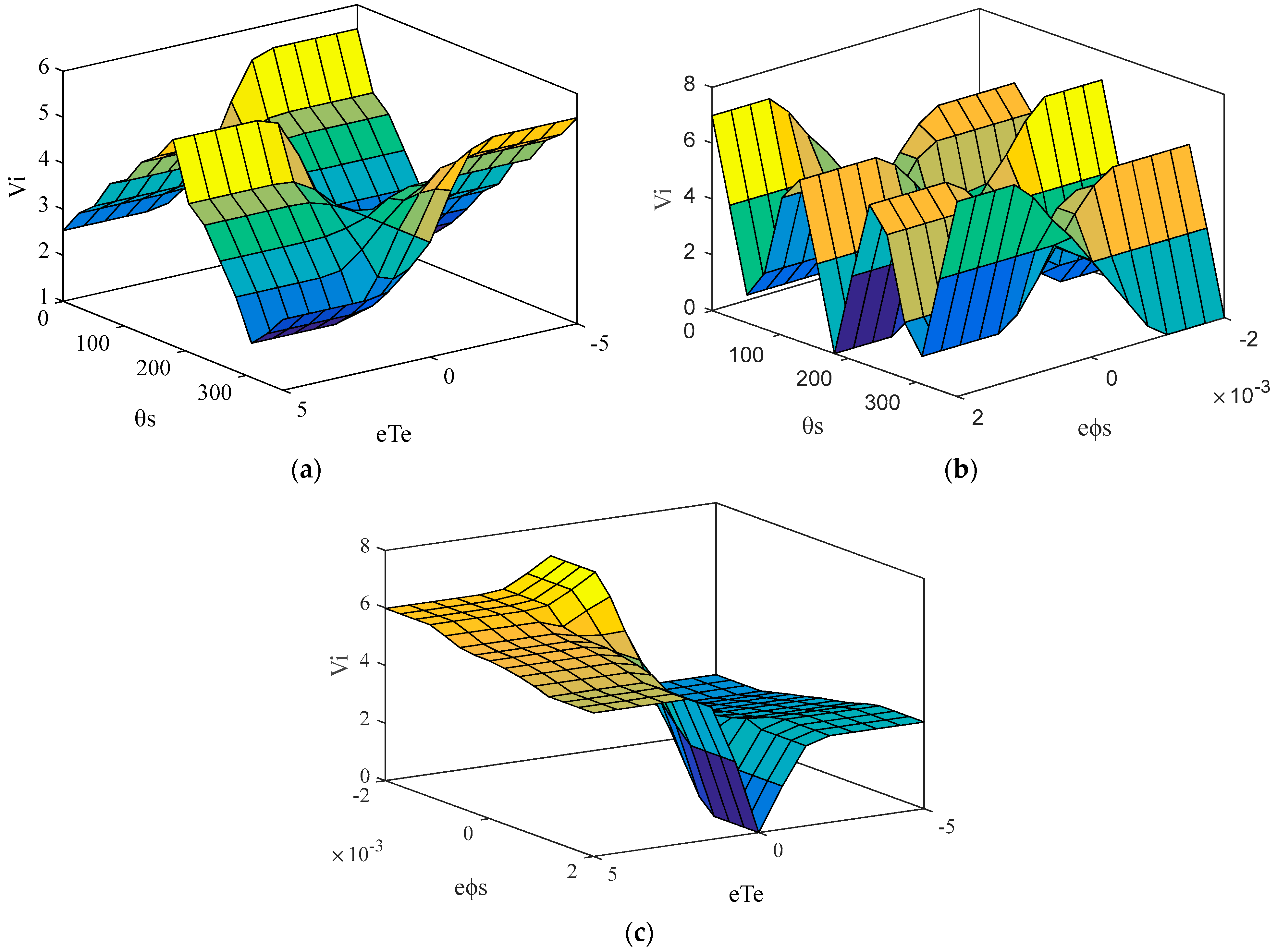
3.2.2. Fuzzy Control Rules
3.2.3. Defuzzification
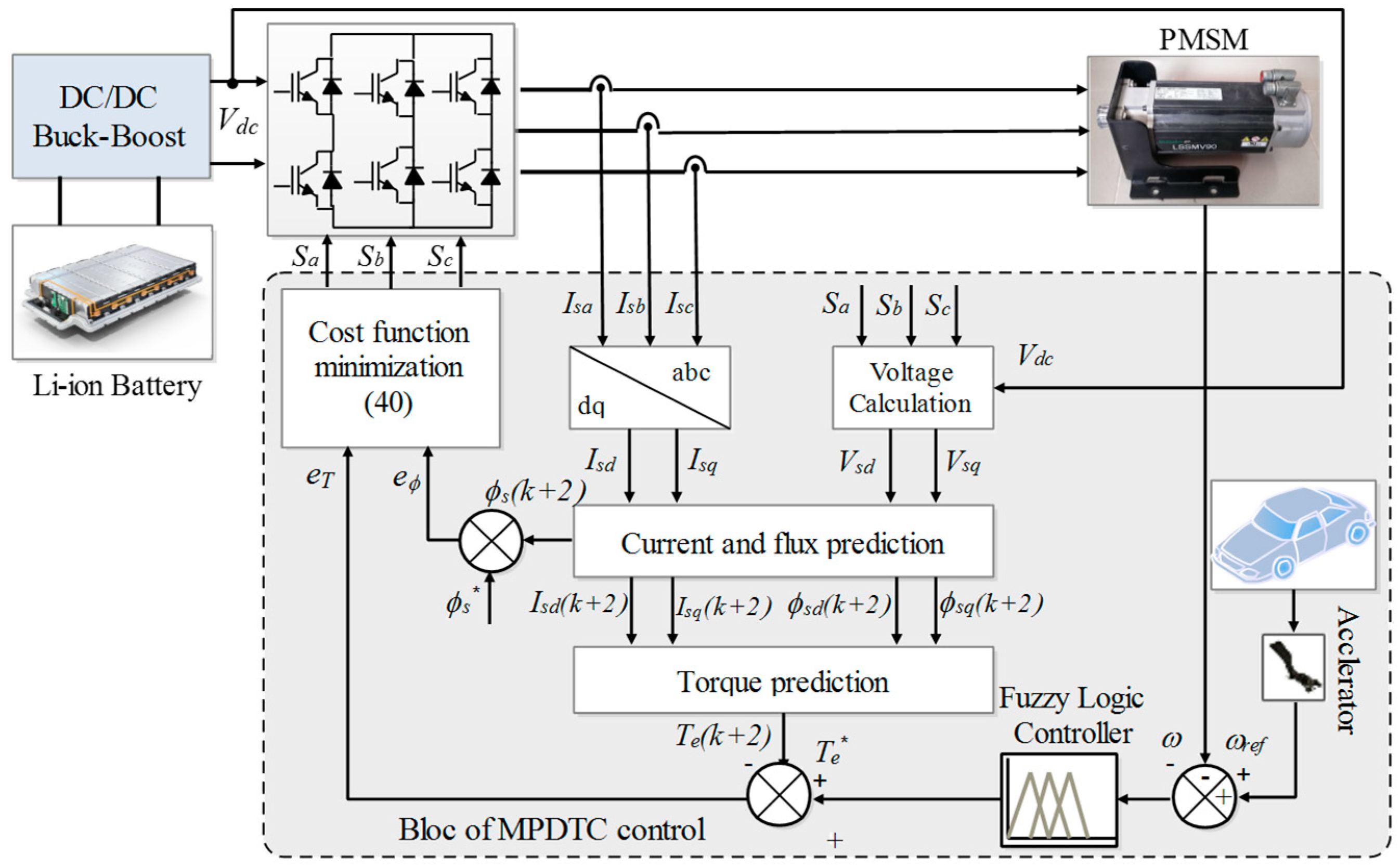
3.3. Model Predictive Direct Torque Control (MPDTC)
3.3.1. Current, Flux and Torque Predictions
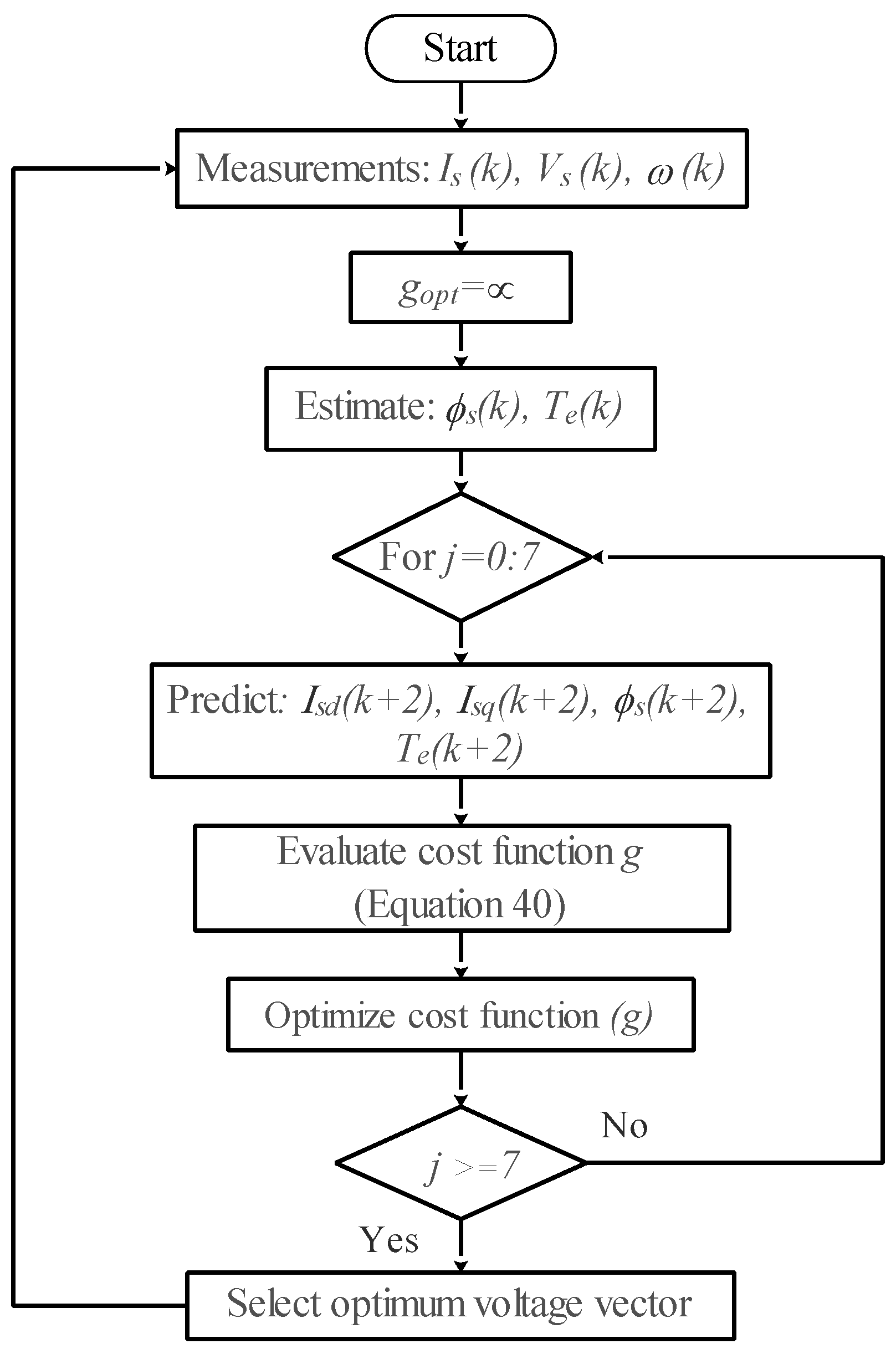
3.3.2. Cost Function Minimization
3.3.3. Time Delay Compensation
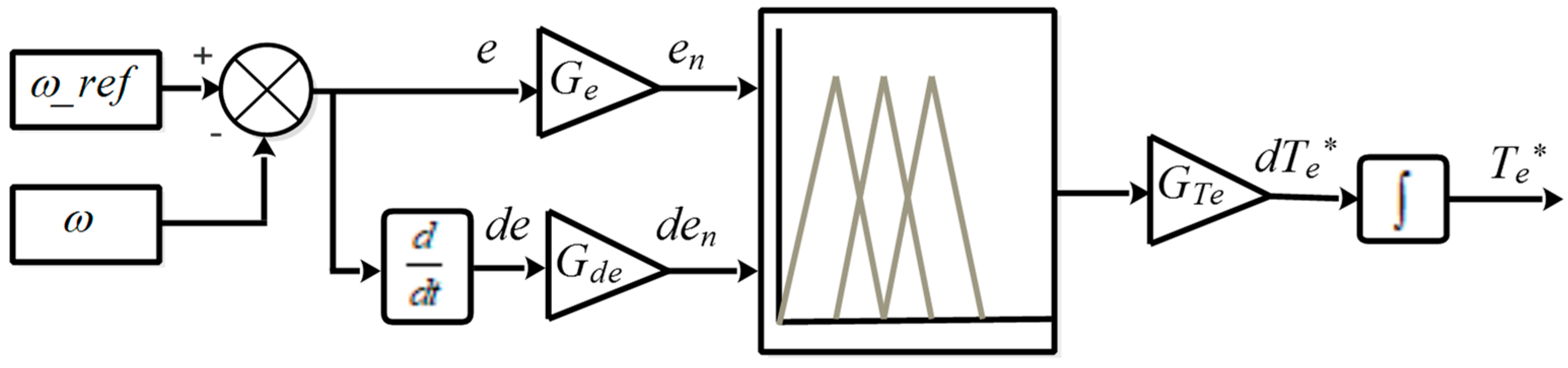
3.4. Fuzzy Logic Speed Control
4. Simulation Results and Discussion
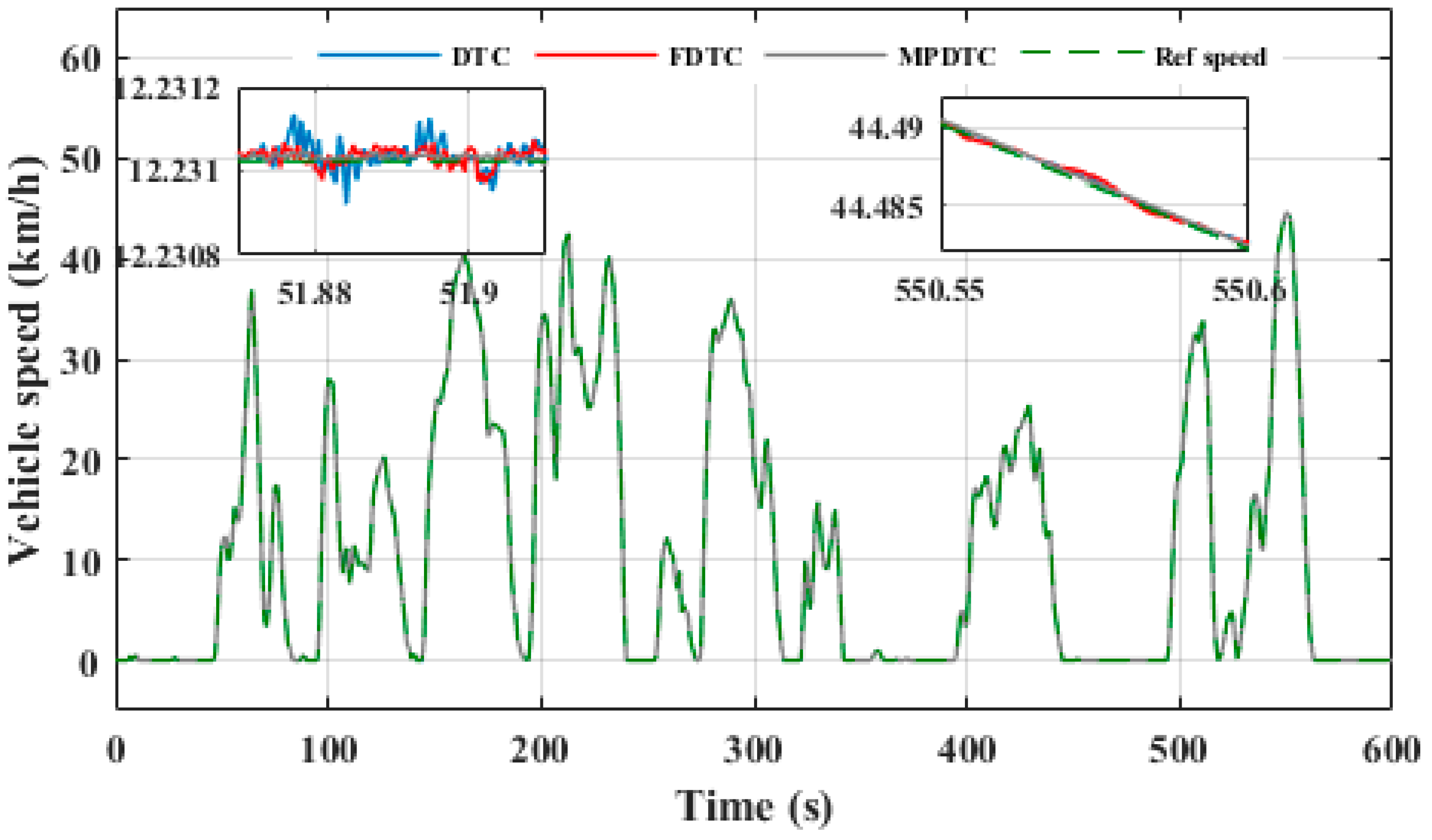
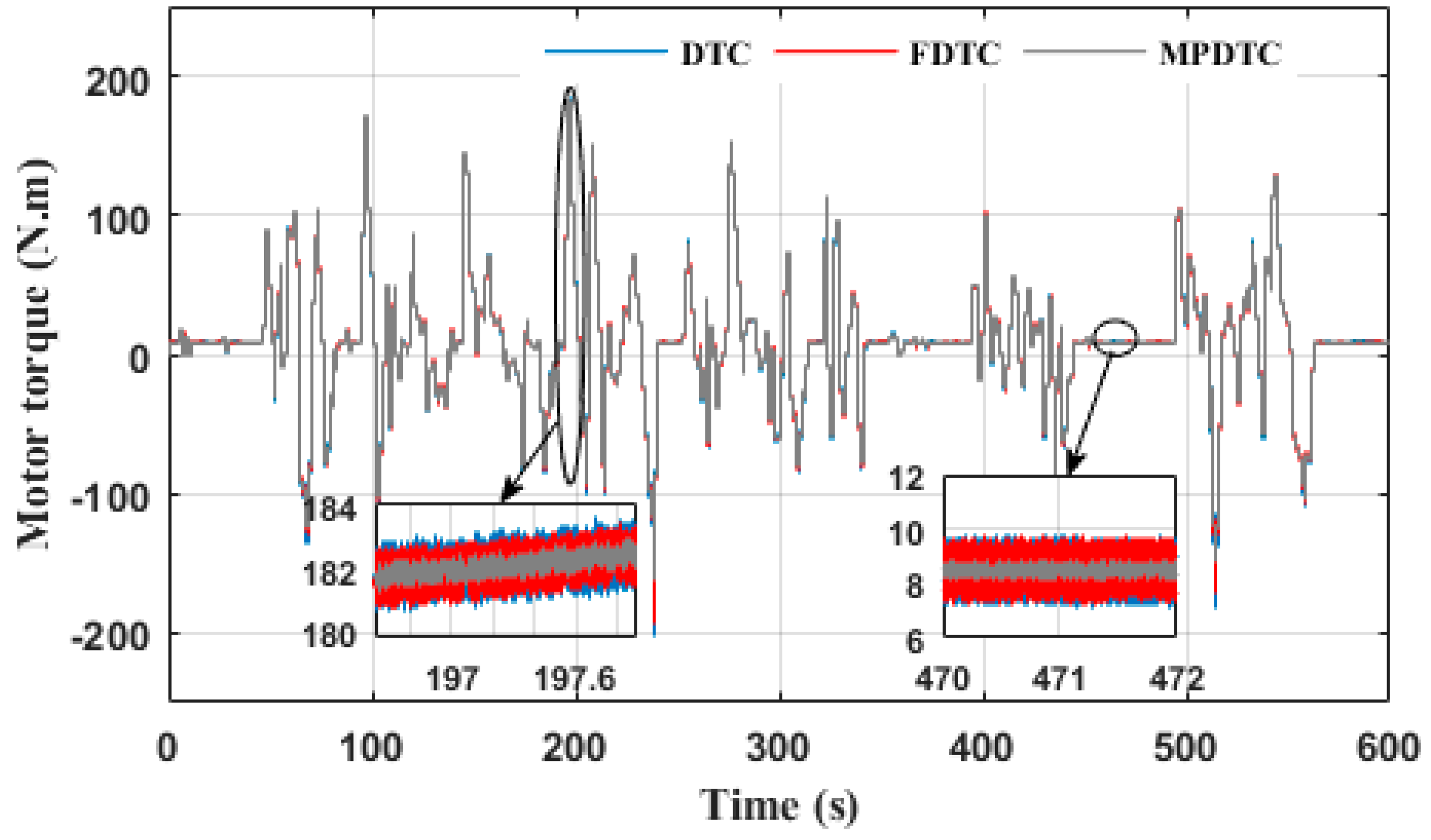
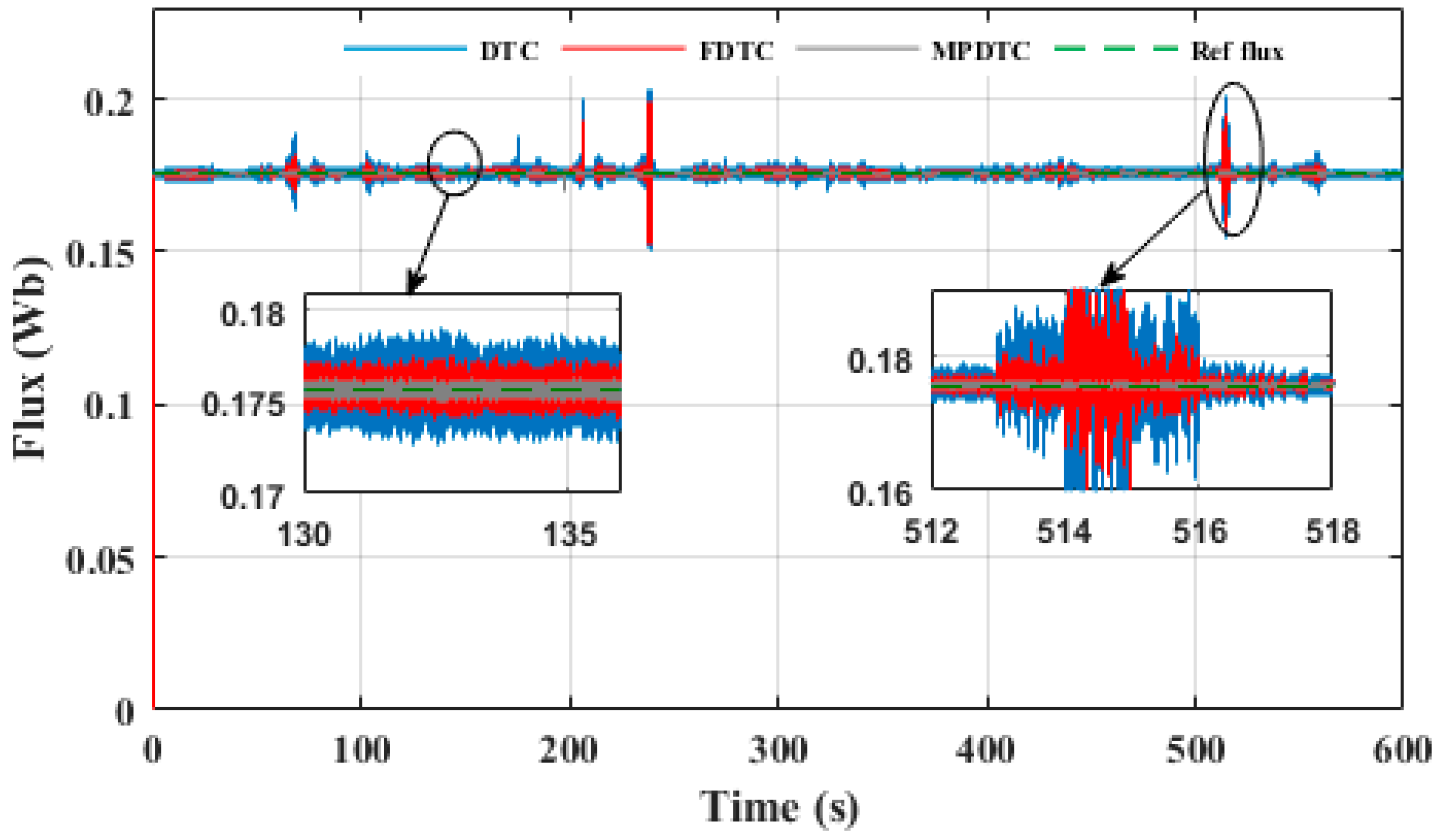
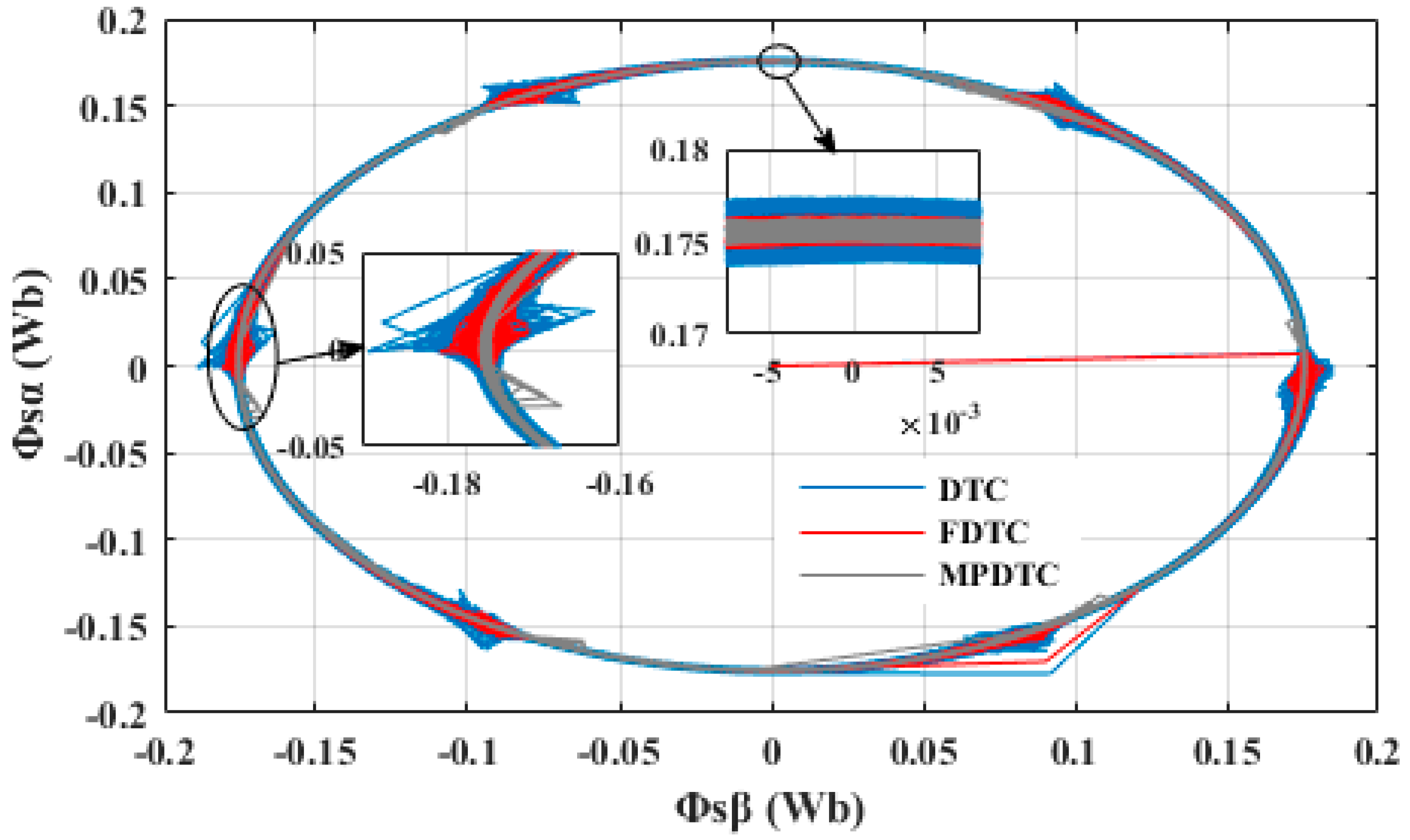
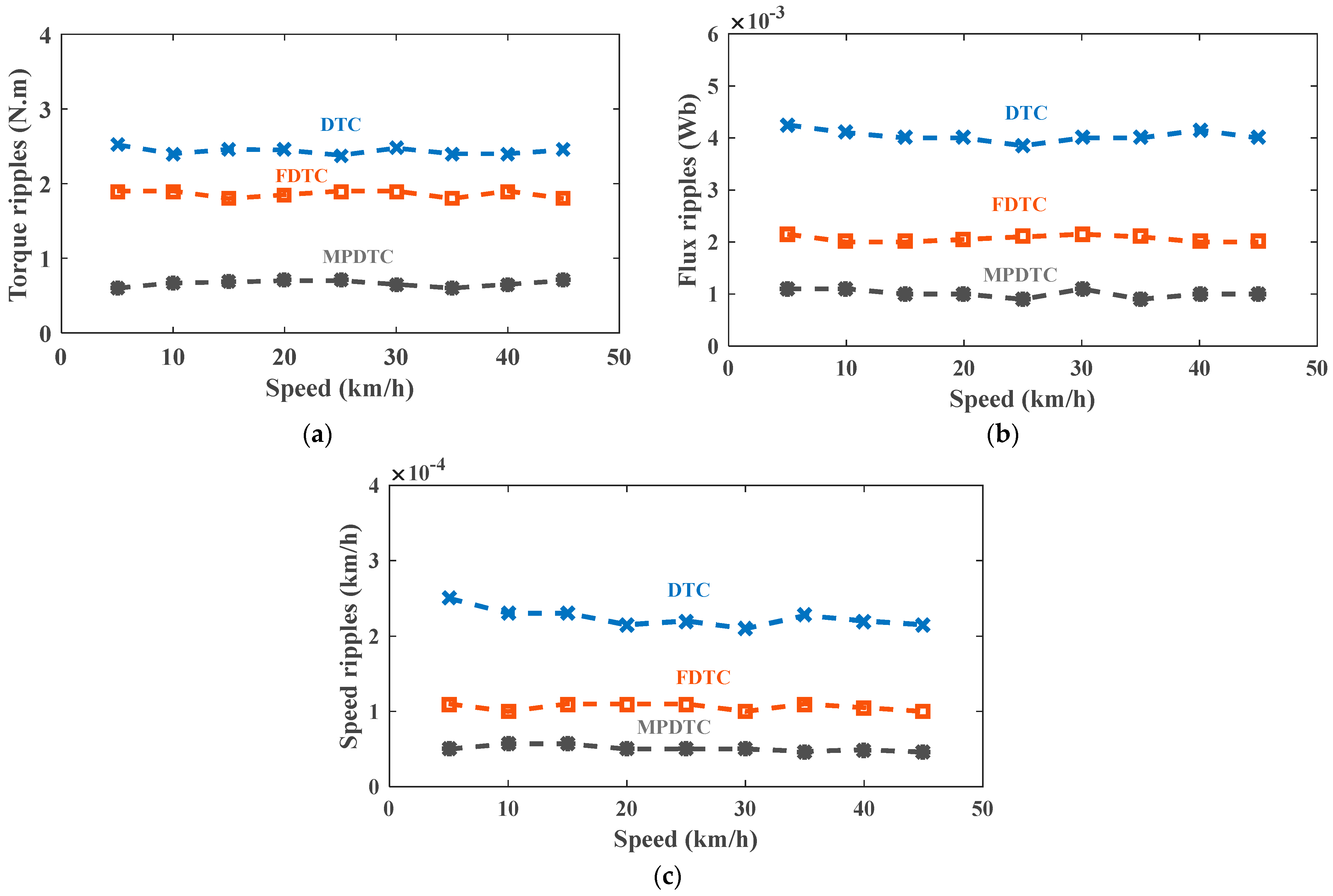
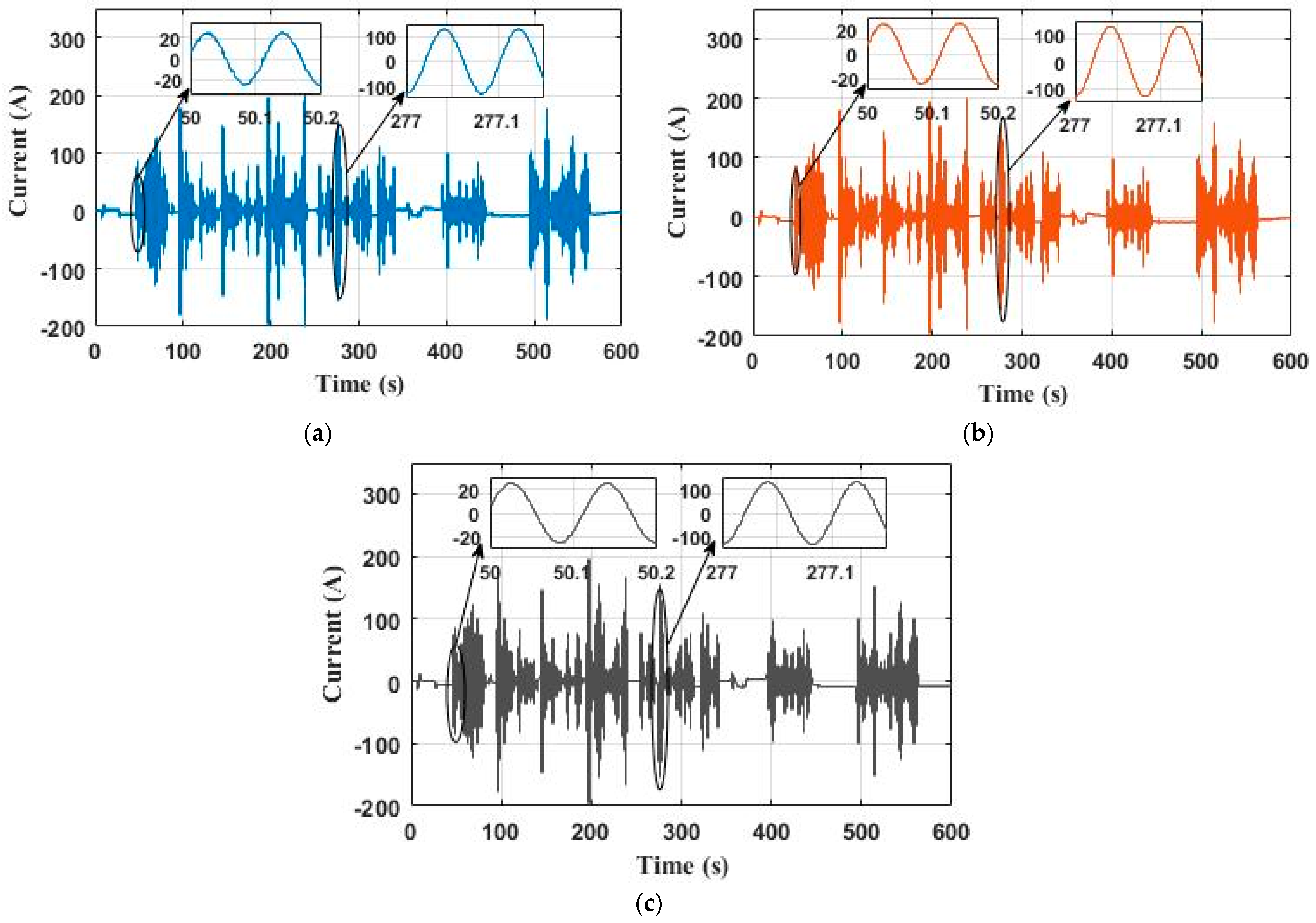
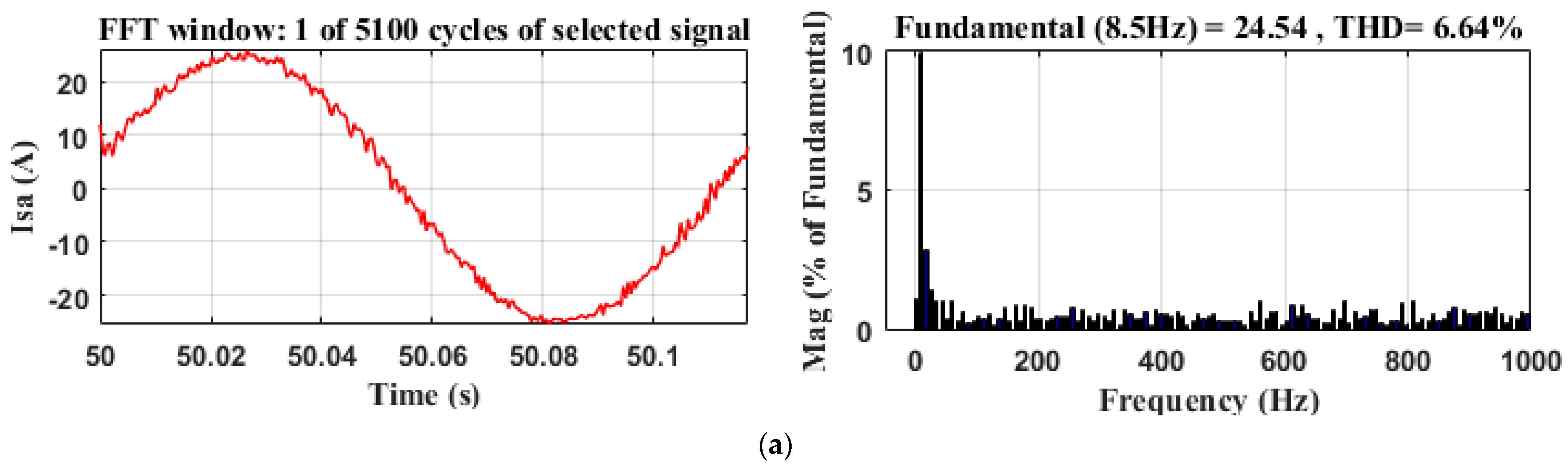
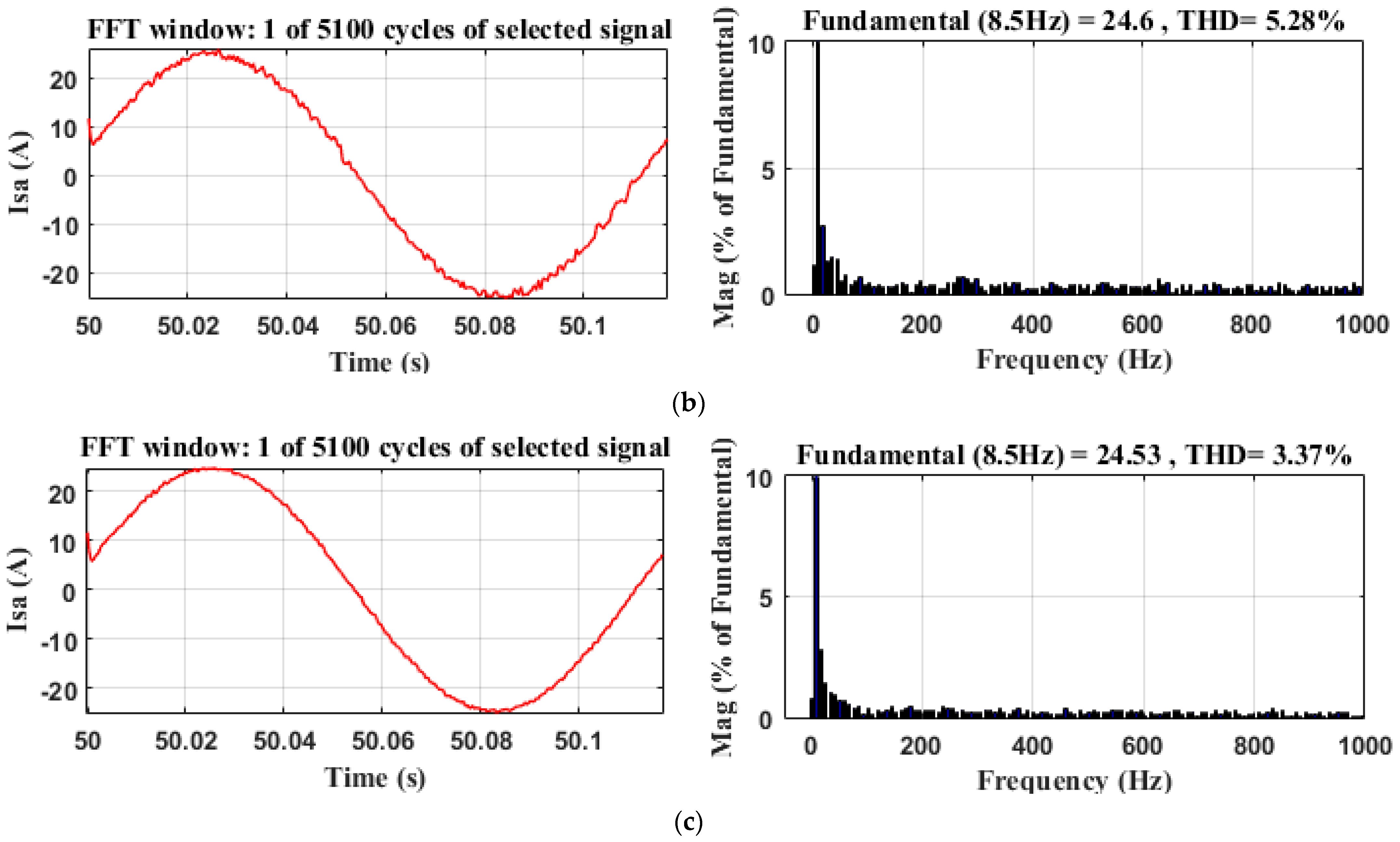
4.1. Comparison between Different Control Techniques
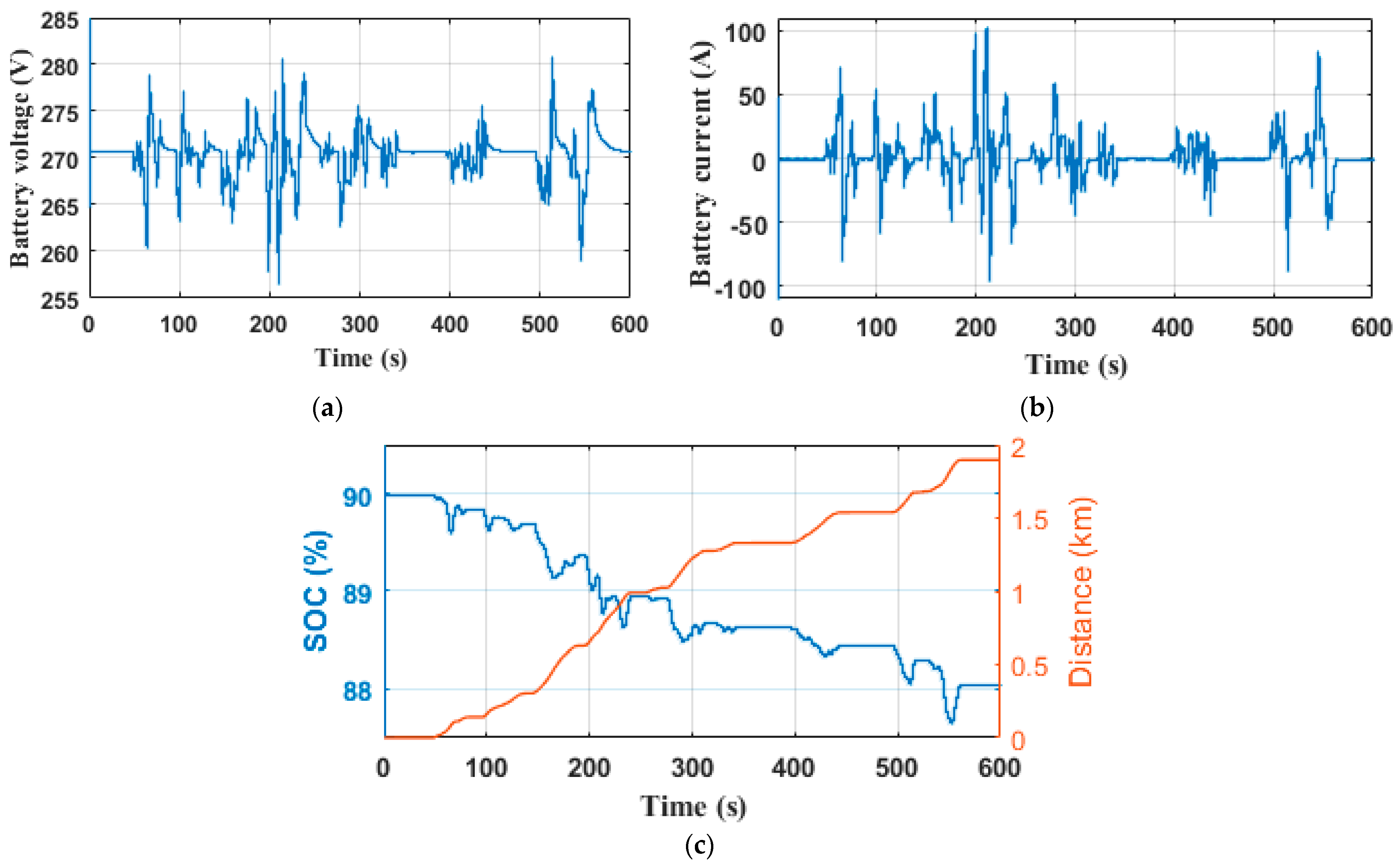
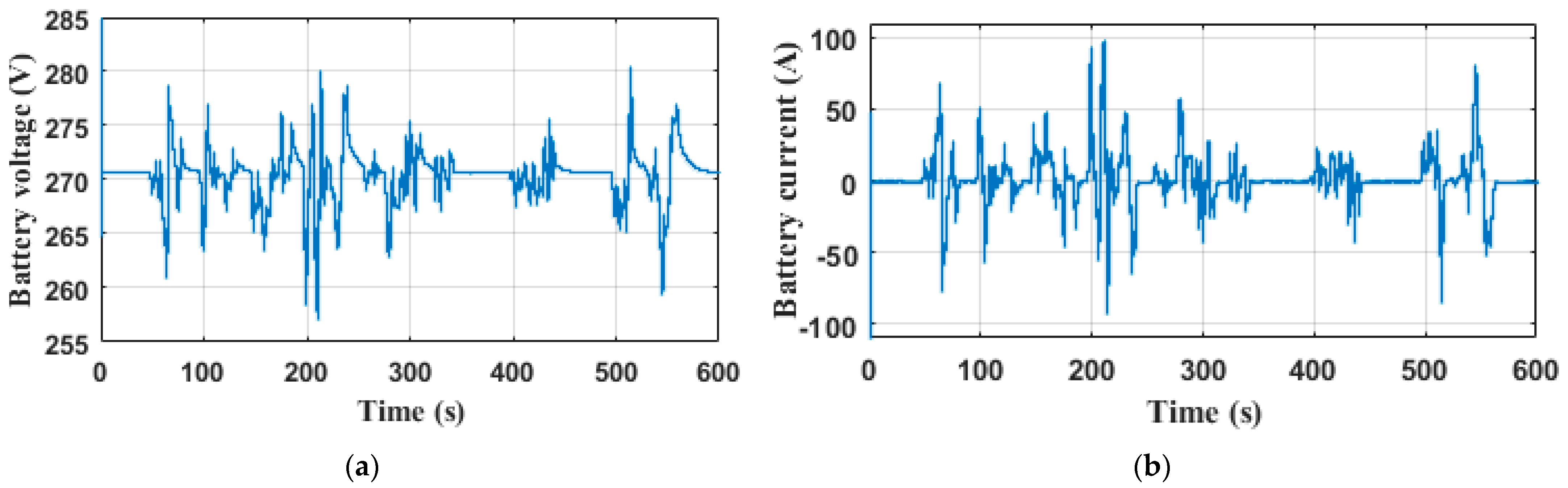
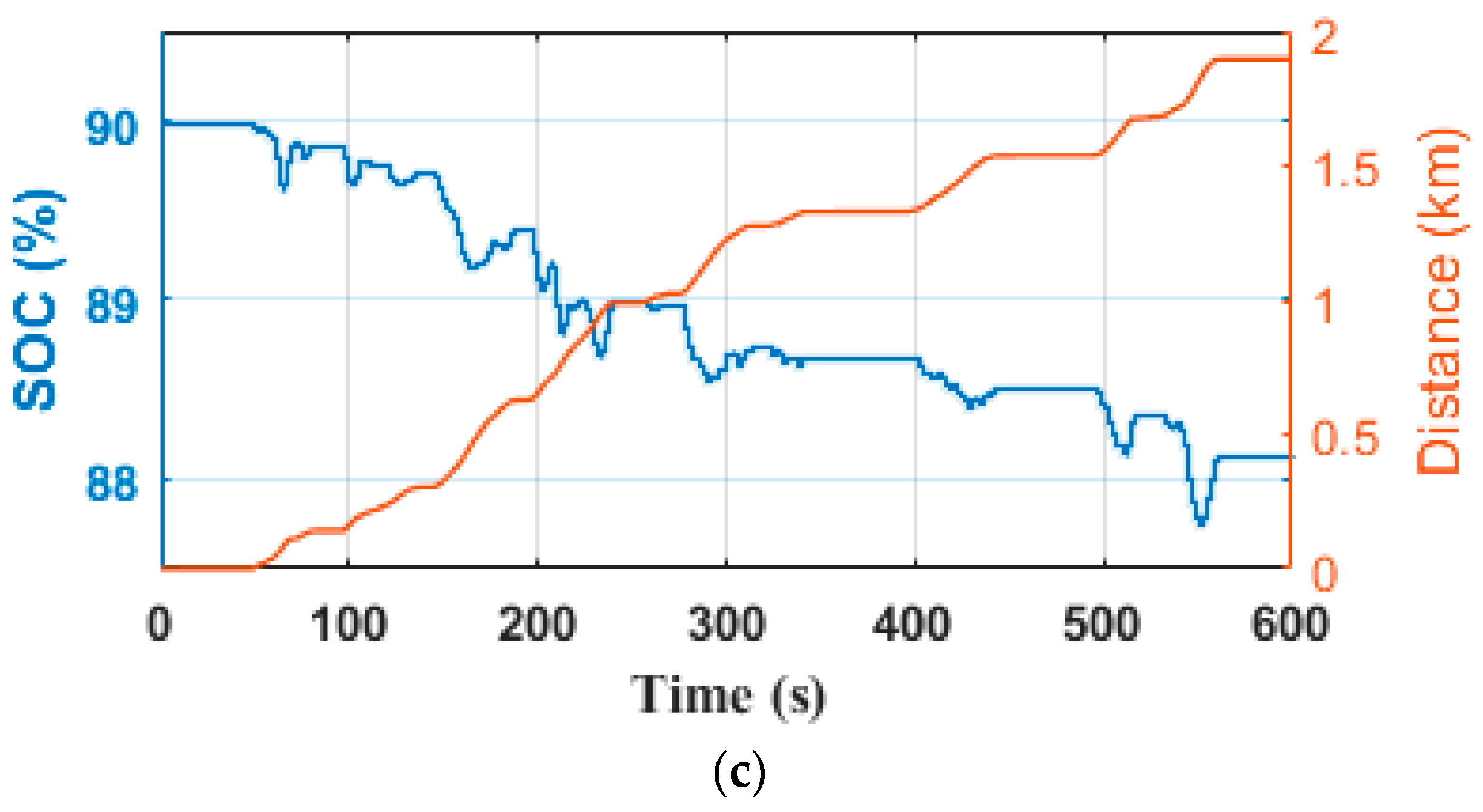
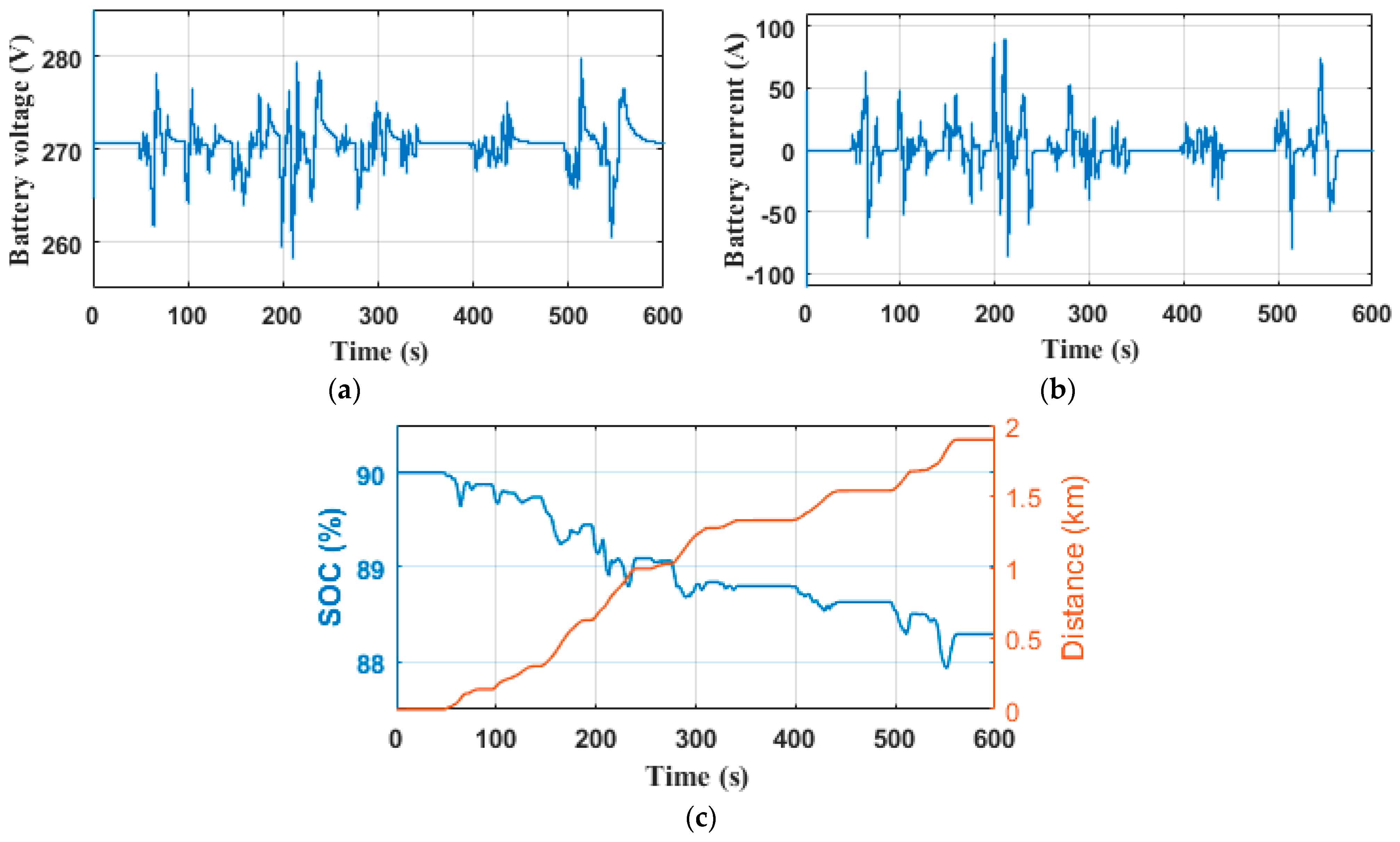
4.2. Dynamic Performance of the Battery for DTC, FDTC and MPDTC
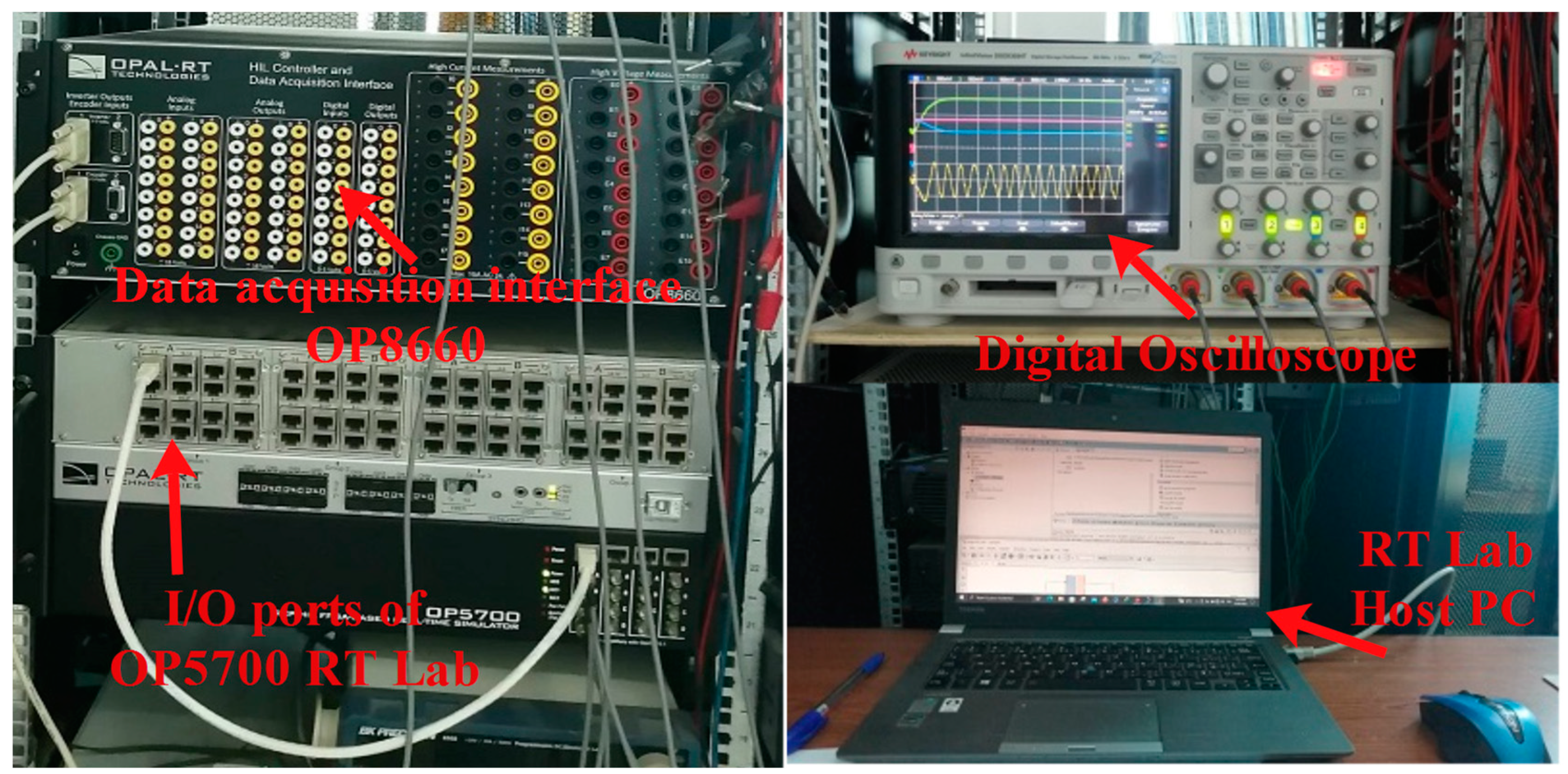
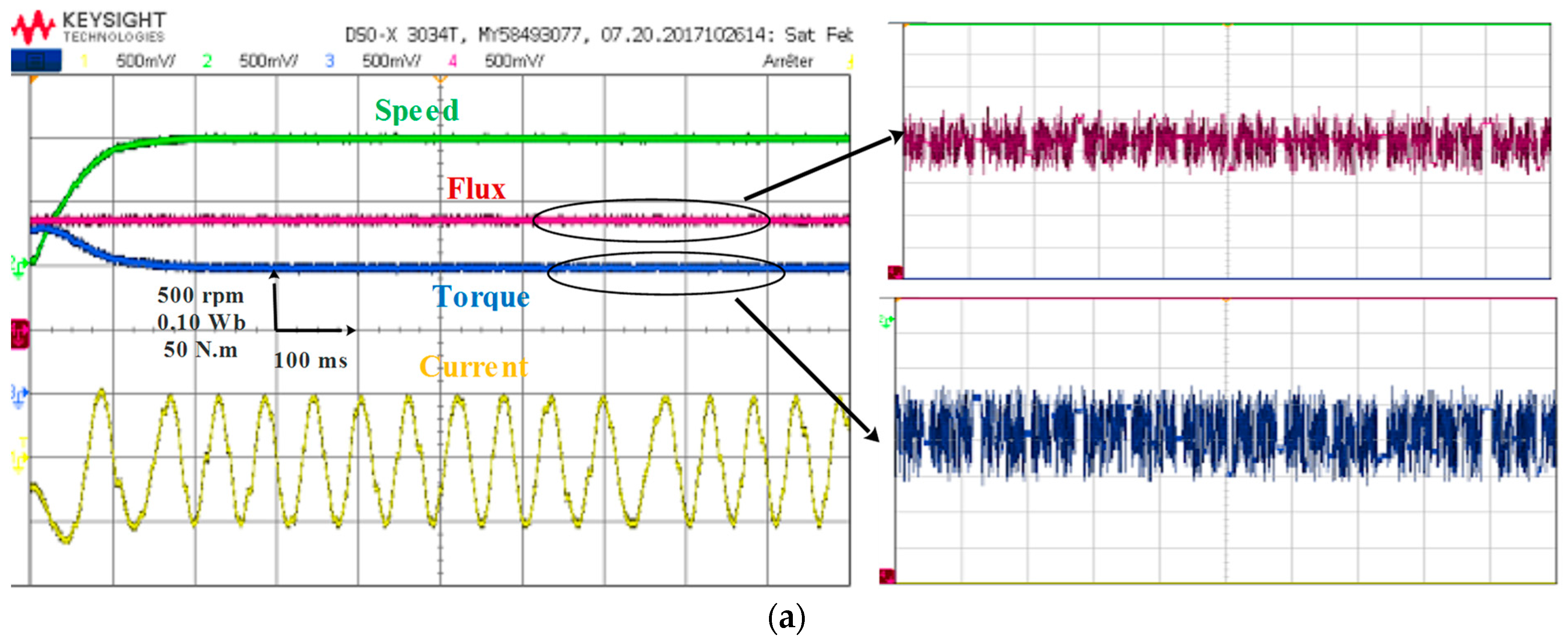
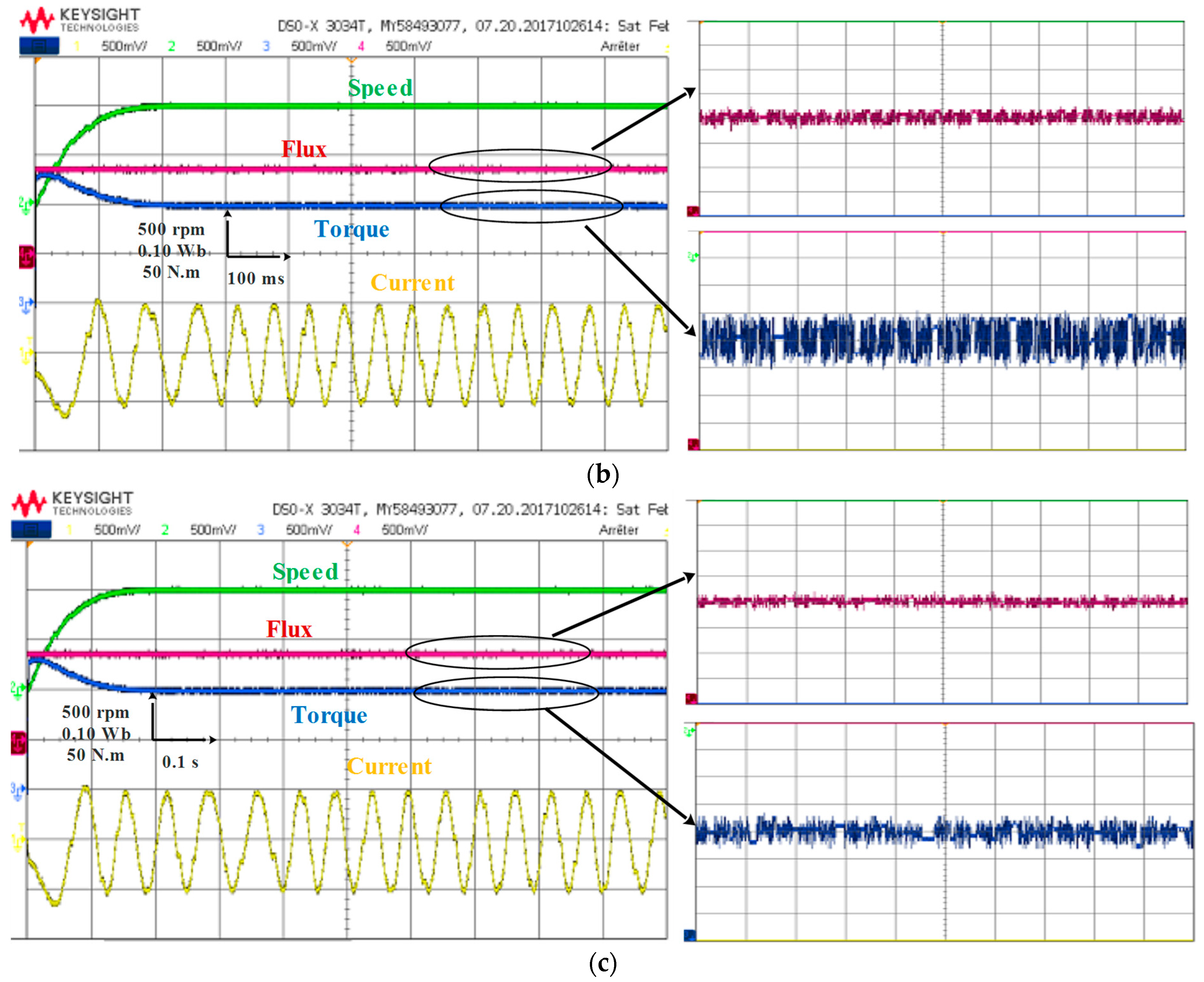
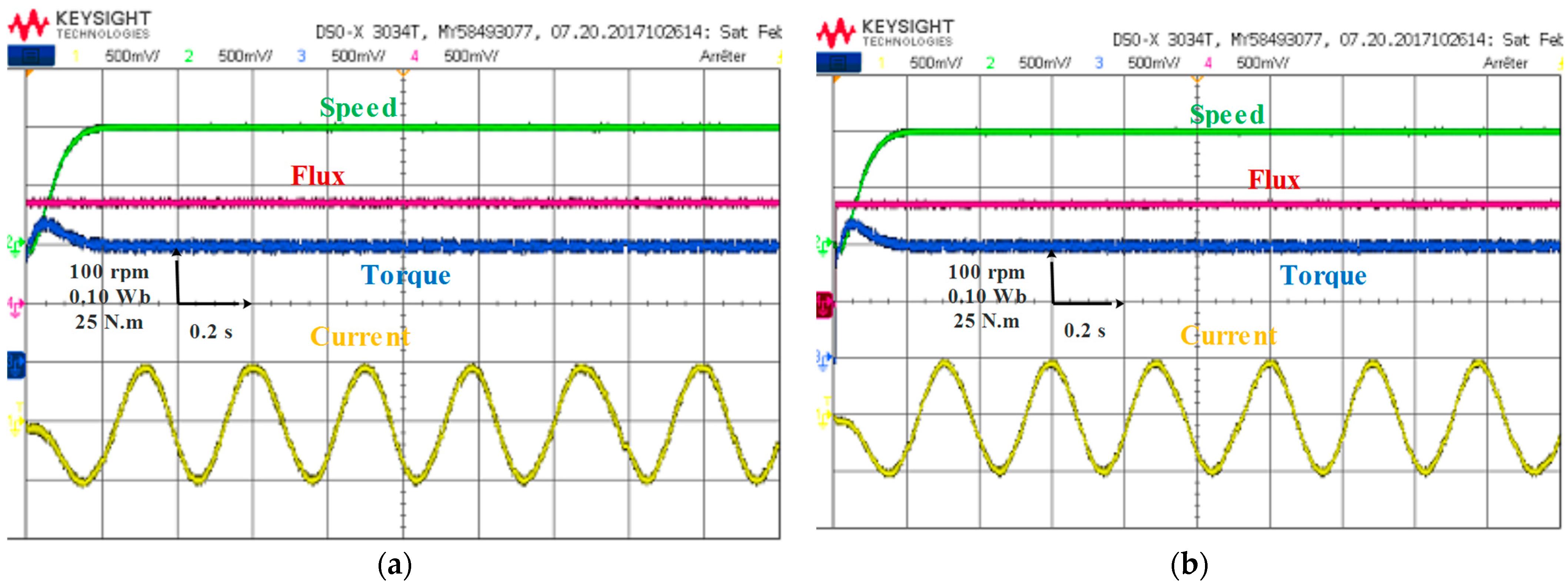
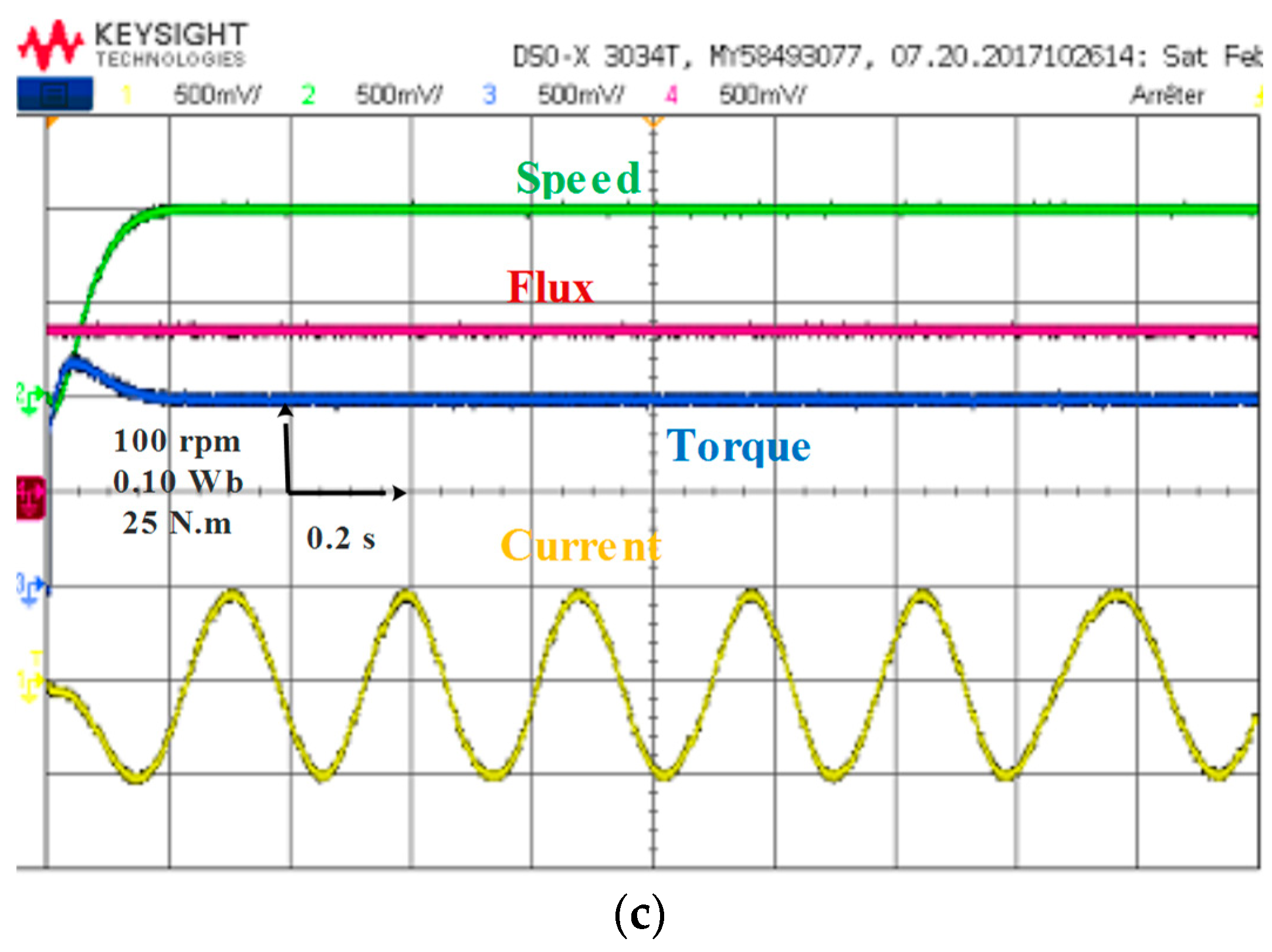
5. Real-Time Platform Using RT-LAB
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pamuła, T.; Pamuła, W. Estimation of the Energy Consumption of Battery Electric Buses for Public Transport Networks Using Real-World Data and Deep Learning. Energies 2020, 13, 2340. [Google Scholar] [CrossRef]
- Andwari, A.M.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A Review of Battery Electric Vehicle Technology and Readiness Levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Makrygiorgou, J.J.; Alexandridis, A.T. Power Electronic Control Design for Stable EV Motor and Battery Operation during a Route. Energies 2019, 12, 1990. [Google Scholar] [CrossRef] [Green Version]
