
Experimental Study of an Inverter Control for Reactive Power Compensation in a Grid-Connected Solar Photovoltaic System Using Sliding Mode Control


Abstract
:1. Introduction
- The grid-connected PV system supplies active power and compensates for the reactive power of the local non-linear load connected to the PCC.
- It is important to note that the control scheme allows the PV system to continue operating and improves the PF of non-linear loads connected in intermittent periods or in the total absence of power generation.
- The proposed scheme is confirmed by an SMC for current reference tracking and is PI-based to regulate the capacitor voltage for the inverter operation in the absence of power generation from a PV array.
- The system behavior verifies that the SMC technique is adequate and allows the inverter to improve the PF and decrease the total harmonic distortion (THD) value of the grid current injected into the grid by the PV system.
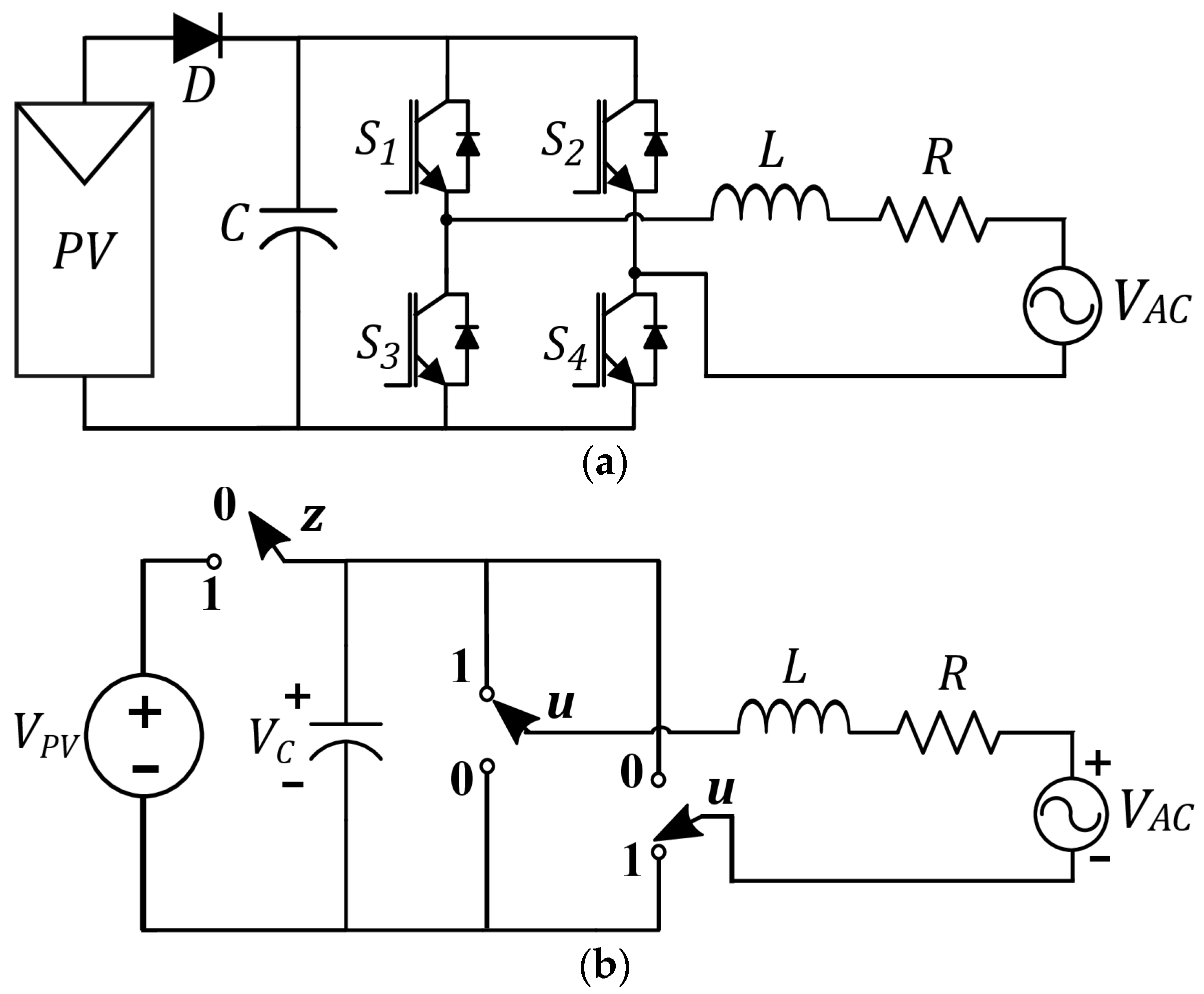
2. System Description
2.1. Operation with Power Generation
2.2. Operation without Power Generation
3. Control Scheme
- -
- The power source is a PV array; in parallel, a capacitor is connected through a power diode, which prevents the return of the electrical current from the grid current to the solar PV array. The capacitor is the virtual power source in periods when the panel is not inactive.
