
Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning


Abstract
:1. Introduction
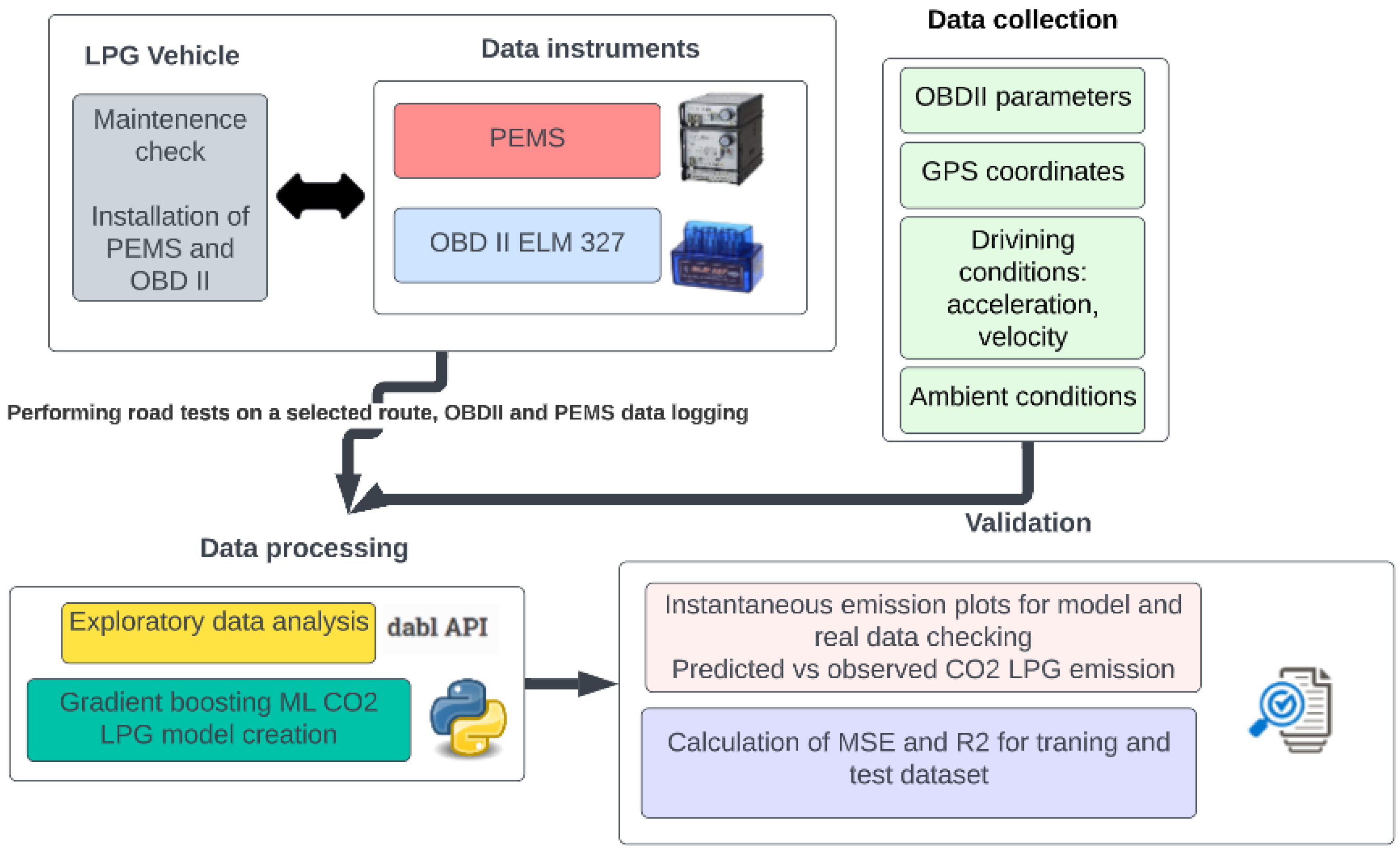
2. Materials and Methods
3. Results
3.1. Exploratory PEMS and OBDII Data Analysis for the LPG-Fuelled Vehicle
- -
- The positive correlation of the CO2 emissions parameter with engine RPM and vehicle speed;
- -
- No correlation or small correlation of CO2 emissions with engine load, acceleration, turbo boost, vacuum gauge, and altitude.
