
Model Predictive Control of DC–DC Boost Converter Based on Generalized Proportional Integral Observer

Abstract
:1. Introduction
- (1)
- The proposed composite MPC with the integrated GPIO achieves offset-free tracking performance under time-varying disturbances.
- (2)
- The proposed method allows a long prediction horizon, which helps to improve the stability and performance compared with a short prediction horizon.
- (3)
- Solving the optimization problem online is not required in this paper, as the optimal control law is given explicitly; thus, the online computational burden is limited.
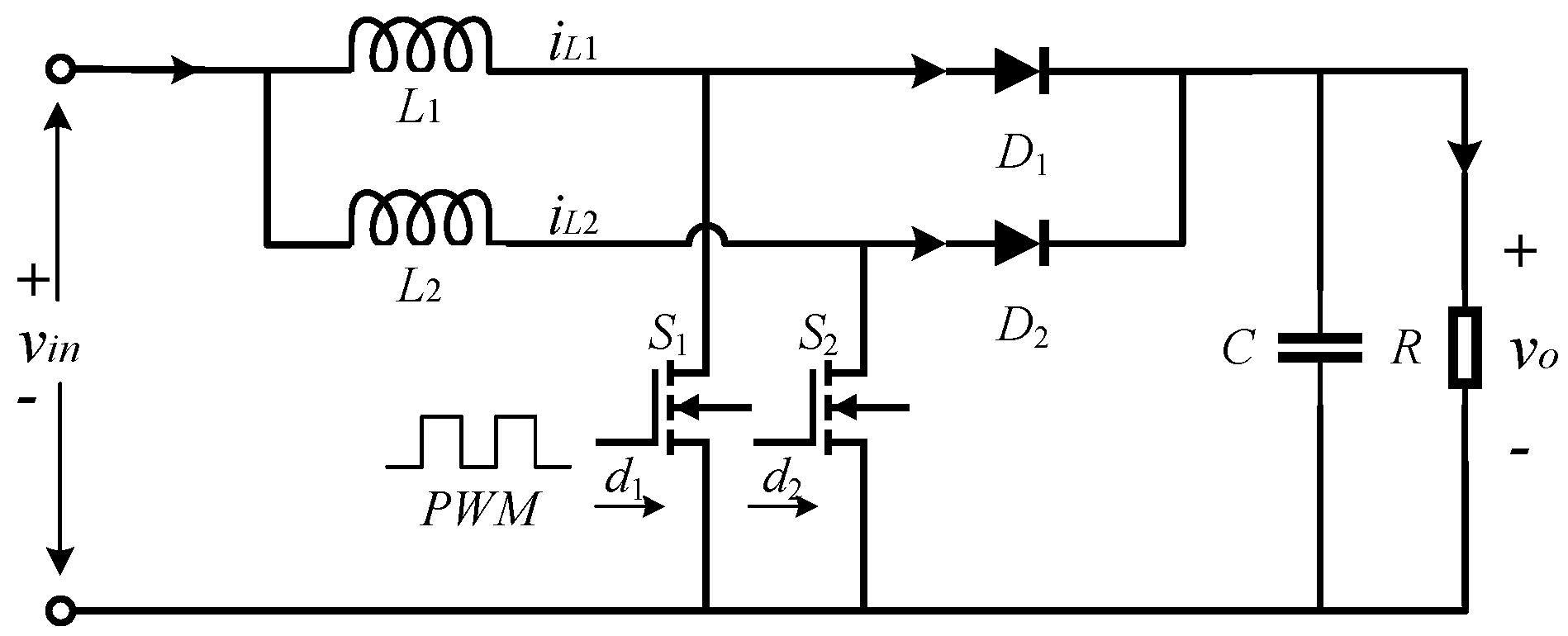
2. Topology Analysis and Modeling
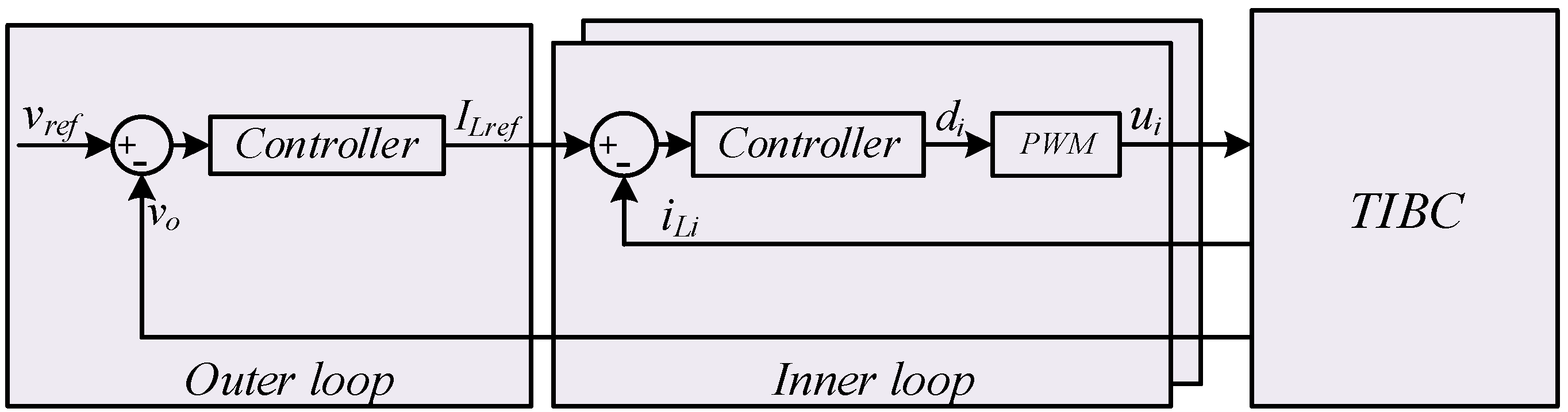
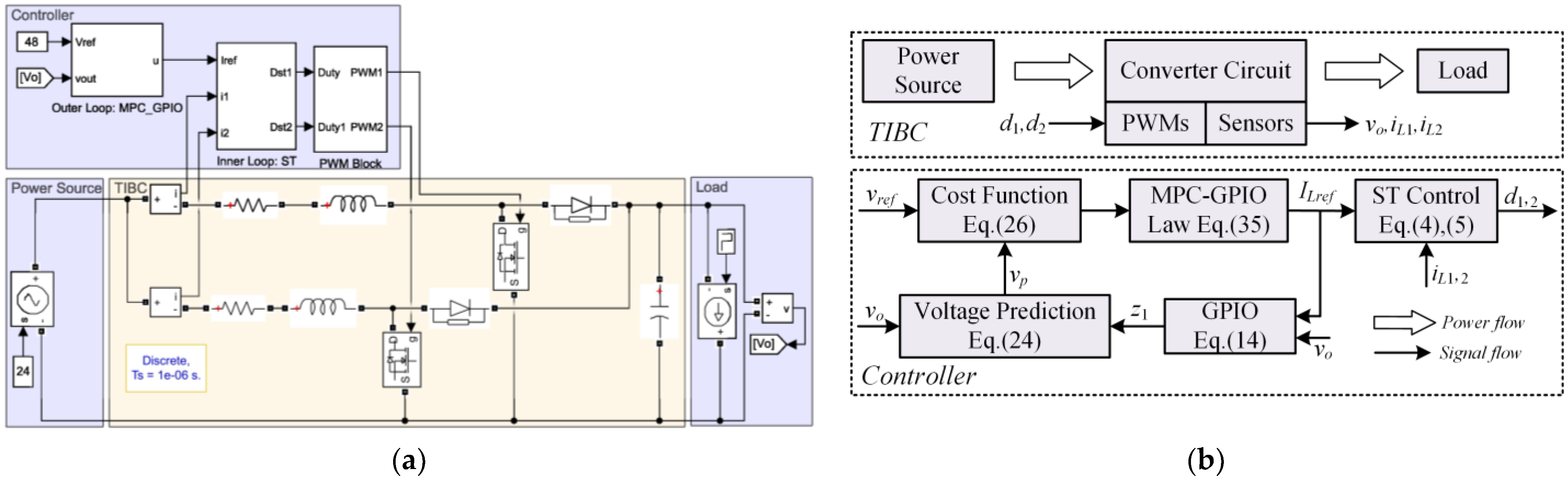
3. Overall Control Strategy
3.1. Current Control
3.2. Voltage Control
3.2.1. Design of GPIO
3.2.2. Design of MPC
- Prediction Model
- 2.
- Definition of Cost Function
- 3.
- Optimized Control Law Design
3.2.3. Stability Analysis
4. Simulation Results
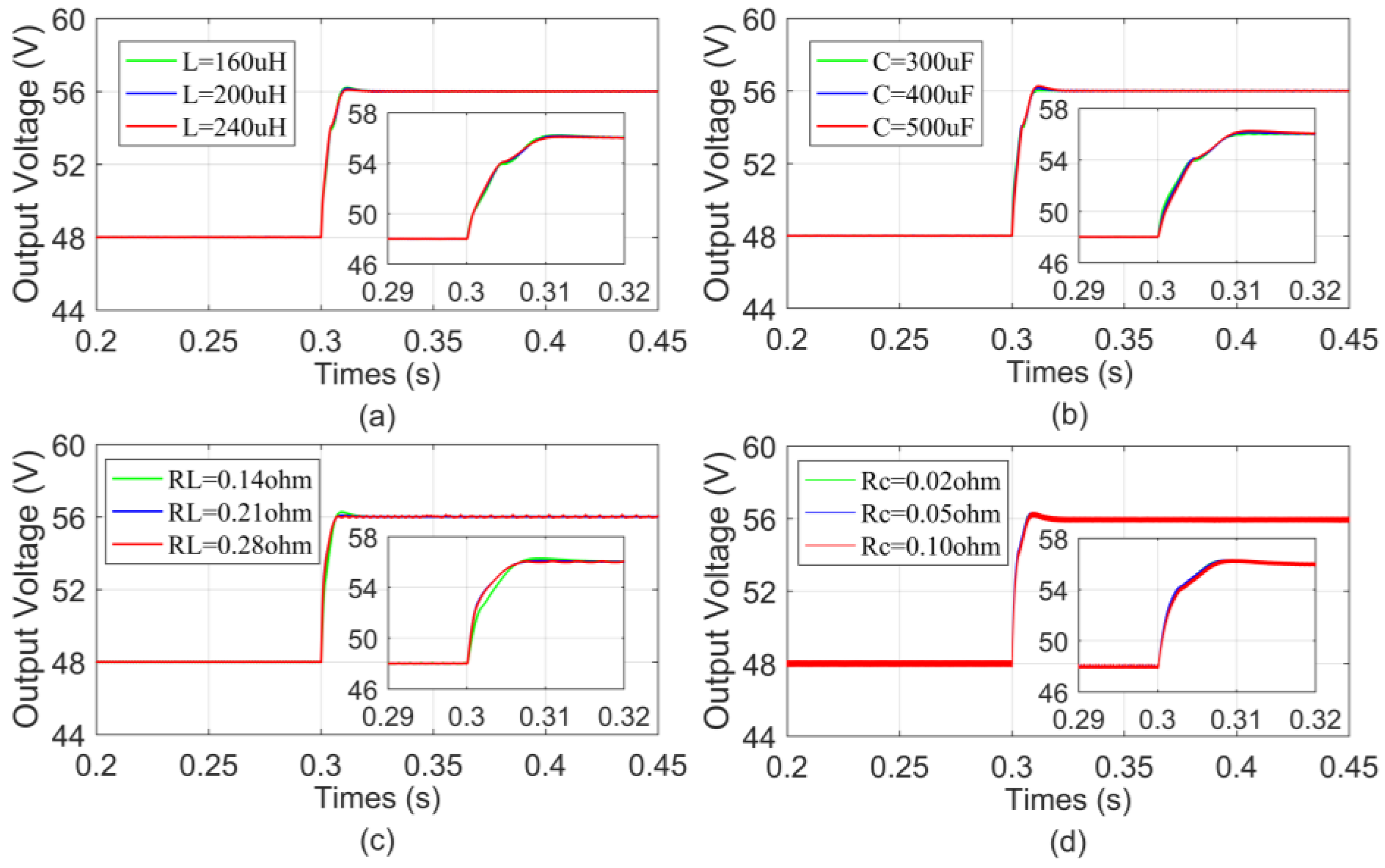
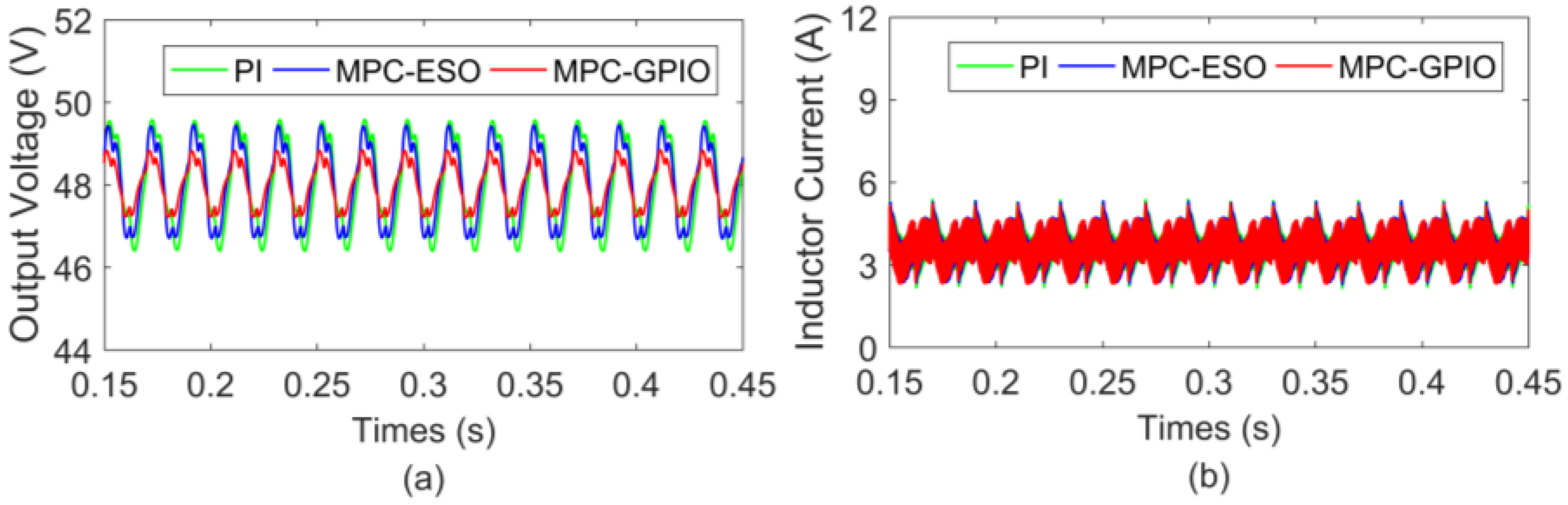
4.1. Circuit Parameter Uncertainties
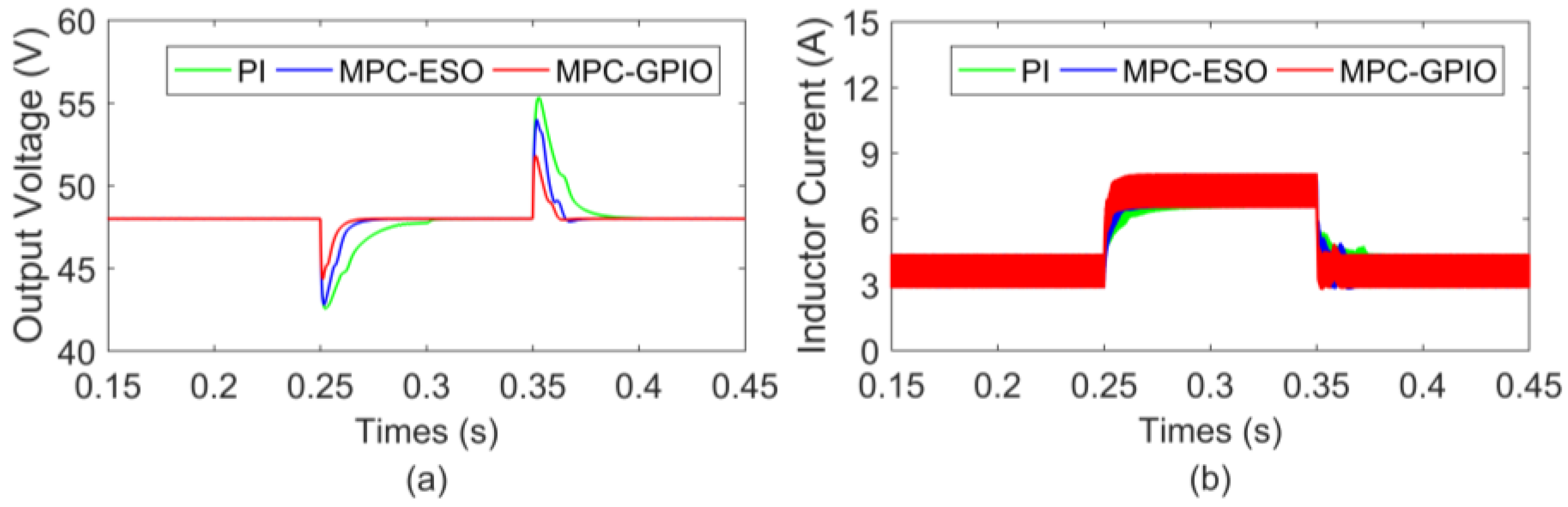
4.2. Power Source Disturbances