- -
- The inverter performs the DC-to-AC power conversion and produces controllable current output.
- -
- An inductive filter RL was placed between the inverter output and grid to cancel switching harmonics.
- -
- An inductive load, as a reference, is PCC-connected.
- -
- To obtain iL, an active power estimator from the PV array and the voltage loop are used to maintain the capacitor voltage in the period of the absence of PV energy. The estimator information is obtained by the maximum power tracking algorithm (MPPT) of the PV array and guarantees the balance of power.
- -
- The DQ transform obtains the reactive power reference based on the signals that the PLL builds when synchronized with the main voltage. DQ is mentioned in Section 4.3.
- -
- The SMC loop is designed for current reference tracking through the generation of the control signal u. With the control signal and a proper PWM technique, the inverter produces output power with a low loss, a high efficiency, low distortion, a short computation time, and minimal harmonics [26]. With a proper modulation strategy, reactive power generation is achieved in inverter topologies without any alteration to the converter structure [27]. A Level-Shifted MultiCarrier PWM switching technique is employed to generate the desired output current. This modulation has been studied and widely used in multilevel inverter topologies for power quality improvement applications [28].

4. Control Theory
4.1. Voltage Control Loop
4.2. Current Control Loop
4.3. Reactive Power Estimator
5. Simulation Test
5.1. Simulation Parameters
5.2. Power Generation Available
5.3. Power Generation Becomes Unavailable
5.4. Transition Period—Power Energy Not Available
5.5. Transition Period—Power Energy Becomes Available
6. Real-Time Operation
6.1. Testing Equipment
6.2. Power Generation Available
6.3. Power Generation Is Not Available
6.4. Transition Period—Power Energy Becomes Unavailable
6.5. Transition Period—Power Energy Becomes Available
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Energy Agency. Market Analysis and Forecast from 2018 to 2023; Technical Report; International Energy Agency: Paris, France, 2018.
- Kumar, N.M.; Dasari, S.J.; Reddy, B. Availability factor of a PV power plant: Evaluation based on generation and inverter running periods. In Proceedings of the International Scientific Conference “Environmental and Climate Technologies”, CONECT 2018, Riga, Latvia, 16–18 May 2018. [Google Scholar]
- Kolhe, M.L.; Rasul, M.J.M.A. 3-Phase grid-connected building integrated photovoltaic system with reactive power control capability. Renew. Energy 2020, 154, 1065–1075. [Google Scholar] [CrossRef]
- Mandoulidis, P.; Chaspierre, G.; Vournas, C.; Van Cutsem, T. Overview, comparison, and extension of emergency controls against voltage instability using Inverter-Based Generators. Sustain. Energy Grids Netw. 2022, 31, 100710. [Google Scholar] [CrossRef]
- Gusman, L.S.; Pereira, H.A.; Callegari, J.M.S.; Cupertino, A.F. Design for the reliability of multifunctional PV inverters used in industrial power factor regulation. Int. J. Electr. Power Energy Syst. 2020, 119, 105932. [Google Scholar] [CrossRef]
- Ippolito, M.G.; Musca, R.; Zizzo, G. Generalized power-angle control for grid-forming converters: A structural analysis. Sustain. Energy Grids Netw. 2020, 31, 100696. [Google Scholar] [CrossRef]
- Alqatamin, M.; McIntyre, M.L. Nonlinear Self-Synchronizing Current Control for Grid-Connected Photovoltaic Inverters. Energies 2022, 15, 4855. [Google Scholar] [CrossRef]
