
A Hierarchical Cooperative Frequency Regulation Control Strategy of Wind-Storage-Load in a Microgrid Based on Model Prediction
Abstract
:1. Introduction
- (1)
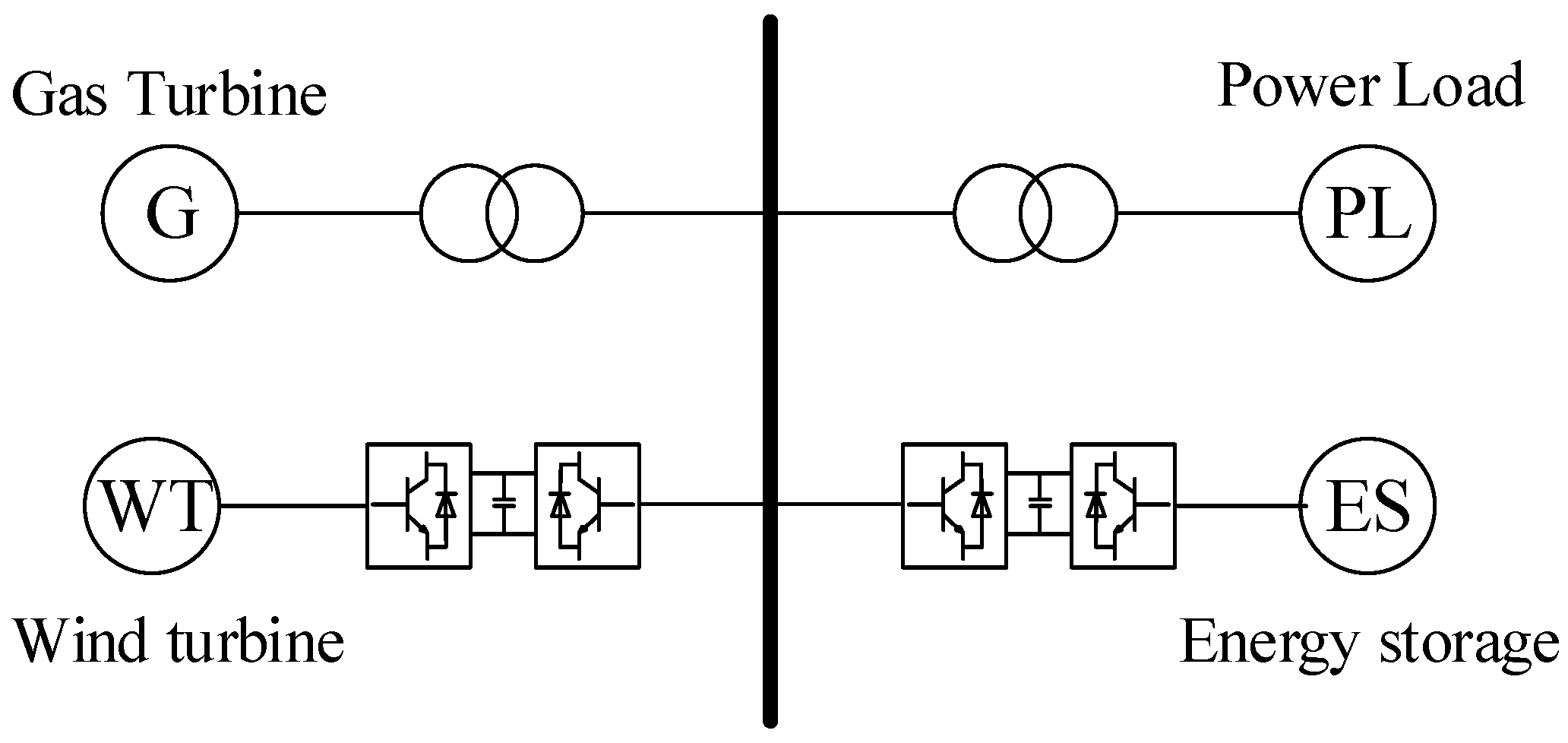
- The hierarchical cooperative frequency regulation architecture of wind-storage-load is constructed based on the operation characteristics of resources in a microgrid.
- (2)