- Pellegrino, G.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of Induction and PM Synchronous Motor Drives for EV Application Including Design Examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef] [Green Version]
- Mokrani, Z.; Rekioua, D.; Mebarki, N.; Rekioua, T.; Bacha, S. Proposed energy management strategy in electric vehicle for recovering power excess produced by fuel cells. Int. J. Hydrog. Energy 2017, 42, 19556–19575. [Google Scholar] [CrossRef]
- Zhang, Z.; Ge, X.; Tian, Z.; Zhang, X.; Tang, Q.; Feng, X. A PWM for Minimum Current Harmonic Distortion in Metro Traction PMSM with Saliency Ratio and Load Angle Constrains. IEEE Trans. Power Electron. 2017, 33, 4498–4511. [Google Scholar] [CrossRef]
- Li, G.; Hu, J.; Li, Y.; Zhu, J. An Improved Model Predictive Direct Torque Control Strategy for Reducing Harmonic Currents and Torque Ripples of Five-Phase Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2018, 66, 5820–5829. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M.; Chau, K.T. Field-Oriented Control and Direct Torque Control for Paralleled VSIs Fed PMSM Drives with Variable Switching Frequencies. IEEE Trans. Power Electron. 2015, 31, 2417–2428. [Google Scholar] [CrossRef]
- Emanuele, G.; Marco, P.; Fabio, C.; Matthias, N.; Francesco, C.; Francesco, G. Detection of Stator Turns Short-Circuit During Sensorless Operation by Means of the Direct Flux Control Technique. In Proceedings of the 2020 AEIT International Annual Conference (AEIT), Catania, Italy, 23–25 September 2020; pp. 1–6. [Google Scholar]
- Abdelli, R.; Rekioua, D.; Rekioua, T. Performances Improvements and Torque Ripple Minimization for VSI Fed Induction Machine with Direct Control Torque. ISA Trans. 2011, 50, 213–219. [Google Scholar] [CrossRef]