- -
- The highest values of Pearson’s coefficient correlation with CO2 emissions are found for the parameter’s velocity—0.68; engine RPM—0.72; and throttle position—0.63,
- -
- The least correlated parameters with CO2 emissions are acceleration—0.19 and altitude—0.11.
3.2. Creation of CO2 Emission Models for the Vehicle Fuelled with LPG
| Algorithm 1. LPG vehicle emission model in Python; selected codes. |
|
3.3. Validation of a CO2 Emission Model for an LPG Vehicle
4. Discussion
- An advantage of the model is the very good overall predictive ability of the instantaneous CO2 emissions from the LPG vehicle, especially for speeds up to 50 km/h,
- A disadvantage of the model obtained is some erroneous results of instantaneous CO2 emissions for the cold start period of the engine, where we can observe increased fuel consumption, resulting in higher-than-normal CO2 emissions.
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| CO | Carbon monoxide |
| CO2 | Carbon dioxide |
| EDA | Exploratory data analysis |
| EEA | European Environment Agency |
| GHG | Greenhouse gas |
| LCA | Life Cycle Assessment |
| LPG | Liquefied petroleum gas |
| MSE | Mean squared error |
| NOx | Nitrogen oxides |
| OBD | On-board diagnostic |
| PEMS | Portable emission measurement system |
| R2 | Coefficient of determination |
| SVM | Support vector machine |
| THC | Total hydrocarbon |
References
- Panchasara, H.; Samrat, N.H.; Islam, N. Greenhouse gas emissions trends and mitigation measures in australian agriculture sector—A review. Agriculture 2021, 11, 85. [Google Scholar] [CrossRef]
- Mądziel, M.; Campisi, T. Investigation of Vehicular Pollutant Emissions at 4-Arm Intersections for the Improvement of Integrated Actions in the Sustainable Urban Mobility Plans (SUMPs). Sustainability 2023, 15, 1860. [Google Scholar] [CrossRef]
- Hao, H.; Mu, Z.; Jiang, S.; Liu, Z.; Zhao, F. GHG Emissions from the production of lithium-ion batteries for electric vehicles in China. Sustainability 2017, 9, 504. [Google Scholar] [CrossRef] [Green Version]
- Neagu, O.; Teodoru, M.C. The relationship between economic complexity, energy consumption structure and greenhouse gas emission: Heterogeneous panel evidence from the EU countries. Sustainability 2019, 11, 497. [Google Scholar] [CrossRef] [Green Version]
- Fuinhas, J.A.; Koengkan, M.; Leitão, N.C.; Nwani, C.; Uzuner, G.; Dehdar, F.; Relva, S.; Peyerl, D. Effect of battery electric vehicles on greenhouse gas emissions in 29 European Union countries. Sustainability 2021, 13, 13611. [Google Scholar] [CrossRef]
- Jiang, R.; Wu, P.; Wu, C. Driving factors behind energy-related carbon emissions in the US road transport sector: A decomposition analysis. Int. J. Environ. Res. Public Health 2022, 19, 2321. [Google Scholar] [CrossRef] [PubMed]
- Brown, T.; Schäfer, M.; Greiner, M. Sectoral interactions as carbon dioxide emissions approach zero in a highly-renewable European energy system. Energies 2019, 12, 1032. [Google Scholar] [CrossRef] [Green Version]
- Stoilova, S.; Munier, N.; Kendra, M.; Skrúcaný, T. Multi-criteria evaluation of railway network performance in countries of the TEN-T orient–east med corridor. Sustainability 2020, 12, 1482. [Google Scholar] [CrossRef] [Green Version]
- Selleri, T.; Melas, A.D.; Joshi, A.; Manara, D.; Perujo, A.; Suarez-Bertoa, R. An overview of lean exhaust deNOx aftertreatment technologies and NOx emission regulations in the European union. Catalysts 2021, 11, 404. [Google Scholar] [CrossRef]
