
Centralized Protection of Networked Microgrids with Multi-Technology DERs

Abstract
:1. Introduction
1.1. Background
1.2. Related Work
2. Centralized Protection and Control
2.1. CPC Architecture for Conventional Systems
2.2. Proposed CPC Architecture for Networked Microgrids
3. Design of the Proposed Centralized Protection Platform
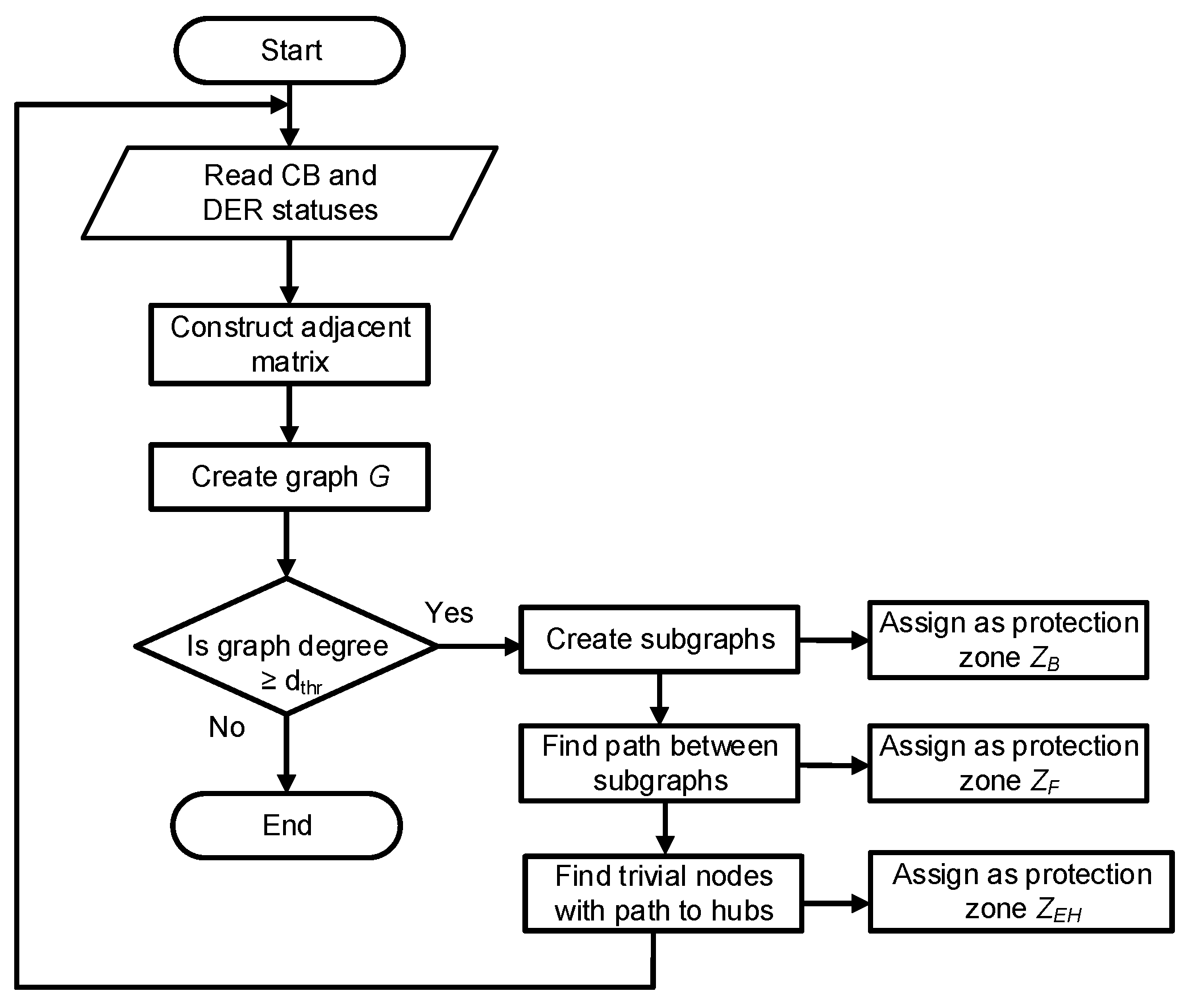
3.1. Zone Selection Module
- Graph Theory: Graph theory is a major branch of combinatorial mathematics and has been extensively applied in various fields [41]. Networked microgrids with n nodes comprised of two or more interconnected microgrids can be modelled by a graph using an adjacency matrix . Vertices is a non-empty finite set of elements and the edges.is a finite set of unordered elements. An edge is a pair of vertices , and and are referred to as adjacent or neighboring vertices. and the element if the nodes i and j are linked by an edge, while if otherwise.
