1. Introduction
As key components of an induction motor (IM), bearings are prone to failure, with a probability of up to 40–60% [
1,
2], which makes the diagnosis of bearing faults in IMs particularly important.
Vibration-signal-based bearing fault diagnosis methods are the most widely used at present [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17]. Although stator-current-based methods have been rapidly developed in recent decades, they have poorer diagnosis performance [
9,
17]. Thus, vibration-signal-based bearing fault diagnosis methods are the focus of this paper. Through monitoring the time-domain indexes and analyzing the frequency spectrum of vibration signals, fault diagnosis can be carried out. Experience indicates that the kurtosis coefficient
Ku of the vibration acceleration signal and the root mean square (RMS) value
V of the vibration velocity signal are both sensitive to faults, and they have good robustness to changes in working conditions. Therefore, these two time-domain indexes are widely used in bearing fault diagnosis.
The time-domain parameter monitoring method is simple and effective to some extent, but it can only diagnose whether the bearing is faulty or healthy and it cannot determine the fault type. Therefore, vibration acceleration spectrum analysis is required to determine the fault type by investigating the characteristic frequency components of the bearing fault.
Bearing fault characteristics are generally reflected in vibration signals with frequencies lower than 1 kHz. In practice, many low-frequency structural vibration signals are caused by mechanical loosening, improper assembly, and other factors, which seriously affect the bearing fault characteristics. To eliminate such interference and highlight the bearing fault characteristics, resonance demodulation is employed. The methods presented in [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16] are derived from the resonance demodulation spectrum analysis of vibration signals.
A thorough review of vibration-based bearing health indicators constructed from mechanical signal processing, modeling, and machine learning is provided in [
4]. A kurtogram was used to select the optimal demodulation frequency band containing the maximum impulsivity related to bearing faults in [
5,
6]. A traverse symplectic correlation-gram was proposed in [
7] to achieve the optimal demodulation frequency band selection. A mathematical morphological filter and Hilbert–Huang transformation were used in [
8] to improve the accuracy of bearing fault detection. Vibration envelope analysis was combined with stator current analysis in [
9] for the effective diagnosis of bearing faults. Based on spectrum analysis and the convolutional neural network, a fault diagnosis method was proposed in [
10] to identify the bearing faults, which is especially suitable for bearings under inconsistent working conditions. Inspired by the excellent capability of sparse representation theory for fault feature extraction and classification, a collaborative sparsity-assisted fault diagnosis method was proposed and verified by enormous test results in [
11]. A method for incipient bearing fault feature extraction was proposed in [
12] based on optimized singular spectrum decomposition with 1.5-dimensional symmetric differential energy operator demodulation. To detect incipient bearing faults, the vibration signal was preconditioned to highlight minute fault components. After that, an accurate and low-complexity Rayleigh-quotient-based spectral estimator was used to identify fault component frequencies and amplitudes [
13]. Based on the clustering and sparse representation of acquired noisy signals, an effective fault diagnosis algorithm for rolling bearings was proposed in [
14]. Similarly, adaptive K-sparsity-based weighted Lasso was used to promote vibration signal sparsity for better extraction of bearing fault features in [
15]. Based on the envelope harmonic-to-noise ratio and adaptive variational mode decomposition, a new feature extraction technique was presented for bearing fault diagnosis in [
16].
At present, these methods are generally considered to be sensitive and reliable in engineering. However, our understanding of the performance of these vibration-signal-based bearing fault diagnosis methods lacks test support.