- Tazerart, F.; Mokrani, Z.; Rekioua, D.; Rekioua, T. Direct Torque Control Implementation with Losses Minimization of Induction Motor for Electric Vehicle Applications with High Operating Life of the Battery. Int. J. Hydrog. Energy 2015, 40, 13827–13838. [Google Scholar] [CrossRef]
- De Klerk, M.L.; Saha, A.K. Performance Analysis of DTC-SVM in a Complete Traction Motor Control Mechanism for a Battery Electric Vehicle. Heliyon 2022, 8, e09265. [Google Scholar] [CrossRef]
- Ammar, A.; Benakcha, A.; Bourek, A. Closed Loop Torque SVM-DTC Based on Robust Super Twisting Speed Controller for Induction Motor Drive with Efficiency Optimization. Int. J. Hydrog. Energy 2017, 42, 17940–17952. [Google Scholar] [CrossRef]
- Tarusan, S.A.A.; Jidin, A.; Jamil, M.L.M. The optimization of torque ripple reduction by using DTC-multilevel inverter. ISA Trans. 2022, 121, 365–379. [Google Scholar] [CrossRef]
- Oubelaid, A.; Taib, N.; Nikolovski, S.; Alharbi, T.E.A.; Rekioua, T.; Flah, A.; Ghoneim, S.S.M. Intelligent Speed Control and Performance Investigation of a Vector Controlled Electric Vehicle Considering Driving Cycles. Electronics 2022, 11, 1925. [Google Scholar] [CrossRef]
- Oubelaid, A.; Alharbi, H.; Humayd, A.S.B.; Taib, N.; Rekioua, T.; Ghoneim, S.S.M. Fuzzy-Energy-Management-Based Intelligent Direct Torque Control for a Battery—Supercapacitor Electric Vehicle. Sustainability 2022, 14, 8407. [Google Scholar] [CrossRef]
- Kakouche, K.; Guendouz, W.; Rekioua, T.; Mezani, S.; Lubin, T. Application of fuzzy controller to minimize torque and flux ripples of PMSM. In Proceedings of the International Conference on Advanced Electrical Engineering (ICAEE), Algiers, Algeria, 19–21 November 2019. [Google Scholar] [CrossRef]
- Singh, B.; Jain, P.; Mittal, A.P.; Gupta, J.R.P. Torque Ripples Minimization of DTC IPMSM Drive for the EV Propulsion System Using a Neural Network. J. Power Electron. 2008, 8, 23–34. [Google Scholar]