3.2. Protection Module
- Incremental Transient-Energy-Based (ITE) Algorithm: The directional algorithm based on Incremental Transient Energy () is obtained from superimposed current and voltage quantities. This is calculated as the integral of the product of the incremental modal (interphase) voltage and current quantities. The interphase (for phases AB) is given as [34]:where and are incremental voltage and current quantities for phases AB and , , , are the voltage and current fault and prefault quantities, respectively. Similar derivations can be performed for the modal phase CA.One major advantage of the proposed ITE-based directional algorithm is its suitability for inverter-based microgrids with insignificant zero- and negative-sequence fault currents. Traditional zero- and negative-sequence directional algorithms may fail or even be deactivated during faults with insignificant zero- and negative-sequence fault currents.
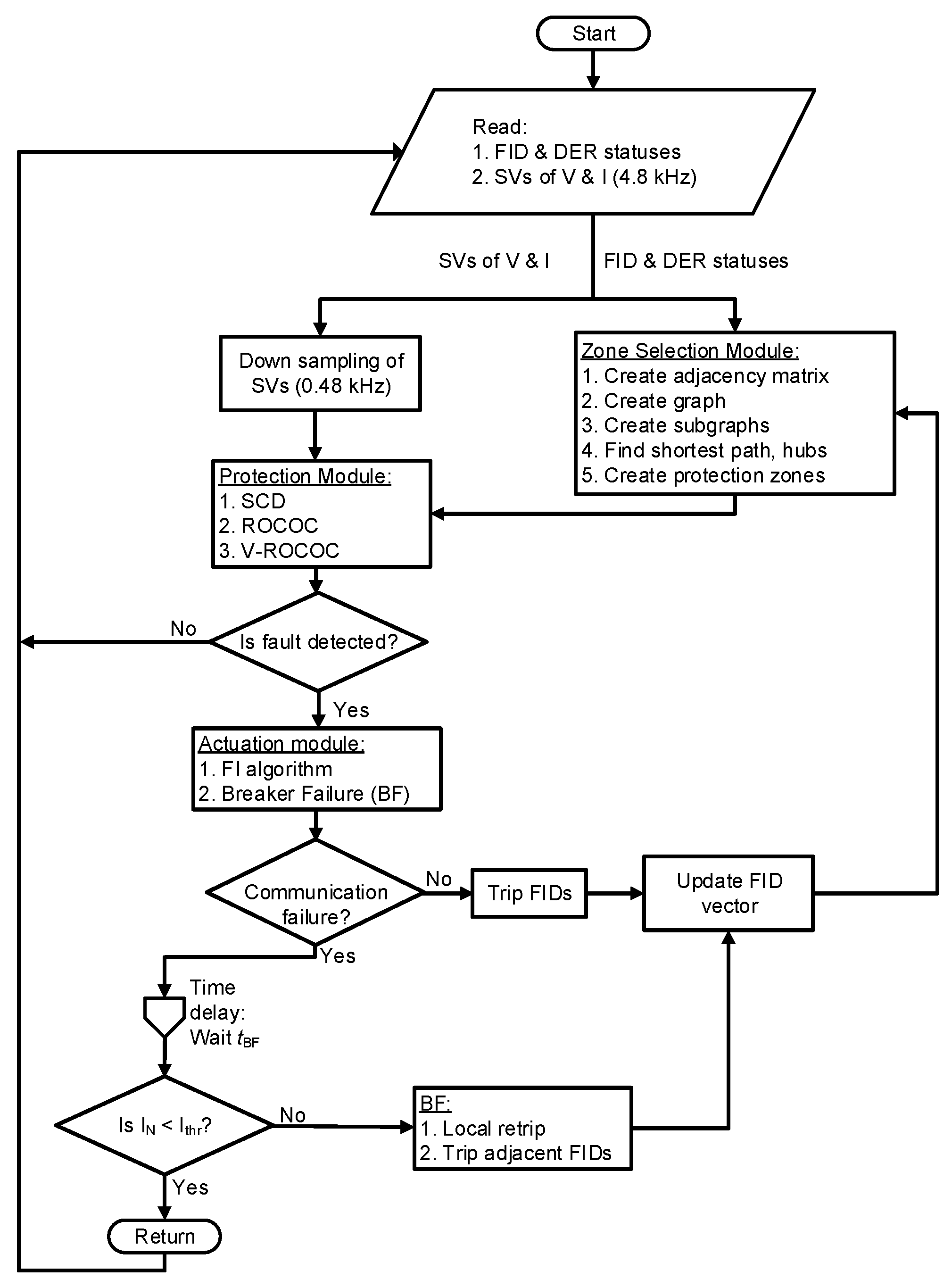
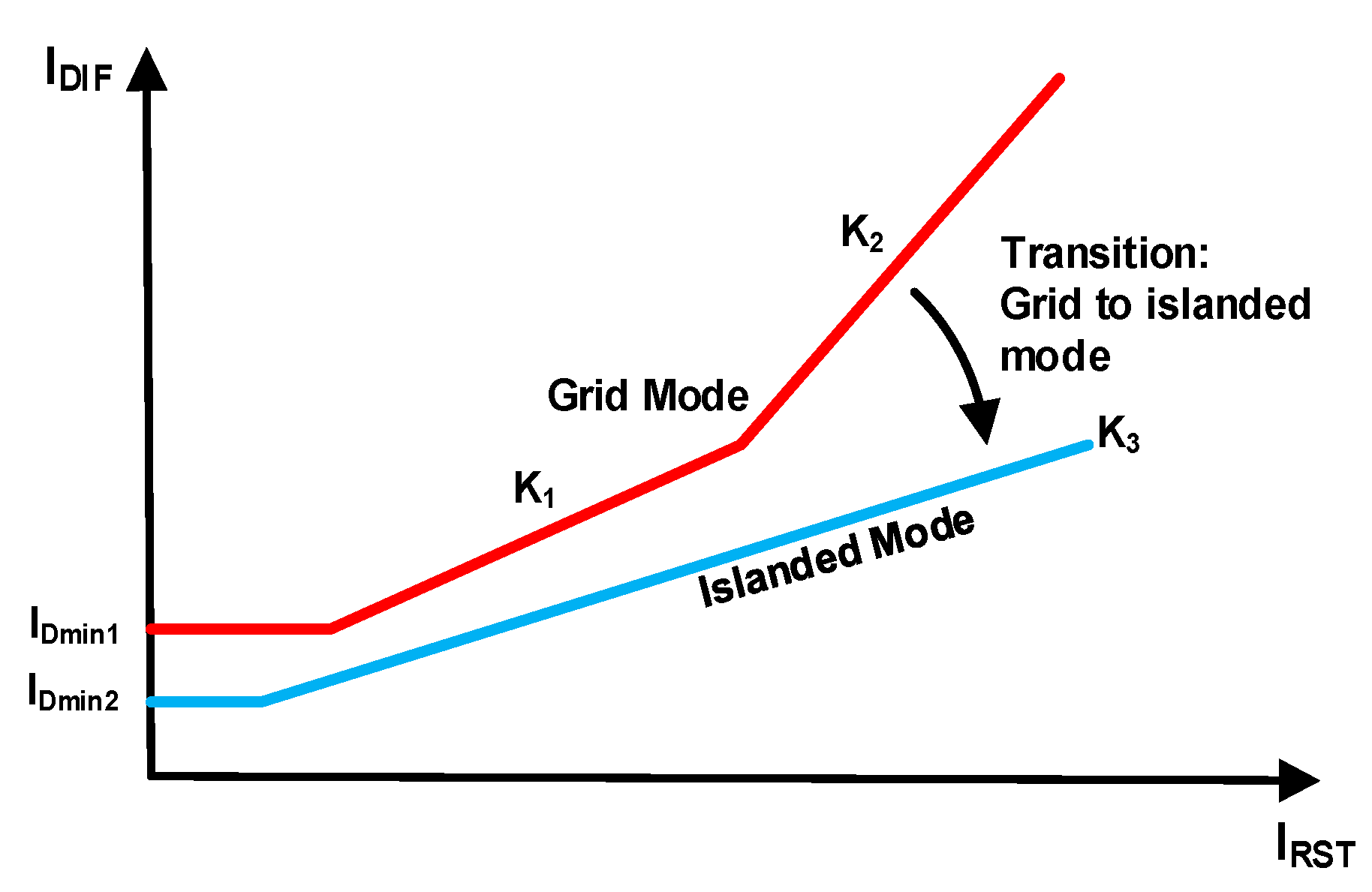
- Supervised Current Differential (SCD) Algorithm: The differential current is calculated as the summation of all the line currents at the protected zone on a per phase basis, while the restraining current is calculated using the maximum current from any of the feeders in the protected zone.where is the current at the kth feeder, is the magnitude of the current at the kth feeder, is the number of line feeders connected to the protected zone, denotes phases A, B, C, and is the restraining current multiplying factor (typically 0.5 or unity).
- (a)
- adaptive multi-slope percentage differential characteristics compared to traditional percentage dual-slope differential characteristic techniques,
- (b)
- the differential characteristic of the proposed SCD algorithm dynamically changes from a dual slope characteristic (when in the grid-connected mode) to a single slope characteristic (when in the islanded mode), and
- (c)
- the ITE-based directional supervision enhances the sensitivity, selectivity, and security of the SCD algorithm.
- 3.
- Rate-of-Change of Current Algorithm: The ROCOC at the jth line lateral is given as [34]:where , are the sampled currents at the present and previous sampling instants at the jth line lateral and is the sampling interval (2 ms).