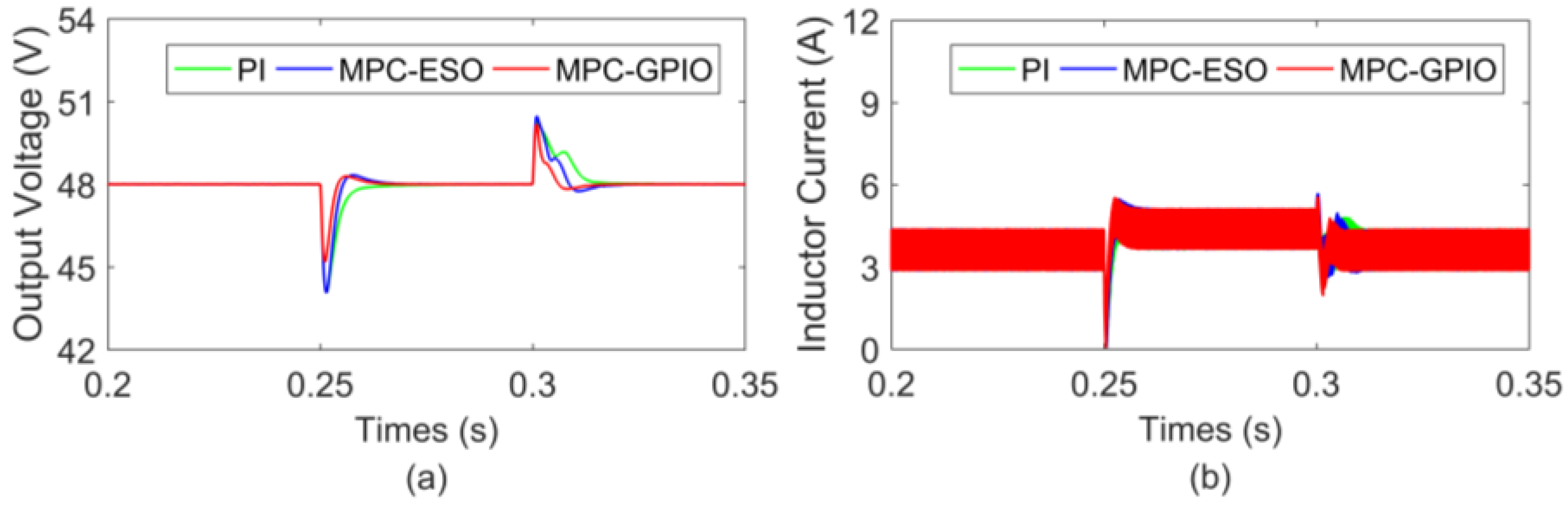
4.3. Load Disturbances
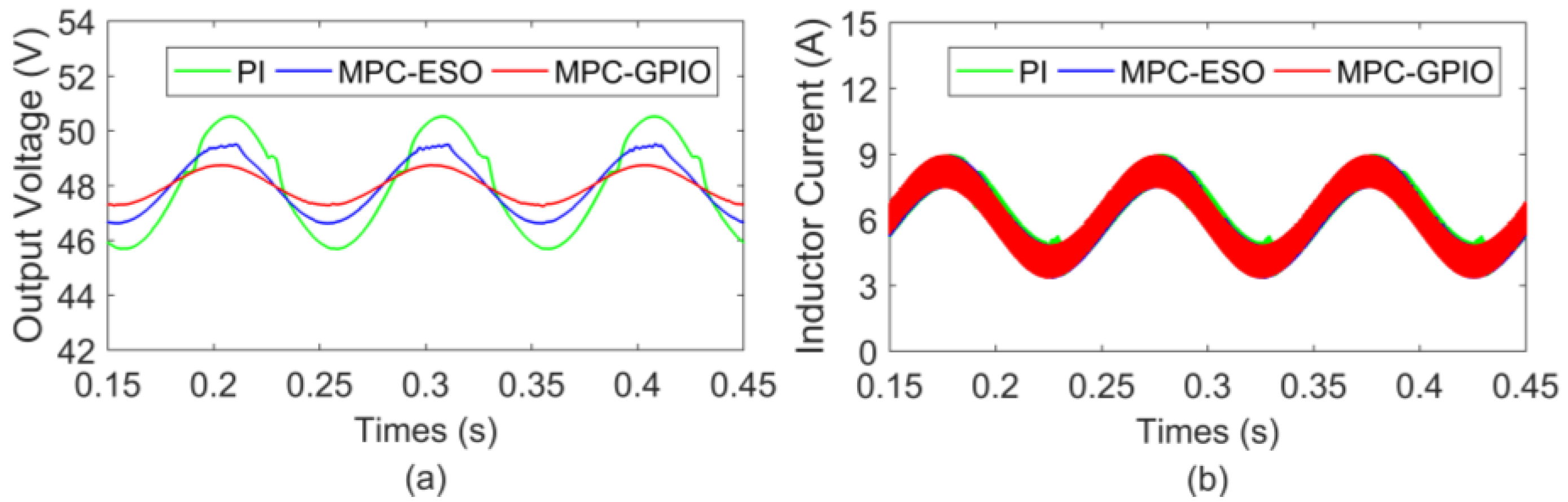
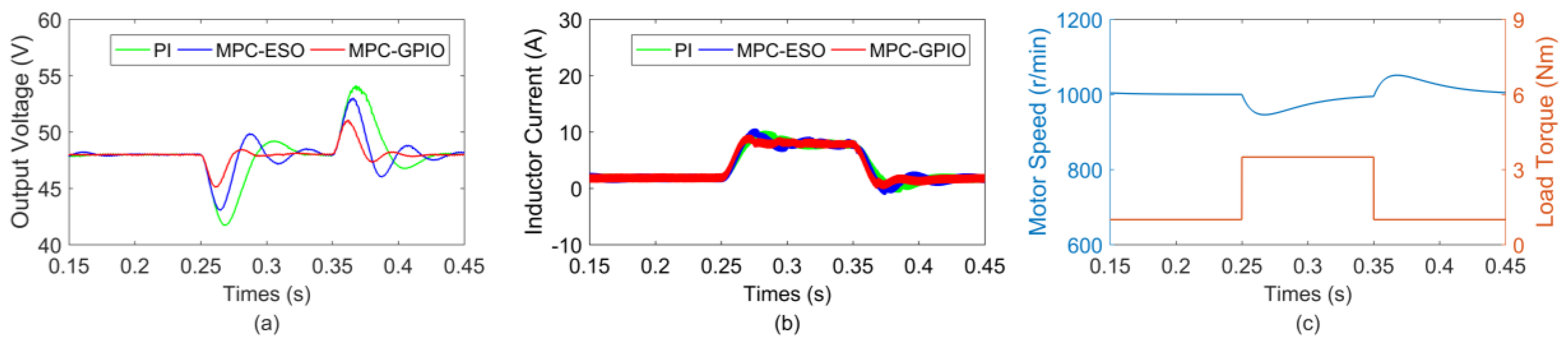
4.4. Electric Machine Load
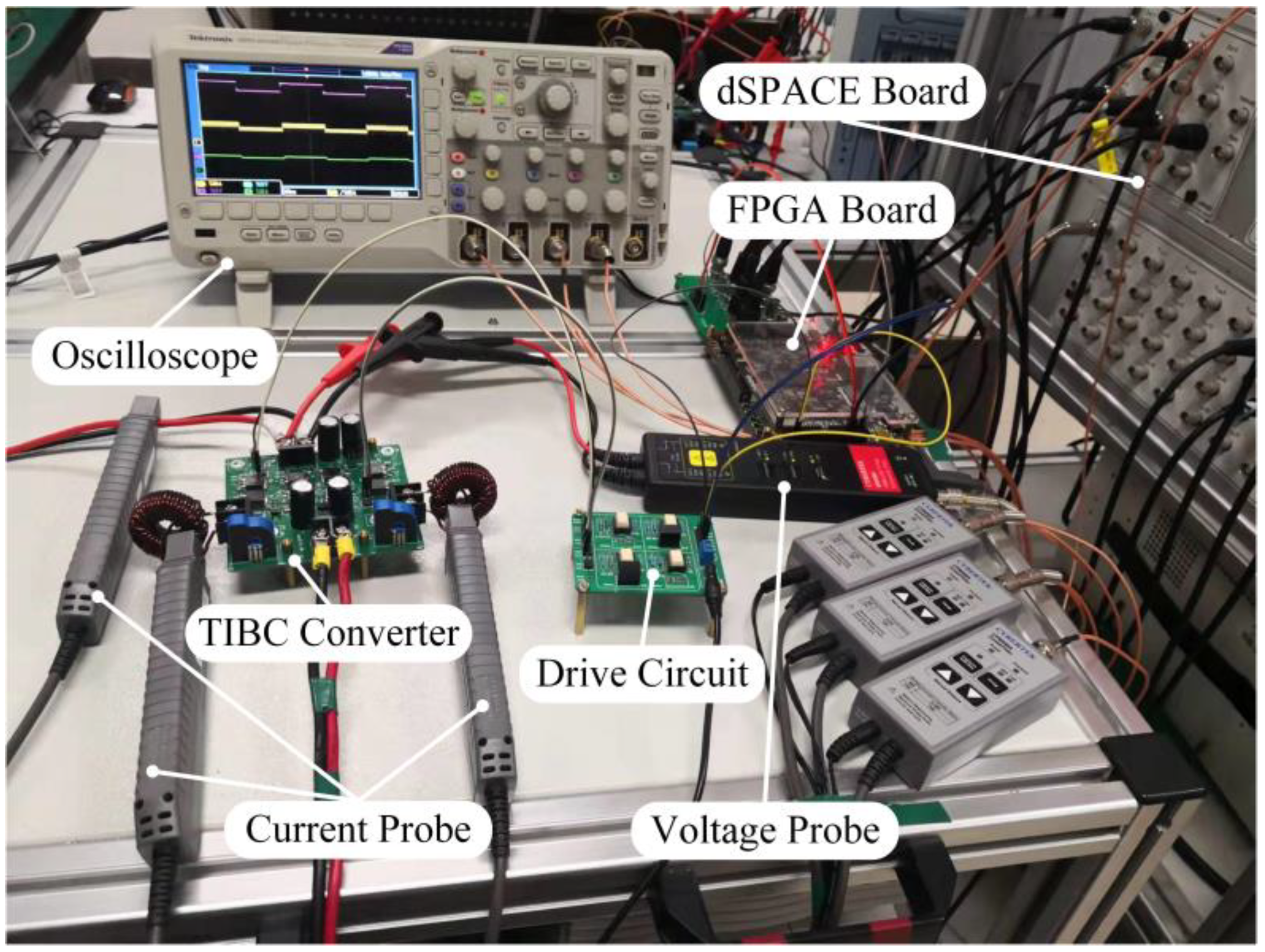
5. Experimental Results
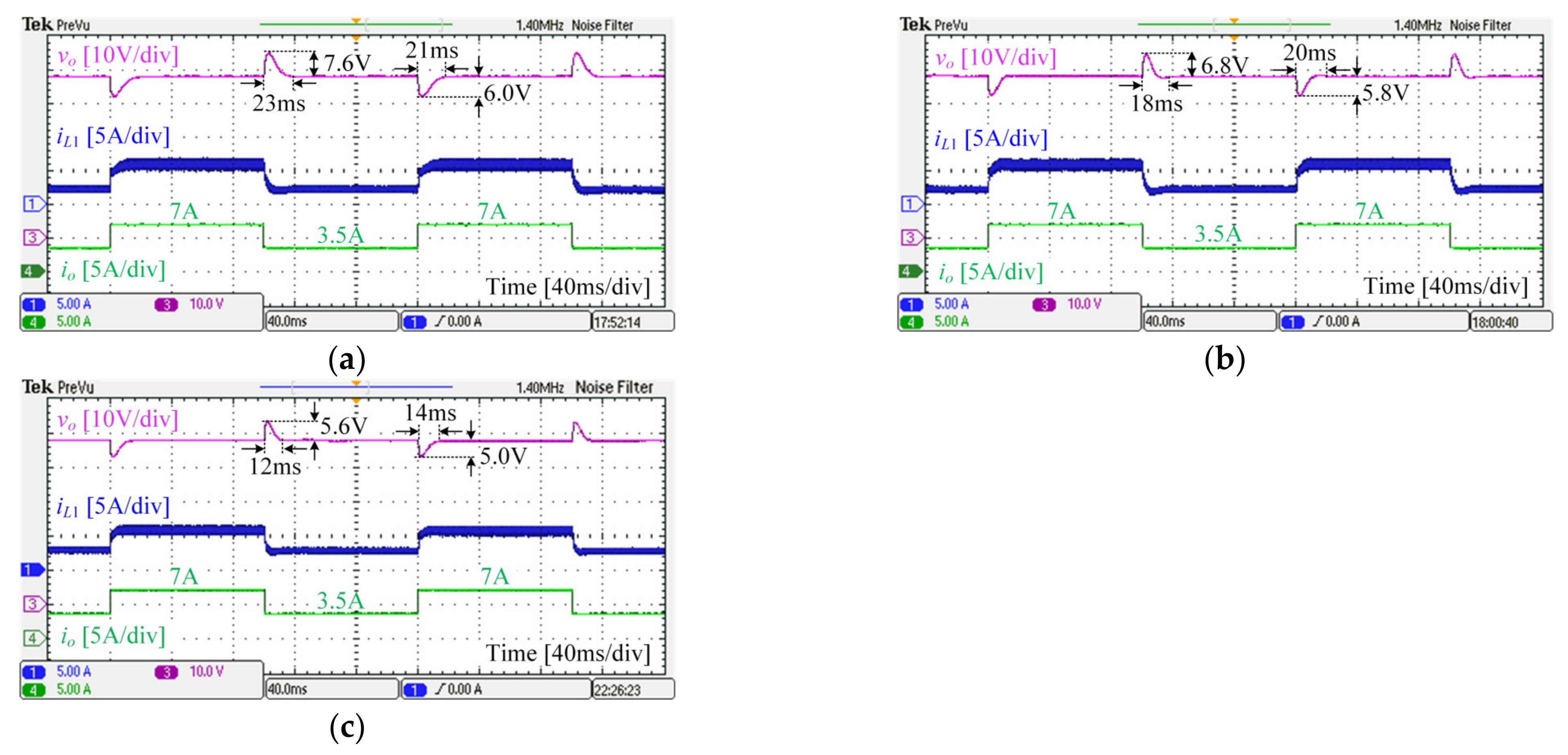
5.1. Step Load Disturbance
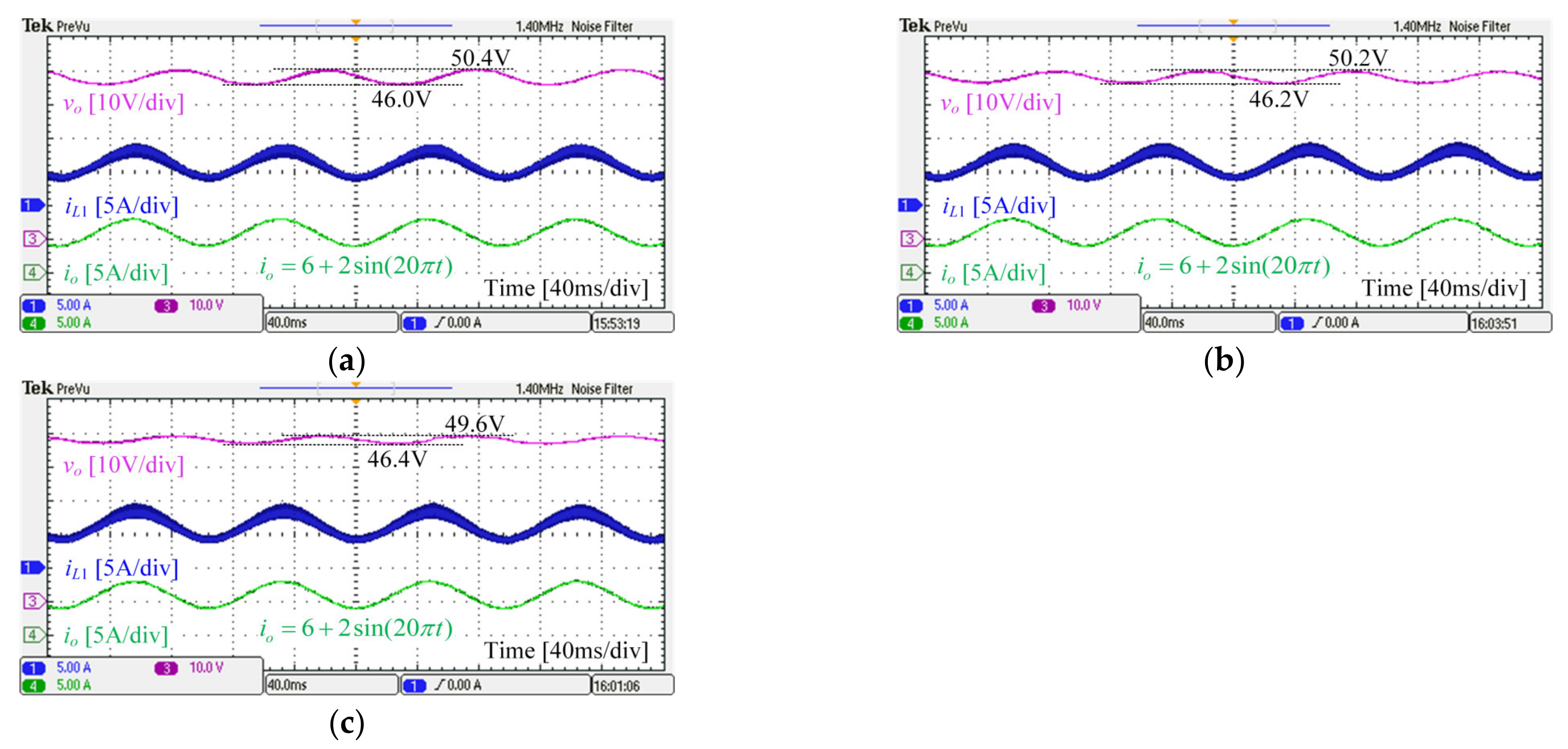
5.2. Time-Varying Load Disturbance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mesquita da Silva, J.A.; Deaecto, G.S.; Barros, T.A.d.S. Analysis and Design Aspects of Min-Type Switching Control Strategies for Synchronous Buck–Boost Converter. Energies 2022, 15, 2302. [Google Scholar] [CrossRef]
- Fantino, R.A.; Christian, S.F.; Balda, J.C. Synchronous-Variable-Frequency Control of Bidirectional DCM Interleaved DC–DC Converter for Wide-Range Enhanced Efficiency. IEEE Trans. Ind. Electron. 2021, 69, 5844–5853. [Google Scholar] [CrossRef]
- Rahimi, T.; Ding, L.; Kheshti, M.; Faraji, R. A ZVS Three-Phase Interleaved DC-DC converter with SFM control method for the Microgrid Applications. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Kabalo, M.; Paire, D.; Blunier, B.; Bouquain, D.; Simões, M.G.; Miraoui, A. Experimental evaluation of four-phase floating interleaved boost converter design and control for fuel cell applications. IET Power Electron. 2013, 6, 215–226. [Google Scholar] [CrossRef] [Green Version]
