
Frequency Regulation of Electric Vehicle Aggregator Considering User Requirements with Limited Data Collection


Abstract
:1. Introduction
- (1)
- The limited data collection causes the data deficiency in the EV user’s requirements for traveling and regulation preference. This data deficiency adds the difficulty to featuring the regulation characteristic of aggregated EVs. A probabilistic evaluation model of an EV aggregator is developed to evaluate the available regulation capacity under different regulation modes with the limited data acquisition of EVs.
- (2)
- The limited data collection incurs an uncertain power regulation in the EV aggregator and directly affects the regulation accuracy for the system frequency. A frequency regulation with the EV aggregator is developed with probabilistic control and error correction to improve the frequency regulation performance.
- (3)
- The frequency regulation with the EV aggregator affects the original charging schedules and the preferred charging requirements of EVs. Progressive regulation recovery is proposed to ensure regulation requirements of EVs during frequency regulation. The influence on charging preferences for EVs is reduced by coordinating the EV aggregator with conventional generation.
2. Modeling for Regulation Characteristics of the EV Aggregator
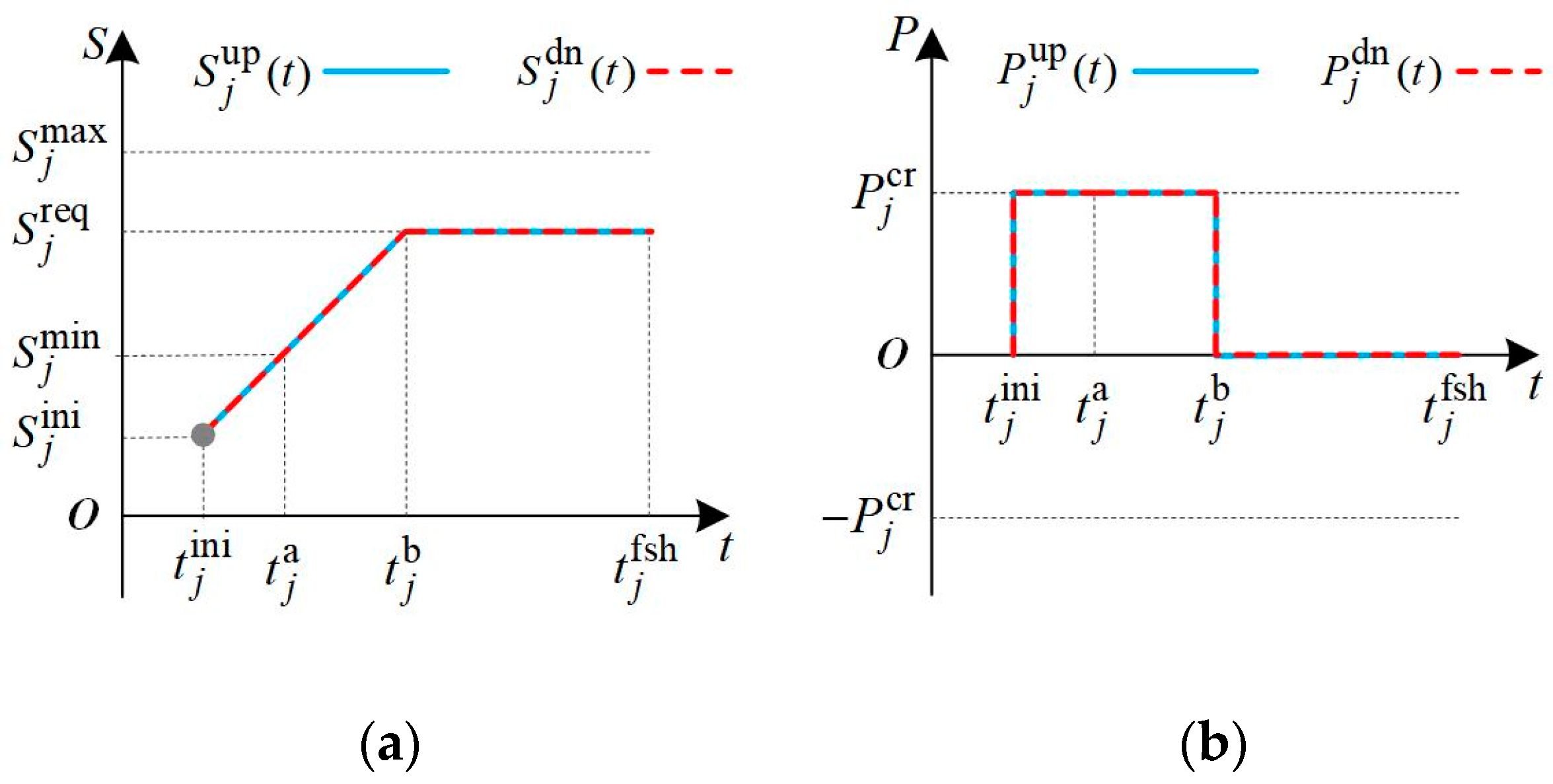
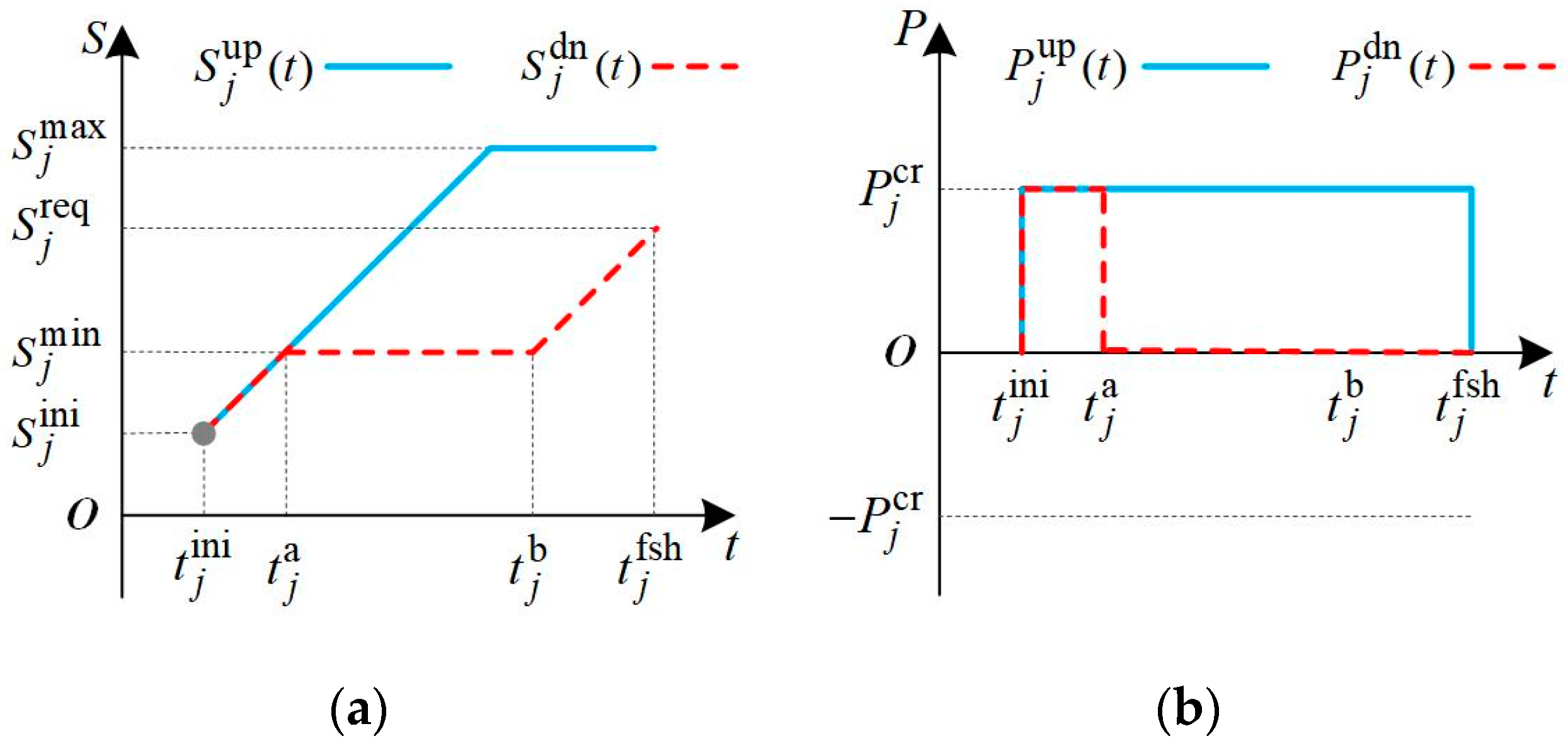
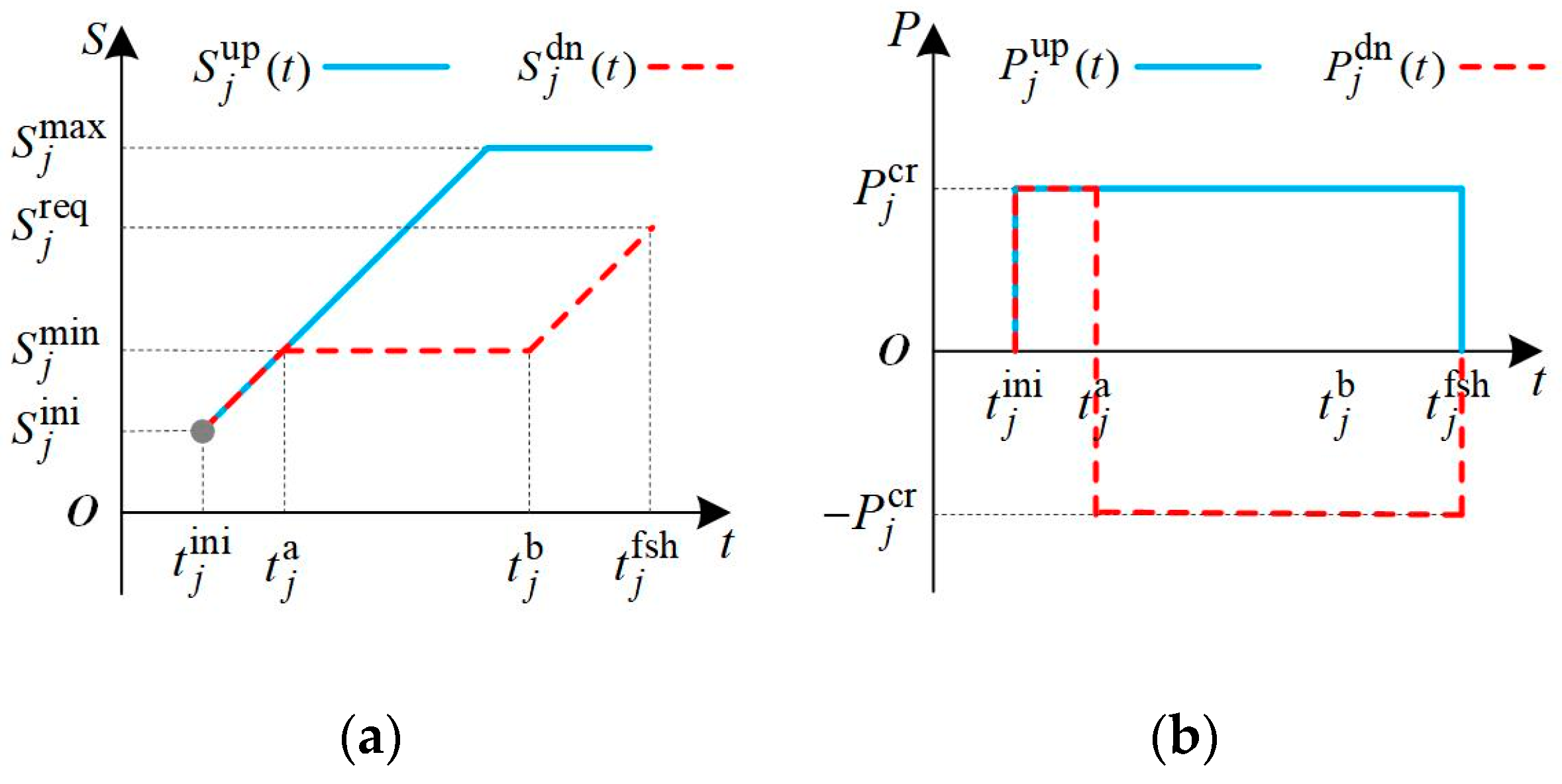
2.1. Regulation Characteristics of an EV
2.2. Regulation Requirements of the EV User
- (1)
- Requirement for traveling
- (2)
- Requirement for regulation preference
- (3)
- Regulation capacity of an EV under different requirements