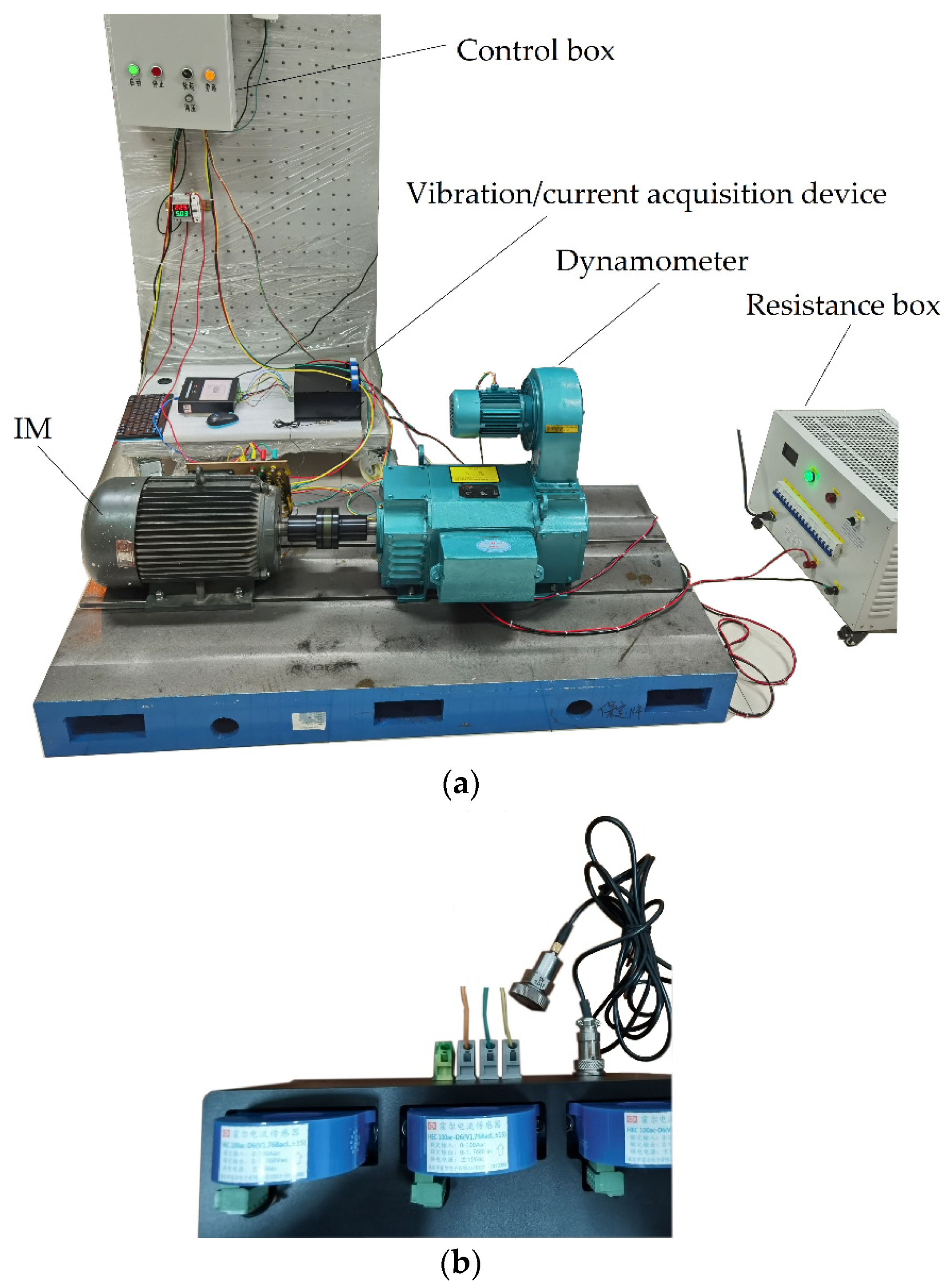
In this paper, we review the vibration-signal-based bearing fault diagnosis methods, and two time-domain indexes, kurtosis coefficient of vibration acceleration and RMS value of vibration velocity, were selected to represent these methods, along with vibration acceleration resonance demodulation spectrum analysis for performance evaluation. Three IMs of types Y100L-2, Y100L-4, and Y132M-4 were tested with modeled bearing outer race and cage faults of different severities. The vibration signals of the 6206-type bearing in Y100L-2 and Y100L-4 IMs and the 6308-type bearing in Y132M-4 IM were recorded and used for bearing fault diagnosis with the aforementioned methods. The diagnosis performance was thoroughly analyzed based on the test results. Furthermore, some vague information in engineering is corrected and further clarified in this paper and a series of rules and suggestions with guiding and practical significance are summarized at the end.