- Garcia, F.S.; Pomilio, J.A.; Spiazzi, G. Modeling and Control Design of the Interleaved Double Dual Boost Converter. IEEE Trans. Ind. Electron. 2012, 60, 3283–3290. [Google Scholar] [CrossRef]
- El Beid, S.; Doubabi, S. DSP-Based Implementation of Fuzzy Output Tracking Control for a Boost Converter. IEEE Trans. Ind. Electron. 2013, 61, 196–209. [Google Scholar] [CrossRef]
- Kobaku, T.; Patwardhan, S.C.; Agarwal, V. Experimental Evaluation of Internal Model Control Scheme on a DC–DC Boost Converter Exhibiting Nonminimum Phase Behavior. IEEE Trans. Power Electron. 2017, 32, 8880–8891. [Google Scholar] [CrossRef]
- Xu, Q.; Jiang, W.; Blaabjerg, F.; Zhang, C.; Zhang, X.; Fernando, T. Backstepping Control for Large Signal Stability of High Boost Ratio Interleaved Converter Interfaced DC Microgrids With Constant Power Loads. IEEE Trans. Power Electron. 2019, 35, 5397–5407. [Google Scholar] [CrossRef]
- Yuan, C.; Bai, H.; Ma, R.; Huangfu, Y. Large-Signal Stability Analysis and Design of Finite-Time Controller for the Electric Vehicle DC Power System. IEEE Trans. Ind. Appl. 2021, 58, 868–878. [Google Scholar] [CrossRef]