- Nouria, N.; Abdelkader, G.B.G.; Cherif, B. Improved DTC Strategy of an Electric Vehicle with Four In-Wheels Induction Motor Drive 4WDEV Using Fuzzy Logic Control. Int. J. Power Electron. Drive Syst. 2021, 12, 650. [Google Scholar] [CrossRef]
- Ahmed, A.; Akl, M.; Rashad, E.E. A Comparative Dynamic Analysis between Model Predictive Torque Control and Field-Oriented Torque Control of IM Drives for Electric Vehicles. Int. Trans. Electr. Energ. Syst. 2021, 31, e13089. [Google Scholar] [CrossRef]
- Kumar, V.P.K.; Kumar, T.V. Enhanced Direct Torque Control and Predictive Torque Control Strategies of an Open-End Winding Induction Motor Drive to Eliminate Common-Mode Voltage and Weighting Factors. IET Power Electron. 2019, 12, 1986–1997. [Google Scholar] [CrossRef]
- Djerioui, A.; Houari, A.; Machmoum, M.; Ghanes, M. Grey Wolf Optimizer-Based Predictive Torque Control for Electric Buses Applications. Energies 2020, 13, 5013. [Google Scholar] [CrossRef]
- Kakouche, K.; Rekioua, T.; Mezani, S.; Oubelaid, A.; Rekioua, D.; Blazek, V.; Prokop, L.; Misak, S.; Bajaj, M.; Ghoneim, S.S.M. Model Predictive Direct Torque Control and Fuzzy Logic Energy Management for Multi Power Source Electric Vehicles. Sensors 2022, 22, 5669. [Google Scholar] [CrossRef] [PubMed]
- Bouguenna, I.F.; Tahour, A.; Kennel, R.; Abdelrahem, M. Multiple-Vector Model Predictive Control with Fuzzy Logic for PMSM Electric Drive Systems. Energies 2021, 14, 1727. [Google Scholar] [CrossRef]
- Vafaie, M.; Dehkordi, B.; Moallem, P.; Kiyoumarsi, A. Minimizing Torque and Flux Ripples and Improving Dynamic Response of PMSM using a Voltage Vector with Optimal Parameters. IEEE Trans. Ind. Electron. 2015, 63, 3876–3888. [Google Scholar] [CrossRef]