- The calculation method of the system frequency response characteristic index is proposed based on the frequency regulation control models of wind power, energy storage and controllable load.
- (3)
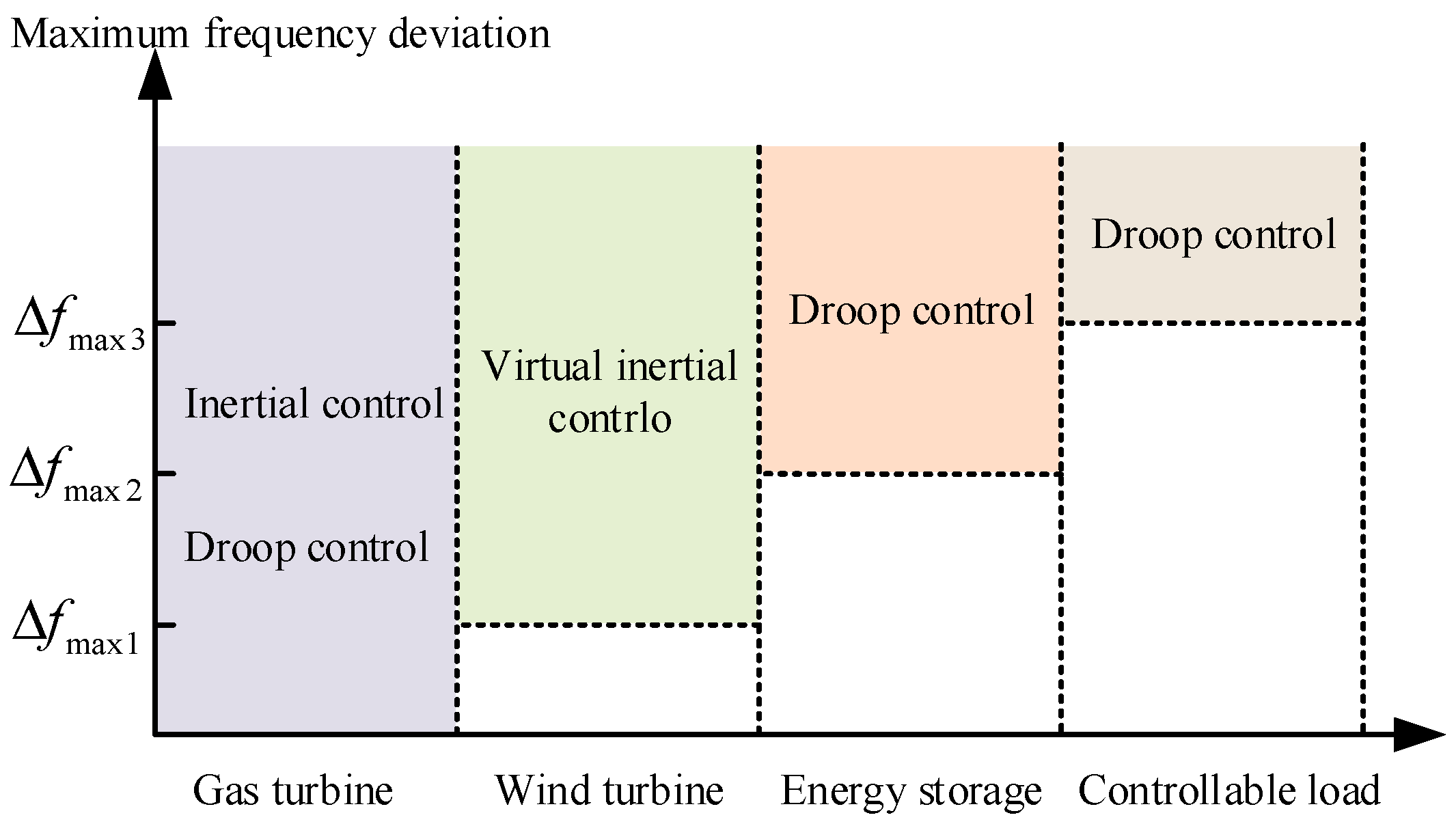
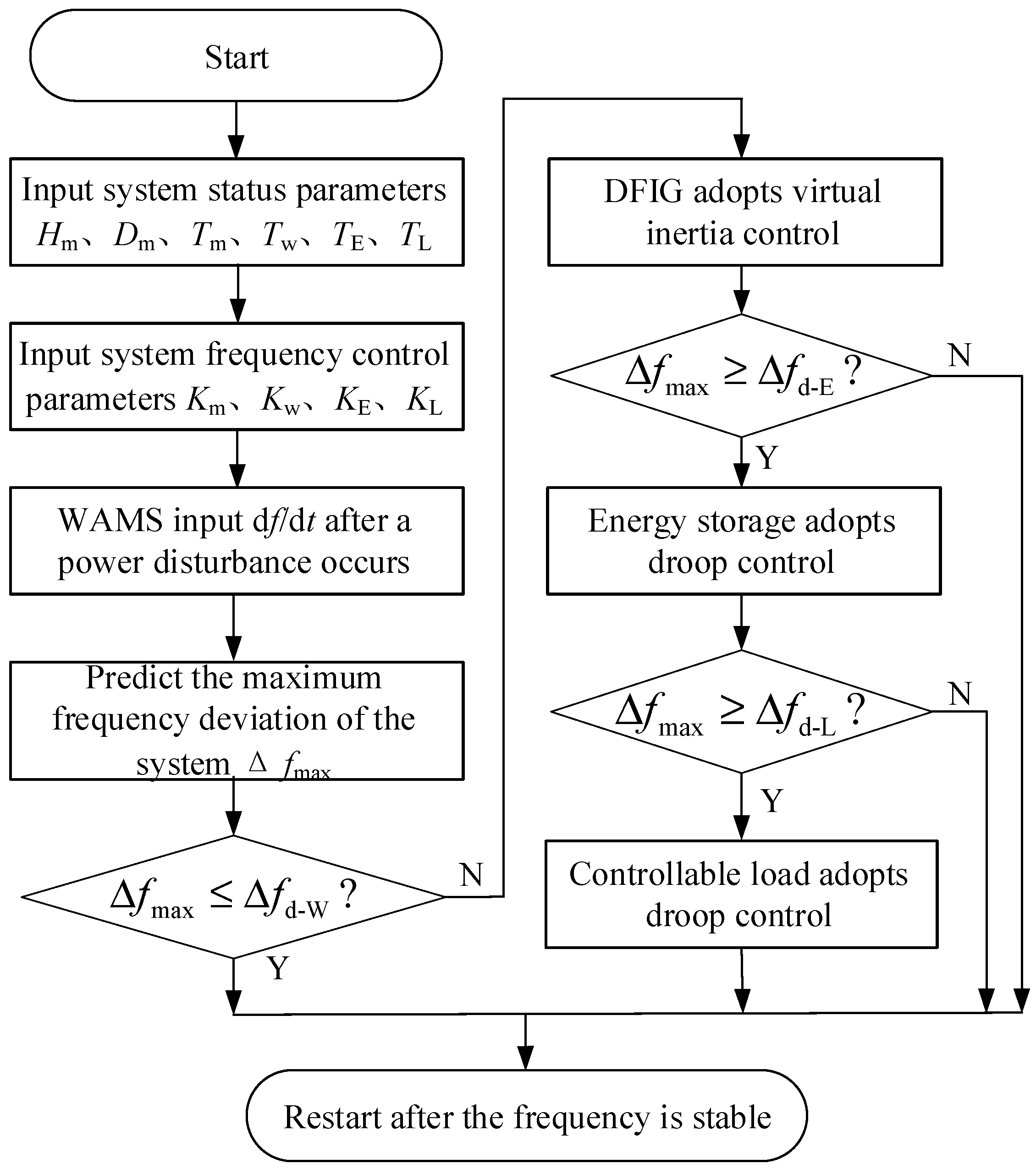
- Taking the maximum frequency deviation as the stratification index, a hierarchical cooperative frequency regulation control strategy based on model prediction is proposed.