2.3. Regulation Capacity of EVs with Limited Data Collection
- (1)
- Regulation capacity evaluation of the EV aggregator with limited data
- (2)
- Regulation requirement insurance for individual EVs at the charging terminal
3. Frequency Regulation Strategy with the EV Aggregator
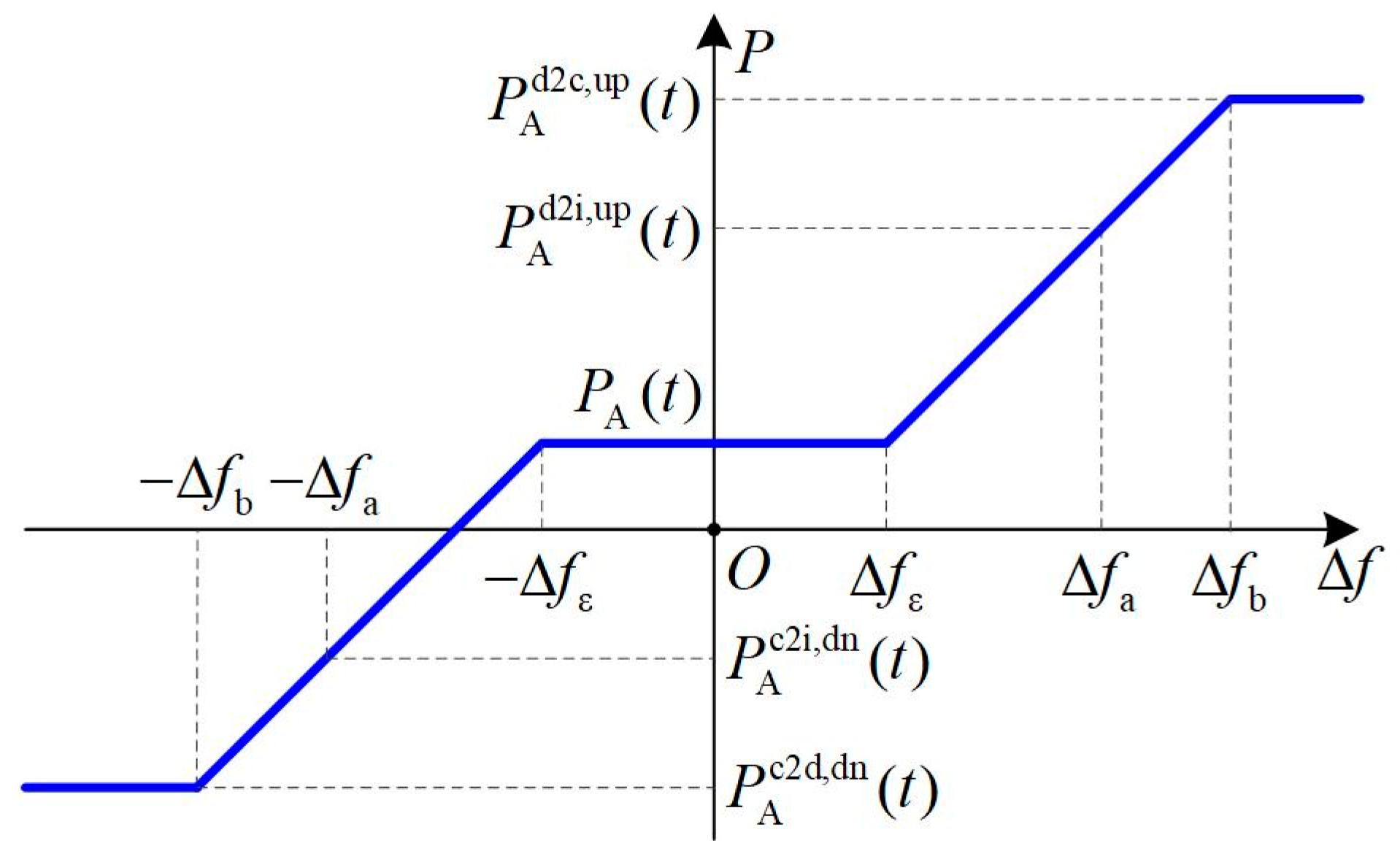
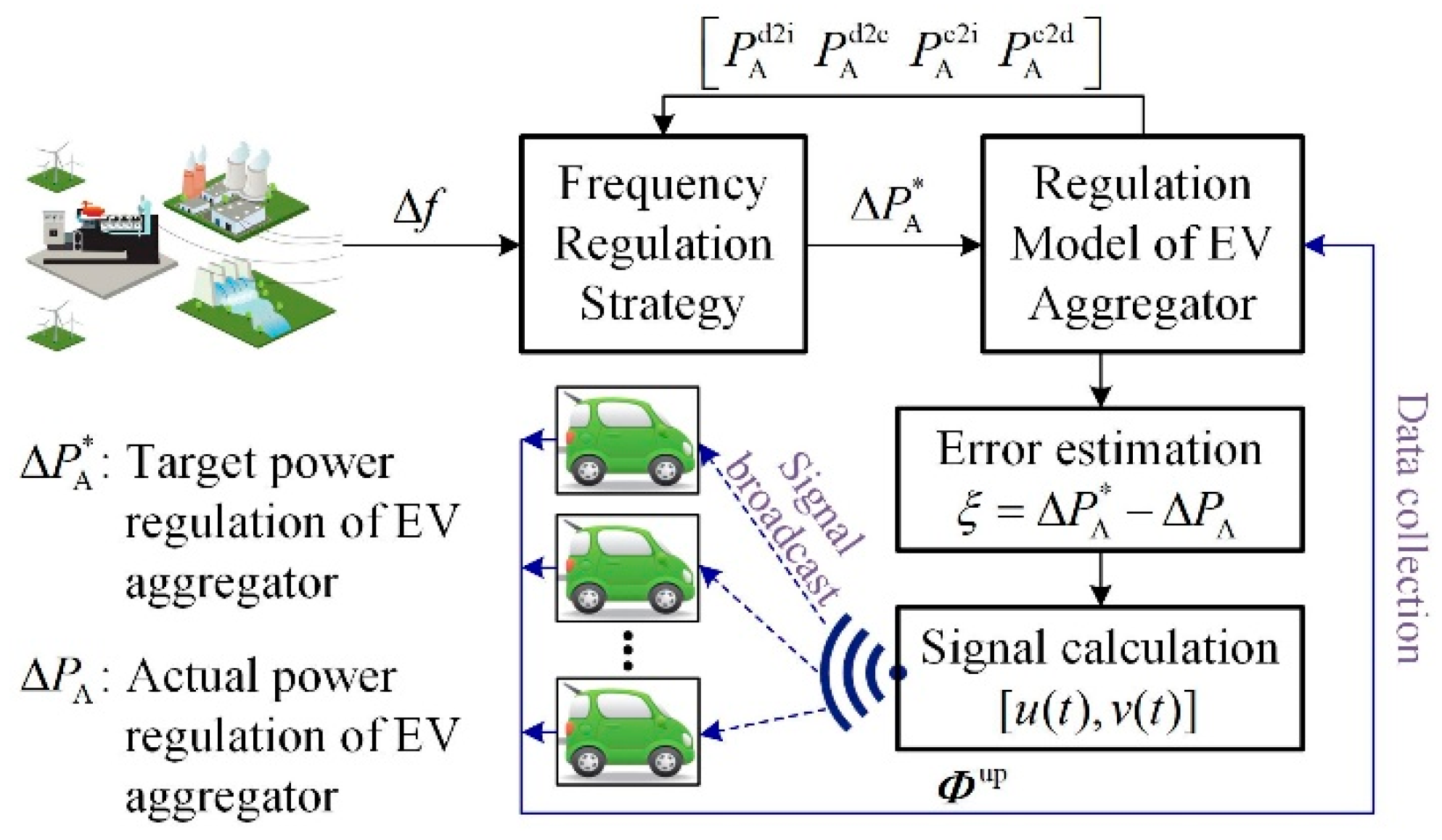
3.1. Frequency Regulation Characteristics of the EV Aggregator
3.2. Frequency Regulation Strategy with the EV Aggregator
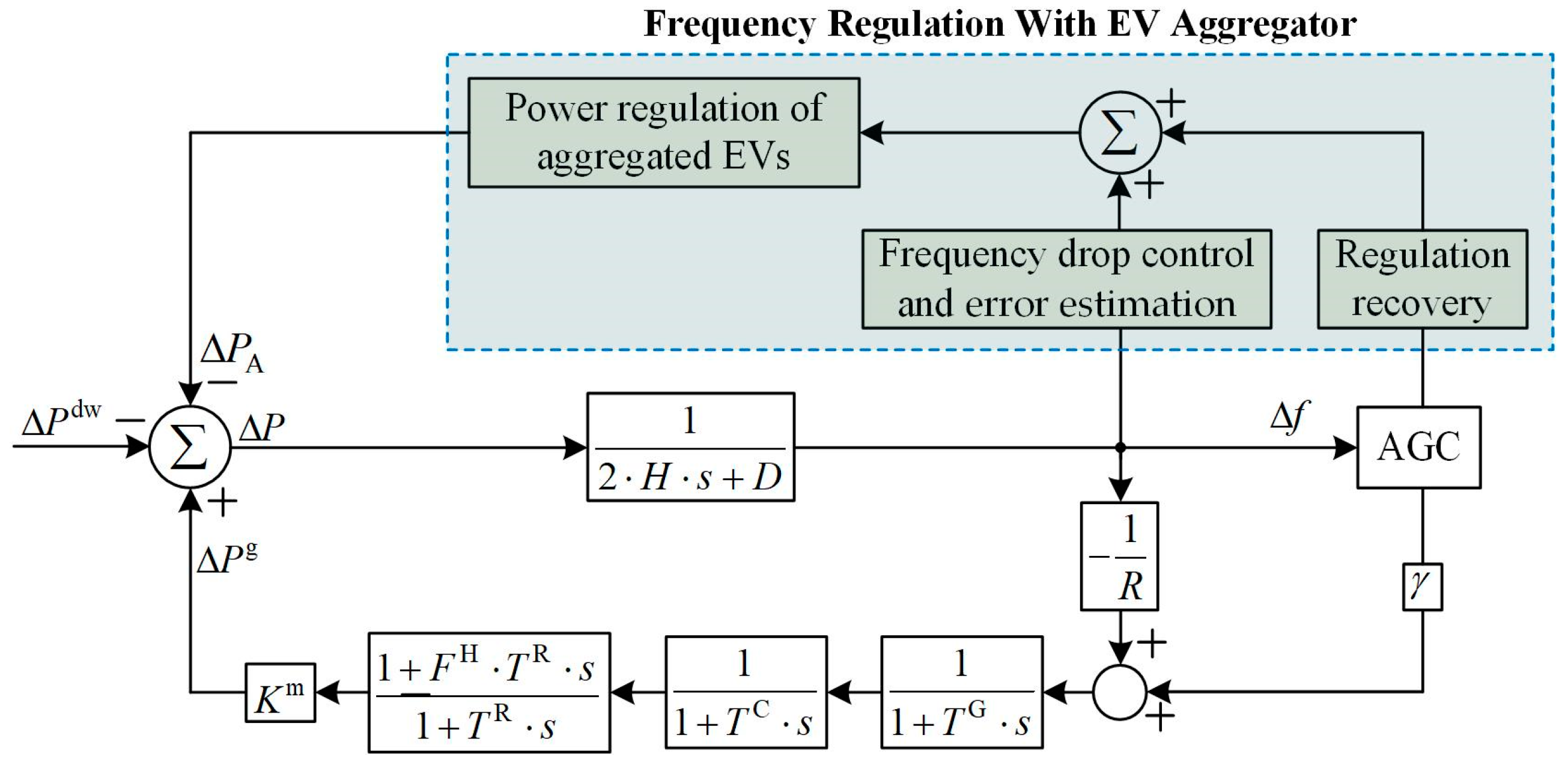
3.2.1. Frequency Regulation with the EV Aggregator