3.3. Actuation Module
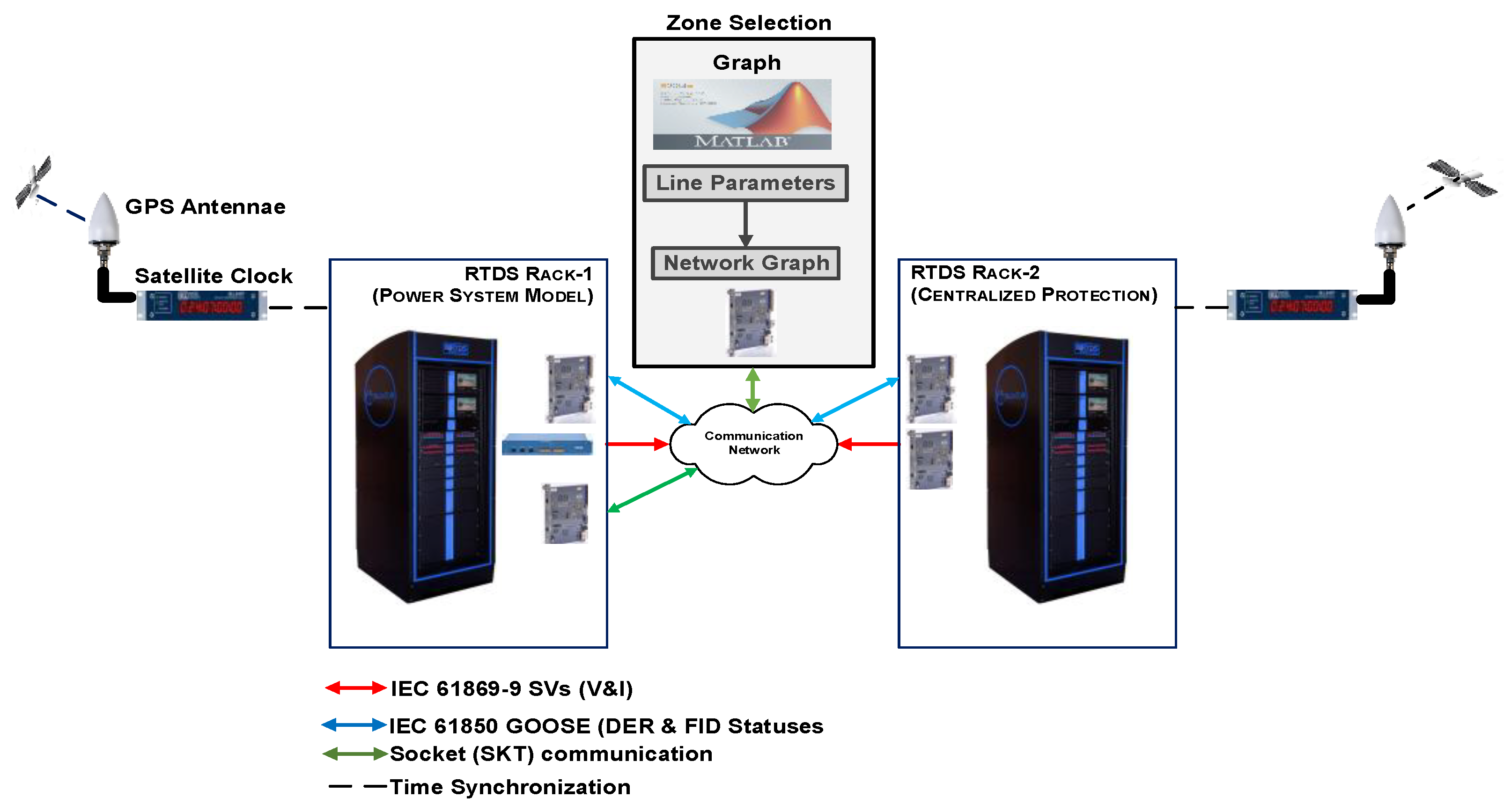
4. Real-Time Implementation
4.1. Hardware Impelementation
4.2. Implementation of the Zone Selection Module
4.3. Implementation of the Protection Module
5. Case Studies and Results
5.1. Dynamic Zone Selection
5.2. Case Study-1: Grid-Connected Mode of Operation
5.3. Case Study–2: Islanded Mode of Operation
5.4. Case Study–3: Week Infeed Condition
5.5. Discussion
5.5.1. Results
5.5.2. Redundant CPC Protection
5.5.3. Field Deployment
5.5.4. Impact of Adverse Communication Network
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Parameters of the IEEE 13 Node Test Distribution System
Appendix A.2. Parameters of Battery Energy Storage System (BESS)
| Parameter | Setting |
| Capacity (MW) | 2.0 |
| Battery type | Min/Rincon-Mora |
| Number of cells in series per stack (EA) | 250 |
| Number of stacks in parallel (EA) | 250 |
| Capacity of a single cell (AH) | 0.85 |
| Initial state of charge (%) | 85 |
| Capacity fading factor (%) | 0 |
Appendix A.3. Parameters of Solar PV
| Parameter | Setting |
| Solar cell model | Single diode five parameter model |
| Solar cell semiconductor material | Monocrystalline |
| Number of series connected cells per string per module | 36 |
| Number of parallel strings of cells | 1 |
| Open circuit voltage (V) | 21.7 |
| Short circuit current (A) | 3.35 |
| Voltage at Pmax (V) | 17.4 |
| Current at Pmax (A) | 3.05 |
| Reference temperature at standard test conditions (°C) | 25 |
| Number of modules in series | 115 |
| Number of modules in parallel | 66 |
Appendix A.4. Parameters of DFIG Wind Farm
| Parameter | Setting |
| Induction Generator | |
| Inertia constant (MWs/MVA) | 0.78 |
| Rated stator L-L voltage (V) | 690 |
| Rated MVA (MVA) | 2.2 |
| Rated frequency (Hz) | 60 |
| Stator resistance (p.u.) | 0.00462 |
| Stator leakage reactance (p.u.) | 0.102 |
| Unsaturated magnetizing reactance (p.u.) | 4.348 |
| First cage rotor resistance (p.u.) | 0.0060 |
| First cage rotor leakage reactance (p.u.) | 0.08596 |
| Wind Turbine | |
| Rated turbine power (MW) | 2.0 |
| PU Generator speed (p.u.) | 1.2 |
| Rated wind speed (m/s) | 12.0 |
| Cut-in wind speed (m/s) | 6.0 |
Appendix A.5. Parameters of Diesel Generator
| Parameter | Setting |
| Rated MVA of the machine (MVA) | 2.0 |
| Rated L-L voltage (V) | 480 |
| Base angular frequency (Hz) | 60 |
| Inertia constant (MWs/MVA) | 3.03 |
| Stator leakage reactance (p.u.) | 0.130 |
| D-axis unsaturated reactance (p.u.) | 1.79 |
| D-axis unsaturated transient reactance (p.u.) | 0.169 |
| D-axis unsaturated sub-transient reactance (p.u.) | 0.135 |
| Q-axis unsaturated reactance (p.u.) | 1.71 |
| Q-axis unsaturated transient reactance (p.u.) | 0.228 |
| Q-axis unsaturated sub-transient reactance (p.u.) | 0.2 |
| Stator resistance (p.u.) | 0.002 |
| D-axis unsaturated transient open time constant (s) | 4.3 |
| D-axis unsaturated sub-transient open time constant (s) | 0.032 |
| Q-axis unsaturated transient open time constant (s) | 0.85 |