4. Results Analysis
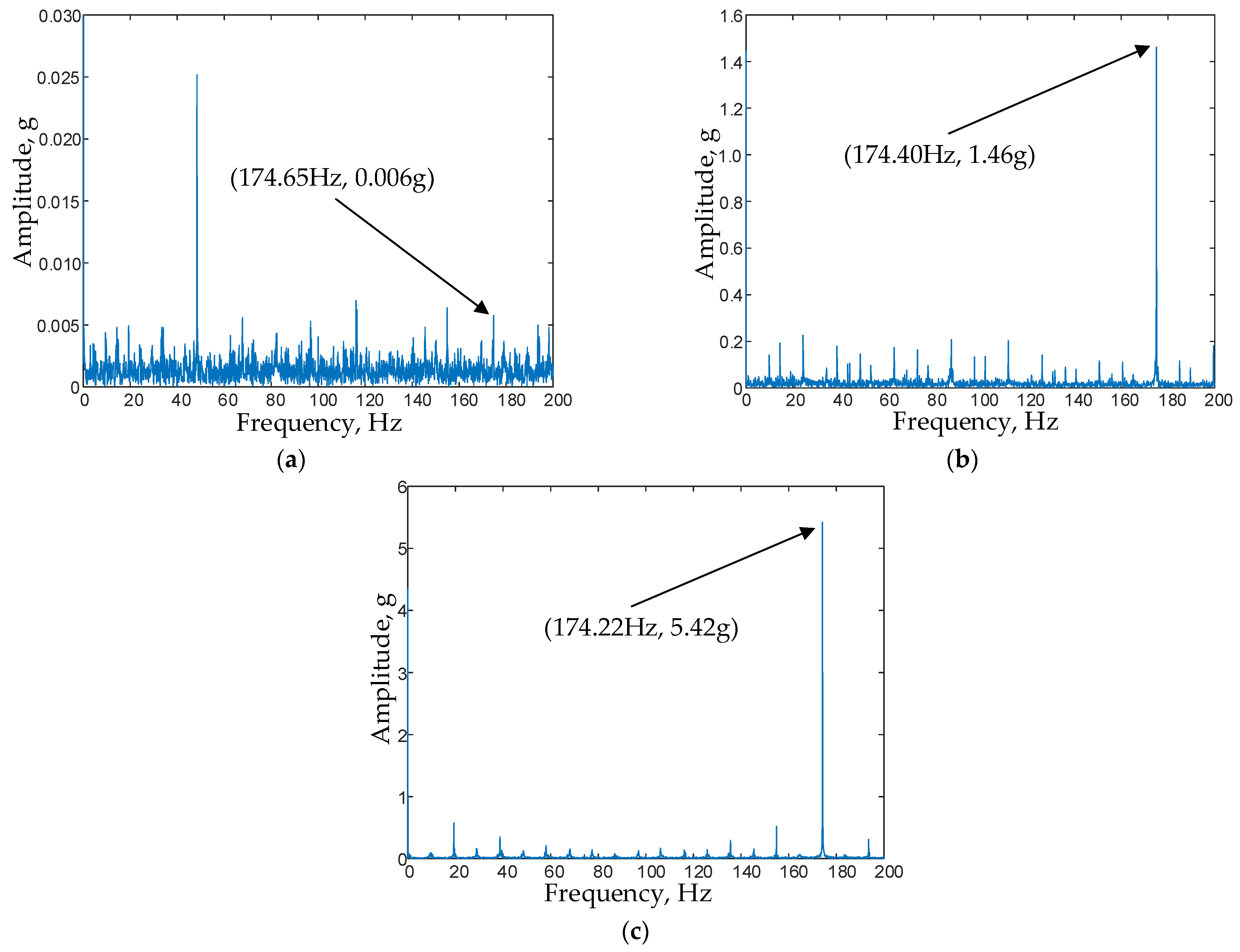
For the Y100L-2 IM, by comparing the graphs in
Figure 4, it can be seen that the frequency domain amplitudes of the outer race fault characteristic components of vibration acceleration show a significant increasing trend, corresponding to the conditions of healthy, slight fault, and severe fault, detailed in
Table 4 and
Table 5. It can be concluded that the bearing fault diagnosis method based on vibration signal analysis is effective in terms of trends. In addition, the kurtosis coefficients of vibration acceleration and the RMS values of vibration velocity in
Table 4 and
Table 5 also demonstrate a significant increasing trend, corresponding to the same three conditions. Moreover, the concrete values are consistent with the evaluation criterion for the bearing states of acceptable and unacceptable in ISO 2372 (4.50 mm/s; see
Table 1).