- Haas, T.; Sander, H. Decarbonizing transport in the European Union: Emission performance standards and the perspectives for a European Green Deal. Sustainability 2020, 12, 8381. [Google Scholar] [CrossRef]
- Veludo, G.; Cunha, M.; Sá, M.M.; Oliveira-Silva, C. Offsetting the Impact of CO2 Emissions Resulting from the Transport of Maiêutica’s Academic Campus Community. Sustainability 2021, 13, 10227. [Google Scholar] [CrossRef]
- Lajunen, A.; Kivekäs, K.; Vepsäläinen, J.; Tammi, K. Influence of increasing electrification of passenger vehicle fleet on carbon dioxide emissions in Finland. Sustainability 2020, 12, 5032. [Google Scholar] [CrossRef]
- Leal Filho, W.; Abubakar, I.R.; Kotter, R.; Grindsted, T.S.; Balogun, A.L.; Salvia, A.L.; Aina, Y.; Wolf, F. Framing electric mobility for urban sustainability in a circular economy context: An overview of the literature. Sustainability 2021, 13, 7786. [Google Scholar] [CrossRef]
- Šarkan, B.; Jaśkiewicz, M.; Kubiak, P.; Tarnapowicz, D.; Loman, M. Exhaust emissions measurement of a vehicle with retrofitted LPG system. Energies 2022, 15, 1184. [Google Scholar] [CrossRef]
- Jaworski, A.; Mądziel, M.; Kuszewski, H.; Lejda, K.; Balawender, K.; Jaremcio, M.; Jakubowski, M.; Woś, P.; Lew, K. The Impact of Driving Resistances on the Emission of Exhaust Pollutants from Vehicles with the Spark Ignition Engine Fuelled by Petrol and LPG; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Hollada, J.; Williams, K.N.; Miele, C.H.; Danz, D.; Harvey, S.A.; Checkley, W. Perceptions of improved biomass and liquefied petroleum gas stoves in Puno, Peru: Implications for promoting sustained and exclusive adoption of clean cooking technologies. Int. J. Environ. Res. Public Health 2017, 14, 182. [Google Scholar] [CrossRef] [Green Version]
- Warguła, Ł.; Kukla, M.; Lijewski, P.; Dobrzyński, M.; Markiewicz, F. Influence of the use of Liquefied Petroleum Gas (LPG) systems in woodchippers powered by small engines on exhaust emissions and operating costs. Energies 2020, 13, 5773. [Google Scholar] [CrossRef]
- Usman, M.; Farooq, M.; Naqvi, M.; Saleem, M.W.; Hussain, J.; Naqvi, S.R.; Jahangir, S.; Usama, H.M.J.; Idrees, S.; Anukam, A. Use of gasoline, LPG and LPG-HHO blend in SI engine: A comparative performance for emission control and sustainable environment. Processes 2020, 8, 74. [Google Scholar] [CrossRef] [Green Version]
- Brzezińska, D. LPG cars in a car park environment—How to make it safe. Int. J. Environ. Res. Public Health 2019, 16, 1062. [Google Scholar] [CrossRef] [Green Version]
- Jena, P.R.; Managi, S.; Majhi, B. Forecasting the CO2 emissions at the global level: A multilayer artificial neural network modelling. Energies 2021, 14, 6336. [Google Scholar] [CrossRef]
- Giechaskiel, B.; Lähde, T.; Clairotte, M.; Suarez-Bertoa, R.; Valverde, V.; Melas, A.D.; Selleri, T.; Bonnel, P. Emissions of Euro 6 Mono-and Bi-Fuel Gas Vehicles. Catalysts 2022, 12, 651. [Google Scholar] [CrossRef]
- Paczuski, M.; Marchwiany, M.; Puławski, R.; Pankowski, A.; Kurpiel, K.; Przedlacki, M. Liquefied Petroleum Gas (LPG) as a Fuel for Internal Combustion Engines; Alternative fuels, technical and environmental conditions; InTechOpen: London, UK, 2016; Volume 13. [Google Scholar]
- Aydin, M.; Irgin, A.; Çelik, M.B. The impact of diesel/LPG dual fuel on performance and emissions in a single cylinder diesel generator. Appl. Sci. 2018, 8, 825. [Google Scholar] [CrossRef] [Green Version]