3.2.2. Regulation Error Estimation for the EV Aggregator
3.2.3. Regulation Recovery of the EV Aggregator
4. Case Study and Analysis
4.1. Case Scenario
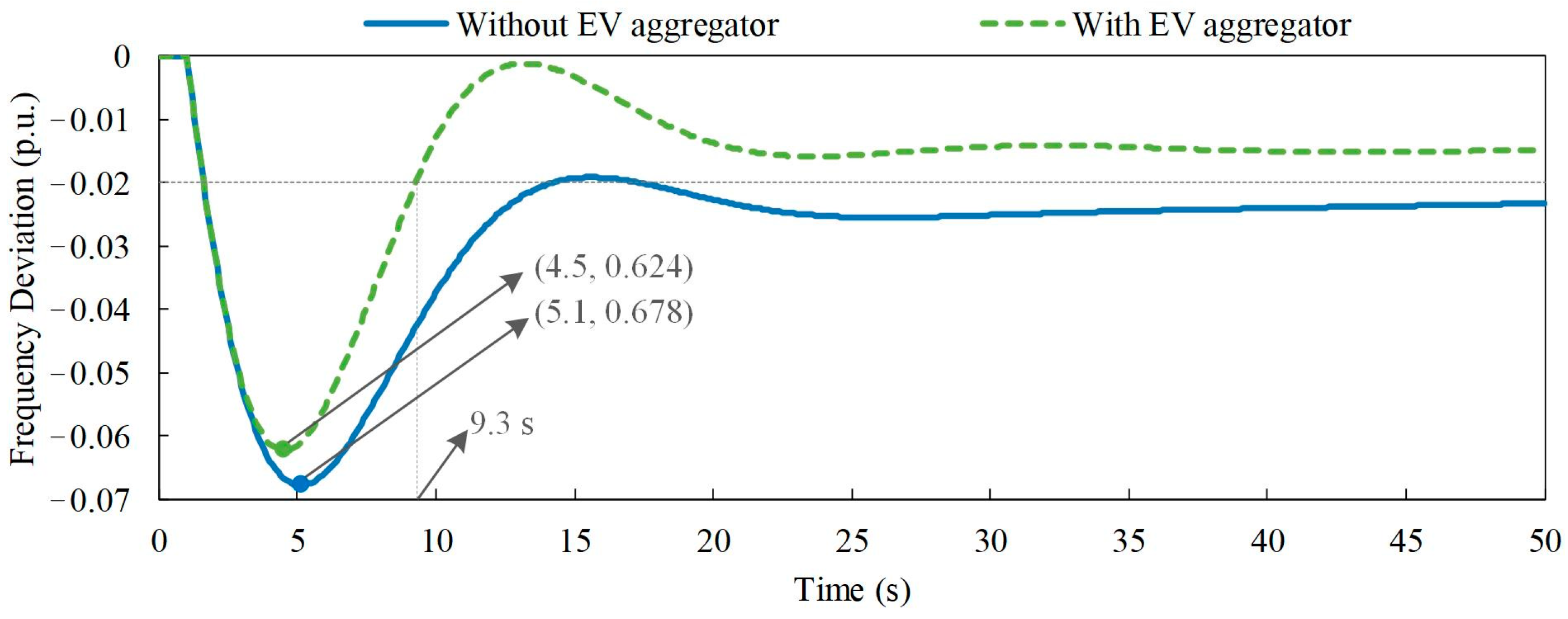
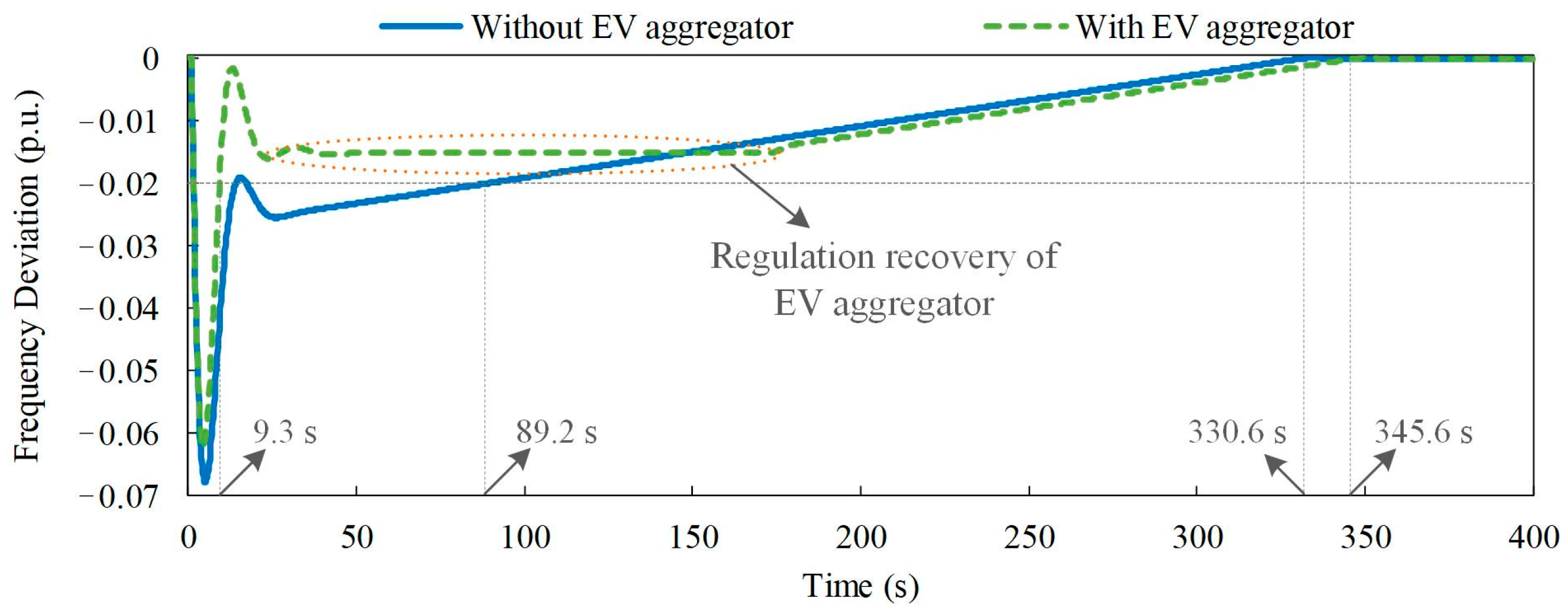
4.2. Study Results
5. Conclusions
- (1)
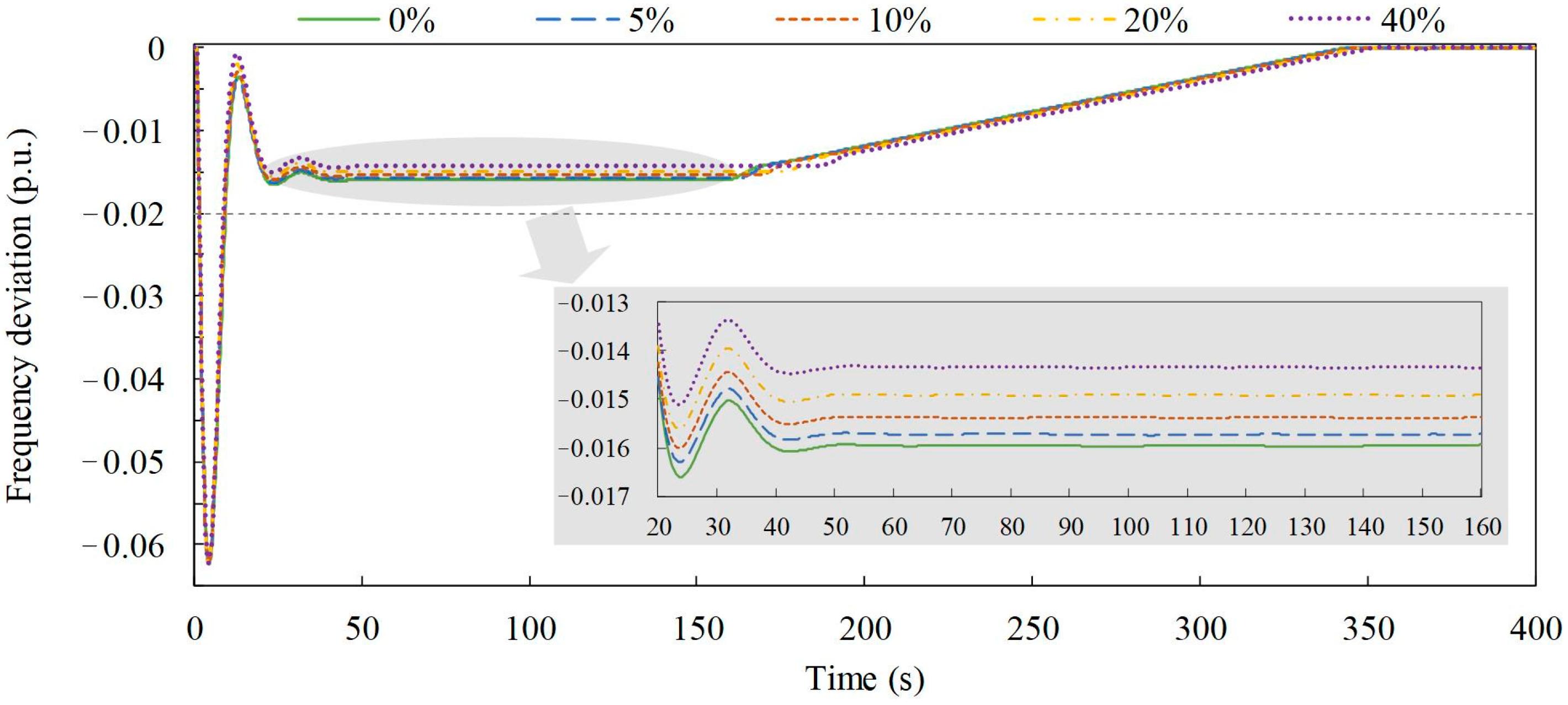
- When a frequency deviation occurs, the proposed frequency regulation strategy can effectively recover the system frequency to the allowable variation range and help improve the frequency stability of the power system.
