
Smoothing Intermittent Output Power in Grid-Connected Doubly Fed Induction Generator Wind Turbines with Li-Ion Batteries

 , ,
, , 
 ,
,  ,
,
Abstract
:1. Introduction
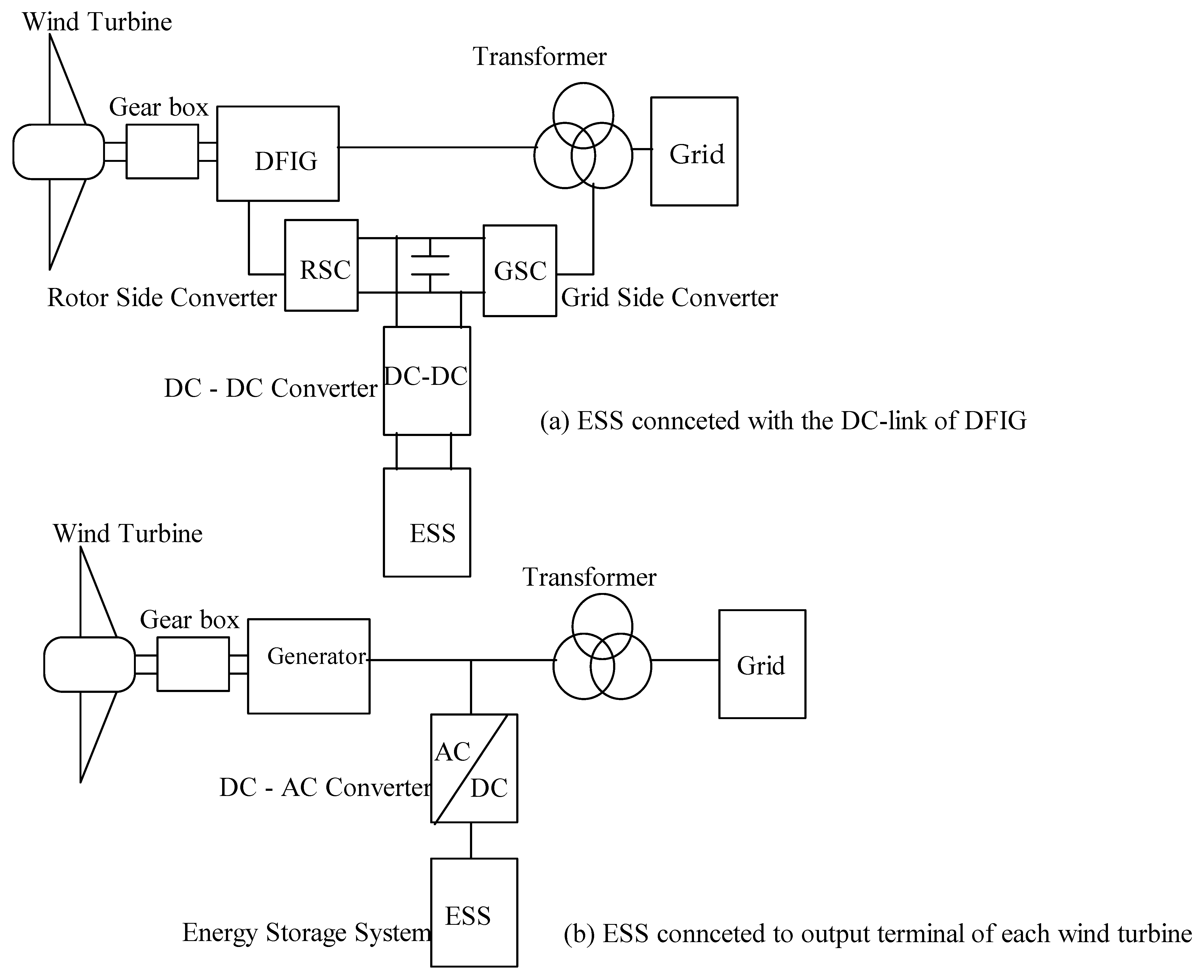
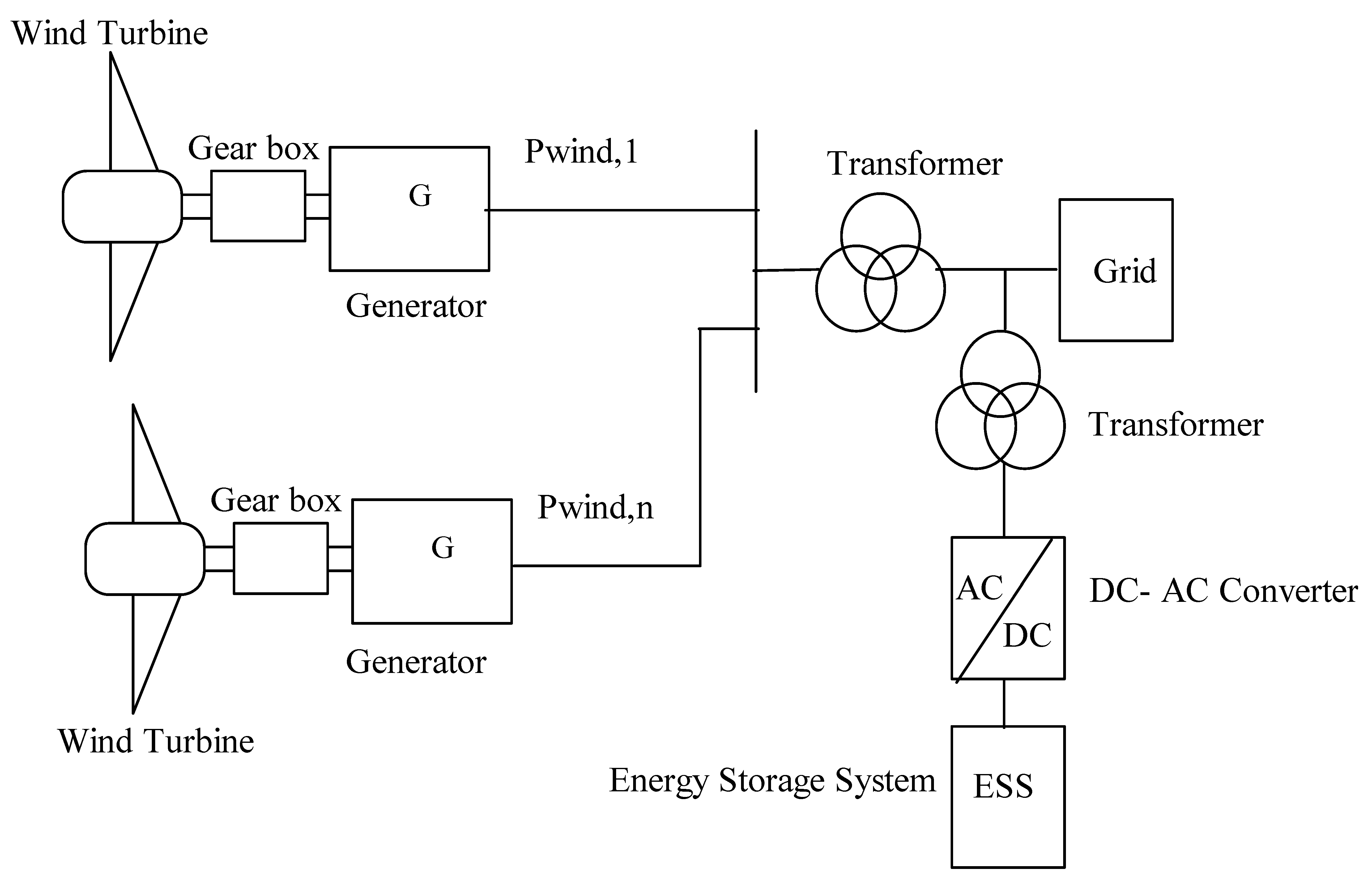
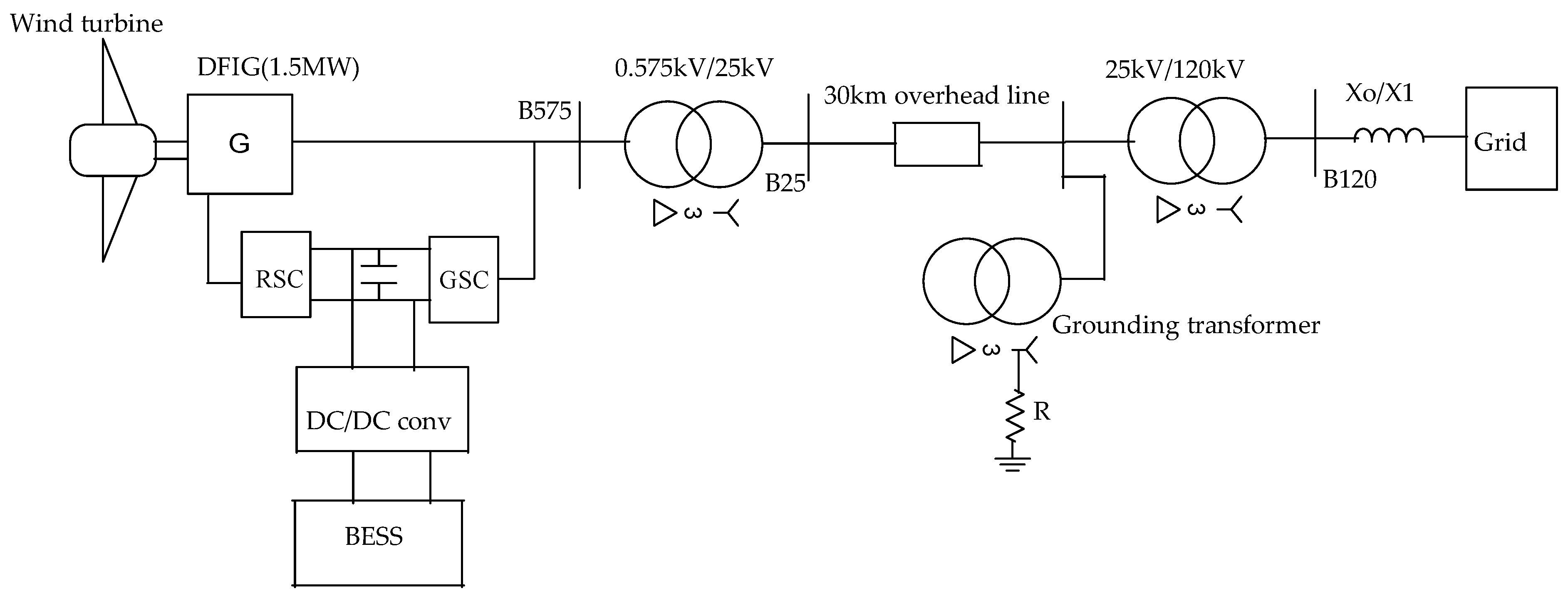
2. System Configuration of a Battery Energy Storage System with DFIG Wind Turbines
- A mechanical wind turbine that can operate at varying wind speeds.
- An induction generator with externally accessible rotor terminals.
- A bidirectional voltage source converter (VSC) ensures power flow control in varying wind conditions.
- An ESS connected to the DC-link.