- Cardone, M.; Marialto, R.; Ianniello, R.; Lazzaro, M.; Di Blasio, G. Spray analysis and combustion assessment of diesel-LPG fuel blends in compression ignition engine. Fuels 2020, 2, 1–15. [Google Scholar] [CrossRef]
- Li, F.; Zhuang, J.; Cheng, X.; Li, M.; Wang, J.; Yan, Z. Investigation and prediction of heavy-duty diesel passenger bus emissions in Hainan using a COPERT model. Atmosphere 2019, 10, 106. [Google Scholar] [CrossRef] [Green Version]
- Mądziel, M.; Campisi, T. Assessment of vehicle emissions at roundabouts: Acomparative study of PEMS data and microscale emission model. Arch. Transp. 2022, 63, 35–51. [Google Scholar] [CrossRef]
- Ali, M.; Kamal, M.D.; Tahir, A.; Atif, S. Fuel consumption monitoring through COPERT model—A case study for urban sustainability. Sustainability 2021, 13, 11614. [Google Scholar] [CrossRef]
- Obaid, M.; Torok, A.; Ortega, J. A comprehensive emissions model combining autonomous vehicles with park and ride and electric vehicle transportation policies. Sustainability 2021, 13, 4653. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, Y.; Pang, Y.; Zhang, B.; Wei, Y.; Wang, M.; Zhu, R. A Deep Learning Micro-Scale Model to Estimate the CO2 Emissions from Light-Duty Diesel Trucks Based on Real-World Driving. Atmosphere 2022, 13, 1466. [Google Scholar] [CrossRef]
- Rodman Oprešnik, S.; Seljak, T.; Vihar, R.; Gerbec, M.; Katrašnik, T. Real-world fuel consumption, fuel cost and exhaust emissions of different bus powertrain technologies. Energies 2018, 11, 2160. [Google Scholar] [CrossRef] [Green Version]
- Lejda, K.; Jaworski, A.; Mądziel, M.; Balawender, K.; Ustrzycki, A.; Savostin-Kosiak, D. Assessment of petrol and natural gas vehicle carbon oxides emissions in the laboratory and on-road tests. Energies 2021, 14, 1631. [Google Scholar] [CrossRef]
- Bezerra, A.; Silva, I.; Guedes, L.A.; Silva, D.; Leitão, G.; Saito, K. Extracting value from industrial alarms and events: A data-driven approach based on exploratory data analysis. Sensors 2019, 19, 2772. [Google Scholar] [CrossRef] [Green Version]
- Taboada, G.L.; Han, L. Exploratory data analysis and data envelopment analysis of urban rail transit. Electronics 2020, 9, 1270. [Google Scholar] [CrossRef]
- Mądziel, M.; Campisi, T. Energy Consumption of Electric Vehicles: Analysis of Selected Parameters Based on Created Database. Energies 2023, 16, 1437. [Google Scholar] [CrossRef]
- Nabipour, M.; Nayyeri, P.; Jabani, H.; Shahab, S.; Mosavi, A. Predicting stock market trends using machine learning and deep learning algorithms via continuous and binary data; a comparative analysis. IEEE Access 2020, 8, 150199–150212. [Google Scholar] [CrossRef]
- Mothilal, R.K.; Sharma, A.; Tan, C. Explaining machine learning classifiers through diverse counterfactual explanations. In Proceedings of the 2020 Conference on Fairness, Accountability, and Transparency, Barcelona, Spain, 27–30 January 2020; pp. 607–617. [Google Scholar]
- Demirbas, A. Fuel properties of hydrogen, liquefied petroleum gas (LPG), and compressed natural gas (CNG) for transportation. Energy Sources 2002, 24, 601–610. [Google Scholar] [CrossRef]
- Saraf, R.R.; Thipse, S.S.; Saxena, P.K. Experimental Performance Analysis of LPG/Gasoline Bi-Fuel Passenger Car PFI Engines (No. 2007-01-2132); SAE Technical Paper; SAE International: Warrendale, PA, USA, 2007. [Google Scholar]
- Tasic, T.; Pogorevc, P.; Brajlih, T. Gasoline and LPG exhaust emissions comparison. Adv. Prod. Eng. Manag. 2011, 6, 87–94. [Google Scholar]