- (4)
- A power compensation strategy for connecting the wind turbine frequency support is proposed for the wind turbine speed recovery stage.
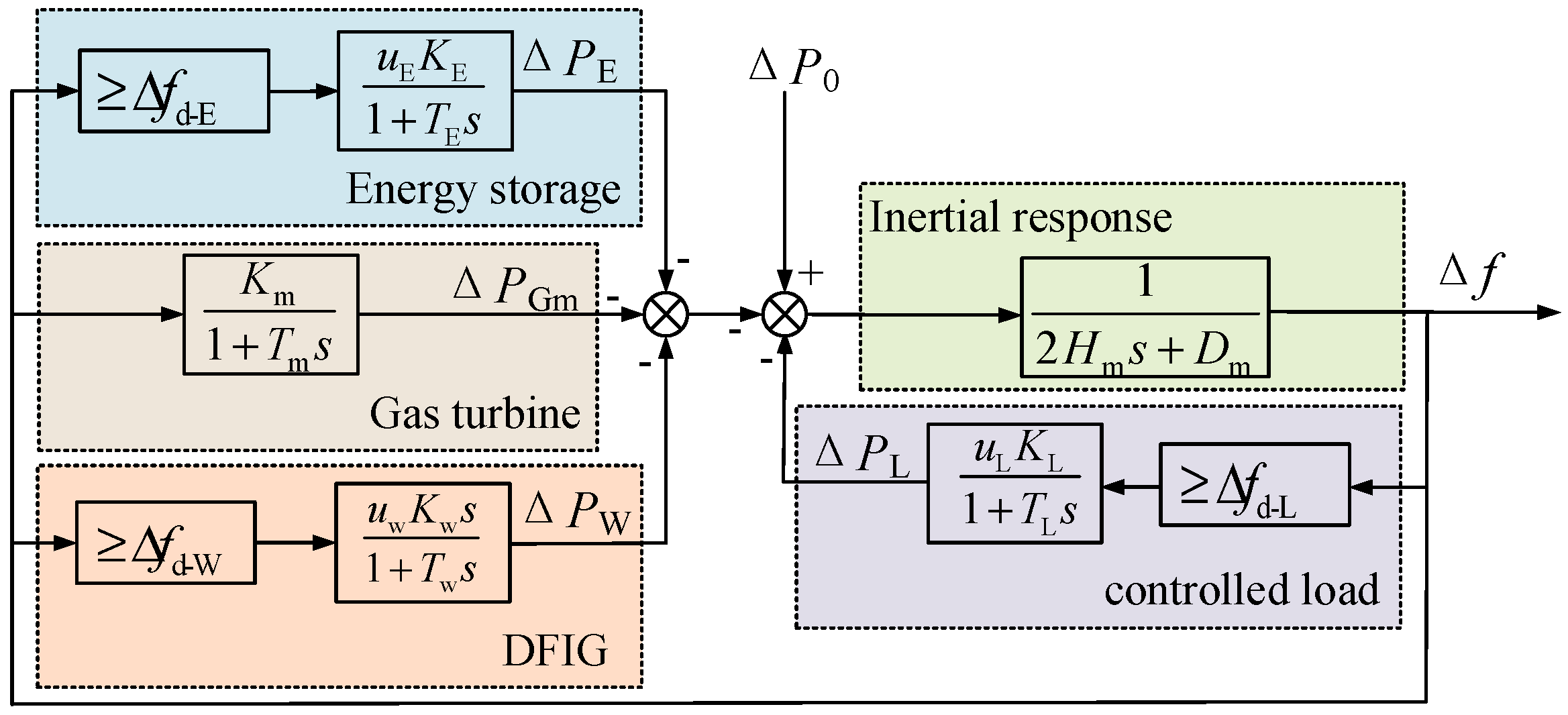
2. Hierarchical Cooperative Frequency Regulation Structure of Wind-Storage-Load
3. Frequency Regulation Control Model of Wind-Storage-Load