2.1. Modeling of the DFIG Wind Turbine
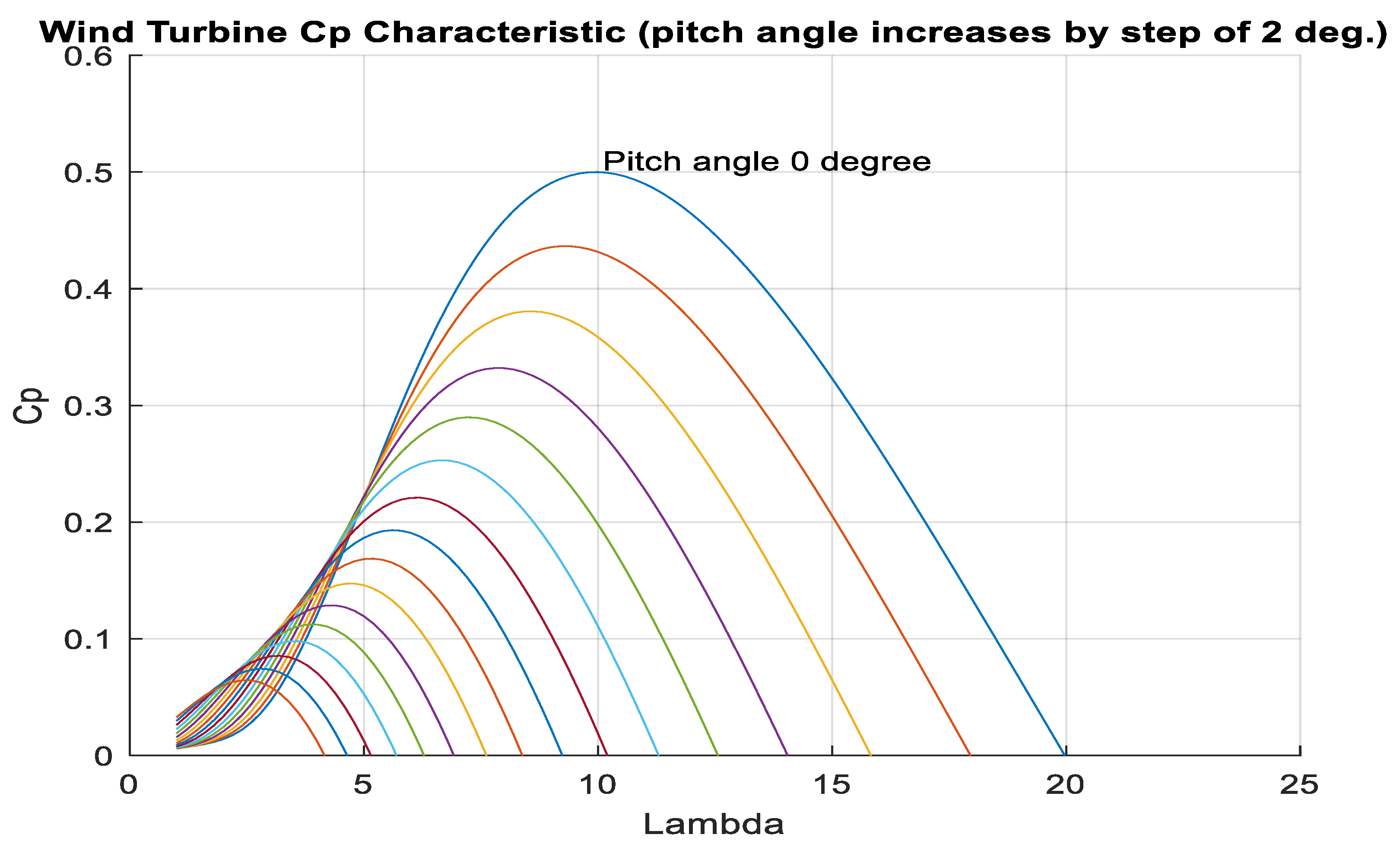
2.1.1. Mechanical System Model
Aerodynamic Rotor
Drive Train
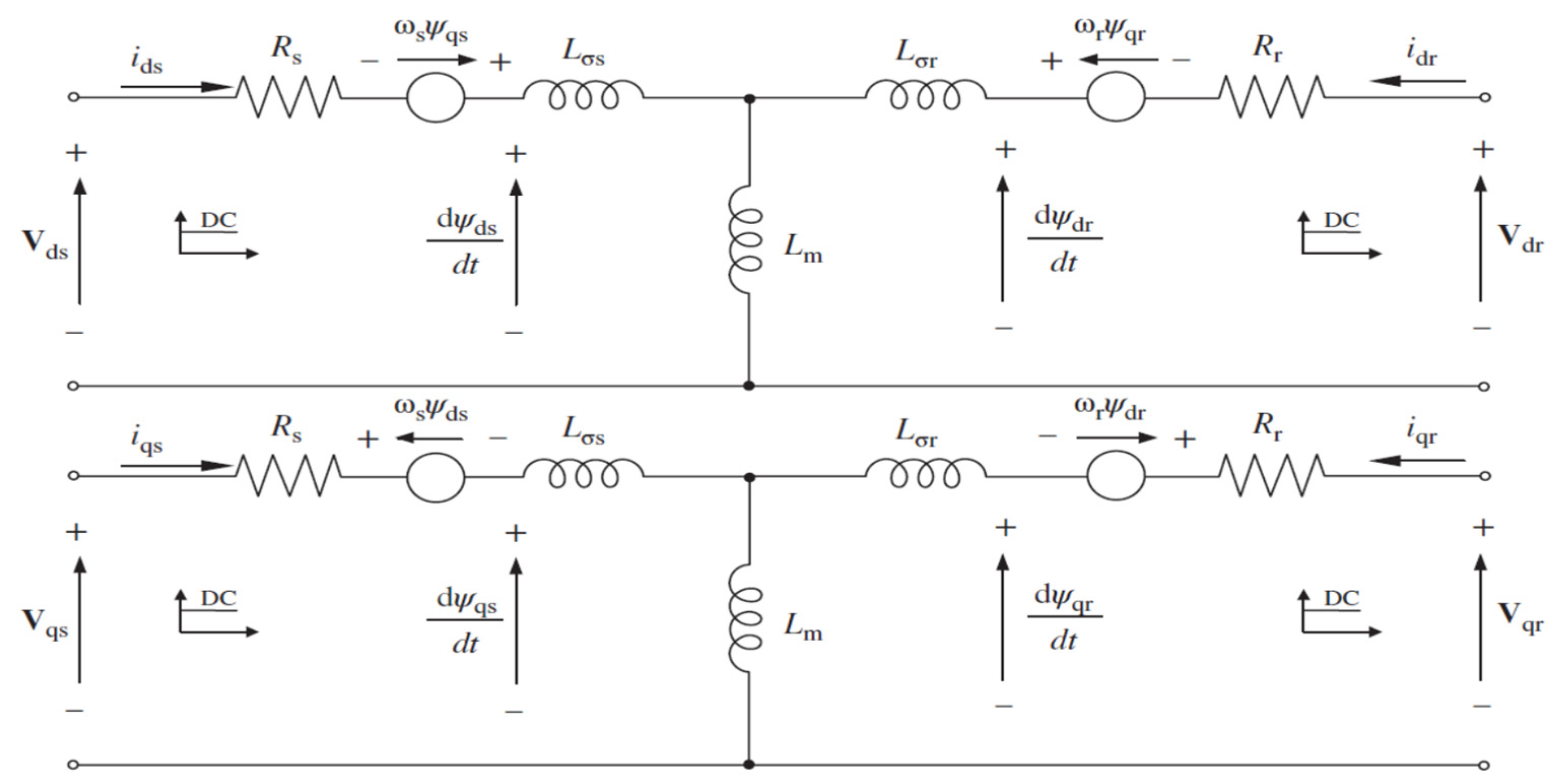
2.1.2. Electrical System Model
DFIG Model
DFIG’s Power Converter
3. Modeling, Sizing, and Control of Battery Energy Storage Systems
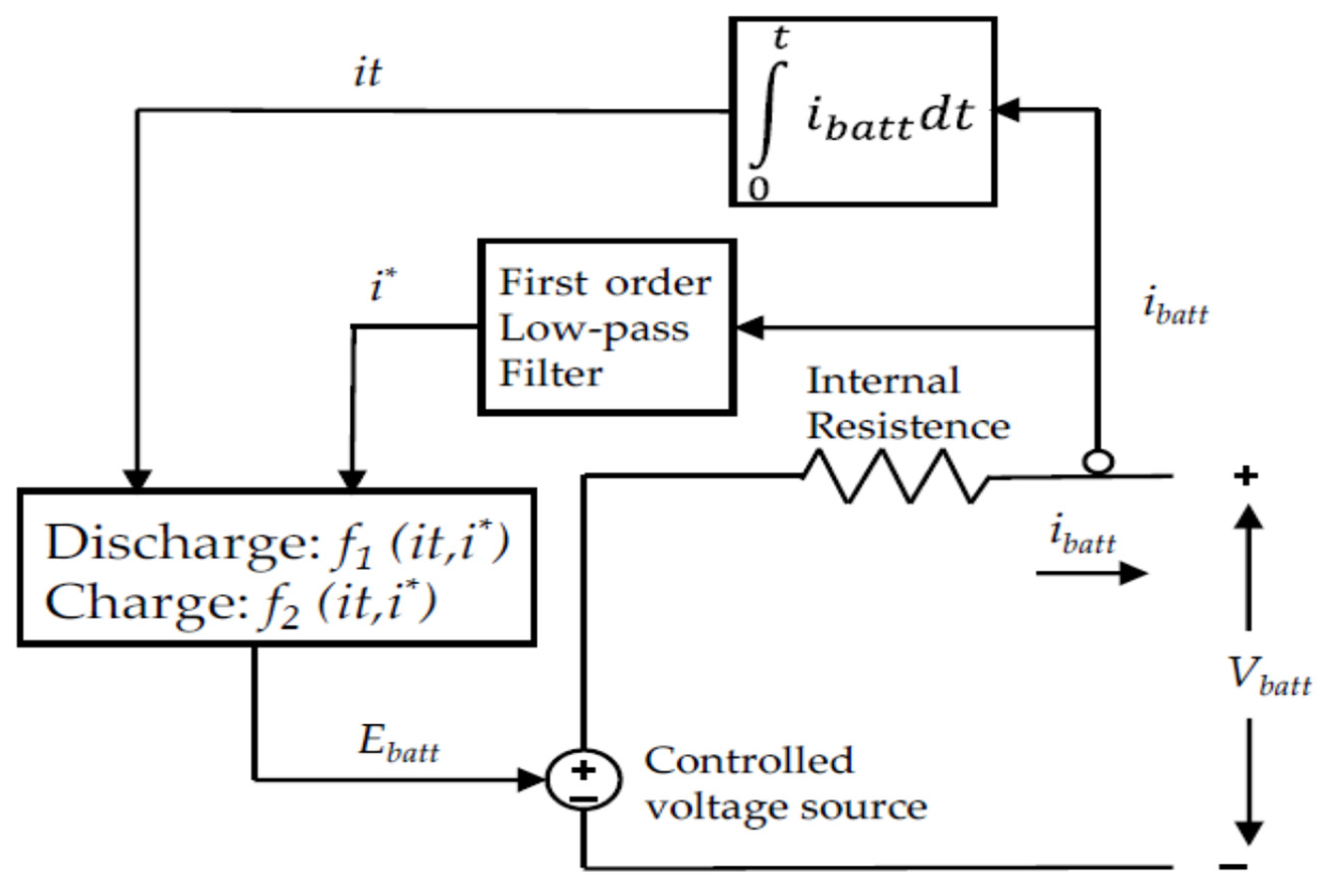
3.1. Battery Modeling
3.1.1. State of Charge
3.1.2. State of Health
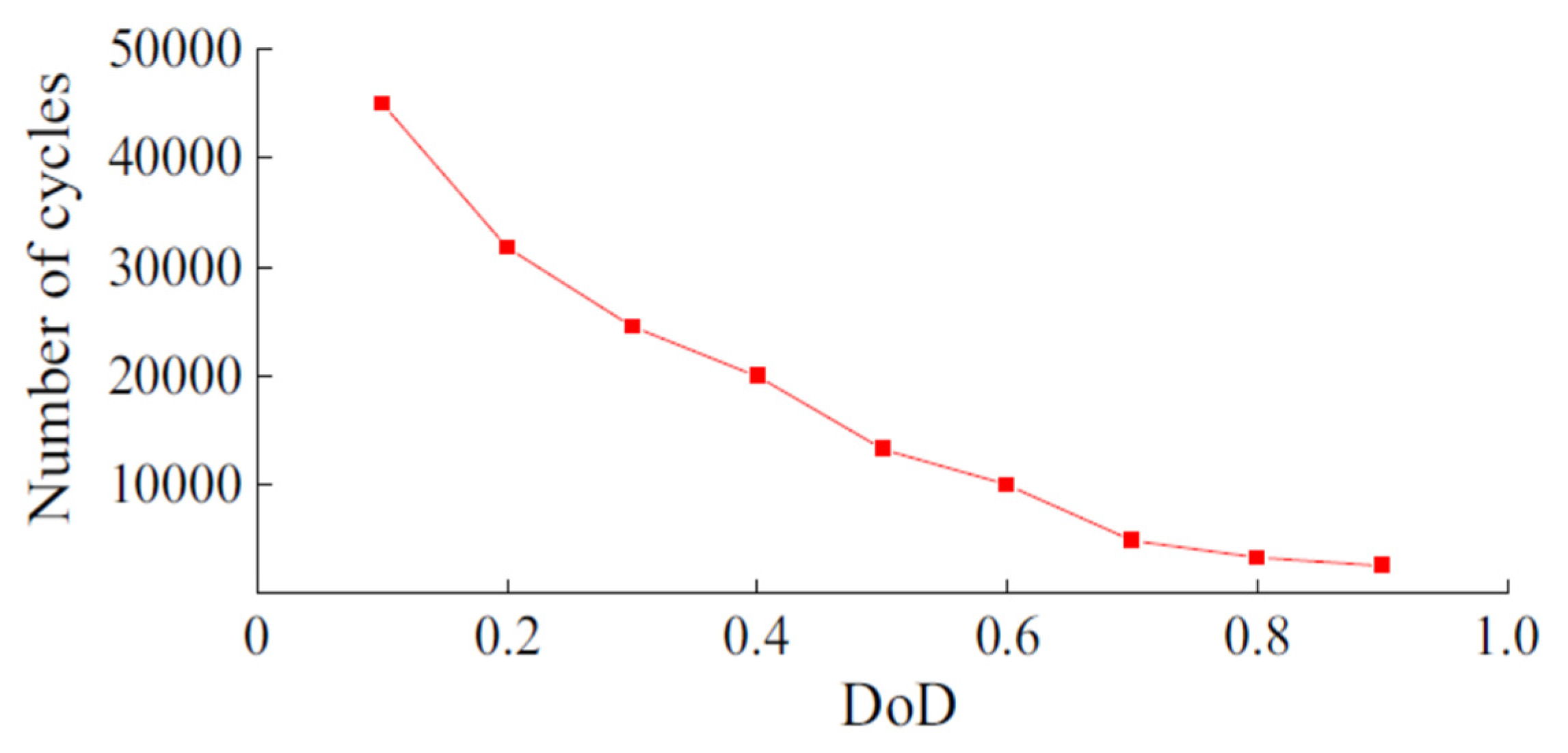
3.1.3. Depth of Discharge
3.2. Battery Sizing
- (1)
- Determine the DFIG’s power rating: Finding out the DFIG’s power rating is the first step in sizing a battery for DFIG output power smoothing. This information can be obtained from the datasheet provided by the manufacturer or by measuring DFIG’s output power.