- Kaushal, J.; Basak, P. Power quality control based on voltage sag/swell, unbalancing, frequency, THD and power factor using artificial neural network in PV integrated AC microgrid. Sustain. Energy Grids Netw. 2020, 23, 100365. [Google Scholar] [CrossRef]
- Montero, M.I.M.; Cadaval, E.R.; González, F.B. Comparison of control strategies for shunt active power filters in three-phase four-wire systems. IEEE Trans. Power Electron. 2007, 22, 229–236. [Google Scholar] [CrossRef]
- Liu, L.; Li, H.; Xue, Y.; Liu, W. Reactive power compensation and optimization strategy for grid-interactive cascaded photovoltaic systems. IEEE Trans. Power Electron. 2015, 30, 188–202. [Google Scholar] [CrossRef]
- Cortajarena, J.A.; Barambones, O.; Alkorta, P.; Cortajarena, J. Sliding mode control of an active power filter with photovoltaic maximum power tracking. Int. J. Electr. Power Energy Syst. 2019, 110, 747–758. [Google Scholar] [CrossRef]
- Szultka, A.; Szultka, S.; Czapp, S.; Karolak, R.; Andrzejewski, M.; Kapitaniak, J.; Kulling, M.; Bonk, J. Voltage Profiles Improvement in a Power Network with PV Energy Sources—Results of a Voltage Regulator Implementation. Energies 2022, 15, 723. [Google Scholar] [CrossRef]
- Momeneh, A.; Castilla, M.; Miret, J.; Martí, P.; Velasco, M. Comparative study of reactive power control methods for photovoltaic inverters in low voltage grids. IET Renew. Power Gener. 2016, 10, 310–318. [Google Scholar] [CrossRef] [Green Version]
- Karuppusamy, P.; Vijayakumar, G.; Sathishkumar, S. Certain Investigation on Multilevel Inverters for Photovoltaic Grid Connected System. J. Circuits Syst. Comput. 2016, 25, 1650108. [Google Scholar] [CrossRef]
- Souza, I.; de Almeida, P.M.; Barbosa, P.G.; Duque, C.A.; Ribeiro, P.F. Digital single voltage loop control of a VSI with LC output filter. Sustain. Energy Grids Netw. 2018, 16, 145–155. [Google Scholar] [CrossRef]
- Riquelme-Dominguez, J.M.; Riquelme, J.; Martinez, S. New Trends in the Control of Grid-Connected Photovoltaic Systems for the Provision of Ancillary Services. Energies 2022, 15, 7934. [Google Scholar] [CrossRef]
- Kumar, N.; Saha, T.K.; Dey, J. Sliding mode control, implementation, and performance analysis of standalone PV fed dual inverter. Sol. Energy 2017, 155, 1178–1187. [Google Scholar]
- Kumar, N.; Saha, T.K.; Dey, J. Sliding-Mode Control of PWM Dual Inverter-Based Grid-Connected PV System: Modeling and Performance Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 435–444. [Google Scholar] [CrossRef]
- Flota-Bañuelos, M.; Miranda-Vidales, H.; Fernández, B.; Ricalde, L.J.; Basam, A.; Medina, J. Harmonic Compensation via Grid-Tied Three-Phase Inverter with Variable Structure I&I Observer-Based Control Scheme. Energies 2022, 15, 6419. [Google Scholar]
- Fernão Pires, V.; Martins, J.F.; Hao, C. Dual-inverter for grid-connected photovoltaic system: Modeling and sliding mode control. Sol. Energy 2012, 86, 2106–2115. [Google Scholar] [CrossRef]
- Maaoui-Ben Hassine, I.; Naouar, M.W.; Mrabet-Bellaaj, N. Model predictive-sliding mode control for three-phase grid-connected converters. IEEE Trans. Ind. Electron. 2017, 64, 1341–1349. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. General design issues of sliding-mode controllers in DC-DC converters. IEEE Trans. Ind. Electron. 2008, 55, 1160–1174. [Google Scholar]
- Dhar, S.; Dash, P.K. A new backstepping finite-time sliding mode control of grid-connected PV system using multivariable dynamic VSC model. Int. J. Electr. Power Energy Syst. 2016, 82, 314–330. [Google Scholar] [CrossRef]
- Reveles-Miranda, M.; Sánchez-Flórez, D.F.; Cruz-Chan, J.R.; Ordoñez-López, E.E.; Flota-Bañuelos, M.; Pacheco-Catalán, D. The Control Scheme of the Multifunction Inverter for Power Factor Improvement. Energies 2018, 11, 1662. [Google Scholar] [CrossRef] [Green Version]