- (2)
- With limited data collection, the regulation capacity of the EV aggregator is estimated without acquiring the data for EV traveling, battery state, and regulation preferences. During frequency regulation, the error correction control for the EV aggregator is developed to decrease the influence from the estimation error, and the regulation requirements for each EV are ensured with the self-adaptive probabilistic control at the EV charger.
- (3)
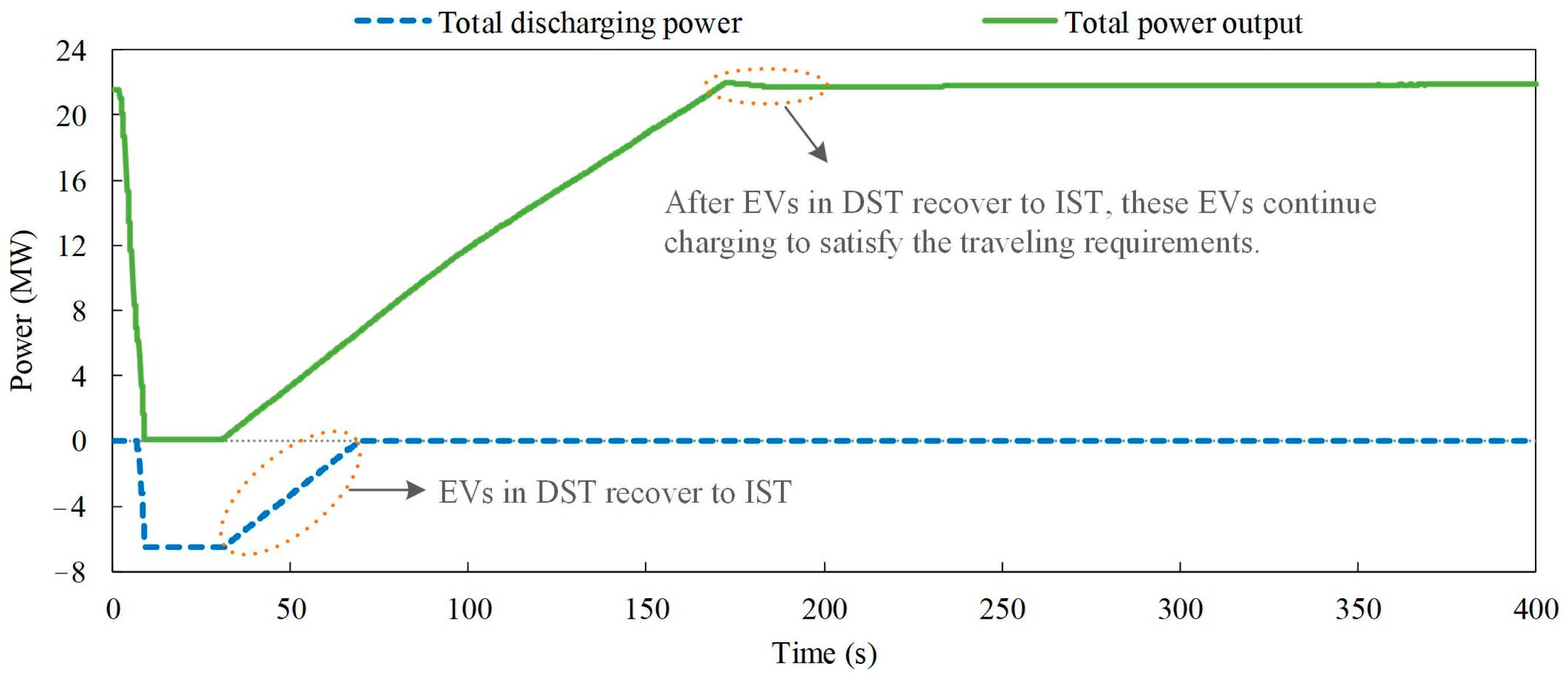
- With the simplified probabilistic control signal and conventional generation, the time delay is added to recover the controlled EVs to their own original connecting state. During the frequency recovery, the system frequency varies steadily without the secondary disturbance from the simultaneous state switch of controlled EVs for recovery.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations: | |
| EV | Electric vehicle. |
| SOC | State of charge. |
| CST | Charging state. |
| IST | Idle state. |
| DST | Discharging state. |
| UST | Unused state. |
| C2I | Control action from CST to IST. |
| I2D | Control action from IST to DST. |
| D2I | Control action from DST to IST. |
| I2C | Control action from IST to CST. |
| C2D | Control action from CST to IST and then IST to DST. |
| Parameters of indices: | |
| t | Index of time instants. |
| Time interval. | |
| j | Index of EV chargers. |
| Parameters of individual EV and EV charger: | |
| EV battery capacity. | |
| EV rated charging/discharging power. | |
| EV charging/discharging efficiency. | |
| Indicator of the connecting state of EV charger. | |
| EV connecting time instant with EV charger. | |
| Time instant for EV connection at the EV charger. | |
| EV leaving time instant from EV charger. | |
| EV initial SOC when connecting the EV charger. | |
| Required SOC for EV traveling. | |
| Minimum/maximum SOC of EV for frequency regulation. | |
| EV charging laxity. | |
| Binary indicators for EV preference for C2I and I2C/I2D and D2I. | |
| Available regulation capacity from C2I/I2D for power decrease. | |
| Available regulation capacity from D2I/I2C for power increase. | |
| Real-time power output of EV charger. | |
| Upper/Lower boundary of EV’s power regulation range. | |
| Real-time SOC of EV battery at the EV charger. | |
| Upper/lower boundary of EV’s SOC variation range. | |
| Indicator of EV for control action of connecting state. | |
| Binary indicator of EV of switching into the forced CST. | |
| Parameters of EV aggregator: | |
| Set of indices of all EV chargers in the EV aggregator. | |
| Set of indices of EV chargers in CST/IST in the EV aggregator. | |
| Set of indices of EV chargers in DST/UST in the EV aggregator. | |
| Number of EVs in CST/IST in the EV aggregator. | |
| Number of EVs in DST/UST in the EV aggregator. | |
| Set of indices of EV chargers with C2I/I2C control. | |
| Set of indices of EV chargers with I2D/C2D control. | |
| Number of EV chargers with C2I/I2C control. | |
| Number of EV chargers with I2D/C2D control. | |
| Power output of EV aggregator. | |
| Regulation capacity of EV aggregator with D2I. | |
| Regulation capacity of EV aggregator with D2I and I2C. | |
| Regulation capacity of EV aggregator with C2I. | |
| Regulation capacity of EV aggregator with C2I and I2D. | |
| Parameters of frequency regulation: | |
| System frequency deviation. | |
| , | Frequency regulation coefficients. |
| Allowable variation range of system frequency. | |
| [u(t), v(t)] | Probabilistic control signal for EV aggregator. |
| Target power regulation of EV aggregator | |
| Required power regulation with C2I. | |
| Required power regulation with I2D. | |
| Required power regulation with D2I. | |
| Required power regulation with I2C. | |
References
- Li, J.; Gao, Z.; Mu, G.; Fan, X.; Zhang, Z.; Zou, J. Research on the Control Strategy of Energy Storage Participation in Power System Frequency Regulation. Int. Trans. Electr. Energ. Syst. 2020, 27, 12676. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, Z.; Song, Y. Hour-Ahead Optimization Strategy for Shared Energy Storage of Renewable Energy Power Stations to Provide Frequency Regulation Service. IEEE Trans. Sustain. Energy 2022, 13, 2331–2342. [Google Scholar] [CrossRef]
- Li, S.; Lu, J.; Qin, S.; Hu, Y.; Fang, F. Data-Driven Lumped Dynamic Modelling of Wind Farm Frequency Regulation Characteristics. IET Cyber-Phys. Syst. 2022, 7, 147–156. [Google Scholar] [CrossRef]
- Global EV Outlook 2022. International Energy Agency. Available online: https://www.iea.org/reports/global-ev-outlook-2022 (accessed on 15 October 2022).