3.1. Gas Turbine Frequency Regulation Control Model
3.1.1. Inertial Response Model
3.1.2. Primary Frequency Regulation Model
3.2. DFIG Frequency Regulation Control Model
3.2.1. Virtual Inertial Control
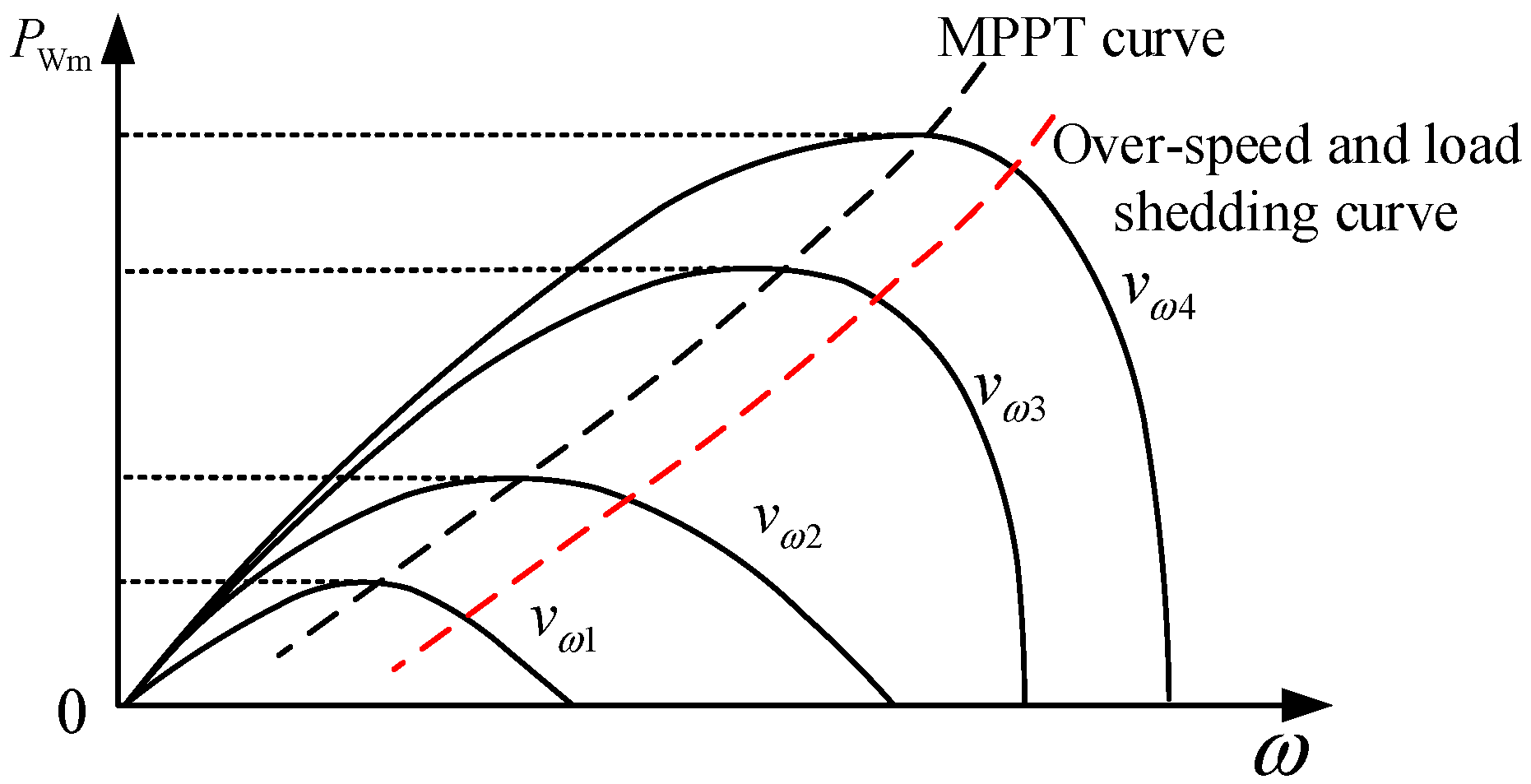
3.2.2. Over-Speed and Load Shedding Control
3.3. Energy Storage Frequency Regulation Control Model
3.4. Controllable Load Frequency Regulation Model
