
A Position-Insensitive Nonlinear Inductive Power Transfer System Employing Saturable Inductor

Abstract
:1. Introduction
2. Theory and Properties of Nonlinear Resonator
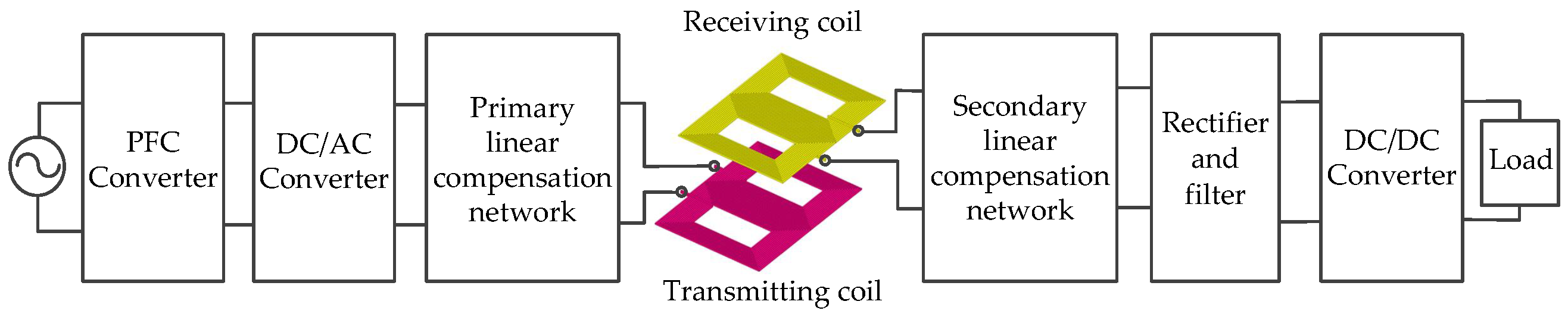
3. Proposed Topology and Operation
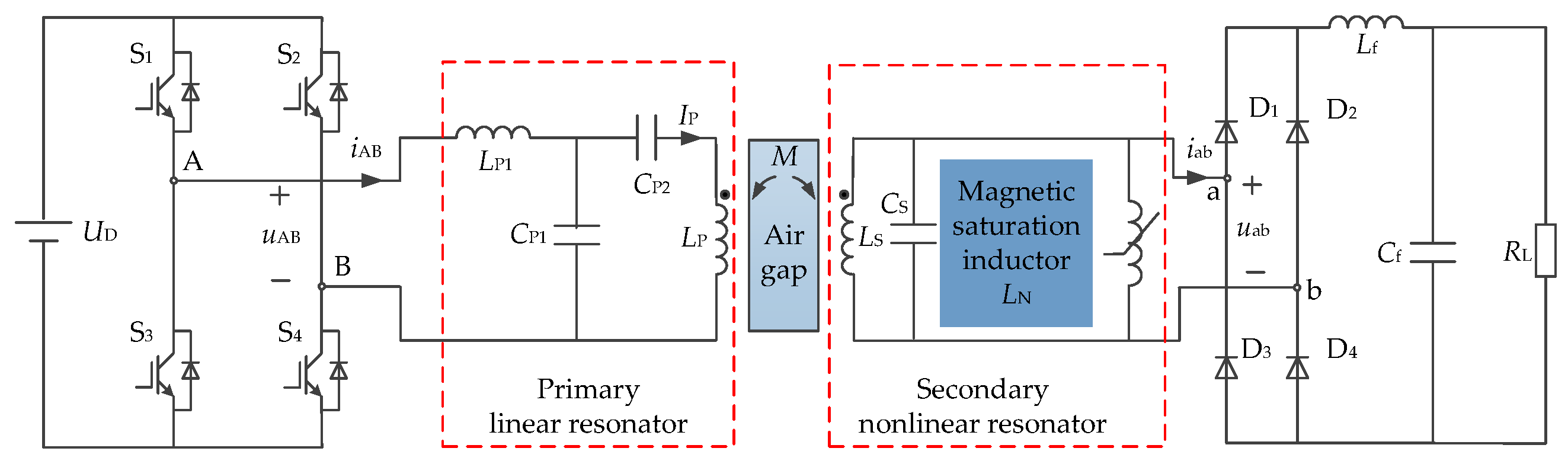
3.1. Nonlinear Topology
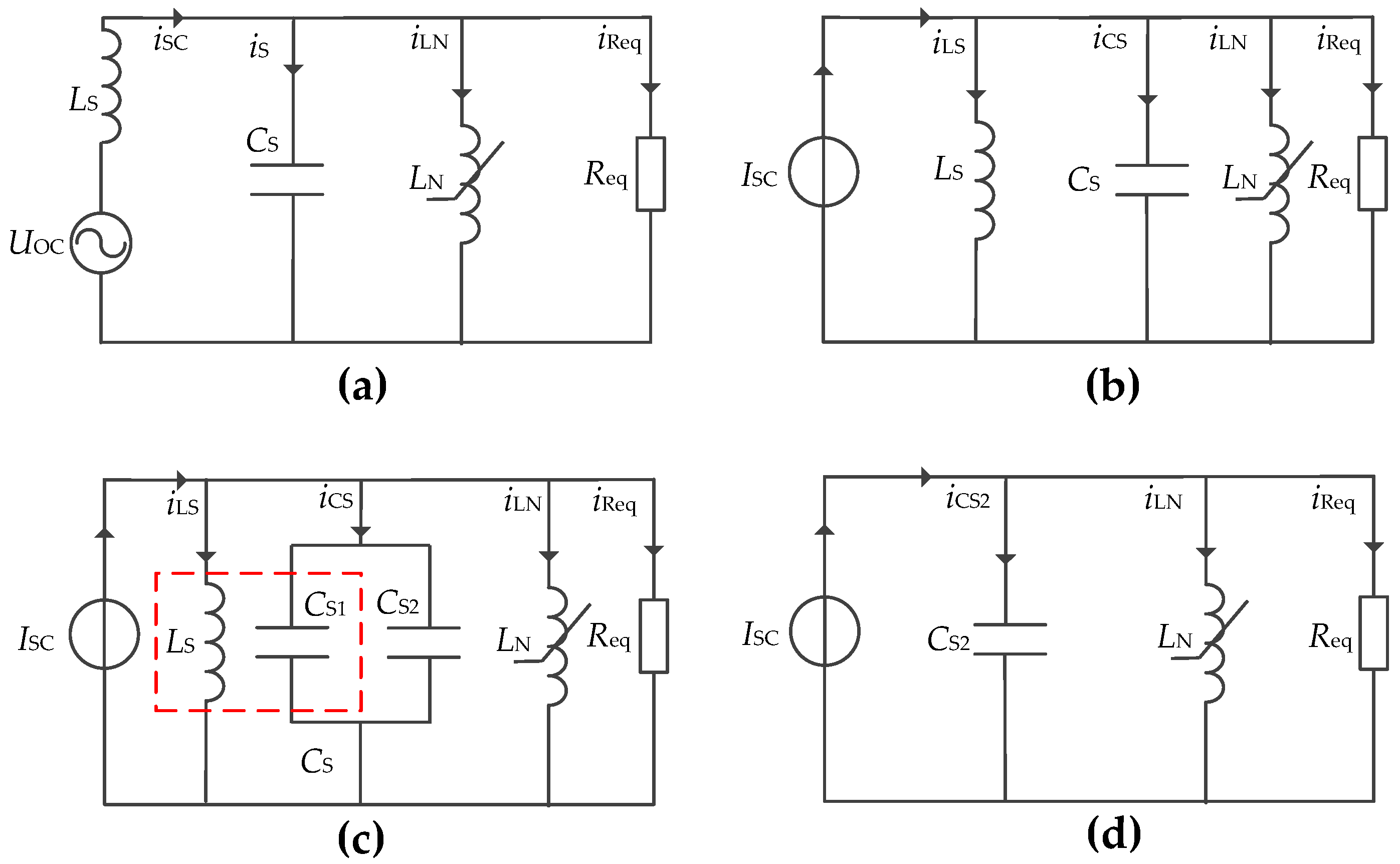
3.2. Saturable Inductor Modeling
3.3. Effect of Saturable Inductor on System Performance
4. Experimental Validation and Further Discussion
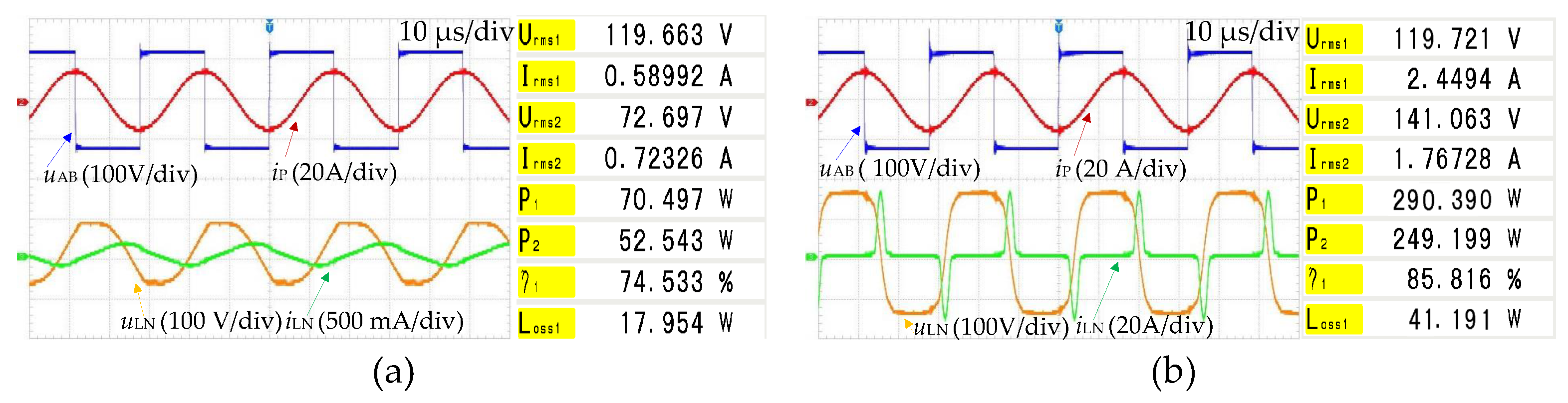
4.1. Waveforms Analysis of the IPT System
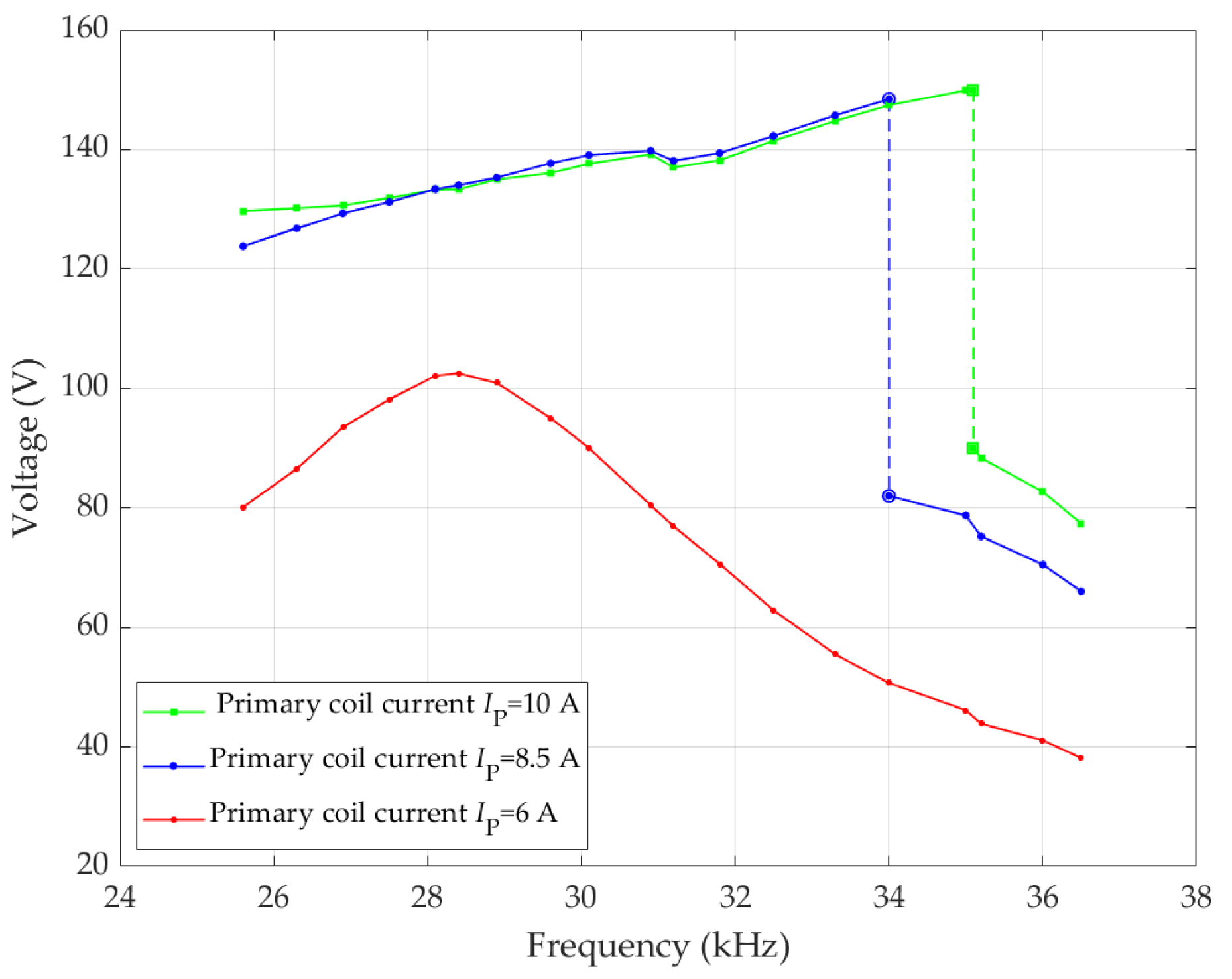
4.2. Hysteresis and Jumping Characteristics
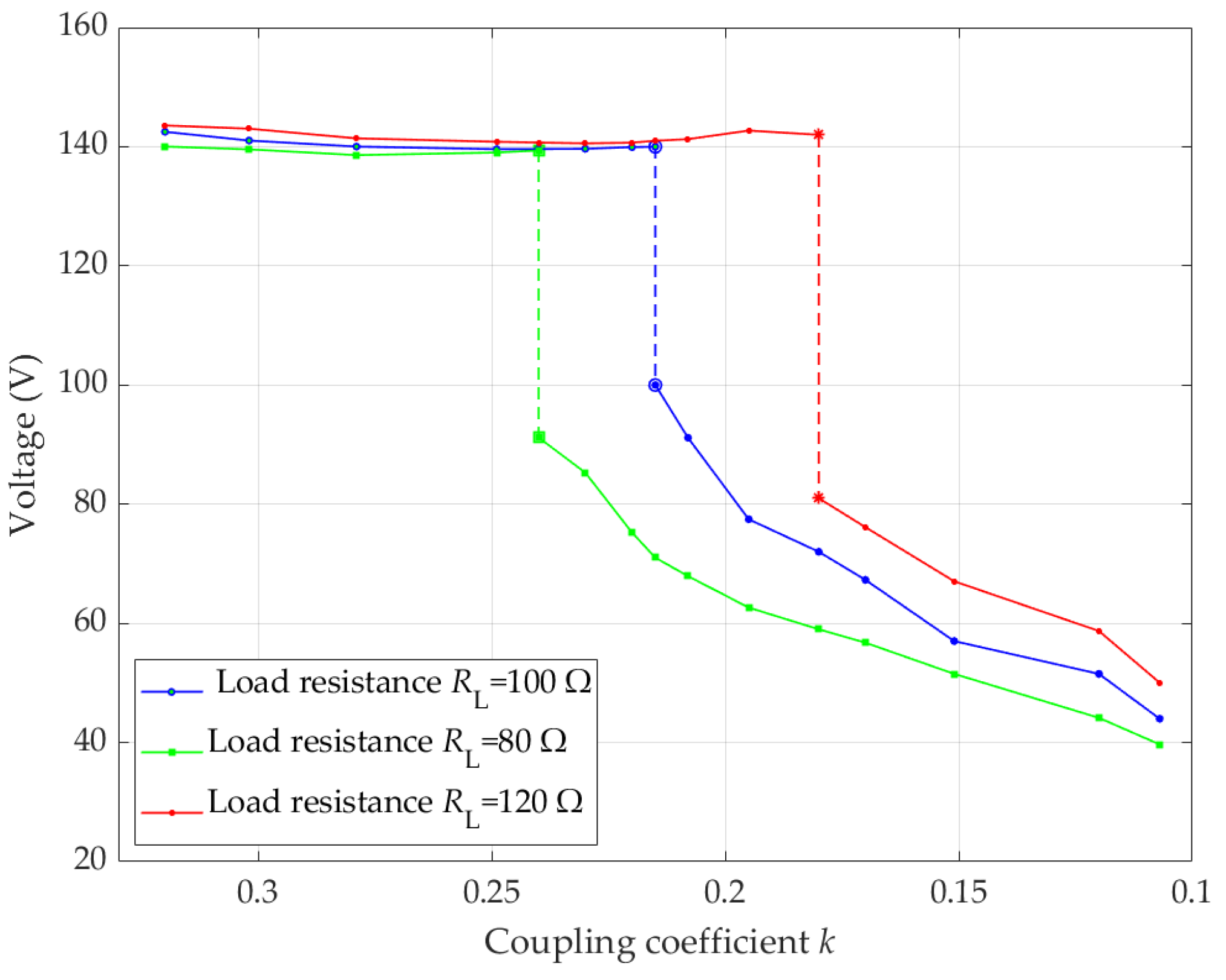
4.3. Position and Load Insensitivity
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Aydin, E.; Aydemir, M.T.; Aksoz, A.; El Baghdadi, M.; Hegazy, O. Inductive Power Transfer for Electric Vehicle Charging Applications: A Comprehensive Review. Energies 2022, 15, 4962. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, Q.; Zhang, X.; Ma, X.; Chen, Z.; Xue, M.; Zhang, P. High-Order Compensation Topology Integration for High-Tolerant Wireless Power Transfer. Energies 2023, 16, 638. [Google Scholar] [CrossRef]