- Cioffi, R.; Travaglioni, M.; Piscitelli, G.; Petrillo, A.; De Felice, F. Artificial intelligence and machine learning applications in smart production: Progress, trends, and directions. Sustainability 2020, 12, 492. [Google Scholar] [CrossRef] [Green Version]
- Lowe, M.; Qin, R.; Mao, X. A review on machine learning, artificial intelligence, and smart technology in water treatment and monitoring. Water 2022, 14, 1384. [Google Scholar] [CrossRef]
- Ak, M.F. A comparative analysis of breast cancer detection and diagnosis using data visualization and machine learning applications. Healthcare 2020, 8, 111. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Pourmohammadi, P.; Poyner, J.D. Mapping the topographic features of mining-related valley fills using mask R-CNN deep learning and digital elevation data. Remote Sens. 2020, 12, 547. [Google Scholar] [CrossRef] [Green Version]
- Li, K.Y.; de Lima, R.S.; Burnside, N.G.; Vahtmäe, E.; Kutser, T.; Sepp, K.; Pinheiro, V.H.C.; Yang, M.-D.; Vain, A.; Sepp, K. Toward automated machine learning-based hyperspectral image analysis in crop yield and biomass estimation. Remote Sens. 2022, 14, 1114. [Google Scholar] [CrossRef]
- Jaworski, A.; Mądziel, M.; Lejda, K. Creating an emission model based on portable emission measurement system for the purpose of a roundabout. Environ. Sci. Pollut. Res. 2019, 26, 21641–21654. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, Z.; Yi, M.; Wang, Y.; Liu, S.; Liu, H.; Zhang, Y.; Zhou, Y. Healthy or not: A way to predict ecosystem health in github. Symmetry 2019, 11, 144. [Google Scholar] [CrossRef] [Green Version]
- Ray, S.; Alshouiliy, K.; Agrawal, D.P. Dimensionality reduction for human activity recognition using google colab. Information 2020, 12, 6. [Google Scholar] [CrossRef]
- Istiaque Ahmed, K.; Tahir, M.; Hadi Habaebi, M.; Lun Lau, S.; Ahad, A. Machine learning for authentication and authorization in iot: Taxonomy, challenges and future research direction. Sensors 2021, 21, 5122. [Google Scholar] [CrossRef]
- Jaworski, A.; Mądziel, M.; Kuszewski, H.; Lejda, K.; Balawender, K.; Jaremcio, M.; Jakubowski, M.; Wojewoda, P.; Lew, K.; Ustrzycki, A. Analysis of Cold Start Emission from Light Duty Vehicles Fueled with Gasoline and LPG for Selected Ambient Temperatures; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Hu, J.; Frey, H.C.; Boroujeni, B.Y. Contribution of Cold Starts to Real-World Trip Emissions for Light-Duty Gasoline Vehicles. Atmosphere 2022, 14, 35. [Google Scholar] [CrossRef]
- Frey, H.C.; Zheng, X.; Hu, J. Variability in measured real-world operational energy use and emission rates of a plug-in hybrid electric vehicle. Energies 2020, 13, 1140. [Google Scholar] [CrossRef] [Green Version]
- Ziółkowski, J.; Oszczypała, M.; Małachowski, J.; Szkutnik-Rogoż, J. Use of artificial neural networks to predict fuel consumption on the basis of technical parameters of vehicles. Energies 2021, 14, 2639. [Google Scholar] [CrossRef]
- Fang, S.; Tang, W.; Peng, Y.; Gong, Y.; Dai, C.; Chai, R.; Liu, K. Remote estimation of vegetation fraction and flower fraction in oilseed rape with unmanned aerial vehicle data. Remote Sens. 2016, 8, 416. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Rahman, S.M.; Vega, R.; Dong, B. A hierarchical approach using machine learning methods in solar photovoltaic energy production forecasting. Energies 2016, 9, 55. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.V.; Pham, B.T.; Vu, B.T.; Prakash, I.; Jha, S.; Shahabi, H.; Shirzadi, A.; Ba, D.N.; Kumar, R.; Chatterjee, J.M.; et al. Hybrid machine learning approaches for landslide susceptibility modeling. Forests 2019, 10, 157. [Google Scholar] [CrossRef] [Green Version]