| Q-axis unsaturated sub-transient open time constant (s) | 0.05 |
References
- Jones, D.; Kumm, J.J. Future distribution feeder protection using directional overcurrent elements. IEEE Trans. Ind. Appl. 2014, 50, 1385–1390. [Google Scholar] [CrossRef]
- Hooshyar, A.; Iravani, R. A New Directional Element for Microgrid Protection. IEEE Trans. Smart Grid 2018, 9, 6862–6876. [Google Scholar] [CrossRef]
- Yazdaninejadi, A.; Golshannavaz, S.; Nazarpour, D.; Teimourzadeh, S.; Aminifar, F. Dual-Setting Directional Overcurrent Relays for Protecting Automated Distribution Networks. IEEE Trans. Ind. Inform. 2018, 15, 730–740. [Google Scholar] [CrossRef]
- Muda, H.; Jena, P. Superimposed Adaptive Sequence Current Based Microgrid Protection: A New Technique. IEEE Trans. Power Deliv. 2017, 32, 757–767. [Google Scholar] [CrossRef]
- Saleh, K.A.; Mehrizi-Sani, A. Harmonic Directional Overcurrent Relay for Islanded Microgrids with Inverter-Based DGs. IEEE Syst. J. 2021, 15, 2720–2731. [Google Scholar] [CrossRef]
- Sortomme, E.; Venkata, S.S.; Mitra, J. Microgrid Protection Using Communication-Assisted Digital Relays. IEEE Trans. Power Deliv. 2010, 25, 2789–2796. [Google Scholar] [CrossRef]
- Yuan, C.; Haj-ahmed, M.A.; Illindala, M.A. Protection Strategies for Medium-Voltage Direct-Current Microgrid at a Remote Area Mine Site. IEEE Trans. Ind. Appl. 2015, 51, 2846–2853. [Google Scholar] [CrossRef]
- Gao, H.; Li, J.; Xu, B. Principle and implementation of current differential protection in distribution networks with High Penetration of DGs. IEEE Trans. Power Deliv. 2017, 32, 565–574. [Google Scholar] [CrossRef]
- Arunan, A.; Sirojan, T.; Ravishankar, J.; Ambikairajah, E. Real-time adaptive differential feature-based protection scheme for IMGs using Edge Computing. IEEE Syst. J. 2021, 15, 1318–1328. [Google Scholar] [CrossRef]
- Dubey, K.; Jena, P. Impedance Angle-Based Differential Protection Scheme for Microgrid Feeders. IEEE Syst. J. 2021, 15, 3291–3300. [Google Scholar] [CrossRef]
- Huang, W.; Nengling, T.; Zheng, X.; Fan, C.; Yang, X.; Kirby, B.J. An impedance protection scheme for feeders of active distribution networks. IEEE Trans. Power Deliv. 2014, 25, 1591–1602. [Google Scholar] [CrossRef]
- Redfern, M.A.; Al-Nasseri, H. Protection of microgrids dominated by distributed generation using solid state converters. In Proceedings of the IET 9th International Conference on Developments in Power Systems Protection (DPSP 2008), Glasgow, Scotland, 17–20 March 2008; pp. 670–674. [Google Scholar] [CrossRef]
- Al-Nasseri, H.; Redfern, M.A. Harmonics content based protection scheme for micro-grids dominated by solid state converters. In Proceedings of the 12th International Middle-East Power System Conference, Aswan, Egypt, 12–15 March 2008; pp. 50–56. [Google Scholar] [CrossRef]
- Vieira, J.C.; Freitas, W.; Xu, W.; Morelato, A. Performance of frequency relays for distributed generation protection. IEEE Trans. Power Deliv. 2006, 21, 1120–1127. [Google Scholar] [CrossRef]