- El Ghanam, E.; Hassan, M.; Osman, A. Design of a High Power, LCC-Compensated, Dynamic, Wireless Electric Vehicle Charging System with Improved Misalignment Tolerance. Energies 2021, 14, 885. [Google Scholar] [CrossRef]
- Budhia, M.; Boys, J.T.; Covic, G.A.; Huang, C.-Y. Development of a Single-Sided Flux Magnetic Coupler for Electric Vehicle IPT Charging Systems. IEEE Trans. Power Electron. 2013, 60, 318–328. [Google Scholar] [CrossRef]
- Zaheer, A.; Covic, G.A.; Kacprzak, D. A Bipolar Pad in a 10-kHz 300-W Distributed IPT System for AGV Applications. IEEE Trans. Ind. Electron. 2014, 61, 3288–3301. [Google Scholar] [CrossRef]
- Kim, S.; Covic, G.A.; Boys, J.T. Tripolar Pad for Inductive Power Transfer Systems for EV Charging. IEEE Trans. Power Electron. 2017, 32, 5045–5057. [Google Scholar] [CrossRef]
- Yang, X.; Yang, J.; Fan, J.; Wang, B.; Li, D. A Magnetic Field Containment Method for an IPT System with Multiple Transmitting Coils Based on Reflective Properties. Electronics 2023, 12, 653. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, H.; Deng, Q.; Hu, W.; Yu, Y.; Lu, X.; Lai, J. Modeling and Decoupled Control of Inductive Power Transfer to Implement Constant Current/Voltage Charging and ZVS Operating for Electric Vehicles. IEEE Access. 2018, 6, 59917–59928. [Google Scholar] [CrossRef]