- Zhang, K.; Fan, M.; Yang, Y.; Zhu, Z.; Garcia, C.; Rodriguez, J. Field Enhancing Model Predictive Direct Torque Control of Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2021, 36, 2924–2933. [Google Scholar] [CrossRef]
- Navardi, M.J.; Milimonfared, J.; Talebi, H.A. Torque and Flux Ripples Minimization of Permanent Magnet Synchronous Motor by a Predictive-Based Hybrid Direct Torque Control. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1662–1670. [Google Scholar] [CrossRef]
- Toso, F.; De Soricellis, M.; Bolognani, S. Simple and Robust Model Predictive Control of Permanent Magnet Synchronous Motors with Moving Horizon Estimator for Disturbance Compensation. J. Eng. 2019, 17, 4380–4385. [Google Scholar] [CrossRef]
- Alsofyani, I.; Lee, K. Three-level inverter-fed model predictive torque control of a permanent magnet synchronous motor with discrete space vector modulation and simplified neutral point voltage balancing. J. Power Electron. 2022, 22, 22–30. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Xie, W.; Wang, F.; Dou, M.; Kennel, R.M.; Gerling, D. Deadbeat Model-Predictive Torque Control with Discrete Space-Vector Modulation for PMSM Drives. IEEE Trans. Ind. Electron. 2017, 64, 3537–3547. [Google Scholar] [CrossRef]
- Zhu, H.; Xiao, X.; Li, Y. Torque Ripple Reduction in the Torque Predictive Control Scheme for Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2012, 59, 871–877. [Google Scholar] [CrossRef]
- Oubelaid, A.; Taib, N.; Rekioua, T.; Bajaj, M.; Yadav, A.; Shouran, M.; Kamel, S. Secure Power Management Strategy for Direct Torque Controlled Fuel Cell/Supercapacitor Electric Vehicles. Front. Energy Res. 2022, 10, 971357. [Google Scholar] [CrossRef]
- Mebarki, N.; Rekioua, T.; Mokrani, Z.; Rekioua, D.; Bacha, S. PEM Fuel Cell/Battery Storage System Supplying Electric Vehicle. Int. J. Hydrog. Energy 2016, 41, 20993–21005. [Google Scholar] [CrossRef]