- Li, X.; Dysko, A.; Burt, G.M. Travelling wave-based protection scheme for inverter-dominated microgrid using mathematical morphology. IEEE Trans. Smart Grid 2014, 5, 2211–2218. [Google Scholar] [CrossRef]
- Zarei, S.F.; Parniani, M.A. Comprehensive digital protection scheme for low-voltage microgrids with inverter-based and conventional distributed generations. IEEE Trans. Power Deliv. 2017, 32, 441–452. [Google Scholar] [CrossRef]
- Soleimanisardoo, A.; Karegar, H.K.; Zeineldin, H.H. Differential frequency protection scheme based on off-nominal frequency injections for inverter-based islanded microgrids. IEEE Trans. Smart Grid 2019, 10, 2107–2114. [Google Scholar] [CrossRef]
- Gururani, A.; Mohanty, S.R.; Mohanta, J.C. Microgrid protection using Hilbert–Huang transform based-differential scheme. IET Gener. Transm. Distrib. 2016, 10, 3707–3716. [Google Scholar] [CrossRef]
- Reiz, C.; Leite, J.B. Optimal Coordination of Protective Devices in Distribution Networks with Distributed Energy Resources and Microgrids. IEEE Access 2022, 10, 99584–99594. [Google Scholar] [CrossRef]
- Dehghanpour, E.; Karegar, H.K.; Kheirollahi, R.; Soleymani, T. Optimal coordination of directional overcurrent relays in microgrids by using cuckoo-linear optimization. IEEE Trans. Smart Grid 2018, 9, 1365–1375. [Google Scholar] [CrossRef]
- Sharaf, H.M.; Zeineldin, H.H.; El-Saadany, H. Protection coordination for microgrids with grid-connected and islanded capabilities using communication assisted dual setting directional overcurrent relays. IEEE Trans. Smart Grid 2018, 9, 143–151. [Google Scholar] [CrossRef]
- Usama, M.; Mokhlis, H.; Moghavvemi, M.; Mansor, N.N.; Alotaibi, M.A.; Muhammad, M.A.; Bajwa, A.A. A Comprehensive Review on Protection Strategies to Mitigate the Impact of Renewable Energy Sources on Interconnected Distribution Networks. IEEE Access 2021, 9, 35740–35765. [Google Scholar] [CrossRef]
- Eissa, M.M. A novel centralized wide area protection “CWAP” in phase portrait based on pilot wire including phase comparison. IEEE Trans. Smart Grid 2018, 10, 2671–2682. [Google Scholar] [CrossRef]
- Bo, Z.Q.; Han, M.; Klimek, A.; Zhang, B.H.; He, J.H.; Dong, X.Z. A centralized protection scheme based on combined positional protection techniques. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Sakis Meliopoulos, A.P.; Cokkinides, G.J.; Myrda, P.; Liu, Y.; Fan, R.; Sun, L.; Huang, R.; Tan, Z. Dynamic state estimation-based protection: Status and promise. IEEE Trans. Power Deliv. 2017, 32, 320–330. [Google Scholar] [CrossRef]
- Albinali, H.F.; Sakis Meliopoulos, A.P. Resilient protection system through centralized substation protection. IEEE Trans. Power Deliv. 2018, 33, 1418–1427. [Google Scholar] [CrossRef]
- Monadi, M.; Gavriluta, C.; Luna, A.; Candela, J.I.; Rodriguez, P. Centralized protection strategy for medium voltage DC microgrid. IEEE Trans. Power Deliv. 2017, 32, 430–440. [Google Scholar] [CrossRef]