- (2)
- Determine the power smoothing time: The power smoothing time is the period for which the battery bank will be used to smooth out the output power of the DFIG. This can be determined based on the level of smoothing required and the expected variability of the output power of the DFIG.
- (3)
- Calculate the energy required: Once the DFIG’s power rating and the power smoothing time have been determined, the energy required to smooth out the output power can be calculated using Equation (25).
- (4)
- Determine the maximum and minimum power supply and frequency range of the grid: The battery must be designed to operate within the maximum and minimum power supply and frequency range of the grid. These requirements can vary depending on the location and the grid connection requirements.
- (5)
- Determine the battery voltage level: The battery voltage level must match the voltage level of the grid to ensure efficient and safe operation.
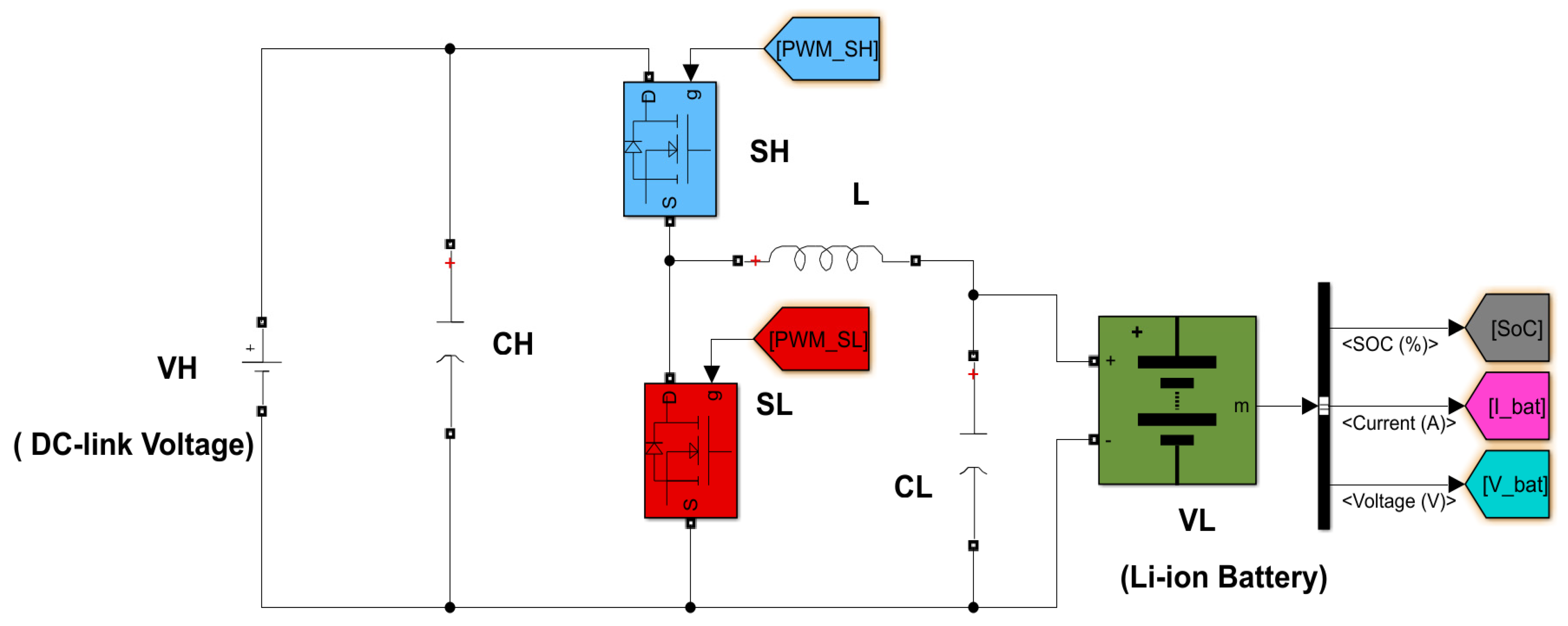
3.3. Modeling a Bidirectional DC-DC Converter for Li-Ion Battery Control
3.3.1. Bidirectional DC-DC Converter Circuit Parameter Design
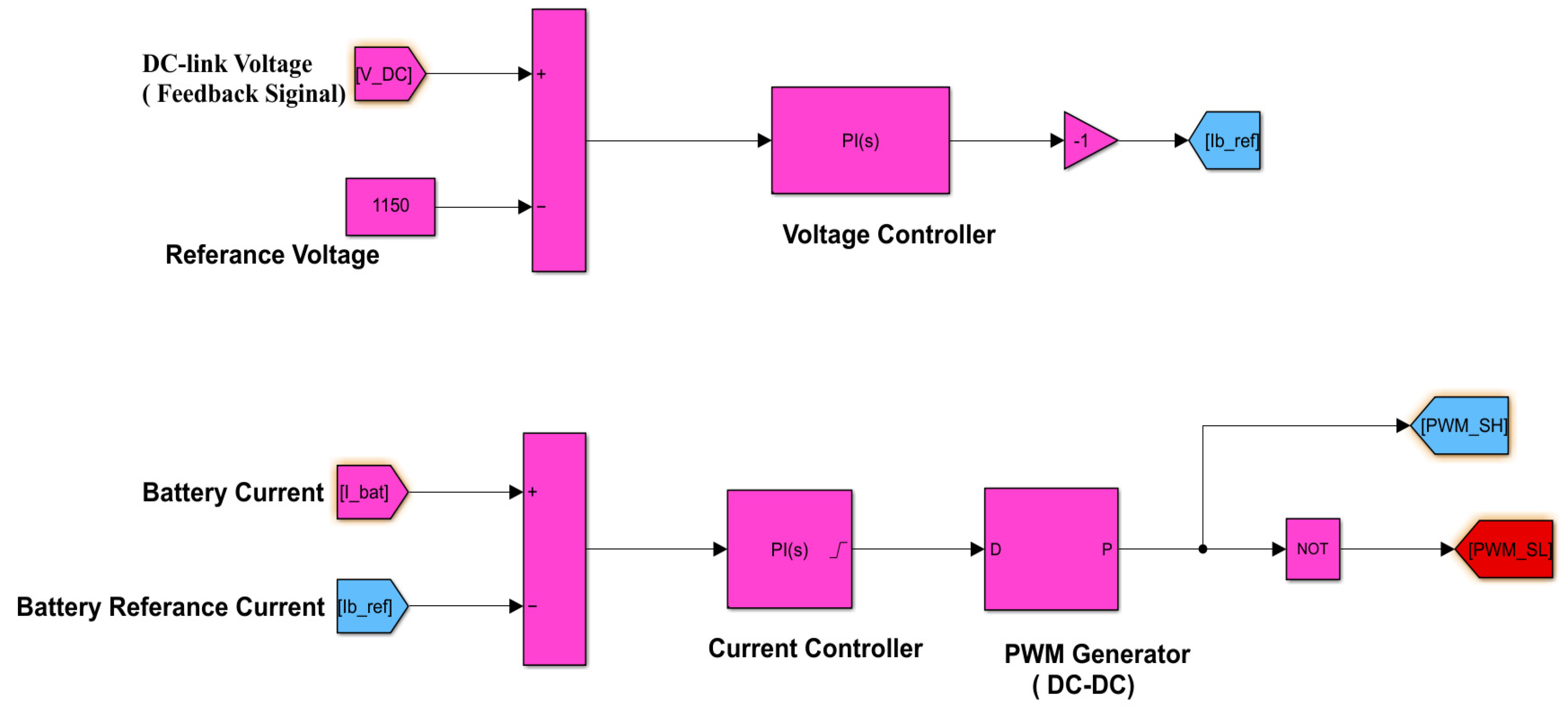
3.3.2. Li-Ion Battery Control with Bidirectional DC-DC Converter Modeling
Li-Ion Battery Charging and Discharging Characteristics
4. System Modeling and Simulation
- (i)
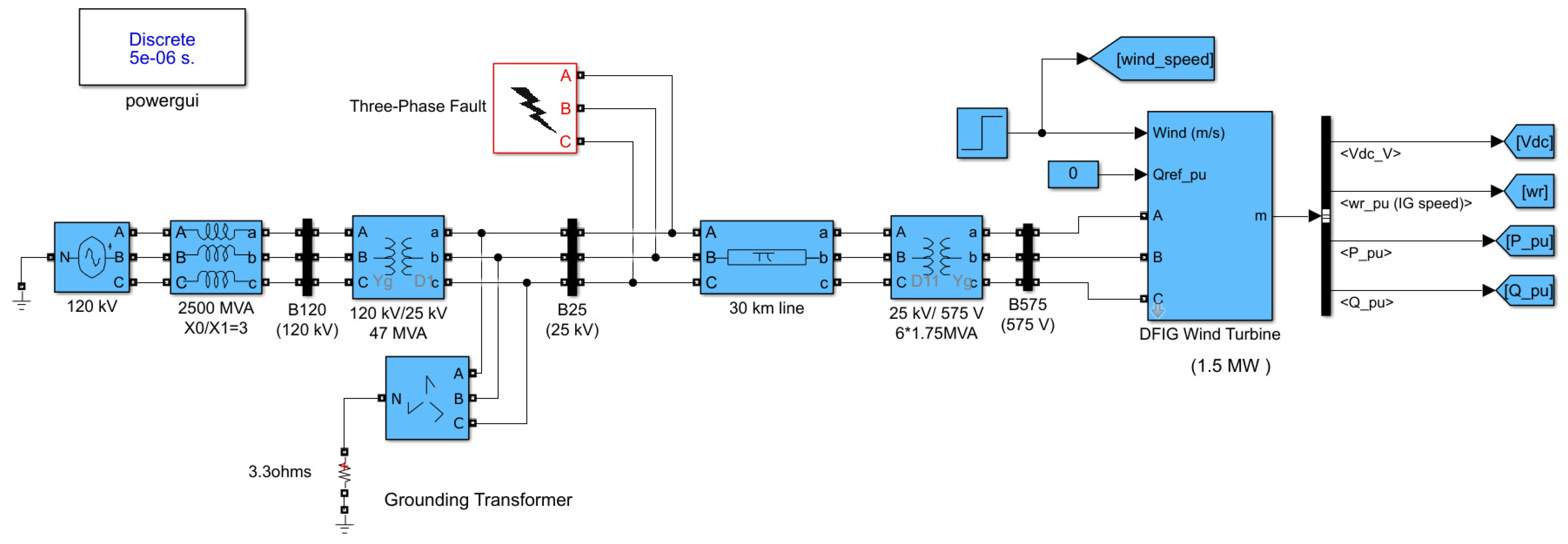
- Steady-State Operation: We first model a grid-connected DFIG wind turbine without a Li-ion battery using a Simulink model. This setup involves applying a stepped variable wind speed to the system model. The purpose is to observe and analyze the behavior of grid-connected DFIG wind turbines when Li-ion batteries are not present.
- (ii)
- Dynamic Transient Operation: This simulation investigates how the active and reactive power of the grid system responds under fault conditions. We introduce a three-phase-to-ground fault at the connection bus between B25 and the transmission line, with the fault cleared after one second. These simulations help us understand the dynamic transient state of the system under varying wind conditions and fault scenarios.
- (iii)
- With Li-ion Battery: Next, we analyze a grid-connected DFIG wind turbine that includes a Li-ion battery within the system, using a Simulink model. Like the previous scenarios, we subject the system to a stepped variable wind speed. This setup allows us to study how the presence of Li-ion batteries impacts the performance of grid-connected DFIG wind turbines under steady-state and dynamic transient conditions.