4. Hierarchical Cooperative Control Strategy Based on Model Prediction
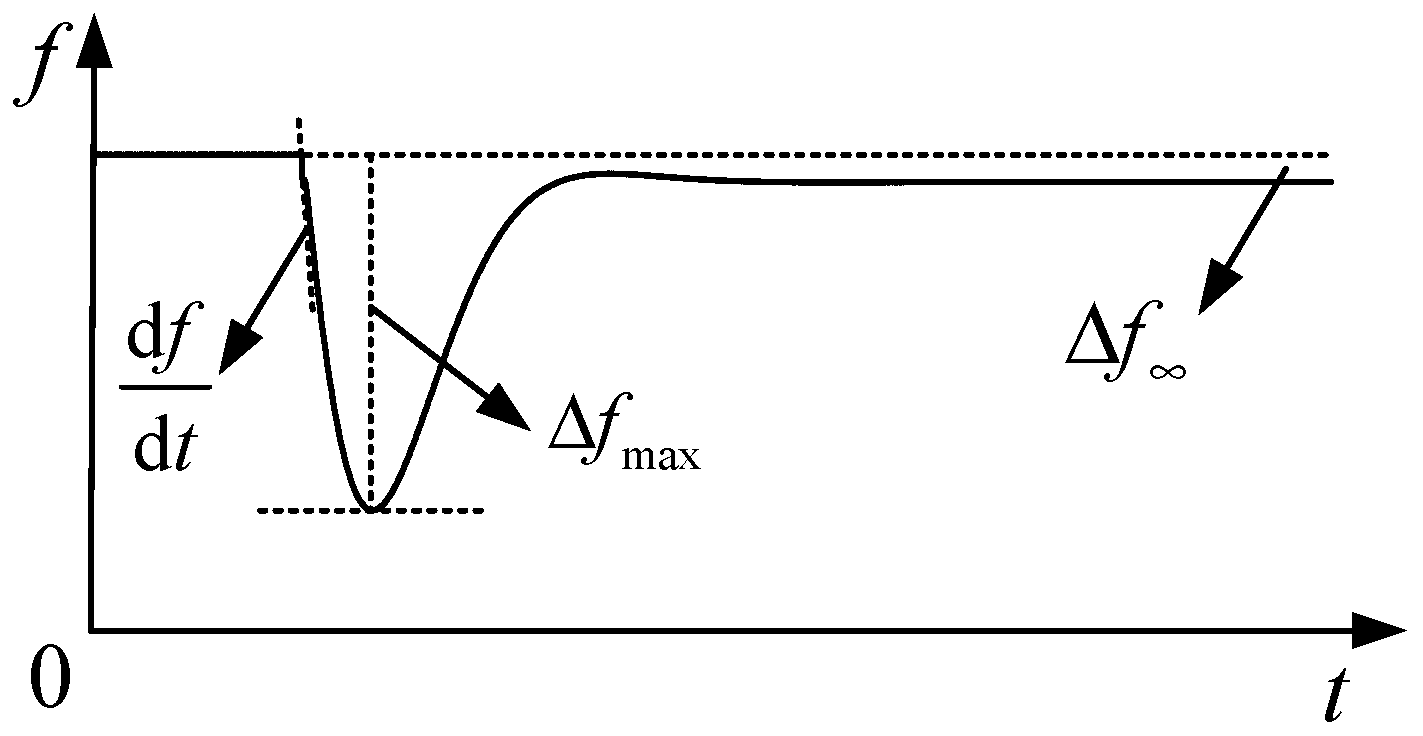
4.1. Target of System Frequency Regulation
4.2. Hierarchical Cooperative Control Strategy Based on Model Prediction
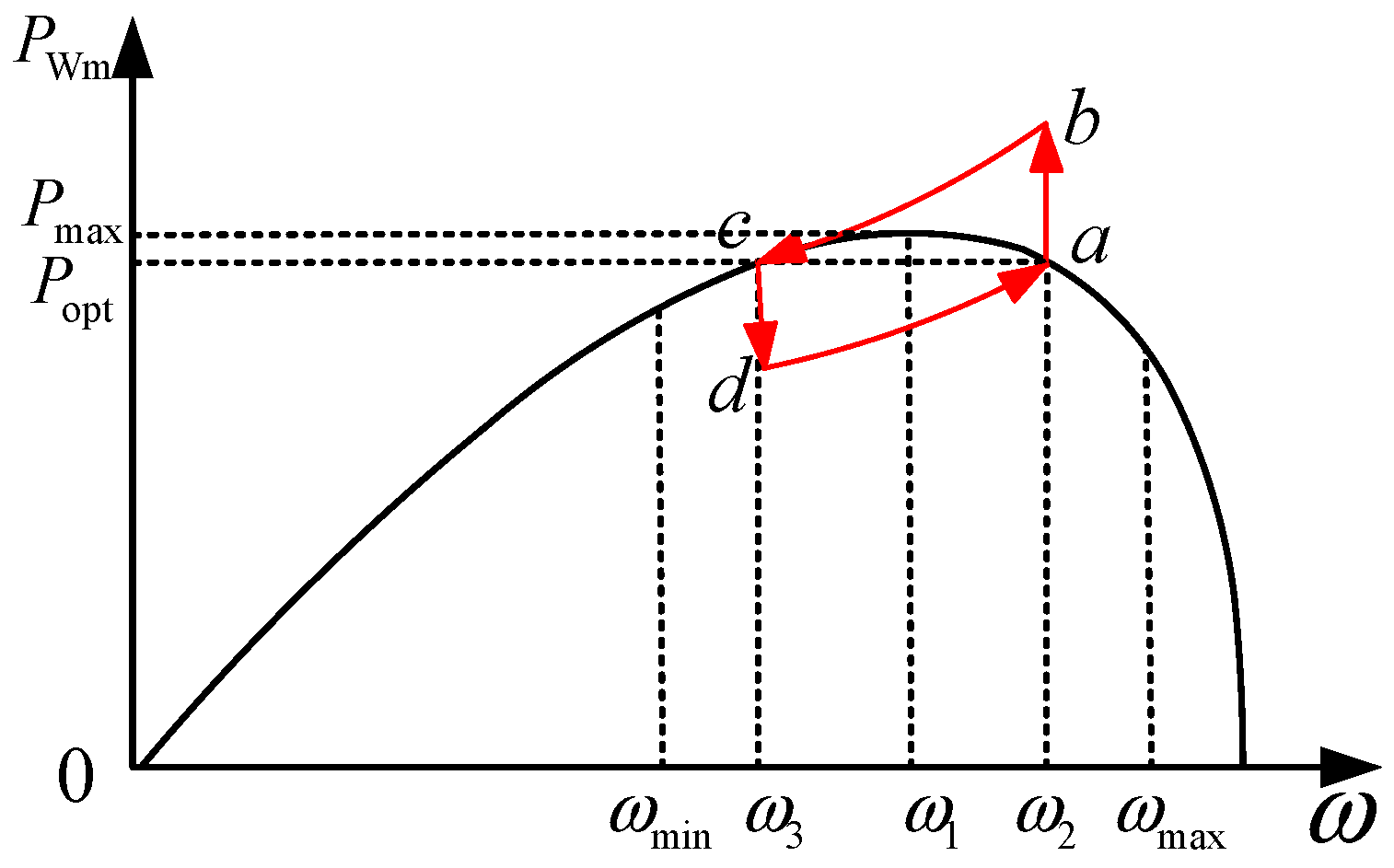
4.3. Power Compensation Strategy during Rotor Speed Recovery of DFIG
5. Example Test
5.1. Parameters Setting
5.2. Results Analysis