- Reveles-Miranda, M.; Flota-Banuelos, M.; Chan-Puc, F.; Ramirez-Rivera, V.; Pacheco-Catalan, D. A Hybrid control technique for harmonic elimination, power factor correction, and night operation of a grid-connected PV inverter. IEEE J. Photovolt. 2020, 10, 664–675. [Google Scholar] [CrossRef]
- Gaballah, M.; El-Bardini, M. Low-cost digital signal generation for driving space vector PWM inverter. Ain Shams Eng. J. 2013, 4, 763–774. [Google Scholar]
- Ahmad, Z.; Singh, S.N. Improved modulation strategy for single phase grid connected transformerless PV inverter topologies with reactive power generation capability. Sol. Energy 2018, 163, 356–375. [Google Scholar] [CrossRef]
- Iqbal, A.; Meraj, M.; Tariq, M.; Lodi, K.A.; Maswood, A.I.; Rahman, S. Experimental Investigation and Comparative Evaluation of Standard Level Shifted Multi-Carrier Modulation Schemes with a Constraint GA Based SHE Techniques for a Seven-Level PUC Inverter. IEEE Access 2019, 7, 100605–100617. [Google Scholar] [CrossRef]
- Bayhan, S.; Komurcugil, H. Sliding-Mode Control Strategy for Three-Phase Three-Level T-Type Rectifiers with DC Capacitor Voltage Balancing. IEEE Access 2020, 8, 64555–64564. [Google Scholar] [CrossRef]
- Meng, Z.; Shao, W.; Tang, J.; Zhou, H. Sliding-Mode Control Based on Index Control Law for MPPT in Photovoltaic Systems. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2018, 2, 303–311. [Google Scholar] [CrossRef]
- Garrido, A.J.; Garrido, I.; Amundarain, M.; Alberdi, M.; De La Sen, M. Sliding-mode control of wave power generation plants. IEEE Trans. Ind. Appl. 2012, 48, 2372–2381. [Google Scholar] [CrossRef]
- Mostafa, M.R.; Saad, N.H.; El-sattar, A.A. Tracking the maximum power point of PV array by sliding mode control method. Ain Shams Eng. J. 2020, 11, 119–131. [Google Scholar] [CrossRef]
- Dasgupta, S.; Sahoo, S.K.; Xu, J.X.; Panda, S.K. A chattering free Lyapunov function based sliding mode controller applied to single-phase series connected PV inverter for grid voltage compensation. In Proceedings of the IECON 2010 (Industrial Electronics Conference), Glendale, AZ, USA, 7–10 November 2010. [Google Scholar]
- Tran, V.T.; Sutanto, D.; Muttaqi, K.M. Simple structure for reactive power control of AC photovoltaic modules, 2015 Australasian Universities Power Engineering Conference: Challenges for Future Grids. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC), Wollongong, NSW, Australia, 27–30 September 2015. [Google Scholar]
- Crowhurst, B.; El-Saadany, E.F.; Chaar, L.E.; Lamont, L.A. Single-phase grid-tie inverter control using DQ transform for active and reactive load power compensation. In Proceedings of the IEEE International Conference on Power and Energy, Kuala Lumpur, Malaysia, 29 November–1 December 2010. [Google Scholar]
- Waqas, M.; Ahmed, T.; Elavarasan, R.M.; Waqar, A.; Leong, K.; Pugazhendhi, R.; Narottam Das, N.; Jeelani, M.W. DQ Transformation Based Control of Single-Phase Grid-Tied Inverter. In Proceedings of the 31st IEEE Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 26–30 September 2021. [Google Scholar]
- Yilmaz, M.; Kayabasi, E.; Akbaba, M. Determination of the effects of operating conditions on the output power of the inverter and the power quality using an artificial neural network. Eng. Sci. Technol. Int. J. 2019, 22, 1068–1076. [Google Scholar] [CrossRef]
- DOF—Diario Oficial de la Federación, 31 de Diciembre del 2015. Available online: http://dof.gob.mx/index.php?year=2004&month=01&day=23 (accessed on 13 July 2019).