4.1. Simulation of a DFIG Wind Turbine Model in Simulink: With and without Li-Ion Battery
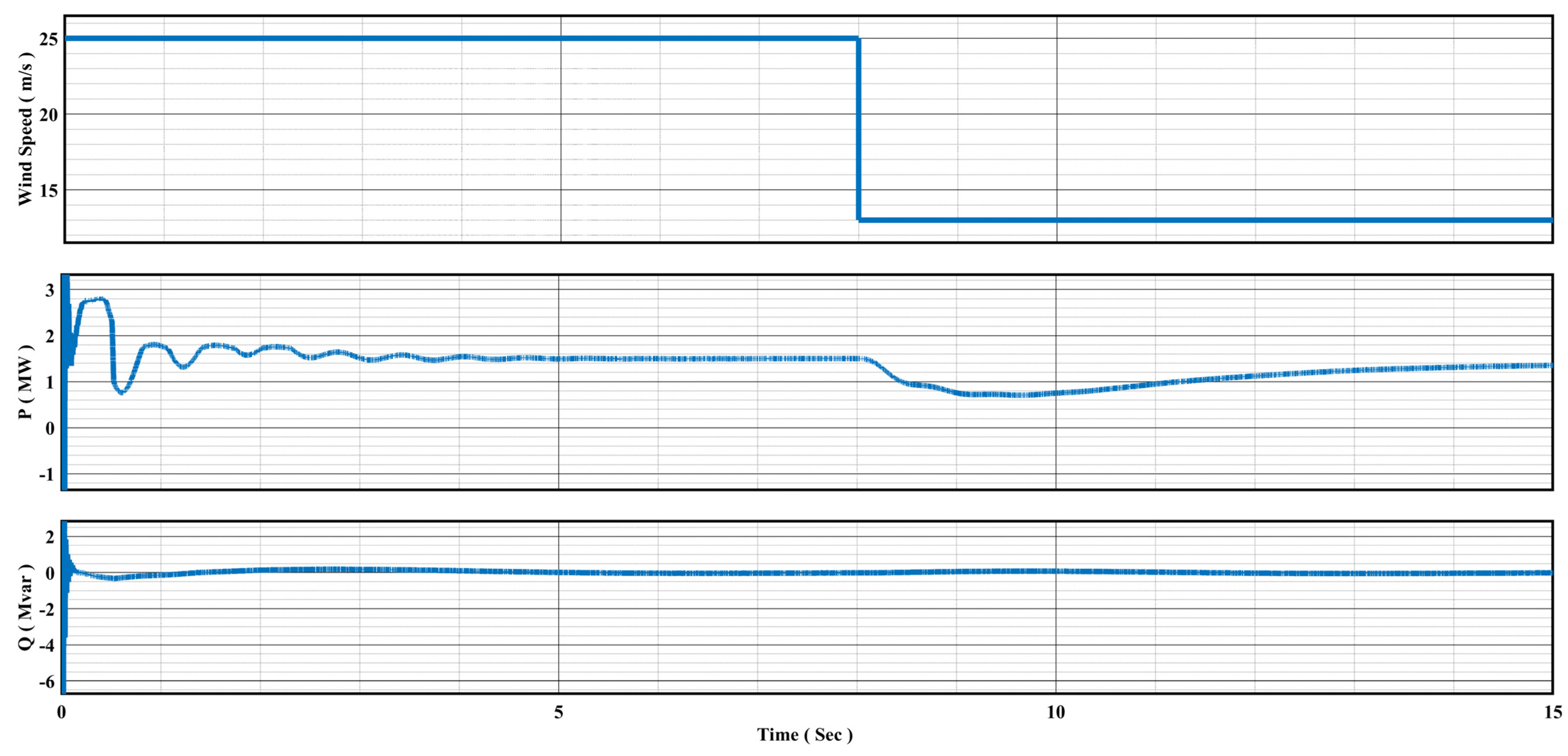
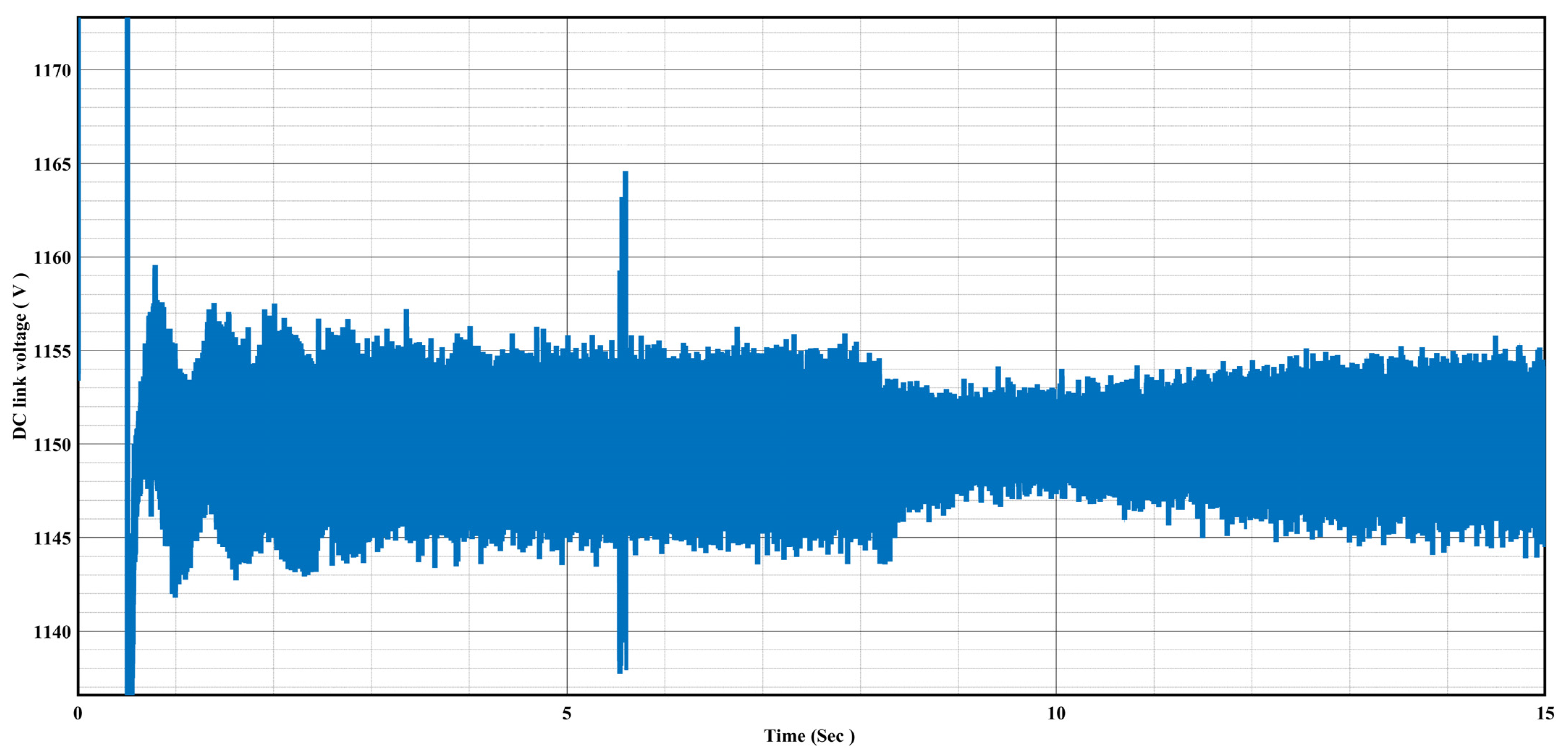
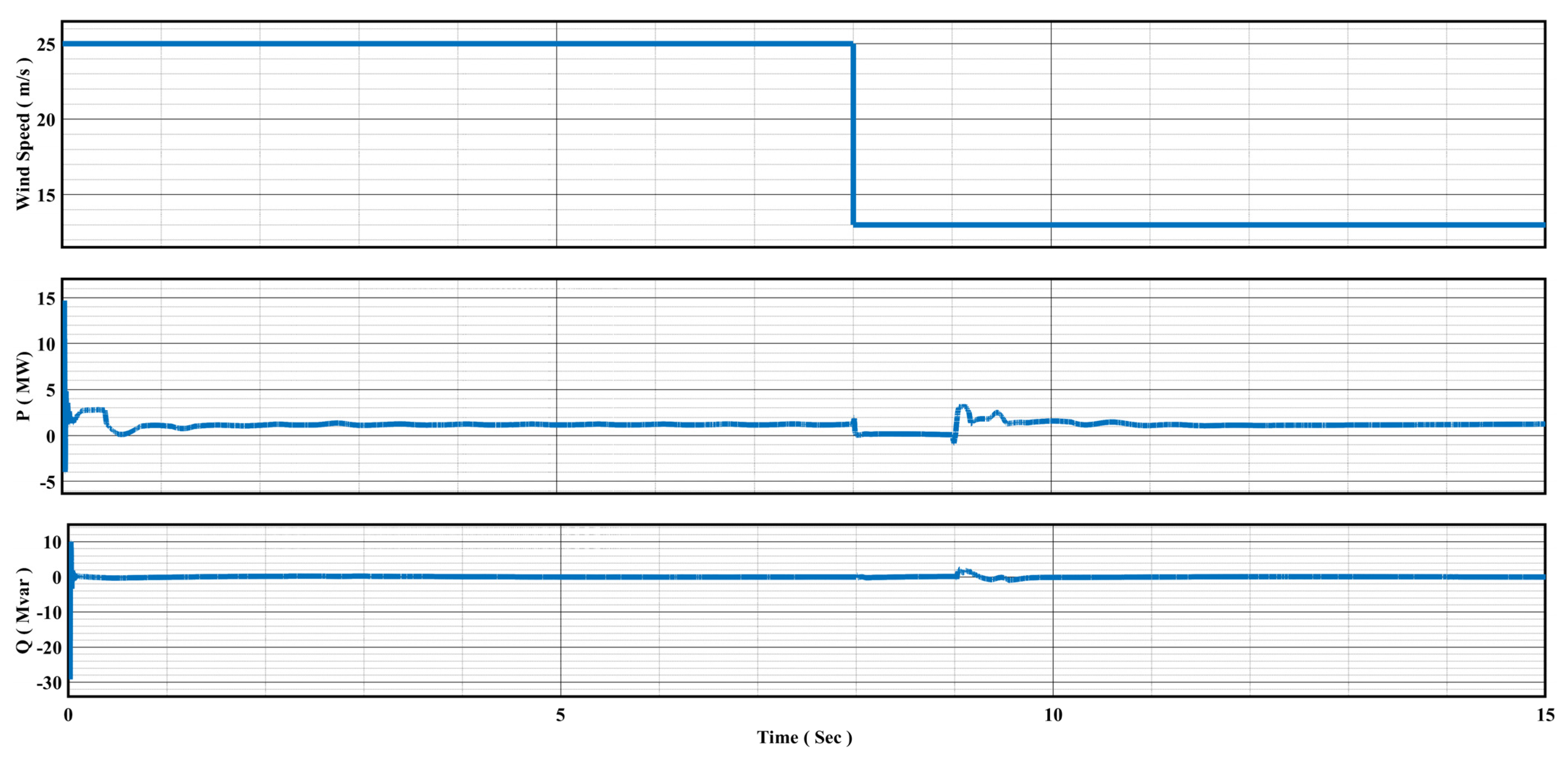
4.1.1. Performance of the DFIG in the Steady-State Condition without a Li-Ion Battery
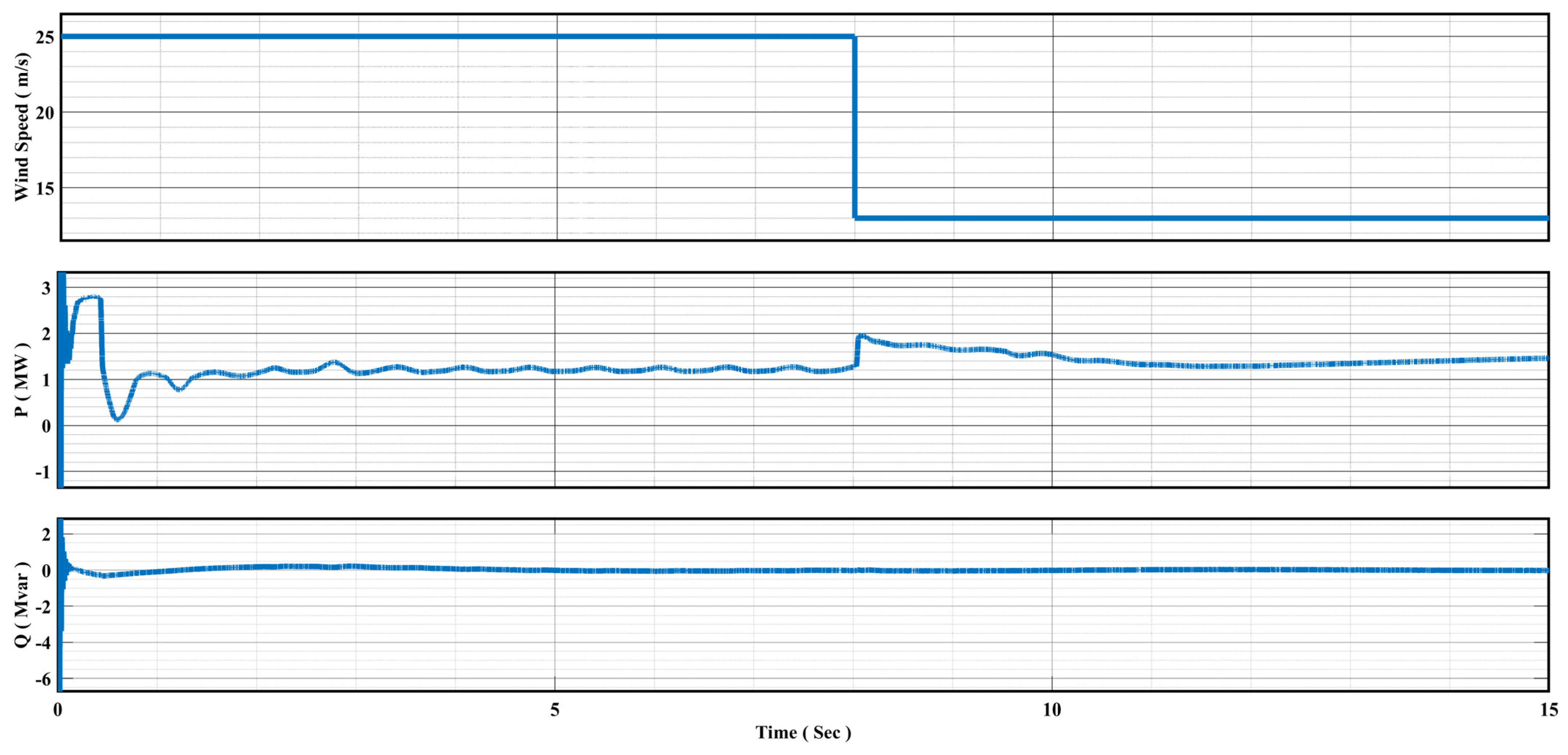
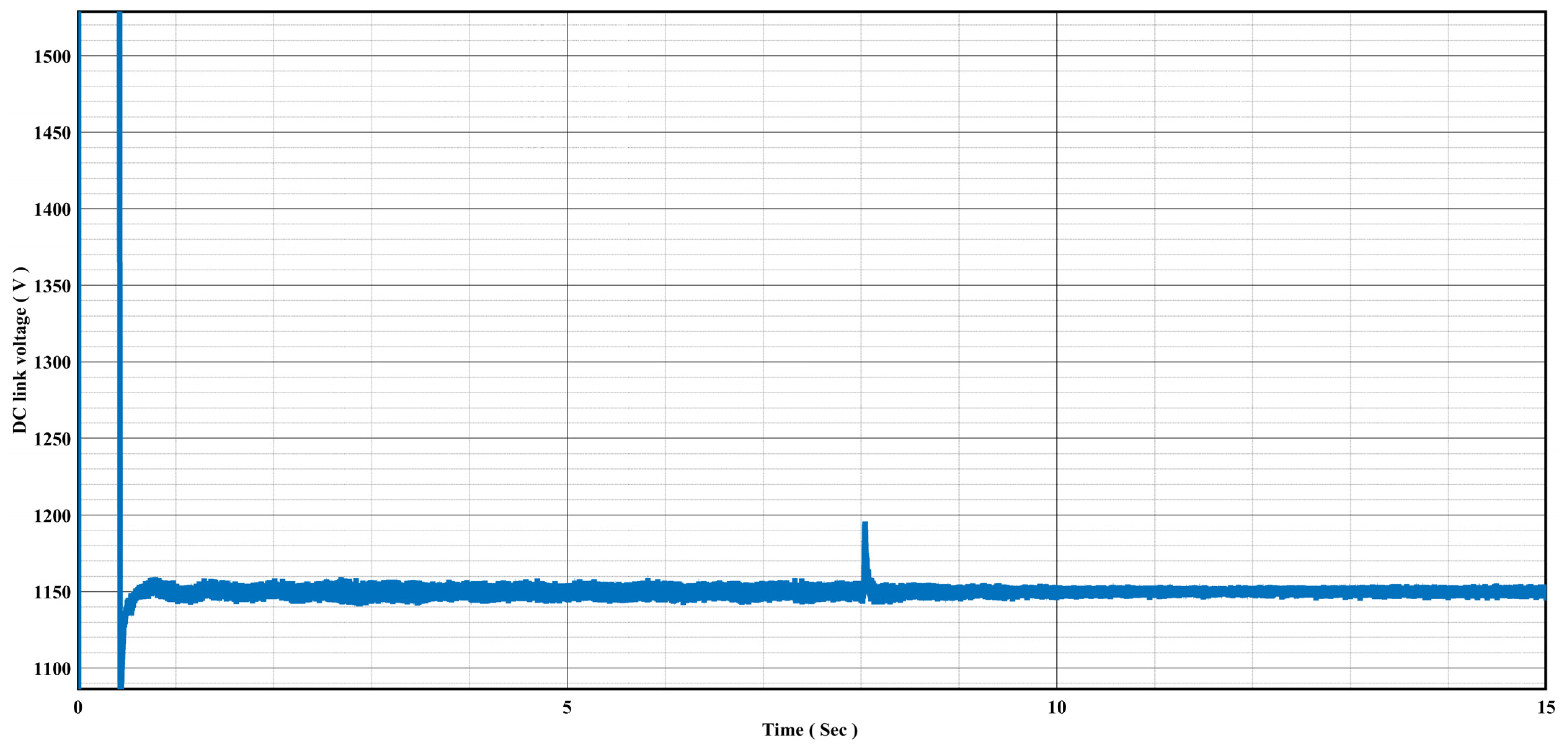
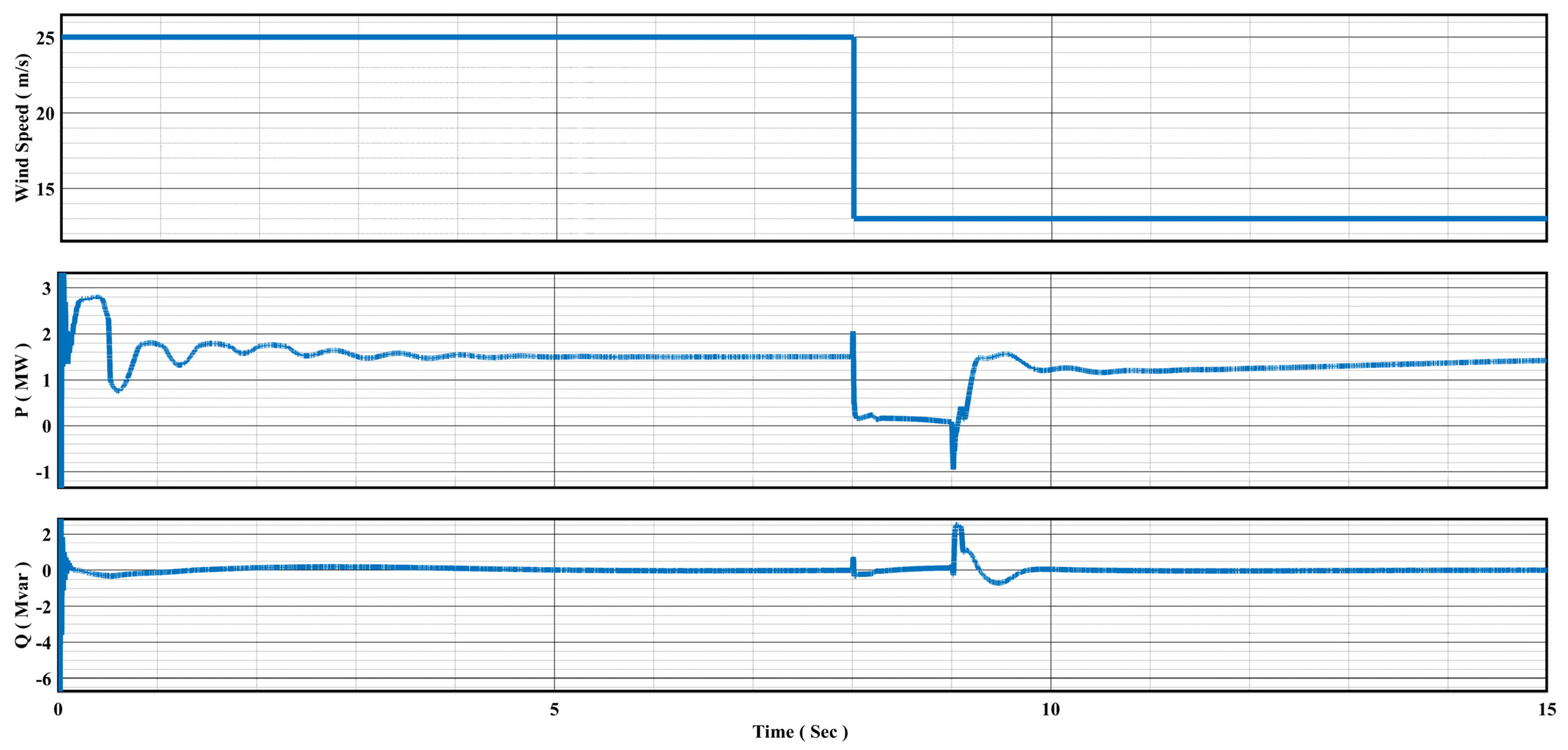
4.1.2. Performance of the DFIG in the Steady-State Condition with a Li-Ion Battery
4.1.3. Performance of the DFIG under Dynamic Transient Conditions without a Li-Ion Battery
4.1.4. Performance of the DFIG under Dynamic Transient Conditions with a Li-Ion Battery
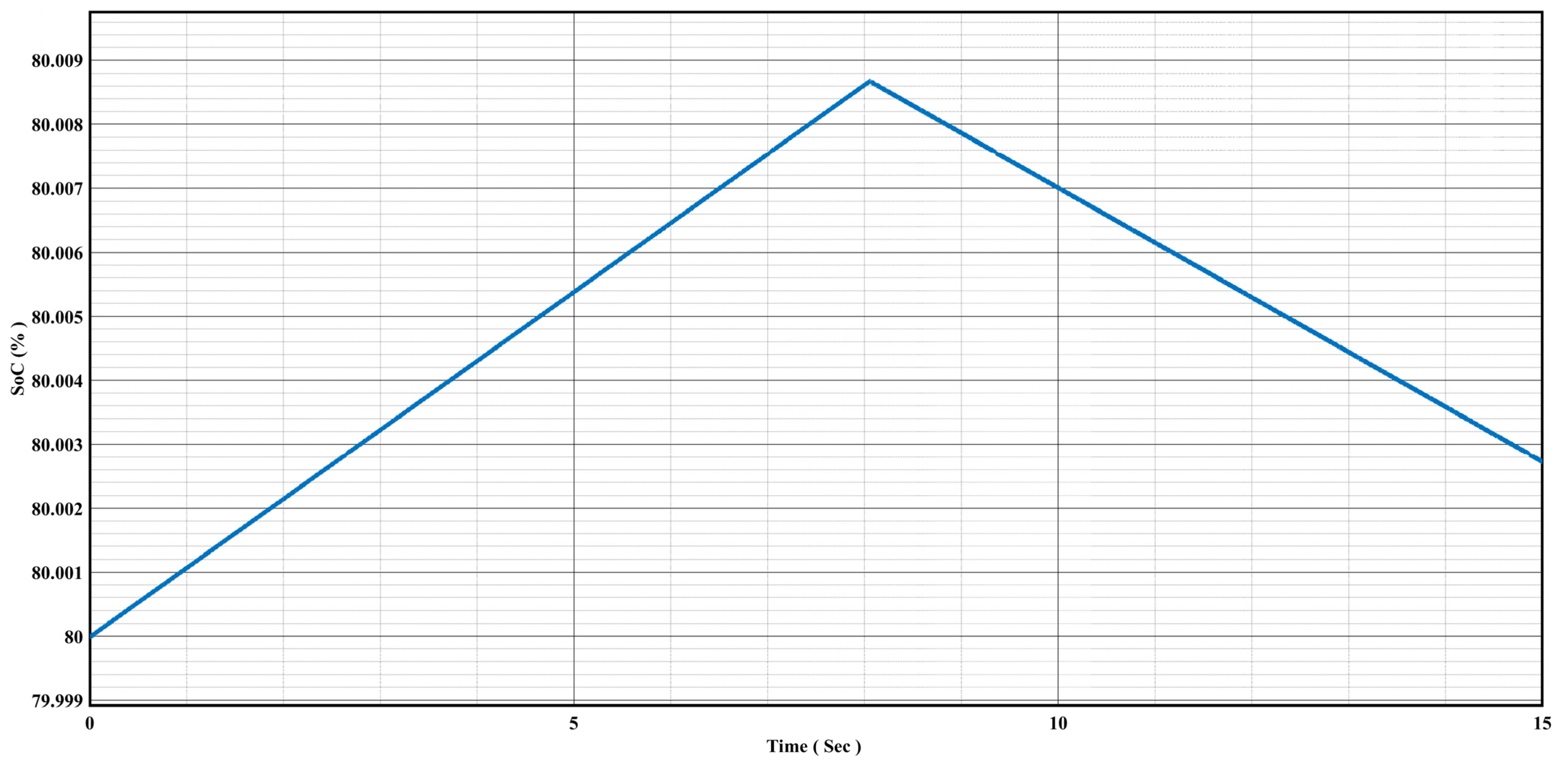
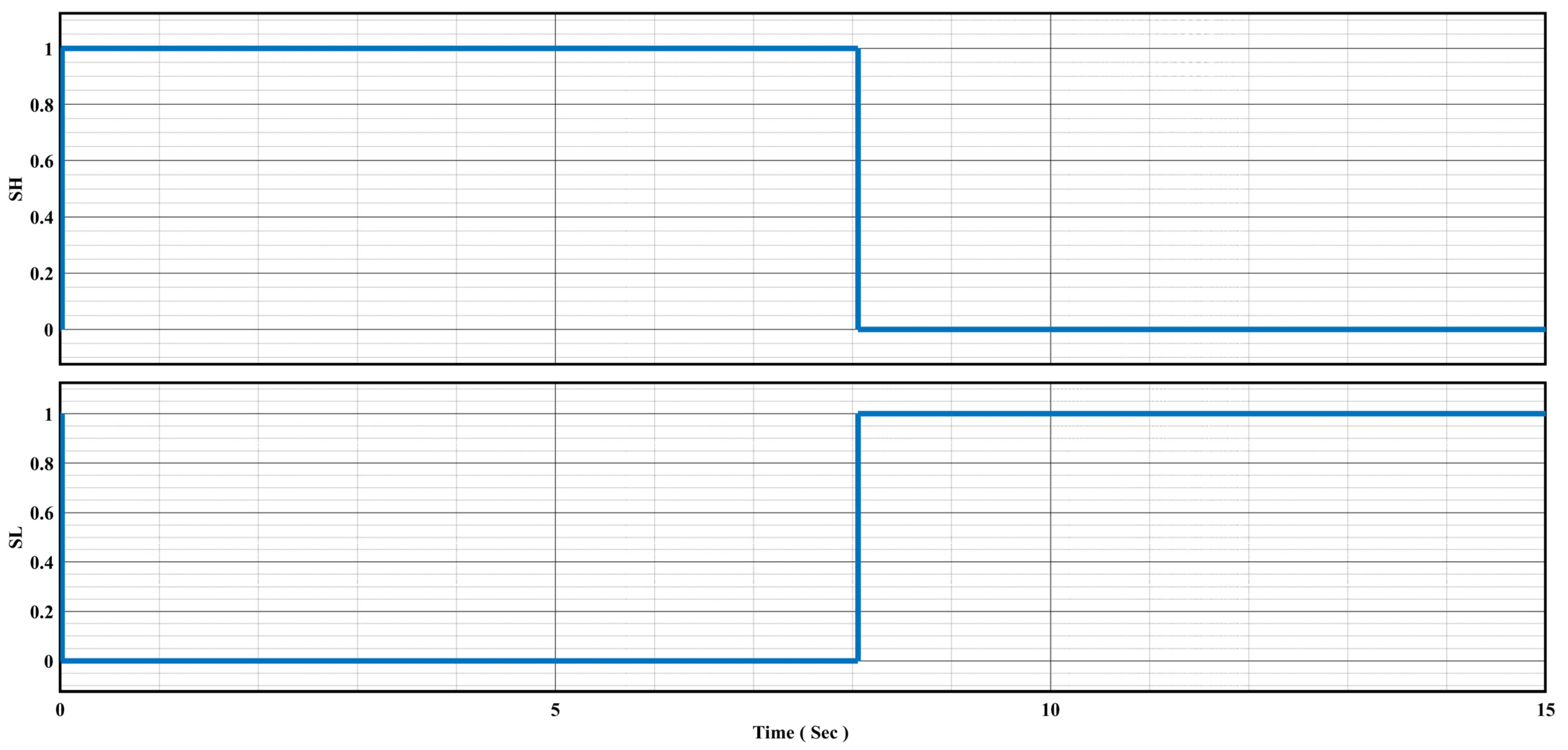
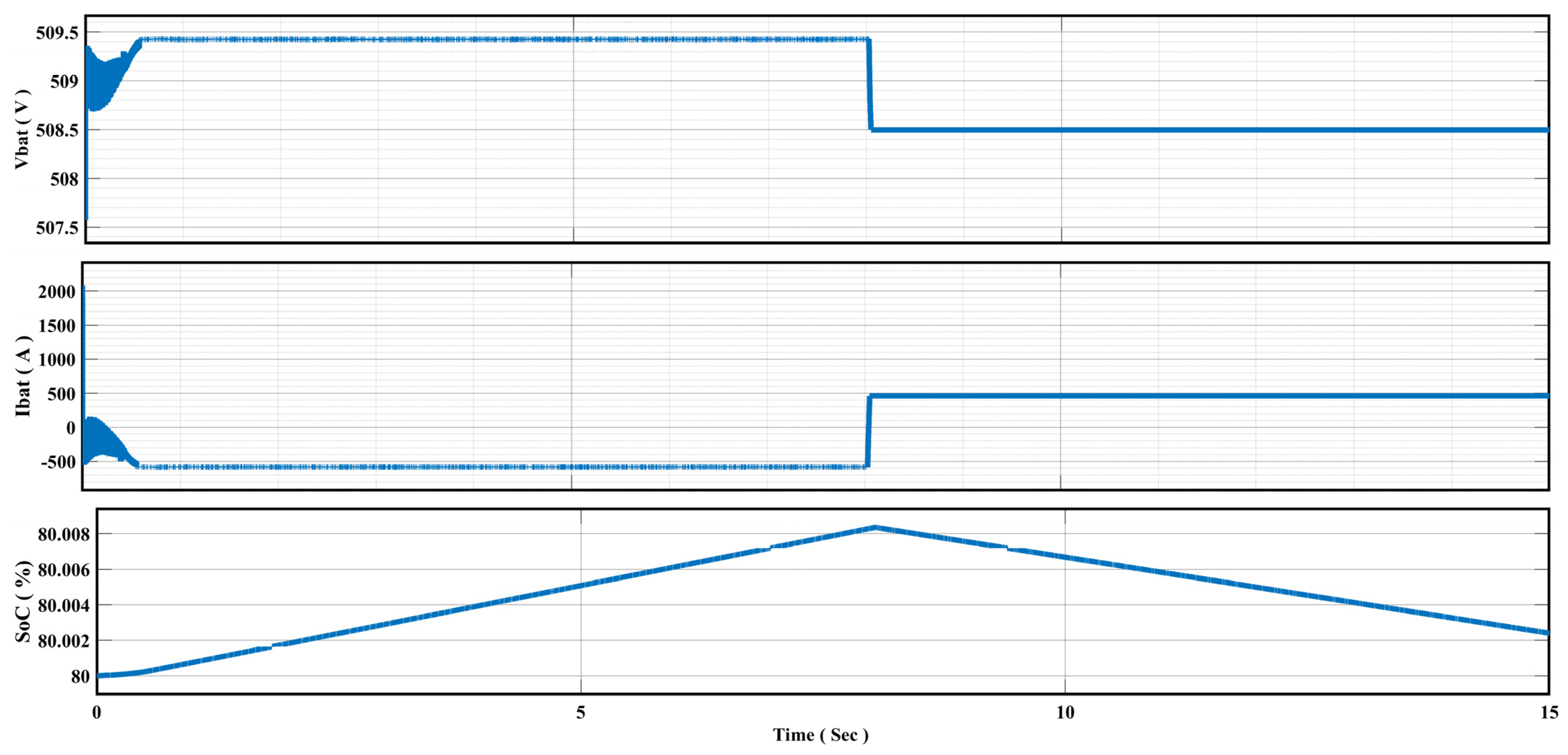
4.1.5. Li-Ion Battery Performance under Charging and Discharging Conditions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. System Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Parameter | Value | Unit |
|---|---|---|---|
| 120 kV grid equivalent | Nominal voltage | 120 | kV |
| Positive sequence phase | 0 | deg | |
| Frequency | 60 | Hz | |
| Three-phase Mutual Inductance Z1-Z0 | Positive sequence inductance(L1) | 0.015 | H |
| Zero-sequence inductance (Lo) | 0.046 | H | |
| Positive sequence resistances (R1) | 0.576 | Ω | |
| Zero sequence resistances (Ro) | 1.728 | Ω | |
| Three-phase transformer (120 KV/25 KV) | Capacity | 47 | MVA |
| Winding one connection (ABC terminals) | Yg | - | |
| Winding two connection (ABC) terminals | Delta(D1) | - | |
| Primary Voltage | 120 | kV | |
| Secondary Voltage | 25 | kV | |
| Frequency | 60 | Hz | |
| Primary resistance (R1) | 0.002 | pu | |
| Primary inductance (L1) | 0.08 | pu | |
| Secondary resistance (R2) | 0.002 | pu | |
| Secondary inductance (L2) | 0.08 | pu | |
| Magnetization resistance (Rm) | 500 | Ω | |
| Magnetization inductance (Lm) | 500 | H | |