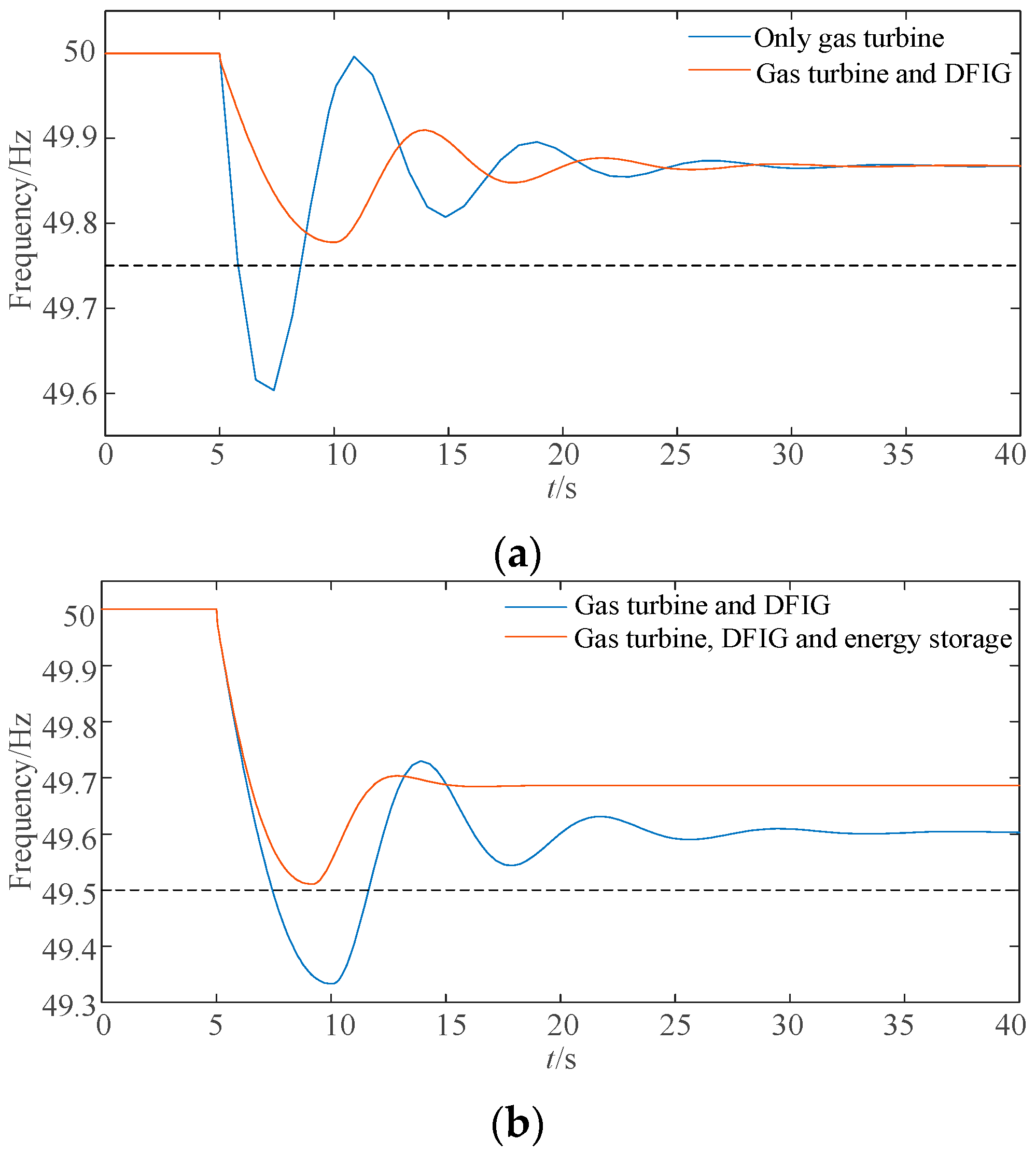
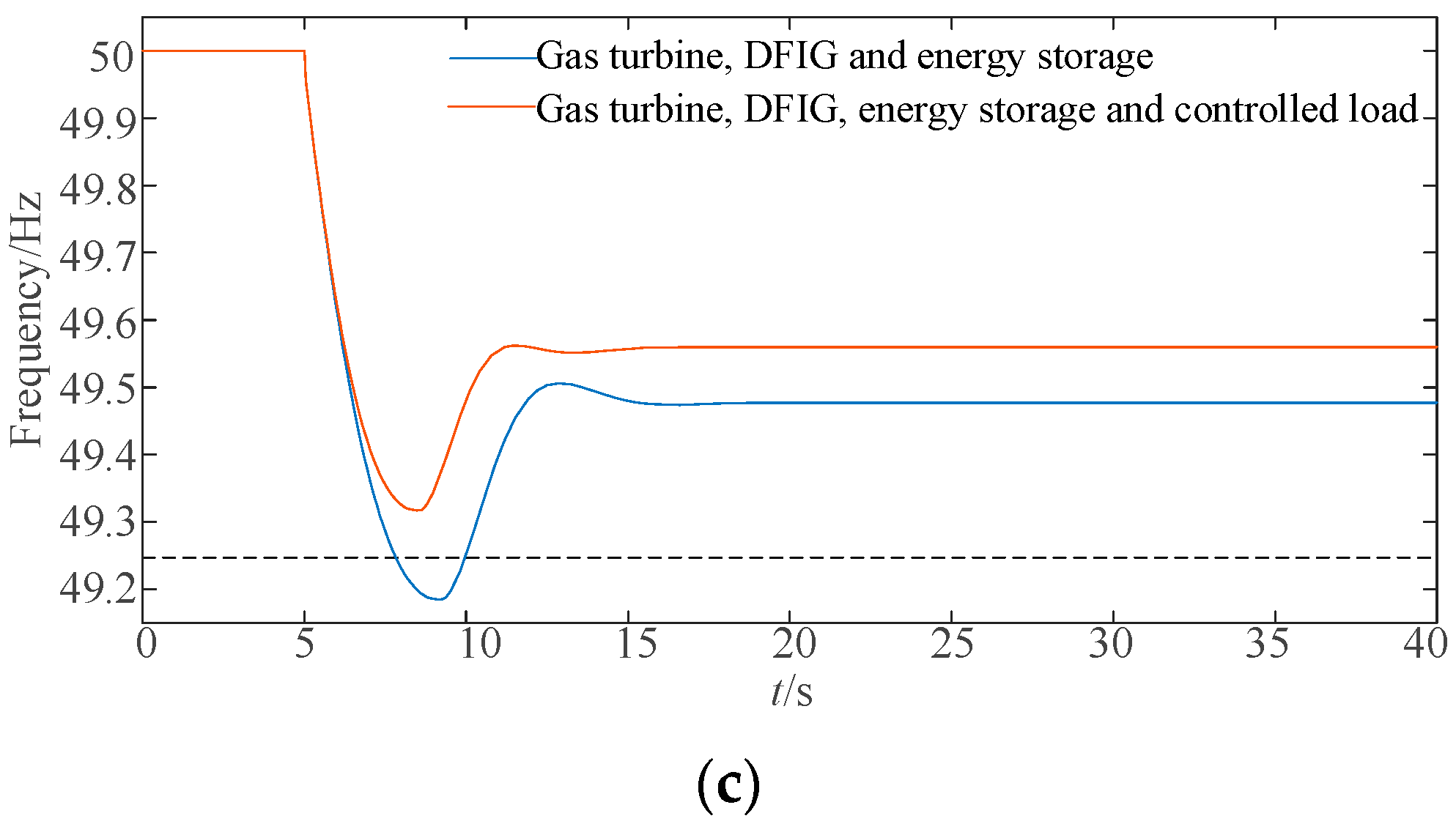
5.2.1. System Frequency Response Results under Different Load Disturbances
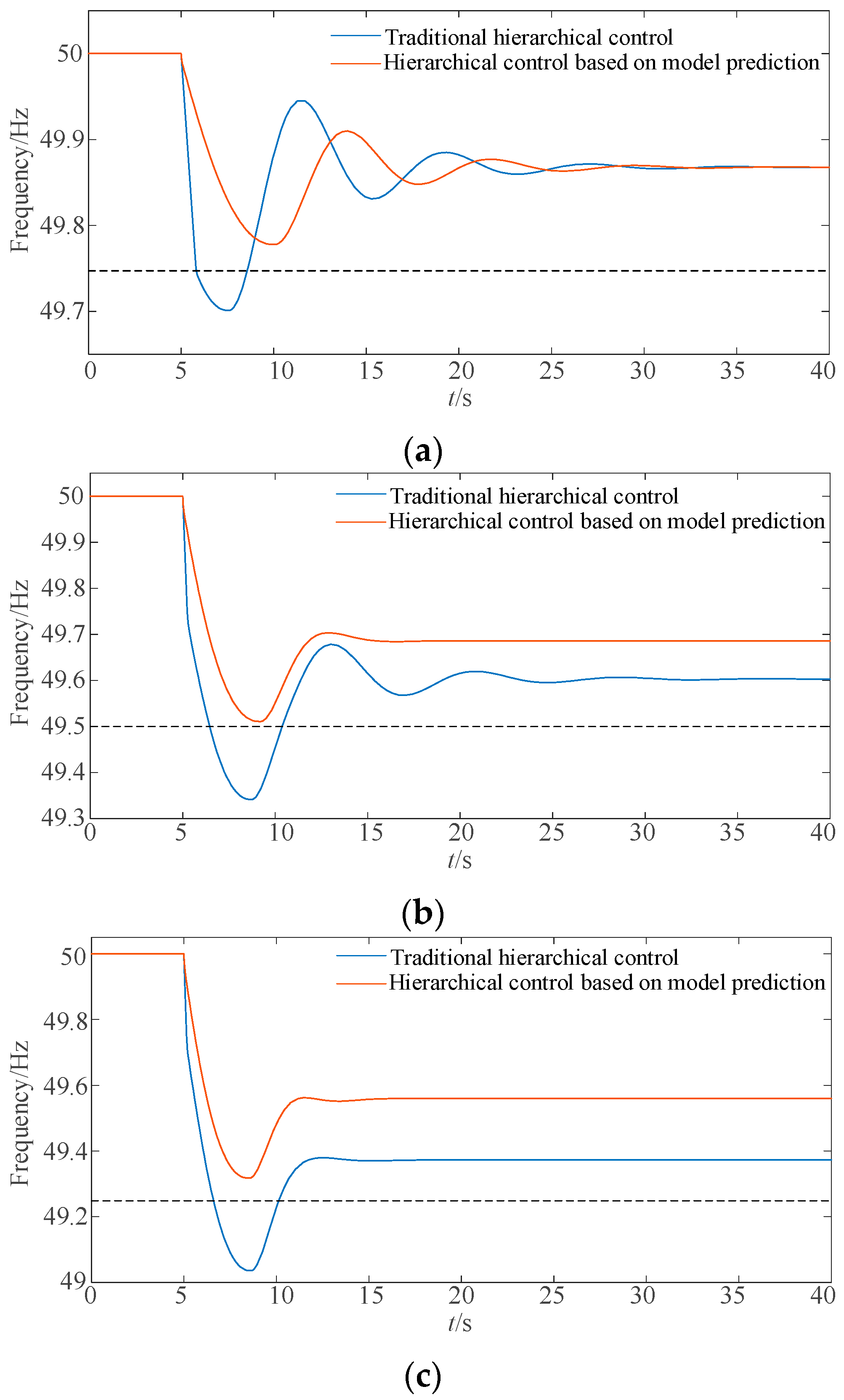
5.2.2. Comparison with Traditional Hierarchical Control Strategy
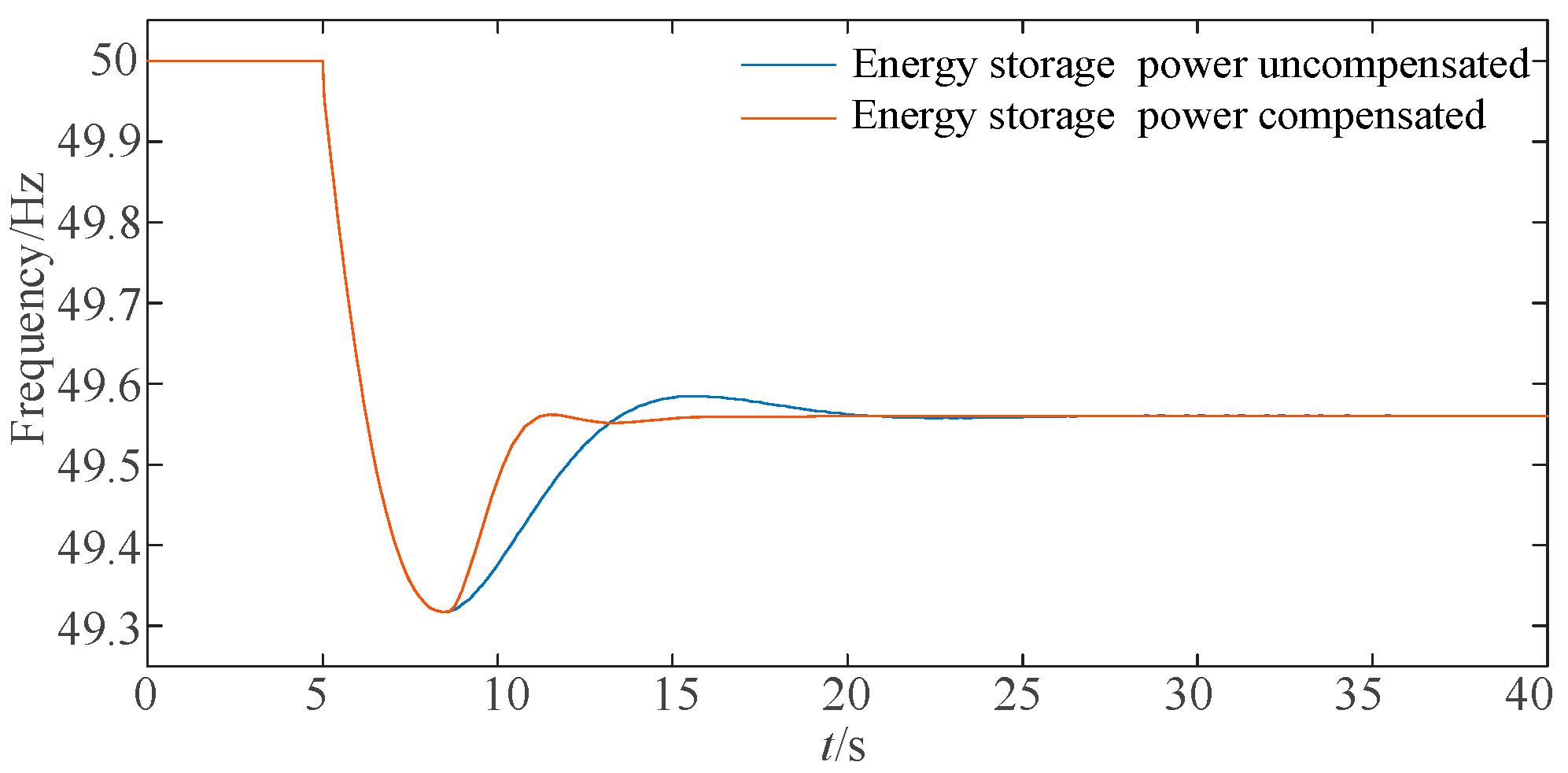
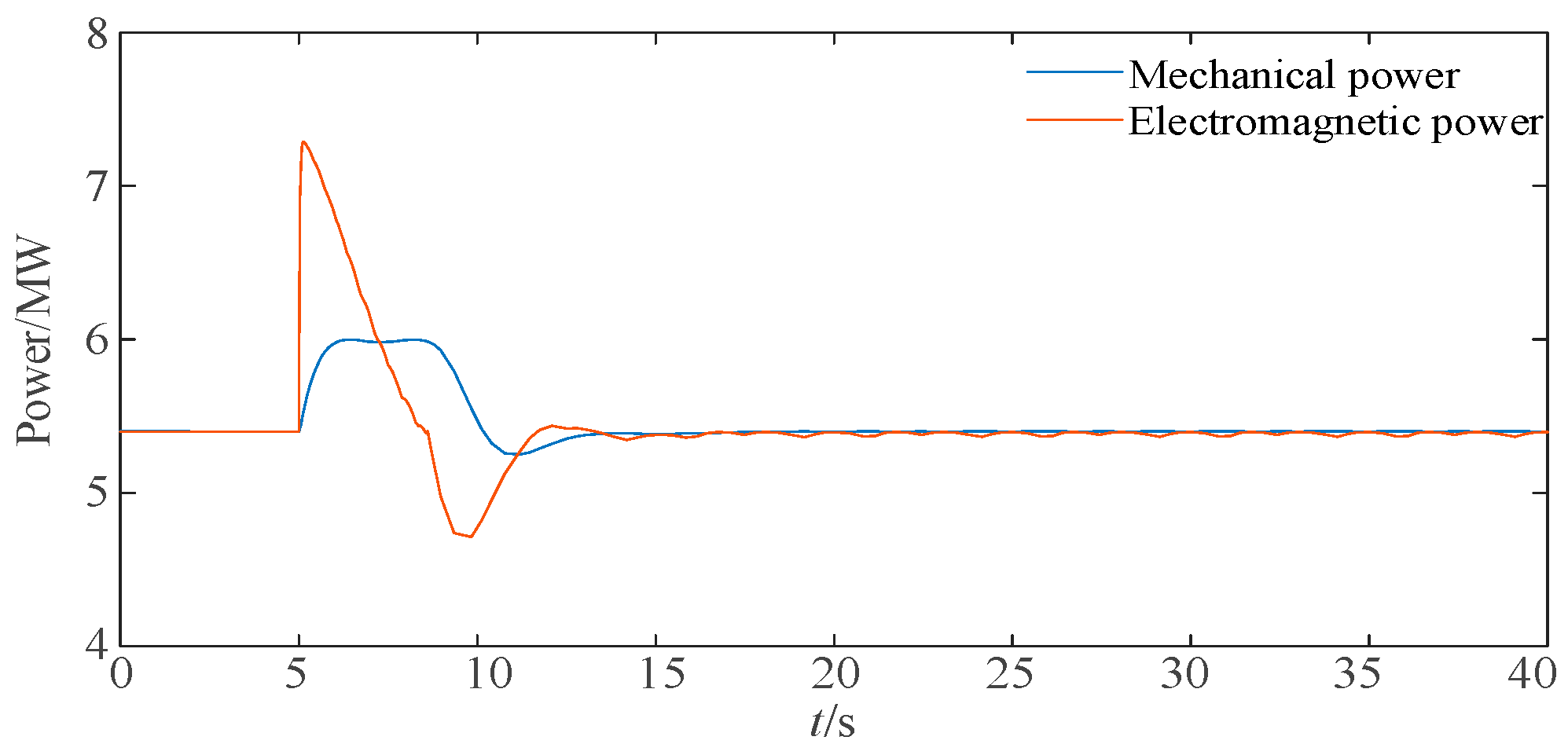
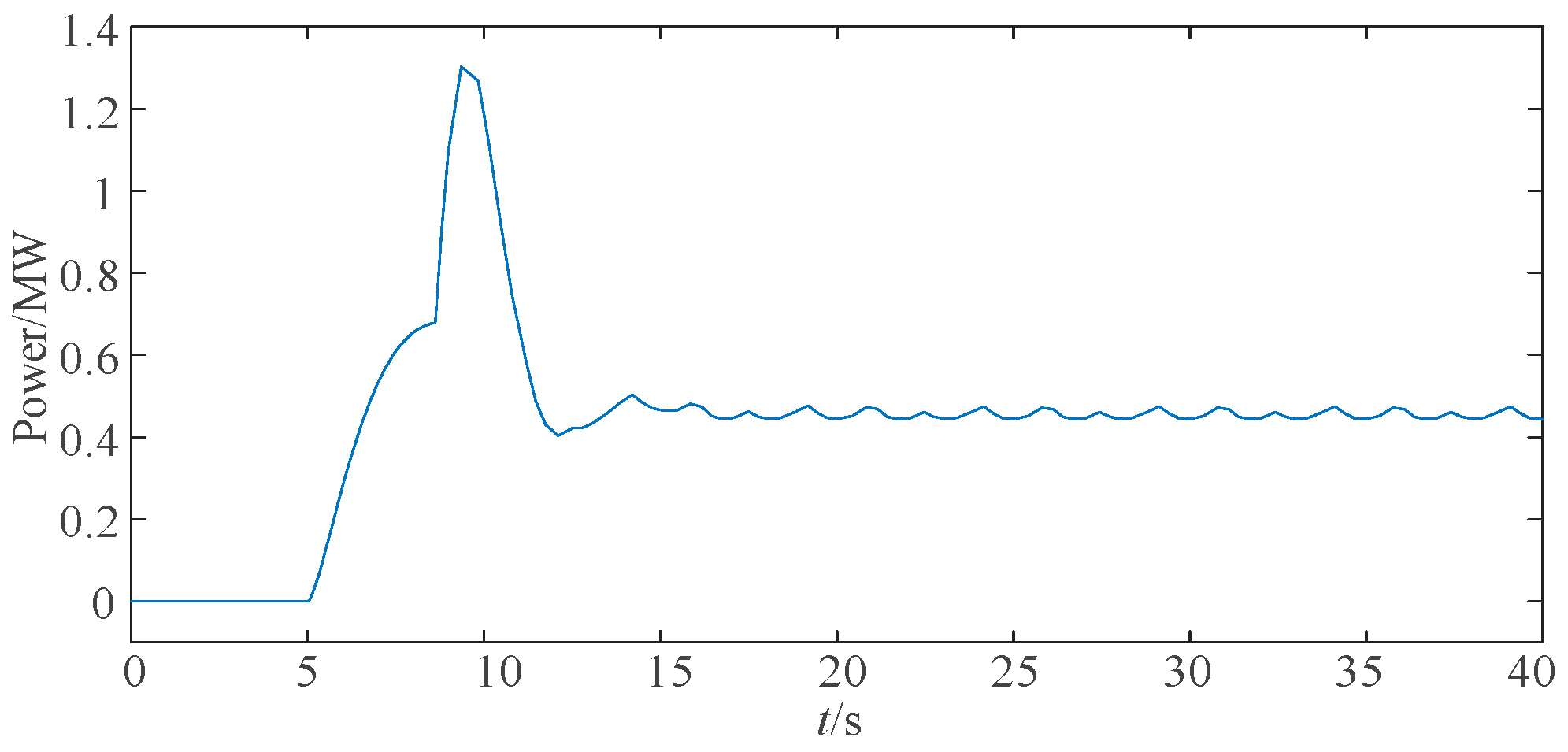