- Ozdemir, S.; Bayhan, S.; Sefa, I.; Altin, N. Three-phase multilevel grid-interactive inverter for PV systems with reactive power support capability. In Proceedings of the 1st Workshop on Smart Grid and Renewable Energy, SGRE 2015, Doha, Qatar, 22–23 March 2015. [Google Scholar]
- Varma, R.K.; Akbari, M. Simultaneous Fast Frequency Control and Power Oscillation Damping by Utilizing PV Solar System as PV-STATCO. IEEE Trans. Sustain. Energy 2020, 11, 415–425. [Google Scholar] [CrossRef]
- Roselyn, J.P.; Chandran, C.P.; Nithya, C.; Devaraj, D.; Venkatesan, R.; Gopal, V.; Madhura, S. Design and implementation of fuzzy logic based modified real-reactive power control of inverter for low voltage ride through enhancement in grid-connected solar PV system. Control Eng. Pract. 2020, 101, 104494. [Google Scholar] [CrossRef]
- Merabet, A.; Labib, L.; AGhias, M.Y.M.; Ghenai, C.; Salameh, T. Robust Feedback Linearizing Control with Sliding Mode Compensation for a Grid-Connected Photovoltaic Inverter System under Unbalanced Grid Voltages. IEEE J. Photovolt. 2017, 7, 828–838. [Google Scholar] [CrossRef]
- Mosaad, M.I. Model reference adaptive control of STATCOM for grid integration of wind energy systems. IET Electr. Power Appl. 2018, 12, 605–613. [Google Scholar] [CrossRef]
- Haw, L.K.; Dahidah, M.S.A.; Almurib, H.A.F. A new reactive current reference algorithm for the STATCOM system based on cascaded multilevel inverters. IEEE Trans. Power Electron. 2015, 30, 3577–3588. [Google Scholar] [CrossRef]
- Torres, I.; Muñoz, J.; Rojas, D.; Espinosa, E.E. Selective Harmonic Elimination Technique for a 27-Level Asymmetric Multilevel Converter. Energies 2022, 15, 3694. [Google Scholar] [CrossRef]
- Callegari, J.M.S.; Silva, M.P.; de Barros, R.C.; Brito, E.M.S.; Cupertino, A.F.; Pereira, H.A. Lifetime evaluation of three-phase multifunctional PV inverters with reactive power compensation. Electr. Power Syst. Res. 2019, 175, 105873. [Google Scholar] [CrossRef]
- de Barros, R.C.; Brito, E.M.S.; Rodrigues, G.G.; Mendes, V.F.; Cupertino, A.F.; Pereira, H.A. Lifetime evaluation of a multifunctional PV single-phase inverter during harmonic current compensation. Microelectron. Reliab. 2018, 88–90, 1071–1076. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, H.; Ding, Y.; Luo, H.; Liu, T.; Tan, Q. Collaborative Control Strategy of Power Quality Based on Residual Capacity of Photovoltaic Inverter. Energies 2022, 15, 8049. [Google Scholar] [CrossRef]
- Satapathy, A.; Nayak, N.; Parida, T. Real-Time Power Quality Enhancement in a Hybrid Micro-Grid Using Nonlinear Autoregressive Neural Network. Energies 2022, 15, 9081. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, Z.; Xu, D.; Ji, J.; Zhao, P. Unity power factor fault-tolerant control of linear permanent-magnet vernier motor fed by a floating bridge multilevel inverter with switch fault. IEEE Trans. Ind. Electron. 2018, 65, 9113–9123. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Name | Value |
|---|---|---|
| Grid peak voltage | ||
| Array panel voltage | ||
| Load peak current | ||
| Power factor load | ||
| Capacitor | ||
| Resistor | ||
| Inductor |
| Parameter | Symbol | Value |
|---|---|---|
| Integral gain voltage control | ||
| Proportionall gain voltage control | ||
| Day gain current control | ||
| Night gain current control | ||
| Reference current control | ||
| Sampling frequency | ||
| Capacitor voltage reference | ||
| Array panel current estimator |
| Parameter | Name | Value |
|---|---|---|
| Integral gain voltage control | ||
| Proportional gain voltage control | ||
| Day gain current control | ||
| Night gain current control | ||
| Reference capacitor voltage | ||
| Sampling frequency | ||
| Array panel current estimator |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Flota-Bañuelos, M.; Espinosa-Trujillo, M.; Cruz-Chan, J.; Kamal, T. Experimental Study of an Inverter Control for Reactive Power Compensation in a Grid-Connected Solar Photovoltaic System Using Sliding Mode Control. Energies 2023, 16, 853. https://doi.org/10.3390/en16020853
Flota-Bañuelos M, Espinosa-Trujillo M, Cruz-Chan J, Kamal T. Experimental Study of an Inverter Control for Reactive Power Compensation in a Grid-Connected Solar Photovoltaic System Using Sliding Mode Control. Energies. 2023; 16(2):853. https://doi.org/10.3390/en16020853
Chicago/Turabian StyleFlota-Bañuelos, Manuel, María Espinosa-Trujillo, José Cruz-Chan, and Tariq Kamal. 2023. "Experimental Study of an Inverter Control for Reactive Power Compensation in a Grid-Connected Solar Photovoltaic System Using Sliding Mode Control" Energies 16, no. 2: 853. https://doi.org/10.3390/en16020853