| Three-phase transformer (25 KV/575 V) | Capacity | 10.5 | MVA |
| Winding one connection (ABC terminals) | D11 | - | |
| Winding two connection (ABC) terminals | Yg | - | |
| Primary voltage | 25 | kV | |
| Secondary voltage | 575 | V | |
| Frequency | 60 | Hz | |
| Primary resistance (R1) | 0.0008 | pu | |
| Primary inductance (L1) | 0.025 | pu | |
| Secondary resistance (R2) | 0.0008 | pu | |
| Secondary inductance (L2) | 0.025 | pu | |
| Magnetization resistance (Rm) | 500 | Ω | |
| Magnetization inductance (Lm) | 500 | H | |
| Grounding transformer | Capacity | 100 | MVA |
| Nominal voltage (Vn) | 25 | kV | |
| Frequency | 60 | Hz | |
| Zero sequence resistance (Ro) | 0.025 | pu | |
| Zero sequence reactance (Xo) | 0.75 | pu | |
| Magnetization resistance (Rm) | 500 | Ω | |
| Magnetization reactance (Xo) | 500 | Ω | |
| Feeder (three-phase PI section line) | Positive sequence resistance (R1) | 0.1153 | Ω/km |
| Zero sequence resistance (Ro) | 0.413 | Ω/km | |
| Positive sequence inductance (L1) | 1.05 × 10−3 | Ω/km | |
| Zero sequence inductance (Lo) | 3.32 × 10−3 | Ω/km | |
| Positive sequence capacitance (C1) | 11.33 × 10−9 | Ω/km | |
| Zero sequence capacitance (Co) | 5.01 × 10−9 | Ω/km | |
| length | 30 | km | |
| The frequency used for RLC | 60 | Hz | |
| Bus 575 | The nominal voltage used for pu | 575 | V |
| Base power (3-phase) | 10 | MVA | |
| Bus B25 | The nominal voltage used for pu | 25 | KV |
| Base power (3-phase) | 10 | MVA | |
| Bus B120 | The nominal voltage used for pu | 120 | KV |
| Base power (3-phase) | 10 | MVA |
| Parameters | Value | Unit |
|---|---|---|
| Generator data | ||
| Capacity | 10 | MVA |
| Nominal voltage (L-L) | 575 Vrms | V |
| Frequency | 60 | Hz |
| Stator resistance (Rs) | 0.023 | pu |
| Stator inductance (Lls) | 0.18 | pu |
| Rotor resistance (Rr’) | 0.016 | pu |
| Rotor inductance (Llr’) | 0.16 | pu |
| Magnetizing inductance (Lm) | 2.9 | pu |