- Wu, F.; Yang, J.; Zhan, X.; Liao, S.; Xu, J. The Online Charging and Discharging Scheduling Potential of Electric Vehicles Considering the Uncertain Responses of Users. IEEE Trans. Power Syst. 2021, 36, 1794–1806. [Google Scholar] [CrossRef]
- Ye, Z.; Gao, Y.; Yu, N. Learning to Operate an Electric Vehicle Charging Station Considering Vehicle-Grid Integration. IEEE Trans. Smart Grid 2022, 13, 3038–3048. [Google Scholar] [CrossRef]
- Hoque, M.M.; Khorasany, M.; Razzaghi, R.; Jalili, M.; Wang, H. Network-Aware Coordination of Aggregated Electric Vehicles Considering Charge-Discharge Flexibility. IEEE Trans. Smart Grid 2022, 1–15. [Google Scholar] [CrossRef]
- Coban, H.H.; Lewicki, W.; Sendek-Matysiak, E.; Łosiewicz, Z.; Drożdż, W.; Miśkiewicz, R. Electric Vehicles and Vehicle–Grid Interaction in the Turkish Electricity System. Energies 2022, 15, 8218. [Google Scholar] [CrossRef]
- Tripathi, S.; Singh, V.P.; Kishor, N.; Pandey, A. Load Frequency Control of Power System Considering Electric Vehicles’ Aggregator With Communication Delay. Int. J. Electr. Power Energy Syst. 2023, 145, 108697. [Google Scholar] [CrossRef]
- Diaz-Londono, C.; Vuelvas, J.; Gruosso, G.; Correa-Florez, C.A. Remuneration Sensitivity Analysis in Prosumer and Aggregator Strategies by Controlling Electric Vehicle Chargers. Energies 2022, 15, 6913. [Google Scholar] [CrossRef]
- Wang, M.; Mu, Y.; Li, F.; Jia, H.; Li, X.; Shi, Q.; Jiang, T. State Space Model of Aggregated Electric Vehicles for Frequency Regulation. IEEE Trans. Smart Grid 2020, 11, 981–994. [Google Scholar] [CrossRef]
- Dong, C.; Xiao, Q.; Wang, M.; Morstyn, T.; McCulloch, M.D.; Jia, H. Distorted Stability Space and Instability Triggering Mechanism of EV Aggregation Delays in the Secondary Frequency Regulation of Electrical Grid-Electric Vehicle System. IEEE Trans. Smart Grid 2020, 11, 5084–5098. [Google Scholar] [CrossRef]
- Le, F.C.; Kara, E.C.; Moura, S. PDE Modeling and Control of Electric Vehicle Fleets for Ancillary Services: A Discrete Charging Case. IEEE Trans. Smart Grid 2018, 9, 573–581. [Google Scholar] [CrossRef]
- Guo, Z.; Zhou, Z.; Zhou, Y. Impacts of Integrating Topology Reconfiguration and Vehicle-to-Grid Technologies on Distribution System Operation. IEEE Trans. Sustain. Energy 2020, 11, 1023–1032. [Google Scholar] [CrossRef]
- Quijano, D.A.; Melgar-Dominguez, O.D.; Sabillon, C.; Venkatesh, B.; Padilha-Feltrin, A. Increasing Distributed Generation Hosting Capacity in Distribution Systems via Optimal Coordination of Electric Vehicle Aggregators. IET Gener. Transm. Distrib. 2021, 15, 359–370. [Google Scholar] [CrossRef]
- Amamra, S.A.; Marco, J. Vehicle-to-Grid Aggregator to Support Power Grid and Reduce Electric Vehicle Charging Cost. IEEE Access 2019, 7, 178528–178538. [Google Scholar] [CrossRef]
- Vatandoust, B.; Ahmadian, A.; Golkar, M.A.; Elkamel, A.; Almansoori, A.; Ghaljehei, M. Risk-Averse Optimal Bidding of Electric Vehicles and Energy Storage Aggregator in Day-Ahead Frequency Regulation Market. IEEE Trans. Power Syst. 2019, 34, 2036–2047. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, Q.; Li, Y.; Sun, T.; Yue, H. Hierarchical Distributed Frequency Regulation Strategy of Electric Vehicle Cluster Considering Demand Charging Load Optimization. IEEE Trans. Ind. Appl. 2022, 58, 720–731. [Google Scholar] [CrossRef]
- Liu, H.; Huang, K.; Wang, N.; Qi, J.; Wu, Q.; Ma, S.; Li, C. Optimal Dispatch for Participation of Electric Vehicles in Frequency Regulation Based on Area Control Error and Area Regulation Requirement. Appl. Energy 2019, 240, 46–55. [Google Scholar] [CrossRef]
- Liu, H.; Qi, J.; Wang, J.; Li, P.; Li, C.; Wei, H. EV Dispatch Control for Supplementary Frequency Regulation Considering the Expectation of EV Owners. IEEE Trans. Smart Grid 2018, 9, 3763–3772. [Google Scholar] [CrossRef] [Green Version]
- Kolawole, O.; Al-Anbagi, I. Electric Vehicles Battery Wear Cost Optimization for Frequency Regulation Support. IEEE Access 2019, 7, 130388–130398. [Google Scholar] [CrossRef]
- Cai, S.; Matsuhashi, R. Model Predictive Control for EV Aggregators Participating in System Frequency Regulation Market. IEEE Access 2021, 9, 80763–80771. [Google Scholar] [CrossRef]
- Wang, M.; Ge, L.; Dong, C.; Xiao, Q.; An, H.; Mu, Y. Smoothing Control of Wind Power Fluctuations With Battery Energy Storage System of Electric Vehicles. Int. Trans. Electr. Energy Syst. 2021, 31, e12606. [Google Scholar] [CrossRef]
- Kaur, K.; Singh, M.; Kumar, N. Multiobjective Optimization for Frequency Support Using Electric Vehicles: An Aggregator-Based Hierarchical Control Mechanism. IEEE Syst. J. 2019, 13, 771–782. [Google Scholar] [CrossRef]
- Ko, K.S.; Sung, D.K. The Effect of EV Aggregators With Time-Varying Delays on the Stability of a Load Frequency Control System. IEEE Trans. Power Syst. 2018, 33, 669–680. [Google Scholar] [CrossRef]
- Scarabaggio, P.; Carli, R.; Cavone, G.; Dotoli, M. Smart Control Strategies for Primary Frequency Regulation through Electric Vehicles: A Battery Degradation Perspective. Energies 2020, 13, 4586. [Google Scholar] [CrossRef]