- Mamdouh, M.; Abido, M.A. Efficient Predictive Torque Control for Induction Motor Drive. IEEE Trans. Ind. Electron. 2019, 66, 6757–6767. [Google Scholar] [CrossRef]
- Kamel, O.; Mohand, O.; Toufik, R.; Taib, N. Nonlinear predictive control of wind energy conversion system using DFIG with aerodynamic torque observer. J. Electr. Eng. 2015, 65, 333–341. [Google Scholar] [CrossRef] [Green Version]
- Sandre-Hernandez, O.; Rangel-Magdaleno, J.; Morales-Caporal, R. A Comparison on Finite-Set Model Predictive Torque Control Schemes for PMSMs. IEEE Trans. Power Electron. 2018, 33, 8838–8847. [Google Scholar] [CrossRef]
- Motapon, S.N.; Dessaint, L.A.; Al-Haddad, K. A comparative study of energy management schemes for a fuel-cell hybrid emergency power system of more-electric aircraft. IEEE Trans. Ind. Electron. 2013, 61, 1320–1334. [Google Scholar] [CrossRef]
- Rekioua, T.; Rekioua, D. Direct Torque Control Strategy of Permanent Magnet Synchronous Machines. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003; Volume 2, p. 6. [Google Scholar]
- Metidji, B.; Taib, N.; Baghli, L.; Rekioua, T.; Bacha, S. Low-cost direct torque control algorithm for induction motor without AC phase current sensors. IEEE Trans. Power Electron. 2012, 27, 4132–4139. [Google Scholar] [CrossRef]
- Sudheer, H.; Kodad, S.F.; Sarvesh, B. Improvements in Direct Torque Control of Induction Motor for Wide Range of Speed Operation Using Fuzzy Logic. J. Electr. Syst. Inf. Technol. 2018, 5, 813–828. [Google Scholar] [CrossRef]
- Sahri, Y.; Tamalouzt, S.; Lalouni Belaid, S.; Bacha, S.; Ullah, N.; Ahamdi, A.A.A.; Alzaed, A.N. Advanced Fuzzy 12 DTC Control of Doubly Fed Induction Generator for Optimal Power Extraction in Wind Turbine System under Random Wind Conditions. Sustainability 2021, 13, 11593. [Google Scholar] [CrossRef]
- Ban, F.; Lian, G.; Zhang, J.; Chen, B.; Gu, G. Study on a Novel Predictive Torque Control Strategy Based on the Finite Control Set for PMSM. IEEE Trans. Appl. Supercond. 2019, 29, 3601206. [Google Scholar] [CrossRef]