- Jeanneret, B.; Guille Des Buttes, A.; Pelluet, J.; Keromnes, A.; Pélissier, S.; Le Moyne, L. Optimal Control of a Spark Ignition Engine Including Cold Start Operations for Consumption/Emissions Compromises. Appl. Sci. 2021, 11, 971. [Google Scholar] [CrossRef]
- Han, D.; Jiaqiang, E.; Deng, Y.; Chen, J.; Leng, E.; Liao, G.; Zhao, X.; Feng, C.; Zhang, F. A review of studies using hydrocarbon adsorption material for reducing hydrocarbon emissions from cold start of gasoline engine. Renew. Sustain. Energy Rev. 2021, 135, 110079. [Google Scholar] [CrossRef]
- Zare, A.; Bodisco, T.A.; Jafari, M.; Verma, P.; Yang, L.; Babaie, M.; Rahman, M.M.; Banks, A.; Ristovski, Z.D.; Brown, R.J.; et al. Cold-start NOx emissions: Diesel and waste lubricating oil as a fuel additive. Fuel 2021, 286, 119430. [Google Scholar] [CrossRef]
- Ning, Z.; Chan, T.L. On-road remote sensing of liquefied petroleum gas (LPG) vehicle emissions measurement and emission factors estimation. Atmos. Environ. 2007, 41, 9099–9110. [Google Scholar] [CrossRef]
- Aosaf, M.R.; Wang, Y.; Du, K. Comparison of the emission factors of air pollutants from gasoline, CNG, LPG and diesel fueled vehicles at idle speed. Environ. Pollut. 2022, 305, 119296. [Google Scholar] [CrossRef] [PubMed]
- Lau, J.; Hung, W.T.; Cheung, C.S. Observation of increases in emission from modern vehicles over time in Hong Kong using remote sensing. Environ. Pollut. 2012, 163, 14–23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boureima, F.-S.; Messagie, M.; Matheys, J.; Wynen, V.; Sergeant, N.; Van Mierlo, J.; De Vos, M.; De Caevel, B. Comparative LCA of electric, hybrid, LPG and gasoline cars in Belgian context. World Electr. Veh. J. 2009, 3, 469–476. [Google Scholar] [CrossRef] [Green Version]
- Abukhalil, T.; AlMahafzah, H.; Alksasbeh, M.; Alqaralleh, B.A. Fuel consumption using OBD-II and support vector machine model. J. Robot. 2020, 2020, 50178. [Google Scholar] [CrossRef]
- Mądziel, M.; Jaworski, A.; Kuszewski, H.; Woś, P.; Campisi, T.; Lew, K. The Development of CO2 Instantaneous Emission Model of Full Hybrid Vehicle with the Use of Machine Learning Techniques. Energies 2022, 15, 142. [Google Scholar] [CrossRef]
- Zha, H.; Miao, Y.; Wang, T.; Li, Y.; Zhang, J.; Sun, W.; Feng, Z.; Kusnierek, K. Improving unmanned aerial vehicle remote sensing-based rice nitrogen nutrition index prediction with machine learning. Remote Sens. 2020, 12, 215. [Google Scholar] [CrossRef] [Green Version]
- Quang Tran, D.; Bae, S.H. Proximal policy optimization through a deep reinforcement learning framework for multiple autonomous vehicles at a non-signalized intersection. Appl. Sci. 2020, 10, 5722. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training MSE | Training R2 | Test MSE | Test R2 |
|---|---|---|---|
| 0.55889 | 0.718292 | 0.778043 | 0.612655 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mądziel, M. Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning. Energies 2023, 16, 2754. https://doi.org/10.3390/en16062754
Mądziel M. Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning. Energies. 2023; 16(6):2754. https://doi.org/10.3390/en16062754
Chicago/Turabian StyleMądziel, Maksymilian. 2023. "Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning" Energies 16, no. 6: 2754. https://doi.org/10.3390/en16062754