| Generator inertia constant (H) | 0.685 | s |
| Pole pairs | 3 | p |
| Friction factor | 0.01 | pu |
| Turbine data | ||
| Nominal mechanical output power | 1.5 | MW |
| Wind speed at nominal speed | 11 | m/s |
| Initial wind speed | 11 | m/s |
| Converters data | ||
| Grid-side converter maximum current | 0.8 | pu |
| Grid-side coupling inductor (L) | 0.3 | pu |
| Grid-side coupling resistor (R) | 0.003 | pu |
| Nominal DC bus voltage | 1150 | V |
| DC bus capacitor | 100,000 × 10−6 | F |
| Line filter capacitor | 120 × 103 | var |
| Drive train data | ||
| Wind turbine inertia constant (H) | 4.32 | s |
| Shaft spring constant referring to high-speed shaft | 1.11 | pu |
| Shaft mutual damping | 1.5 | pu |
| Turbine initial speed | 1.2 | pu |
| Initial output torque | 0.83 | pu |
| Control parameters | ||
| DC voltage regulator gain (kp) | 8 | - |
| DC voltage regulator gain (ki) | 400 | - |
| Grid-side converter current regulator gain(kp) | 0.83 | - |
| Grid-side converter current regulator gain(ki) | 5 | - |
| Speed regulator gain (kp) | 3 | - |
| Speed regulator gain (ki) | 0.6 | - |
| Rotor-side converter regulator gain (kp) | 0.6 | - |
| Rotor-side converter regulator gain (ki) | 8 | - |
| Reactive power regulator gain (ki_var) | 0.05 | - |
| Voltage regulator gain (ki_volt) | 20 | - |
| Pitch controller gain (kp) | 150 | - |
| Pitch compensation gain (kp) | 3 | - |
| Pitch compensation gain (ki) | 30 | - |
| Frequency of the grid-side PWM carrier | 2700 | Hz |
| Frequency of the rotor-side PWM carrier | 1620 | Hz |
| Maximum pitch angle | 27 | degree |
| Maximum rate of change in pitch angle | 10 | deg/s |
References
- IRENA. Renewable Energy Capacity Highlights. 2021. Available online: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2021/Apr/IRENA_-RE_Capacity_Highlights_2021.pdf?la=en&hash=1E133689564BC40C2392E85026F71A0D7A9C0B91 (accessed on 20 December 2022).