- Elyazid, A.; Yanis, H.; Koussaila, I.; Kaci, G.; Djamal, A.; Azeddine, H. New Fuzzy Speed Controller for Dual Star Permanent Magnet Synchronous Motor. In Proceedings of the 2021 IEEE 1st International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering MI-STA, Tripoli, Libya, 25–27 May 2021; pp. 69–73. [Google Scholar] [CrossRef]
- Lallouani, H.; Saad, B.; Letfi, B. DTC-SVM Based on Interval Type-2 Fuzzy Logic Controller of Double Stator Induction Machine Fed by Six-Phase Inverter. Int. J. Image Graph. Signal Process. 2019, 11, 48–57. [Google Scholar] [CrossRef] [Green Version]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Vehicle total mass | 1325 | kg |
| Air density () | 1.20 | kg/m² |
| Frontal area () | 2.57 | m² |
| Tire radius (r) | 0.30 | m |
| Drag coefficient () | 0.30 | - |
| Gear ratio (G) | 5.20 | - |
| Voltage Vectors V | Voltage Vectors V | ||
|---|---|---|---|
| (0, 0, 0) | (0, 1, 1) | ||
| (1, 0, 0) | (0, 0, 1) | ||
| (1, 1, 0) | (1, 0, 1) | ||
| (0, 1, 0) | (1, 1, 1) |
| Parameters | Values | Units |
|---|---|---|
| Rated power () | 50 | kW |
| Stator resistance () | 6.5 | mΩ |
| Stator inductance (, ) | 8.35 | mH |
| PM magnet flux () | 0.1757 | Wb |
| Number of pole pairs (p) | 4 | - |
| Motor inertia (J) | 0.089 | kg.m² |
| Viscous damping (f) | 0.005 | N.s/m |
| HTe | HϕS | Sector N | |||||
|---|---|---|---|---|---|---|---|
| N1 | N2 | N3 | N4 | N5 | N6 | ||
| 1 | 1 | V3 | V4 | V5 | V6 | V1 | V2 |
| 0 | V2 | V3 | V4 | V5 | V6 | V1 | |
| 0 | 1 | V7 | V0 | V7 | V0 | V7 | V0 |
| 0 | V0 | V7 | V0 | V7 | V0 | V7 | |
| −1 | 1 | V6 | V1 | V2 | V3 | V4 | V5 |
| 0 | V5 | V6 | V1 | V2 | V3 | V4 | |
| eTe | eϕS | Angle θ | |||||
|---|---|---|---|---|---|---|---|
| θ1 | θ2 | θ3 | θ4 | θ5 | θ6 | ||