- Yang, T.; Liao, Y. Discrete Sliding Mode Control Strategy for Start-Up and Steady-State of Boost Converter. Energies 2019, 12, 2990. [Google Scholar] [CrossRef]
- Li, X.; Chen, X. A Multi-Index Feedback Linearization Control for a Buck-Boost Converter. Energies 2021, 14, 1496. [Google Scholar] [CrossRef]
- You, J.; Fan, W.; Yu, L.; Fu, B.; Liao, M. Disturbance Rejection Control Method of Double-Switch Buck-Boost Converter Using Combined Control Strategy. Energies 2019, 12, 278. [Google Scholar] [CrossRef] [Green Version]
- Valencia-Rivera, G.H.; Amaya, I.; Cruz-Duarte, J.M.; Ortíz-Bayliss, J.C.; Avina-Cervantes, J.G. Hybrid Controller Based on LQR Applied to Interleaved Boost Converter and Microgrids under Power Quality Events. Energies 2021, 14, 6909. [Google Scholar] [CrossRef]
- Guo, K.; Liu, Q.; Xi, X.; Mao, M.; Wan, Y.; Wu, H. Coordinated Control Strategy of a Combined Converter in a Photovoltaic DC Boost Collection System under Partial Shading Conditions. Energies 2020, 13, 474. [Google Scholar] [CrossRef] [Green Version]