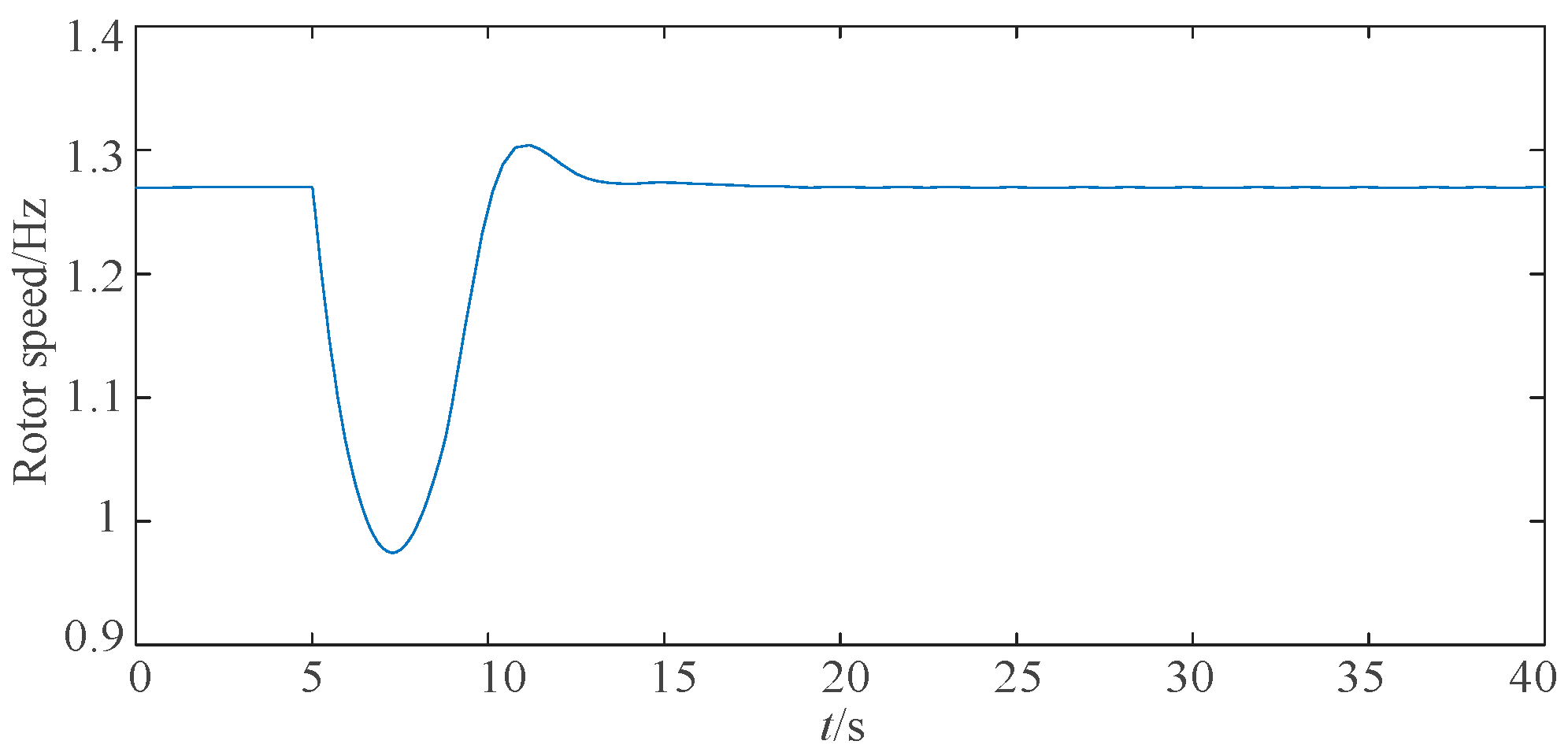
5.2.3. Validation of Fan Speed Recovery Control Strategy
6. Conclusions
- The proposed strategy fully considers the frequency regulation capability of various resources in the microgrid, and improves the frequency stability of the system through the coordinated frequency regulation control of the gas turbine, DFIG, energy storage, and controllable load.