- Ustun, T.; Ozansoy, C.; Zayegh, A. Modeling of a centralized microgrid protection system and distributed energy resources according to IEC 61850-7-420. IEEE Trans. Power Syst. 2012, 27, 1560–1567. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, H.; Gao, W.; Peng, F. Development of a substation-area backup protective relay for smart substation. IEEE Trans. Smart Grid 2017, 8, 2544–2553. [Google Scholar] [CrossRef]
- Choi, S.; Sakis Meliopoulos, A.P. Effective real-time operation and protection scheme of microgrids using distributed dynamic state estimation. IEEE Trans. Power Deliv. 2017, 32, 504–514. [Google Scholar] [CrossRef]
- Ma, J.; Xiang, X.; Zhang, R.; Li, P.; Liu, J.; Thorp, J.S. Regional protection scheme for distribution network based on logical information. IET Gener. Transm. Distrib. 2017, 11, 4314–4323. [Google Scholar] [CrossRef]
- Seyedi, Y.; Karimi, H. Coordinated protection and control based on synchrophasor data processing in smart distribution network. IEEE Trans. Power Syst. 2018, 33, 634–645. [Google Scholar] [CrossRef]
- Kannaian, R.B.; Joseph, B.B.; Ramachandran, R.P. An adaptive centralized protection and relay coordination algorithm for Microgrid. Energies 2023, 16, 4820. [Google Scholar] [CrossRef]
- Adewole, A.C.; Rajapakse, A.D.; Ouellette, D.; Forsyth, P. Protection of Active Distribution Networks Incorporating Microgrids with Multi-Technology Distributed Energy Resources. Electr. Power Syst. Res. 2022, 202, 107575. [Google Scholar] [CrossRef]
- IEC 61850-8-1; Communication Networks and Systems for Power Utility Automation—Part 8-1: Specific Communication Service Mapping (SCSM); Mappings to MMS (ISO 9506-1 and ISO 9506-2) and to ISO/IEC 8802-3. International Electrotechnical Commission: Geneva, Switzerland, 2011.
- IEC 61869-9; Instrument Transformers—Part 9: Digital Interface for Instrument Transformers. International Electrotechnical Commission: Geneva, Switzerland, 2016.
- IEEE Power System Relaying Committee. Centralized Substation Protection and Control WG K15 Report. December 2015. Available online: https://www.pes-psrc.org/kb/report/020.pdf (accessed on 8 October 2023).
- IEEE Std C37.118.1-2011 (Revision of IEEE Std C37.118-2005); IEEE Standard for Synchrophasor Measurements for Power Systems. IEEE: New York, NY, USA, 2011; pp. 1–61. [CrossRef]
- IEC 62439-3:2016; Industrial Communication Networks—High Availability Automation Networks—Part 3: Parallel Redundancy Protocol (PRP) and High-Availability Seamless Redundancy (HSR). International Electrotechnical Commission: Geneva, Switzerland, 2016.
- SEL-401 Protection, Automation, and Control Merging Unit Instruction Manual; Schweitzer Engineering Laboratory: Pullman, WA, USA, 2021.
- Sedgewick, R. Algorithms in C—Part 5 Graphs Algorithms; Addison-Wesley: Boston, MA, USA, 2002. [Google Scholar]
- IEEE 13-Node Test Feeder, IEEE PES Test Feeder. Available online: https://site.ieee.org/pes-testfeeders/resources/ (accessed on 17 January 2023).