- Barhoumi, E.M.; Ben Belgacem, I.; Khiareddine, A.; Zghaibeh, M.; Tlili, I. A Neural Network-Based Four Phases Interleaved Boost Converter for Fuel Cell System Applications. Energies 2018, 11, 3423. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q.; Yan, Y.; Zhang, C.; Dragicevic, T.; Blaabjerg, F. An Offset-Free Composite Model Predictive Control Strategy for DC/DC Buck Converter Feeding Constant Power Loads. IEEE Trans. Power Electron. 2019, 35, 5331–5342. [Google Scholar] [CrossRef]
- Ebad, M.; Song, B.-M. Accurate model predictive control of bidirectional DC-DC converters for DC distributed power systems. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.-K.; Park, C.R.; Kim, J.-S.; Lee, Y.I. A Stabilizing Model Predictive Controller for Voltage Regulation of a DC/DC Boost Converter. IEEE Trans. Control. Syst. Technol. 2014, 22, 2016–2023. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Xie, R.; Song, J.; Liang, B.; Huangfu, Y. Adaptive Model Predictive Control of an Interleaved Boost Converter Using Real-Time Updated Model. IEEE Trans. Power Electron. 2022, 38, 1720–1731. [Google Scholar] [CrossRef]
- Ramirez, R.O.; Espinoza, J.R.; Baier, C.R.; Rivera, M.; Villarroel, F.; Guzman, J.I.; Melin, P.E. Finite-State Model Predictive Control With Integral Action Applied to a Single-Phase Z-Source Inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 228–239. [Google Scholar] [CrossRef]
- Favato, A.; Carlet, P.G.; Toso, F.; Torchio, R.; Bolognani, S. Integral Model Predictive Current Control for Synchronous Motor Drives. IEEE Trans. Power Electron. 2021, 36, 13293–13303. [Google Scholar] [CrossRef]
- Yang, J.; Zheng, W.X.; Li, S.; Wu, B.; Cheng, M. Design of a Prediction-Accuracy-Enhanced Continuous-Time MPC for Disturbed Systems via a Disturbance Observer. IEEE Trans. Ind. Electron. 2015, 62, 5807–5816. [Google Scholar] [CrossRef]
- He, L.; Wang, F.; Ke, D. FPGA-Based Sliding-Mode Predictive Control for PMSM Speed Regulation System Using an Adaptive Ultralocal Model. IEEE Trans. Power Electron. 2021, 36, 5784–5793. [Google Scholar] [CrossRef]
- Izci, D.; Ekinci, S. A novel improved version of hunger games search algorithm for function optimization and efficient controller design of buck converter system. E-Prime-Adv. Electr. Eng. Electron. Energy 2022, 2, 100039. [Google Scholar] [CrossRef]
- Xiong, W.; Wang, Z.; Zhang, B.; Li, S. Robust Voltage Regulation for DC–DC Converters via a Predictive GPIO-Based Control Approach. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4864–4868. [Google Scholar] [CrossRef]