- The proposed strategy can predict the maximum frequency deviation of the system, control the corresponding resources to participate in frequency regulation in advance, which effectively reduces the system frequency deviation, and shortens the system stability arrival time.
- In the process of rotor speed recovery of DFIG, the power absorbed by DFIG is compensated by energy storage, which can reduce the system frequency fluctuation, speed up the frequency recovery, and avoid the secondary frequency drop.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saeed, M.H.; Fang, W.; Kalwar, B.A.; Iqbal, S. A Review on Microgrids’ Challenges & Perspectives. IEEE Access 2021, 9, 166502–166517. [Google Scholar] [CrossRef]
- Pahasa, J.; Potejana, P.; Ngamroo, I. MPC-Based Virtual Energy Storage System Using PV and Air Conditioner to Emulate Virtual Inertia and Frequency Regulation of the Low-Inertia Microgrid. IEEE Access 2022, 10, 133708–133719. [Google Scholar] [CrossRef]
- Wen, Y.; Chung, C.Y.; Liu, X.; Che, L. Microgrid Dispatch with Frequency-Aware Islanding Constraints. IEEE Trans. Power Syst. 2019, 34, 2465–2468. [Google Scholar] [CrossRef]
- Wang, T.; Jin, M.; Li, Y.; Wang, J.; Wang, Z.; Huang, S. Adaptive Damping Control Scheme for Wind Grid-Connected Power Systems with Virtual Inertia Control. IEEE Trans. Power Syst. 2022, 37, 3902–3912. [Google Scholar] [CrossRef]
- Liu, B.; Zhao, J.; Huang, Q.; Milano, F.; Zhang, Y.; Hu, W. Nonlinear Virtual Inertia Control of WTGs for Enhancing Primary Frequency Response and Suppressing Drivetrain Torsional Oscillations. IEEE Trans. Power Syst. 2021, 36, 4102–4113. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Ouyang, J.; Pang, M.; Li, M.; Zheng, D.; Tang, T.; Wang, W. Frequency control method based on the dynamic deloading of DFIGs for power systems with high-proportion wind energy. Int. J. Electr. Power Energy Syst. 2021, 128, 106764. [Google Scholar] [CrossRef]
- Zhao, J.; Lyu, X.; Fu, Y.; Hu, X.; Li, F. Coordinated Microgrid Frequency Regulation Based on DFIG Variable Coefficient Using Virtual Inertia and Primary Frequency Control. IEEE Trans. Energy Convers. 2016, 31, 833–845. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Fast-Frequency Response Provided by DFIG-Wind Turbines and its Impact on the Grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Tang, X.; Yin, M.; Shen, C.; Xu, Y.; Dong, Z.; Zou, Y. Active Power Control of Wind Turbine Generators via Coordinated Rotor Speed and Pitch Angle Regulation. IEEE Trans. Sustain. Energy 2019, 10, 822–832. [Google Scholar] [CrossRef]
- Boyle, J.; Littler, T.; Foley, A. Frequency Regulation and Operating Reserve Techniques for Variable Speed Wind Turbines. IEEE Madrid PowerTech 2021, 1–5, 5072. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, D.W.; Zhang, H.; Yan, S.; Wang, X. Coordinated Control Strategy of Battery Energy Storage System and PMSG-WTG to Enhance System Frequency Regulation Capability. IEEE Trans. Sustain. Energy 2017, 8, 1330–1343. [Google Scholar] [CrossRef]
- Jalal, H.; Meysam, G.; Hassan, R. Mohammad Hassan Khooban. Survey on microgrids frequency regulation: Modeling and control systems. Electr. Power Syst. Res. 2022, 213, 108719. [Google Scholar] [CrossRef]
- Alghamdi, B.; Cañizares, C. Frequency Regulation in Isolated Microgrids through Optimal Droop Gain and Voltage Control. IEEE Trans. Smart Grid 2021, 12, 988–998. [Google Scholar] [CrossRef]
- Ma, Y.; Yang, P.; Wang, Y.; Zhou, S.; He, P. Frequency control of islanded microgrid based on wind-PV-diesel-battery hybrid energy sources. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), New York, NY, USA, 22–25 October 2014; pp. 290–294. [Google Scholar] [CrossRef]
- Tu, S.; Zhang, B.; Jin, X. Research on DFIG-ES System to Enhance the Fast-Frequency Response Capability of Wind Farms. Energies 2019, 12, 3581. [Google Scholar] [CrossRef]
- Jiang, T.; Ju, P.; Wang, C.; Li, H.; Liu, J. Coordinated Control of Air-Conditioning Loads for System Frequency Regulation. IEEE Trans. Smart Grid 2021, 12, 548–560. [Google Scholar] [CrossRef]
- Kaur, K.; Kumar, N.; Singh, M. Coordinated Power Control of Electric Vehicles for Grid Frequency Support: MILP-Based Hierarchical Control Design. IEEE Trans. Smart Grid 2019, 10, 3364–3373. [Google Scholar] [CrossRef]
- Olivares, D.; Mehrizi-Sani, A.; Etemadi, A.; Cañizares, C.; Iravani, R.; Kazerani, M.; Hatziargyriou, N. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Bian, X.; Jiang, Y.; Zhao, Y.; Li, D. Coordinated Frequency Regulation Strategy of Wind, Diesel and Load for Microgrid with High-penetration Renewable Energy. Autom. Electr. Power Syst. 2018, 42, 102–109. (In Chinese) [Google Scholar]
- Wang, T.; Wang, T.; Liu, R.; Li, G.; Qi, X.; Miao, S. Unit Commitment Model of High Proportion Wind Power System Considering Dynamic Frequency Response Constraints. High Volt. Eng. 2021, 47, 3463–3479. (In Chinese) [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameters | Value/s | Model Parameters | Value/s |
|---|---|---|---|
| Hm | 4 | Dm | 1 |
| Tm | 3.8 | Km | 20 |
| Tw | 0.1 | Kw | 40 |
| TE | 0.3 | KE | 50 |
| TL | 1 | KL | 45 |
| 0.375 Hz/s | 0.5 MW | Gas turbine | 0.394 Hz/s |
| DFIG | 0.221 Hz/s | ||
| 1.000 Hz/s | 1.5 MW | DFIG | 0.666 Hz/s |
| wind-storage | 0.485 Hz/s | ||
| 1.750 Hz/s | 2.5 MW | wind-storage | 0.814 Hz/s |
| wind-storage-load | 0.682 Hz/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Liu, C.; Liu, Z.; Wang, T.; Ke, F.; Yang, D.; Zhang, D.; Miao, S. A Hierarchical Cooperative Frequency Regulation Control Strategy of Wind-Storage-Load in a Microgrid Based on Model Prediction. Energies 2023, 16, 1886. https://doi.org/10.3390/en16041886
Wang Y, Liu C, Liu Z, Wang T, Ke F, Yang D, Zhang D, Miao S. A Hierarchical Cooperative Frequency Regulation Control Strategy of Wind-Storage-Load in a Microgrid Based on Model Prediction. Energies. 2023; 16(4):1886. https://doi.org/10.3390/en16041886
Chicago/Turabian StyleWang, Yicong, Chang Liu, Zhiwei Liu, Tingtao Wang, Fangchao Ke, Dongjun Yang, Dongyin Zhang, and Shihong Miao. 2023. "A Hierarchical Cooperative Frequency Regulation Control Strategy of Wind-Storage-Load in a Microgrid Based on Model Prediction" Energies 16, no. 4: 1886. https://doi.org/10.3390/en16041886