| P | P | V2 | V3 | V4 | V5 | V6 | V1 |
| N | V3 | V4 | V5 | V6 | V1 | V2 | |
| Z | P | V7 | V0 | V7 | V0 | V7 | V0 |
| N | V0 | V7 | V0 | V7 | V0 | V7 | |
| N | P | V6 | V1 | V2 | V3 | V4 | V5 |
| N | V5 | V6 | V1 | V2 | V3 | V4 | |
| de | e | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| NB | NB | NB | NB | NB | NM | NS | EZ | |
| NM | NB | NB | NB | NM | NS | EZ | PS | |
| NS | NB | NB | NM | NS | EZ | PS | PM | |
| ZE | NB | NM | NS | EZ | PS | PM | PB | |
| PS | NM | NS | EZ | PS | PM | PB | PB | |
| PM | NS | EZ | PS | V5 | PB | PB | PB | |
| PB | EZ | PS | PM | PB | PB | PB | PB | |
| Performances | DTC | FDTC | MPDTC | Improvement (%) MPDTC Compared to FDTC | Improvement (%) MPDTC Compared to DTC |
|---|---|---|---|---|---|
| Torque ripples (N.m) | 2.40 | 1.90 | 0.65 | 65.78 | 72.92 |
| Flux ripples (Wb) | 0.004 | 0.002 | 0.001 | 50 | 75.00 |
| Speed ripples (km/h) | 0.00022 | 0.00011 | 0.00005 | 50.54 | 77.27 |
| THD (%) | 6.64 | 5.28 | 3.37 | 36.17 | 49.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kakouche, K.; Oubelaid, A.; Mezani, S.; Rekioua, D.; Rekioua, T. Different Control Techniques of Permanent Magnet Synchronous Motor with Fuzzy Logic for Electric Vehicles: Analysis, Modelling, and Comparison. Energies 2023, 16, 3116. https://doi.org/10.3390/en16073116
Kakouche K, Oubelaid A, Mezani S, Rekioua D, Rekioua T. Different Control Techniques of Permanent Magnet Synchronous Motor with Fuzzy Logic for Electric Vehicles: Analysis, Modelling, and Comparison. Energies. 2023; 16(7):3116. https://doi.org/10.3390/en16073116
Chicago/Turabian StyleKakouche, Khoudir, Adel Oubelaid, Smail Mezani, Djamila Rekioua, and Toufik Rekioua. 2023. "Different Control Techniques of Permanent Magnet Synchronous Motor with Fuzzy Logic for Electric Vehicles: Analysis, Modelling, and Comparison" Energies 16, no. 7: 3116. https://doi.org/10.3390/en16073116