- Vijayakumar, K.; Kumaresan, N.; Gounden, N.G.A.; Tennakoon, S.B. Real and reactive power control of hybrid excited wind-driven grid-connected doubly fed induction generators. IET Power Electron. 2013, 6, 1197–1208. [Google Scholar] [CrossRef]
- Chhipą, A.A.; Chakrabarti, P.; Bolshev, V.; Chakrabarti, T.; Samarin, G.; Vasilyev, A.N.; Ghosh, S.; Kudryavtsev, A. Modeling and Control Strategy of Wind Energy Conversion System with Grid-Connected Doubly-Fed Induction Generator. Energies 2022, 15, 6694. [Google Scholar] [CrossRef]
- Sarita, K.; Devarapalli, R.; Rai, P. Modeling and control of dynamic battery storage system used in hybrid grid. Energy Storage 2020, 2, e146. [Google Scholar] [CrossRef]
- Behabtu, H.A.; Coosemans, T.; Berecibar, M.; Fante, K.A.; Kebede, A.A.; Van Mierlo, J.; Messagie, M. Performance Evaluation of Grid-Connected Wind Turbine Generators. Energies 2021, 14, 6807. [Google Scholar] [CrossRef]
- Abo-khalil, A.G. Grid Connection Control of DFIG in Variable Speed Wind Turbines under Turbulent Conditions. Int. J. Renew. Energy Res. 2019, 9, 1260–1271. [Google Scholar]
- Riouch, T.; El-Bachtiri, R. A coordinated control for smoothing output power of a DFIG based wind turbine. In Proceedings of the 2013 International Renewable and Sustainable Energy Conference (IRSEC), Quarzazate, Morocco, 7–9 March 2013; pp. 304–309. [Google Scholar]
- Masaud, T. Modeling, Analysis, Control and Design Application Guidelines of Doubly Fed Induction Generator (DFIG) for Wind Power Applications. 2013. Available online: https://www.proquest.com/docview/1444319883 (accessed on 13 April 2022).
- Esmaili, A.; Nasiri, A. Power smoothing and power ramp control for wind energy using energy storage. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 922–927. [Google Scholar]
- Chen, T.-H.; Liao, R.-N.; Yang, C.-Y.; Chiang, Y.-H. Application of Grid-Level Battery Energy Storage System to Wind Power Fluctuation Smoothing. J. Clean Energy Technol. 2015, 4, 201–204. [Google Scholar] [CrossRef]
- Gwabavu, M.; Raji, A. Dynamic Control of Integrated Wind Farm Battery Energy Storage Systems for Grid Connection. Sustainability 2021, 13, 3112. [Google Scholar] [CrossRef]
- Kook, K.S.; McKenzie, K.; Liu, Y.; Atcitty, S. A study on applications of energy storage for the wind power operation in power systems. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 1–5. [Google Scholar]
- Wei, Z.; Moon, B.Y.; Joo, Y.H. Smooth Wind Power Fluctuation Based on Battery Energy Storage System for Wind Farm. J. Electr. Eng. Technol. 2014, 9, 2134–2141. [Google Scholar] [CrossRef]
- Zeng, J.; Zhang, B.; Mao, C.; Wang, Y. Use of Battery Energy Storage System to Improve the Power Quality and Stability of Wind Farms. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–6. [Google Scholar]
- Hennessy, T.; Kuntz, M. The multiple benefits of integrating electricity storage with wind energy. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 12–16 June 2005; Volume 2, pp. 1952–1953. [Google Scholar]
- Jiang, Z.; Yu, X. Modeling and control of an integrated wind power generation and energy storage system. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–8. [Google Scholar]
- Behabtu, H.A.; Messagie, M.; Coosemans, T.; Berecibar, M.; Anlay Fante, K.; Kebede, A.A.; Mierlo, J.V. A Review of Energy Storage Technologies’ Application Potentials in Renewable Energy Sources Grid Integration. Sustainability 2020, 12, 10511. [Google Scholar] [CrossRef]
- Amrouche, S.O.; Rekioua, D.; Rekioua, T.; Bacha, S. Overview of energy storage in renewable energy systems. Int. J. Hydrog. Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Belfedhal, S.A.; Berkouk, E.M.; Meslem, Y.; Soufi, Y. Modeling and control of wind power conversion system with a flywheel energy storage system and compensation of reactive power. Int. J. Renew. Energy Res. 2012, 2, 528–534. [Google Scholar]
- Šćekić, L.; Mujović, S.; Radulović, V. Pumped Hydroelectric Energy Storage as a Facilitator of Renewable Energy in Liberalized Electricity Market. Energies 2020, 13, 6076. [Google Scholar] [CrossRef]
- Yang, Y.; Han, Y.; Jiang, W.; Zhang, Y.; Xu, Y.; Ahmed, A.M. Application of the Supercapacitor for Energy Storage in China: Role and Strategy. Appl. Sci. 2022, 12, 354. [Google Scholar] [CrossRef]
- Aghatehrani, R.; Kavasseri, R.; Thapa, R.C. Power smoothing of the DFIG wind turbine using a small energy storage device. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–6. [Google Scholar]
- Nielsen, K.E.; Molinas, M. Superconducting Magnetic Energy Storage (SMES) in power systems with renewable energy sources. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics (ISIE 2010), Bari, Italy, 4–7 July 2010; pp. 2487–2492. [Google Scholar]
- Shi, J.; Tang, Y.; Ren, L.; Li, J.; Chen, S. Application of SMES in wind farm to improve voltage stability. Phys. C 2008, 468, 2100–2103. [Google Scholar] [CrossRef]
- Ibrahim, H.; Belmokhtar, K.; Ghandour, M. Investigation of Usage of Compressed Air Energy Storage for Power Generation System Improving—Application in a Microgrid Integrating Wind Energy. Energy Procedia 2015, 73, 305–316. [Google Scholar] [CrossRef]
- Castellani, B.; Morini, E.; Nastasi, B.; Nicolini, A.; Rossi, F. Small-Scale Compressed Air Energy Storage Application for Renewable Energy Integration in a Listed Building. Energies 2018, 11, 1921. [Google Scholar] [CrossRef]
- Mesbahi, T.; Ouari, A.; Ghennam, T.; Berkouk, E.M.; Rizoug, N.; Mesbahi, N.; Meradji, M. A stand-alone wind power supply with a Li-ion battery energy storage system. Renew. Sustain. Energy Rev. 2014, 40, 204–213. [Google Scholar] [CrossRef]
- Kawakami, N.; Iijima, Y.; Fukuhara, M.; Bando, M.; Sakanaka, Y.; Ogawa, K.; Matsuda, T. Development and field experiences of stabilization system using 34MW NAS batteries for a 51MW wind farm. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 2371–2376. [Google Scholar]
- Xu, X.; Bishop, M.; Donna, O.; Chen, H. Application and modeling of battery energy storage in power systems. CSEE J. Power Energy Syst. 2016, 2, 82–90. [Google Scholar] [CrossRef]
- Deng, Z.; Xu, Y.; Gu, W.; Fei, Z. Finite-time convergence robust control of battery energy storage system to mitigate wind power fluctuations. Int. J. Electr. Power Energy Syst. 2017, 91, 144–154. [Google Scholar] [CrossRef]
- Silva, C.F.; De Jesus, J.M.F. A Model of a Battery Energy Storage System for Power Systems Stability Studies. 2020, pp. 1–8. Available online: https://fenix.tecnico.ulisboa.pt/downloadFile/1689244997255585/Celso_jrnl.pdf (accessed on 21 June 2022).
- Ganthia, B.P.; Suriyakrishnaan, K.; Prakash, N.; Harinarayanan, J.; Thangaraj, M.; Mishra, S. Comparative Analysis on Various Types of Energy Storage Devices for Wind Power Generation. J. Phys. Conf. Ser. 2022, 2161, 012066. [Google Scholar] [CrossRef]
- Lu, S.; Yin, Z.; Liao, S.; Yang, B.; Liu, S.; Liu, M. An asymmetric encoder—Decoder model for Zn-ion battery lifetime prediction. Energy Rep. 2022, 8, 33–50. [Google Scholar] [CrossRef]
- Wu, G.; Yoshida, Y.; Minakawa, T. Mitigation of Wind Power Fluctuation by Combined Use of Energy Storages with Different Response Characteristics. Energy Procedia 2011, 12, 975–985. [Google Scholar] [CrossRef]
- Marinelli, M.; Morini, A.; Silvestro, F. Modeling of DFIG Wind Turbine and Lithium Ion Energy Storage System. In Proceedings of the 2010 Complexity in Engineering (COMPENG), Rome, Italy, 22–24 February 2010; pp. 43–45. [Google Scholar]
- Verma, N.; Kumar, N.; Kumar, R. Battery energy storage-based system damping controller for alleviating sub-synchronous oscillations in a DFIG-based wind power plant. Prot. Control. Mod. Power Syst. 2023, 8, 32. [Google Scholar] [CrossRef]
- Okedu, K.E.; Kalam, A. Comparative Study of Grid Frequency Stability Using Flywheel-Based Variable-Speed Drive and Energy Capacitor System. Energies 2023, 16, 3515. [Google Scholar] [CrossRef]
- Singh, P.; Arora, K.; Rathore, U.C.; Yang, E.; Joshi, G.P.; Son, K.C. Performance Evaluation of Grid-Connected DFIG-Based WECS with Battery Energy Storage System under Wind Alterations Using FOPID Controller for RSC. Mathematics 2023, 11, 2100. [Google Scholar] [CrossRef]
- Abouobaida, H.; Cherkaoui, M. Modeling and control of doubly fed induction (DFIG) Wind energy conversion system. J. Electr. Eng. 2015, 15, 1–12. [Google Scholar]
- Mahmoud, M.M.; Atia, B.S.; Esmail, Y.M.; Bajaj, M.; Wapet, D.E.M.; Ratib, M.K.; Hossain, B.; AboRas, K.M.; Abdel-Rahim, A.-M.M. Evaluation and Comparison of Different Methods for Improving Fault Ride-through Capability in Grid-Tied Permanent Magnet Synchronous Wind Generators. Int. Trans. Electr. Energy Syst. 2023, 2023, 7717070. [Google Scholar] [CrossRef]
- Hadoune, A.; Mouradi, A.; Mimet, A.; Chojaa, H.; Dardabi, C.; Gulzar, M.M.; Alqahtani, M.; Khalid, M. Optimizing direct power control of DFIG-based WECS using super-twisting algorithm under real wind profile. Front. Energy Res. 2023, 11, 1261902. [Google Scholar] [CrossRef]
- Sahri, Y.; Tamalouzt, S.; Belaid, S.L.; Bajaj, M.; Ghoneim, S.S.; Zawbaa, H.M.; Kamel, S. Performance improvement of Hybrid System based DFIG-Wind/PV/Batteries connected to DC and AC grid by applying Intelligent Control. Energy Rep. 2023, 9, 2027–2043. [Google Scholar] [CrossRef]
- da Silva, P.L.T.; Rosas, P.A.C.; Castro, J.F.C.; Marques, D.d.C.; Aquino, R.R.B.; Rissi, G.F.; Neto, R.C.; Barbosa, D.C.P. Power Smoothing Strategy for Wind Generation Based on Fuzzy Control Strategy with Battery Energy Storage System. Energies 2023, 16, 6017. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, C.; Yan, Z.; Xue, Y.; He, Y. Coordinated Control of a Wind Turbine and Battery Storage System in Providing Fast-Frequency Regulation and Extending the Cycle Life of Battery. Front. Energy Res. 2022, 10, 927453. [Google Scholar] [CrossRef]
- Zhu, D.; Guo, X.; Tang, B.; Hu, J.; Zou, X.; Kang, Y. Feedforward Frequency Deviation Control in PLL for Fast Inertial Response of DFIG-Based Wind Turbines. IEEE Trans. Power Electron. 2023, 1–12. [Google Scholar] [CrossRef]
- Liu, K.; Sheng, W.; Li, Z.; Liu, F.; Liu, Q.; Huang, Y.; Li, Y. An energy optimal schedule method for distribution network considering the access of distributed generation and energy storage. IET Gener. Transm. Distrib. 2023, 17, 2996–3015. [Google Scholar] [CrossRef]
- Li, M.; Yang, M.; Yu, Y.; Lee, W.-J. A Wind Speed Correction Method Based on Modified Hidden Markov Model for Enhancing Wind Power Forecast. IEEE Trans. Ind. Appl. 2022, 58, 656–666. [Google Scholar] [CrossRef]
- Lin, X.; Liu, Y.; Yu, J.; Yu, R.; Zhang, J.; Wen, H. Stability analysis of Three-phase Grid-Connected inverter under the weak grids with asymmetrical grid impedance by LTP theory in time domain. Int. J. Electr. Power Energy Syst. 2022, 142, 108244. [Google Scholar] [CrossRef]
- Liao, K.; Lu, D.; Wang, M.; Yang, J. A Low-Pass Virtual Filter for Output Power Smoothing of Wind Energy Conversion Systems. IEEE Trans. Ind. Electron. 2022, 69, 12874–12885. [Google Scholar] [CrossRef]
- Rana, M.; Uddin, M.; Sarkar, R.; Meraj, S.T.; Shafiullah, G.M.; Muyeen, S.M.; Islam, A.; Jamal, T. Application of energy storage technology in grid-connected new energy power generation. In Grid-Scale Energy Storage Systems and Applications; Elsevier: Amsterdam, The Netherlands, 2019; pp. 203–241. [Google Scholar] [CrossRef]
- Poudel, R.; Krishnan, V.; Reilly, J.; Koralewicz, P.; Baring-Gould, I. Integration of Storage in the DC Link of a Full Converter-Based Distributed Wind Turbine. In Proceedings of the 2021 IEEE Power & Energy Society General Meeting (PESGM), Washington, DC, USA, 25–29 July 2021; pp. 1–5. [Google Scholar]
- Vargas, R.Z.; Lopes, J.C.; Colque, J.C.; Azcue, J.L.; Sousa, T. Energy Storage System Integration with Wind Generation for Primary Frequency Support in the Distribution Grid. Simpósio Bras. Sist. Elétricos 2021, 1, SBSE2020. [Google Scholar] [CrossRef]
- Simon, L.; Swarup, K.S. Modeling and control of DFIG with battery management system for grid power leveling. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016; pp. 1–6. [Google Scholar]
- Gagnon, R. Wind Farm—DFIG Detailed Model—MATLAB & Simulink. MATLAB. Available online: https://www.mathworks.com/help/physmod/sps/ug/wind-farm-dfig-detailed-model.html;jsessionid=a2a435e13fc5108445d84a28ca36 (accessed on 16 July 2021).