- IEEE Std 1588-2019 (Revision of IEEE Std 1588-2008); IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems. IEEE: New York, NY, USA, 2020; pp. 1–499. [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Scope | Limitations/Disadvantages |
|---|---|---|
| [23] | Protection of traditional grid using a combination of current differential and phase comparison schemes. | Traditional protection algorithms were used. These could fail for microgrids (MGs) with topology changes, DER changes, and varying fault current levels. |
| [24] | High frequency fault current transient detection for transmission lines in traditional grids. | Proposed method might fail when used in MGs with topology changes, DER changes, and varying fault current levels. |
| [25,26,30] | Model-based dynamic state estimation for the protection of substation assets. | Performance of this method depends on the accuracy of the developed model of the power system components. |
| [27] | Differential protection relays per DC sub-microgrid supervised by a centralized protection unit. | Requires multiple local distributed protection relays. These relays could send the wrong decision or conflicting information to the centralized protection unit. |
| [28] | Communication-based protection using the IEC 61850 Standard. | Depends on the information received from multiple distributed protection devices. |
| [29] | Differential protection algorithm with an adaptive restraint characteristic. | This method is not suitable for primary protection and is limited to backup protection only. Could fail for microgrids with topological changes, DER changes, and varying fault current levels. |
| [31] | Regional protection scheme based on overcurrent (OC) protection devices. | Performance depends on the accuracy of the logical information received from multiple protection devices. Also, multiple OC settings per relay are required to provide a 100% protection coverage of a single line length. |
| [32] | Based on persistent overvoltage and/or frequency disturbance for microgrid. | Only line protection was considered. The practicability of the proposed method was not demonstrated. |
| [33] | Distributed overcurrent protective relays supervised by a microgrid central controller (MCC). | Performance depends on multiple distributed relays wherein coordination is determined by the MCC. It could be difficult providing time-coordination to multiple relays during fast dynamic system topology changes or operating modes. |
| Graph Component | Description |
|---|---|
| Network graph | Networked Microgrids (MGs) |
| Subnetworks | Individual MGs |
| Vertices | Busbars, nodes |
| Edges | Circuit Breakers (CBs), disconnectors (switches), CTs, CB-CT branches, fuses, power transformers |
| Subgraphs (ZB) | Vertices with degree d(v) > dthr. |
| Shortest path (ZF) | Path between subgraphs |
| MG Diameter (ZEH) | Path between end vertices in the MGs and hubs |
| Zone Type | Protection Algorithms |
|---|---|
| ZB zone | SCDITE,bus |
| ZF zone | SCDITE,line, V-ROCOC |
| ZEH zone | V-ROCOC, ROCOC |
| Graph Component | Substation Components |
|---|---|
| Vertices | Node 650, Node 632, Node 633, Node 634, Node 645, Node 646 |
| Edges | E1, E2, E3, E4, E5 |
| Case Study | No. of Prot. Zones | Protection Zones |
|---|---|---|
| Case study-1 | 13 | ZB: {632,671,645,633}, {671,680,684,692}, {684,611,671,652} ZEH: {632-671}, {684-671} ZF: {All end nodes-to-nearest hub} |
| Case study-2 | 11 | ZB: {632,671,645,633}, {671,680,684,692} ZEH: {632-671} ZF: {All end nodes-to-nearest hub} |
| Case study-3 | 10 | ZB: {632,671,645,633}, {671,680,684,692} ZEH: {632-671} ZF: {All end nodes-to-nearest hub} |
| Protection Zones | Zone Type | Protection Algorithms | FIDs |
|---|---|---|---|
| Node 632 Feeders {632,671,645,633} | ZB zone | SCDITE,bus | S1–3A, S1–3B, S1–3C, S1–3D |
| Node 671 Feeders {671,680,684,692}, | ZB zone | SCDITE,bus | S2–3A, S2–3B, S2–3C, S2–3D |
| Node 684 Feeders {684,611,671,652} | ZB zone | SCDITE,bus | S2–2A, S2–2B, S2–2C |
| Line 632-671 | ZF zone | SCDITE,line,V–ROCOC | S1–3C, S2–3A |
| Line 684-671 | ZF zone | SCDITE,line, V–ROCOC | S2–2C, S2–3B |
| Line 646-632 | ZEH zone | V–ROCOC, ROCOC | S1–1, S1–2A, S1–2B, S1–3B |
| Line 634-632 | ZEH zone | V–ROCOC, ROCOC | S1–3D, S1–4A, S1–4B, S1–5 |
| Line 611-684 | ZEH zone | V–ROCOC, ROCOC | S2–1, S2–2A |
| Line 652-684 | ZEH zone | V–ROCOC, ROCOC | S2–2B, S2–4 |
| Line 680-671 | ZEH zone | V–ROCOC, ROCOC | S2–3C, S2–5 |
| Line 675-671 | ZEH zone | V–ROCOC, ROCOC | S2–3D, S3–1A, S3–1B, S3–2 |
| Line 650-632 | ZEH zone | V–ROCOC, ROCOC | CB–PCC, S1–3A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adewole, A.C.; Rajapakse, A.D.; Ouellette, D.; Forsyth, P. Centralized Protection of Networked Microgrids with Multi-Technology DERs. Energies 2023, 16, 7080. https://doi.org/10.3390/en16207080
Adewole AC, Rajapakse AD, Ouellette D, Forsyth P. Centralized Protection of Networked Microgrids with Multi-Technology DERs. Energies. 2023; 16(20):7080. https://doi.org/10.3390/en16207080
Chicago/Turabian StyleAdewole, Adeyemi Charles, Athula D. Rajapakse, Dean Ouellette, and Paul Forsyth. 2023. "Centralized Protection of Networked Microgrids with Multi-Technology DERs" Energies 16, no. 20: 7080. https://doi.org/10.3390/en16207080