- Joseph, P.K.; Elangovan, D.; Arunkumar, G. Linear control of wireless charging for electric bicycles. Appl. Energy 2019, 255, 113898. [Google Scholar] [CrossRef]
- Colak, K.; Asa, E.; Bojarski, M.; Czarkowski, D.; Onar, O.C. A Novel Phase-Shift Control of Semibridgeless Active Rectifier for Wireless Power Transfer. IEEE Trans. Power Electron. 2015, 30, 6288–6297. [Google Scholar] [CrossRef]
- Lee, J.H.; Son, W.-J.; Ann, S.; Byun, J.; Lee, B.K. Improved Pulse Density Modulation with a Distribution Algorithm for Semi-Bridgeless Rectifier of Inductive Power Transfer System in Electric Vehicles. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia—ICPE 2019—ECCE Asia, Busan, Republic of Korea, 27–30 May 2019; pp. 1–6. [Google Scholar]
- Diekhans, T.; Doncker, R.W.D. A Dual-Side Controlled Inductive Power Transfer System Optimized for Large Coupling Factor Variations and Partial Load. IEEE Trans. Power Electron. 2015, 30, 6320–6328. [Google Scholar] [CrossRef]
- Zhong, W.; Hui, S.Y.R. Charging Time Control of Wireless Power Transfer Systems Without Using Mutual Coupling Information and Wireless Communication System. IEEE Trans. Ind. Electron. 2017, 64, 228–235. [Google Scholar] [CrossRef]
- Feng, H.; Cai, T.; Duan, S.; Zhao, J.; Zhang, X.; Chen, C. An LCC-Compensated Resonant Converter Optimized for Robust Reaction to Large Coupling Variation in Dynamic Wireless Power Transfer. IEEE Trans. Ind. Electron. 2016, 63, 6591–6601. [Google Scholar] [CrossRef]