- Sarrias, R.; Fernández, L.M.; García, C.A.; Jurado, F. Coordinate operation of power sources in a doubly-fed induction generator wind turbine/battery hybrid power system. J. Power Sources 2012, 205, 354–366. [Google Scholar] [CrossRef]
- Aktarujjaman, M.; Kashem, M.A.; Negnevitsky, M.; Ledwich, G. Smoothing Output Power of a Doubly Fed Wind Turbine with an Energy Storage System. Aust. Univ. Power Eng. Conf. 2006, 2006, 1–8. [Google Scholar]
- Zhu, Y.; Zang, H.; Cheng, L.; Gao, S. Output Power Smoothing Control for a Wind Farm Based on the Allocation of Wind Turbines. Appl. Sci. 2018, 8, 980. [Google Scholar] [CrossRef]
- Mohod, S.W.; Hatwar, S.M.; Aware, M.V. Grid Support with Variable Speed Wind Energy System and Battery Storage for Power Quality. Energy Procedia 2011, 12, 1032–1041. [Google Scholar] [CrossRef]
- Sugawara, E.; Nikaido, H. Properties of AdeABC and AdeIJK efflux systems of Acinetobacter baumannii compared with those of the AcrAB-TolC system of Escherichia coli. Antimicrob. Agents Chemother 2014, 58, 7250–7257. [Google Scholar] [CrossRef]
- Pant, A. Modelling and Design of Grid Connected Doubly Fed Induction Generator. Master’s Thesis, Texas Tech University, Lubbock, TX, USA, 2019. [Google Scholar]
- Abu-Rub, H.; Malinowski, M.; Al-Haddad, K. Power Electronics for Renewable Energy Systems, Transportation and Industrial Applications, 1st ed.; WILEY: Chichester, UK, 2014. [Google Scholar] [CrossRef]
- Mwaniki, J.; Lin, H.; Dai, Z. A Condensed Introduction to the Doubly Fed Induction Generator Wind Energy Conversion Systems. J. Eng. 2017, 2017, 1–18. [Google Scholar] [CrossRef]
- Zhang, Y.; Ula, S. Comparison and evaluation of three main types of wind turbines. In Proceedings of the Transmission and Distribution Exposition Conference: 2008 IEEE PES Powering Toward the Future, PIMS 2008, Chicago, IL, USA, 21–24 April 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Nikolian, A.; Firouz, Y.; Gopalakrishnan, R.; Timmermans, J.-M.; Omar, N.; Van den Bossche, P.; Van Mierlo, J. Lithium Ion Batteries—Development of Advanced Electrical Equivalent Circuit Models for Nickel Manganese Cobalt Lithium-Ion. Energies 2016, 9, 360. [Google Scholar] [CrossRef]
- Nikolian, A.; De Hoog, J.; Fleurbay, K.; Timmermans, J.; Van De Bossche, P.; Van Mierlo, J. Classification of Electric modelling and Characterization methods of Lithium-ion Batteries for Vehicle Applications. In Proceedings of the European Electric Vehicle Congress, Brussels, Belgium, 3–5 December 2014; pp. 1–15. [Google Scholar]
- Chen, M.; Rincon-Mora, G.A. Accurate Electrical Battery Model Capable of Predicting Runtime and I–V Performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of Lithium-Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Mathworks. Battery. Available online: https://nl.mathworks.com/help/sps/powersys/ref/battery.html (accessed on 23 July 2023).
- Enang, C.M.; Johnson, B.K. Bidirectional dc-dc Converter Control in Battery-Supercapacitor Hybrid Energy Storage System. In Proceedings of the 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; pp. 1–5. [Google Scholar]
- Kim, Y.; Harrington, R.J.; Kim, Y.; Harrington, R.J. Analysis of Various Energy Storage Systems for Variable Speed Wind Turbines; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- Giannoutsos, S.V.; Manias, S.N. A cascade control scheme for a grid connected Battery Energy Storage System (BESS). In Proceedings of the 2012 IEEE International Energy Conference (ENERGYCON 2012), Florence, Italy, 9–12 September 2012; pp. 469–474. [Google Scholar]
- Emeric, B. Key Performance Indicators for the Monitoring of Large-Scale Battery Storage Systems BRUN Emeric Approved Examiner. 2019. Available online: https://kth.diva-portal.org/smash/record.jsf?pid=diva2%3A1371050&dswid=-6871 (accessed on 14 October 2022).
- Wang, Y.; Zhou, Z.; Botterud, A.; Zhang, K.; Ding, Q. Stochastic coordinated operation of wind and battery energy storage system considering battery degradation. J. Mod. Power Syst. Clean Energy 2016, 4, 581–592. [Google Scholar] [CrossRef]
- Ganti, V.C.; Singh, B.; Aggarwal, S.K.; Kandpal, T.C. DFIG-Based Wind Power Conversion with Grid Power Leveling for Reduced Gusts. IEEE Trans. Sustain. Energy 2011, 3, 12–20. [Google Scholar] [CrossRef]
- Qu, L.; Qiao, W. Constant Power Control of DFIG Wind Turbines with Supercapacitor Energy Storage. IEEE Trans. Ind. Appl. 2011, 47, 359–367. [Google Scholar] [CrossRef]
- Smith, S.C.; Sen, P.; Kroposki, B. Advancement of energy storage devices and applications in electrical power system. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–8. [Google Scholar]
- Lee, K.H.; Malmedal, K.; Sen, P.K. Conceptual Design and Cost Estimate for a Stand-Alone Residential Photovoltaic System. In Proceedings of the 2012 IEEE Green Technologies Conference, Trivandrum, India, 18–20 December 2012; pp. 1–6. [Google Scholar]
- Naresh, M.; Soni, U.K.; Tripathi, R.K. Power Flow Control and Power Quality Improvement in DFIG Based Wind Energy Conversion System Using Neuro Fuzzy System. Int. J. Appl. Eng. Res. 2018, 13, 5236–5243. Available online: http://www.ripublication.com (accessed on 21 September 2022).
- Venkatesu, N.; Scholar, M.T. Analysis, Design and Simulation of Bidirectional DC-DC Converter. Int. J. Eng. Res. Technol. 2015, 4, 197–202. [Google Scholar] [CrossRef]
- Hu, H.; Cheng, X.; Wang, J.; Zou, X. Control and Simulation of Bi-directional DC/DC Converter for 5KW Distributed Wind/Solar Hybrid System. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 7039–7044. [Google Scholar]
- Bharath, K.R.; Choutapalli, H.; Kanakasabapathy, P. Control of Bidirectional DC-DC Converter in Renewable based DC Microgrid with Improved Voltage Stability. Int. J. Renew. Energy Res. 2018, 8, 871–877. [Google Scholar] [CrossRef]
- Huang, S.; Wu, Q.; Guo, Y.; Rong, F. Optimal active power control based on MPC for DFIG-based wind farm equipped with distributed energy storage systems. Int. J. Electr. Power Energy Syst. 2019, 113, 154–163. [Google Scholar] [CrossRef]
- Sutikno, T.; Aprilianto, R.A.; Purnama, H.S. Application of non-isolated bidirectional DC–DC converters for renewable and sustainable energy systems: A review. Clean Energy 2023, 7, 293–311. [Google Scholar] [CrossRef]
- Li, B.Y.; Xu, C.; Li, C.; Guan, Z. Working principle analysis and control algorithm for bidirectional DC-DC converter. J. Power Technol. 2017, 97, 327–335. [Google Scholar]
- Gambhir, J.; Thakur, T.; Verma, H. Wind Energy Integration with Grid Using an Energy Storage. In Proceedings of the World Congress on Engineering, London, UK, 29 June–1 July 2016; Volume I. [Google Scholar]
- Zhang, G.; Dai, Y.; Cui, J. Design and Realization of a Bi-directional DC/DC Converter in photovoltaic power system. In Proceedings of the 2016 International Forum on Energy, Environment and Sustainable Development, Shenzhen, China, 16–17 April 2016. [Google Scholar]
- Chao, K.; Tseng, M.; Huang, C.; Liu, Y.; Huang, L. Design and Implementation of a Bidirectional DC-DC Converter for Stand-Alone Photovoltaic Systems the Proposed Bidirectional Buck-Boost Converter. Int. J. Comput. Consum. Control 2013, 2, 44–55. [Google Scholar]
- Suresh, K.; Arulmozhiyal, R. Design and Implementation of Bi-Directional DC-DC Converter for Wind Energy System. Circuits Syst. 2016, 7, 3705–3722. [Google Scholar] [CrossRef]





















| Power Capacity (kW) | Discharge Time (h) | DoD | Energy (kWh) of the Battery Bank | Battery Nominal Voltage (V) | Battery Bank Configuration |
|---|---|---|---|---|---|
| 450 kW | 8 h | 0.5 | 7200 kWh | 470 V | 39S100P |
| Mode of Operation | Switch ON | Switch OFF | Power Flow | Battery State |
|---|---|---|---|---|
| Buck mode | followed by Diode | followed by Diode | From DC-link to Battery | Battery Charging |
| Boost mode | followed by Diode | followed by Diode | From Battery to DC-link | Battery Discharging |
| Serial Number | Parameters | Values |
|---|---|---|
| 1 | Duty cycle, | 0.4 |
| 2 | Duty cycle, | 0.6 |
| 3 | Switching frequency | 25 kHz |
| 3 | Converter output power | 450 kW |
| 4 | DC-link voltage () | 1150 V |
| 5 | Battery voltage () | 470 V |
| 6 | Inductor | 59 µH |
| 7 | Ripple in inductor current | 20% |
| 8 | The capacitor on the LV side () | 199 µF |
| 9 | The capacitor on the HV side () | 1997 µF |
| 10 | Ripple in capacitor voltage | 1% |
| Battery Parameters | Value | Unit |
|---|---|---|
| Nominal Voltage | 470 | V |
| Rated Capacity | 15,000 | Ah |
| Initial State of Charge | 80 | % |
| Battery Response Time | 1 | s |
| Cut-off Voltage | 352 | V |
| Fully Charged Voltage | 547 | V |
| Nominal Discharge Current | 652 | A |
| Internal Resistance | 0.000313 | ohms |
| Capacity at Nominal Voltage | 13,565 | Ah |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Behabtu, H.A.; Vafaeipour, M.; Kebede, A.A.; Berecibar, M.; Van Mierlo, J.; Fante, K.A.; Messagie, M.; Coosemans, T. Smoothing Intermittent Output Power in Grid-Connected Doubly Fed Induction Generator Wind Turbines with Li-Ion Batteries. Energies 2023, 16, 7637. https://doi.org/10.3390/en16227637
Behabtu HA, Vafaeipour M, Kebede AA, Berecibar M, Van Mierlo J, Fante KA, Messagie M, Coosemans T. Smoothing Intermittent Output Power in Grid-Connected Doubly Fed Induction Generator Wind Turbines with Li-Ion Batteries. Energies. 2023; 16(22):7637. https://doi.org/10.3390/en16227637
Chicago/Turabian StyleBehabtu, Henok Ayele, Majid Vafaeipour, Abraham Alem Kebede, Maitane Berecibar, Joeri Van Mierlo, Kinde Anlay Fante, Maarten Messagie, and Thierry Coosemans. 2023. "Smoothing Intermittent Output Power in Grid-Connected Doubly Fed Induction Generator Wind Turbines with Li-Ion Batteries" Energies 16, no. 22: 7637. https://doi.org/10.3390/en16227637