- Yan, G.; Liu, D.; Li, J.; Mu, G. A Cost Accounting Method of the Li-ion Battery Energy Storage System for Frequency Regulation Considering the Effect of Life Degradation. Prot. Control. Mod. Power Syst. 2018, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Qian, K.; Allan, M.; Zhou, W. Modeling of the Cost of EV Battery Wear due to V2G Application in Power Systems. IEEE Trans. Energy Convers. 2011, 26, 1041–1050. [Google Scholar] [CrossRef]
- Farzin, H.; Fotuhi-Firuzabad, M.; Moeini-Aghtaie, M. A Practical Scheme to Involve Degradation Cost of Lithium-ion Batteries in Vehicle-to-Grid Applications. IEEE Trans. Sustain. Energy 2016, 7, 1730–1738. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Aki, H. A Practical Battery Wear Model for Electric Vehicle Charging Applications. Appl. Energy 2014, 113, 1100–1108. [Google Scholar] [CrossRef]
- Liu, C.; Wang, X.; Wu, X.; Guo, J. Economic Scheduling Model of Microgrid Considering the Lifetime of Batteries. IET Gener. Transm. Distrib. 2017, 11, 759–767. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Hoque, M.M.; Ker, P.J.; Saad, M.H.M.; Ayob, A. A Review of State of Health and Remaining Useful Life Estimation Methods for Lithium-ion Battery in Electric Vehicles: Challenges and Recommendations. J. Clean. Prod. 2018, 205, 115–133. [Google Scholar] [CrossRef]
- Stroe, D.I.; Knap, V.; Swierczynski, M.; Stroe, A.I.; Teodorescu, R. Operation of a Grid-Connected Lithium-ion Battery Energy Storage System for Primary Frequency Regulation: A Battery Lifetime Perspective. IEEE Trans. Ind. Appl. 2017, 53, 430–438. [Google Scholar] [CrossRef]
- Song, M.; Amelin, M. Purchase Bidding Strategy for a Retailer With Flexible Demands in Day-Ahead Electricity Market. IEEE Trans. Power Syst. 2017, 32, 1839–1850. [Google Scholar] [CrossRef]
- Shi, Q.; Cui, H.; Li, F.; Liu, Y.; Ju, W.; Sun, Y. A Hybrid Dynamic Demand Control Strategy for Power System Frequency Regulation. CSEE J. Power Energy Syst. 2017, 3, 176–185. [Google Scholar] [CrossRef]
- Aik, D.L.H. A General-Order System Frequency Response Model Incorporating Load Shedding: Analytic Modeling and Applications. IEEE Trans. Power Syst. 2006, 21, 709–717. [Google Scholar] [CrossRef]
- Sigrist, L.; Egido, I.; Rouco, L. A Method for the Design of UFLS Schemes of Small Isolated Power Systems. IEEE Trans. Power Syst. 2012, 27, 951–958. [Google Scholar] [CrossRef]
- Shi, Q.; Li, F.; Cui, H. Analytical Method to Aggregate Multi-Machine SFR Model With Applications in Power System Dynamic Studies. IEEE Trans. Power Syst. 2018, 33, 6355–6367. [Google Scholar] [CrossRef]
- Yao, W.; Zhao, J.; Wen, F.; Xue, Y.; Ledwich, G. A Hierarchical Decomposition Approach for Coordinated Dispatch of Plug-in Electric Vehicles. IEEE Trans. Power Syst. 2013, 28, 2768–2778. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. Distributed Charge Scheduling of Plug-in Electric Vehicles Using Inter-Aggregator Collaboration. IEEE Trans. Smart Grid 2017, 8, 331–341. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, W.; Wen, F.; Salam, A.; Mao, J.; Li, L. Bidding Strategy for Aggregators of Electric Vehicles in Day-Ahead Electricity Markets. Energies 2017, 10, 144. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Sezaki, K. Estimation of Achievable Power Capacity From Plug-in Electric Vehicles for V2G Frequency Regulation: Case Studies for Market Participation. IEEE Trans. Smart Grid 2011, 2, 632–641. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Inertia constant H | 4.44 s |
| Load damping coefficient D | 1.0 |
| Governor speed regulation R | 0.09 |
| Governor time constant TG | 0.2 s |
| Steam chest time constant TC | 0.3 s |
| Reheat time constant TR | 12 s |
| High-pressure turbine fraction FH | 0.17 |
| Mechanical power gain factor Km | 1.0 |
| Allowable frequency deviation | 0.02 |
| Parameter | Value/Distribution |
|---|---|
| Connecting time instant with power grid | N (−6.5, 3.4)∈[0, 5.5] N (17.5, 3.4)∈[5.5, 24] |
| Disconnecting time instant with power grid | N (8.9, 3.4)∈[0, 20.9] N (32.9, 3.4)∈[20.9, 24] |
| Initial SOC at connecting time instant | N (0.3, 0.05)∈[0.2, 0.4] |
| Required SOC for traveling | N (0.8, 0.03)∈[0.7, 0.9] |
| Minimum/maximum SOC value / | 1.0/0.1 |
| Battery capacity Qj | U (20.0, 30.0) kWh |
| Rated charging/discharging power / | U (5.0, 7.0) kW |
| Charging/discharging efficiency / | U (0.88, 0.95) |
| Proportion of EVs for only participating C2I and I2C/proportion of EVs for participating all four frequency regulation modes / | 0.4/0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, F.; Wei, Z.; Sun, G.; Wang, M.; Han, H. Frequency Regulation of Electric Vehicle Aggregator Considering User Requirements with Limited Data Collection. Energies 2023, 16, 848. https://doi.org/10.3390/en16020848
Zeng F, Wei Z, Sun G, Wang M, Han H. Frequency Regulation of Electric Vehicle Aggregator Considering User Requirements with Limited Data Collection. Energies. 2023; 16(2):848. https://doi.org/10.3390/en16020848
Chicago/Turabian StyleZeng, Fei, Zhinong Wei, Guoqiang Sun, Mingshen Wang, and Haiteng Han. 2023. "Frequency Regulation of Electric Vehicle Aggregator Considering User Requirements with Limited Data Collection" Energies 16, no. 2: 848. https://doi.org/10.3390/en16020848