- Borage, M.; Tiwari, S.; Kotaiah, S. Analysis and design of an LCL-T resonant converter as a constant-current power supply. IEEE Trans. Ind. Electron. 2005, 52, 1547–1554. [Google Scholar] [CrossRef]
- Zhao, L.; Thrimawithana, D.J.; Madawala, U.K. Hybrid Bidirectional Wireless EV Charging System Tolerant to Pad Misalignment. IEEE Trans. Ind. Electron. 2017, 64, 7079–7086. [Google Scholar] [CrossRef]
- Villa, J.L.; Sallan, J.; Osorio, J.F.S.; Llombart, A. High-Misalignment Tolerant Compensation Topology For ICPT Systems. IEEE Trans. Ind. Electron. 2012, 59, 945–951. [Google Scholar] [CrossRef]
- Aldhaher, S.; Luk, P.C.-K.; Bati, A.; Whidborne, J.F. Wireless Power Transfer Using Class E Inverter With Saturable DC-Feed Inductor. IEEE T. Ind. Appl. 2014, 50, 2710–2718. [Google Scholar] [CrossRef] [Green Version]
- Mai, R.; Chen, Y.; Li, Y.; Zhang, Y.; Cao, G.; He, Z. Inductive Power Transfer for Massive Electric Bicycles Charging Based on Hybrid Topology Switching With a Single Inverter. IEEE Trans. Power Electron. 2017, 32, 5897–5906. [Google Scholar] [CrossRef]
- Wang, X.; Mortazawi, A. Bandwidth Enhancement of RF Resonators Using Duffing Nonlinear Resonance for Wireless Power Applications. IEEE Trans. Microw. Theory Tech. 2016, 64, 3695–3702. [Google Scholar] [CrossRef]