- Zhou, L.; Eull, M.; Preindl, M. Optimization-Based Estimation and Model Predictive Control for High Performance, Low Cost Software-Defined Power Electronics. IEEE Trans. Power Electron. 2022, 38, 1022–1035. [Google Scholar] [CrossRef]
- Liu, H.; Li, S. Speed Control for PMSM Servo System Using Predictive Functional Control and Extended State Observer. IEEE Trans. Ind. Electron. 2011, 59, 1171–1183. [Google Scholar] [CrossRef]
- Po, L.; Ruiyu, L.; Tianying, S.; Jingrui, Z.; Zheng, F. Composite adaptive model predictive control for DC–DC boost converters. IET Power Electron. 2018, 11, 1706–1717. [Google Scholar] [CrossRef]
- Zhang, H.; Ma, R.; Han, C.; Xie, R.; Liang, B.; Li, Y. Advanced Control Design of Interleaved Boost Converter for Fuel Cell Applications. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 5000–5005. [Google Scholar] [CrossRef]
- Chen, W.-H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.-H.; Ballance, D.J.; Gawthrop, P.J. Optimal control of nonlinear systems: A predictive control approach. Automatica 2003, 39, 633–641. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Nominal input voltage | 16–24 V | |
| Nominal output voltage | 48 V | |
| Nominal inductance | 200 μH | |
| Nominal capacitance | 400 μF | |
| Load power | 300 W | |
| Switching frequency | 50 kHz |
| Laboratory Instruments | Marking | Quantity |
|---|---|---|
| dSPACE board | DS1007 | 1 |
| Power source | PEL-80/40.5 | 1 |
| Electric load | NHR 4760 | 1 |
| FPGA board | Altea EP4CE15F23C8 | 1 |
| Voltage sensor | Cybertek DP6150A | 1 |
| Current sensor | Cybertek CP8050A | 3 |
| Oscilloscope | Tektronix DPO2014B | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, R.; Zhang, H.; Song, J. Model Predictive Control of DC–DC Boost Converter Based on Generalized Proportional Integral Observer. Energies 2023, 16, 1245. https://doi.org/10.3390/en16031245
Niu R, Zhang H, Song J. Model Predictive Control of DC–DC Boost Converter Based on Generalized Proportional Integral Observer. Energies. 2023; 16(3):1245. https://doi.org/10.3390/en16031245
Chicago/Turabian StyleNiu, Rongchao, Hongyu Zhang, and Jian Song. 2023. "Model Predictive Control of DC–DC Boost Converter Based on Generalized Proportional Integral Observer" Energies 16, no. 3: 1245. https://doi.org/10.3390/en16031245