- Abdelatty, O.; Wang, X.; Mortazawi, A. Position-Insensitive Wireless Power Transfer Based on Nonlinear Resonant Circuits. IEEE Trans. Microw. Theory Tech. 2019, 67, 3844–3855. [Google Scholar] [CrossRef]
- Chai, R.; Mortazawi, A. A Position-Insensitive Wireless Power Transfer System Employing Coupled Nonlinear Resonators. IEEE Trans. Microw. Theory Tech. 2021, 69, 1752–1759. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, B.; Liu, G.; Qiu, D. Resonance and Distance Insensitive Wireless Power. Transfer with Parity-Time Symmetric Duffing Resonators. In Proceedings of the 2018 IEEE Wireless Power Transfer Conference (WPTC), Montreal, QC, Canada, 3–7 June 2018; pp. 1–4. [Google Scholar]
- Zhou, J.; Zhang, B.; Xiao, W.; Qiu, D.; Chen, Y. Nonlinear Parity-Time-Symmetric Model for Constant Efficiency Wireless Power Transfer: Application to a Drone-in-Flight Wireless Charging Platform. IEEE Trans. Ind. Electron. 2019, 66, 4097–4107. [Google Scholar] [CrossRef]
- Wu, L.; Zhang, B.; Jiang, Y.; Zhou, J. A Robust Parity-Time-Symmetric WPT System With Extended Constant-Power Range for Cordless Kitchen Appliances. IEEE Trans. Ind. Electron. 2012, 58, 1179–1189. [Google Scholar] [CrossRef]
- Yang, X.; Jiao, C.; Yang, J.; Fan, J.; Li, D.; Wang, B. Bandwidth Enhancement for Wireless Power Transfer System Employing Non-Linear Resonator. IEEE Access 2021, 9, 485–496. [Google Scholar] [CrossRef]
- Chen, D.; Wang, Y.; Chen, X.; Huang, W.; Xie, J. Duffing Nonlinearity Localization via Extension Energy Confinement in an Elastic Mode Semicircular Beams Resonator. IEEE Electron Device Lett. 2019, 40, 314–317. [Google Scholar] [CrossRef]
- Yang, D.; Dong, L.; Shao, G.; Shi, J. The study of nonlinear vibration of Duffing equation under multi-frequency excitation. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 309–312. [Google Scholar]
- Shougat, M.R.E.U.; Ramakrishnan, S. The Hysteresis Phenomenon and Q Factor Enhancement in Nonlinear NEMS Resonators Driven by Lévy Stable Stochastic Processes. In Proceedings of the 2018 IEEE 13th Nanotechnology Materials and Devices Conference (NMDC), Portland, OR, USA, 17–17 October 2018; pp. 1–4. [Google Scholar]
- Kovacic, I.; Brennan, M.J. The Duffing Equation: Nonlinear Oscillators and Their Behaviour; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Chung, S.C.; Huang, S.R.; Huang, J.S. Applications of describing functions to estimate the performance of nonlinear inductance. IEEE P. Sci. Meas. Tech. 2001, 148, 108–114. [Google Scholar] [CrossRef]
- Dayerizadeh, A.; Feng, H.; Lukic, S.M. Dynamic Wireless Charging: Reflexive Field Containment Using Saturable Inductors. IEEE T. Ind. Appl. 2020, 56, 1784–1792. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Note | Values |
|---|---|---|
| Primary-side coil inductance | ||
| Secondary-side coil inductance | ||
| Inductance of primary compensation network | ||
| Shunt capacitance of primary compensation network | ||
| Series capacitance of primary Compensation network | ||
| Secondary Compensation network capacitance | ||
| f | Optimum operating frequency in linear state | |
| Filter inductor | ||
| Filter capacitor |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Yang, J.; Fan, J.; Wang, B.; Li, D. A Position-Insensitive Nonlinear Inductive Power Transfer System Employing Saturable Inductor. Energies 2023, 16, 2430. https://doi.org/10.3390/en16052430
Yang X, Yang J, Fan J, Wang B, Li D. A Position-Insensitive Nonlinear Inductive Power Transfer System Employing Saturable Inductor. Energies. 2023; 16(5):2430. https://doi.org/10.3390/en16052430
Chicago/Turabian StyleYang, Xu, Junfeng Yang, Jing Fan, Bao Wang, and Dingzhen Li. 2023. "A Position-Insensitive Nonlinear Inductive Power Transfer System Employing Saturable Inductor" Energies 16, no. 5: 2430. https://doi.org/10.3390/en16052430