For the Y100L2-4 IM, the frequency domain amplitudes of the outer race fault characteristic components of vibration acceleration also show a significant increasing trend corresponding to the conditions of healthy, slight fault, and severe fault, as listed in
Table 6 and
Table 7. Hence it can be concluded that the bearing fault diagnosis method based on vibration signal analysis is effective in terms of trends. However, for specific values, the results turn out to be quite different than those of the Y100L-2 IM (refer to
Table 4 and
Table 5). For example, the amplitudes of the fault characteristic components are 0.002, 0.55, and 1.34 g, corresponding to healthy, slight fault, and severe fault conditions, respectively, when the IM has a full load. In contrast, the corresponding test results of the Y100L-2 IM are 0.006, 1.46, and 5.42 g, respectively.
The kurtosis coefficients of vibration acceleration corresponding to the three conditions are also given in
Table 6 and
Table 7. They present a trend of first dramatically increasing and then decreasing. More specifically, when the IM has a full load, the values surged from 3.1 to 57.3 and then decreased to 19.5; with a half-load, the values surged from 3.0 to 66.2 and then decreased to 18.9. This phenomenon is quite different from that of the Y100L-2 IM (refer to
Table 4 and
Table 5).
In
Table 6 and
Table 7, the RMS values of vibration velocity corresponding to the three conditions show a significant increasing trend. However, for the slight fault condition, the specific RMS values of vibration velocity when the IM has a full load and a half load are 2.93 and 2.71 mm/s, respectively. This is not consistent with the evaluation criterion for the bearing states of acceptable and unacceptable in ISO 2372 (4.50 mm/s; see
Table 1). In other words, according to this criterion, the bearing state should be diagnosed as acceptable. Obviously, this diagnosis result deviates from the actual state of the bearing as being in slight fault conditions. Thus, a false diagnosis occurred, showing a faulty bearing as being healthy. This is different from the test results of the Y100L-2 IM (refer to
Table 4 and
Table 5). In addition, the specific RMS values of the vibration velocity of these two IMs are quite different. For example, the values are 1.95, 2.93, and 9.94 mm/s under healthy, slight fault, and severe fault conditions, respectively, when the Y100L2-4 IM has a full load. In contrast, the corresponding test results of the Y100L-2 IM are 4.08, 7.83, and 10.41 mm/s, respectively.
Therefore, with a different pole pair number and the same bearing type, rated power, center height, installation platform, driving mechanism, load, and other factors, the test results of the Y100L-2 IM and Y100L2-4 IM are still different. This implies that the pole pair number of the IM affects the performance of the bearing fault diagnosis method based on vibration signal analysis.
For the Y132M-4 IM, the kurtosis coefficients of vibration acceleration in
Table 8 show an increasing trend, corresponding to the conditions of healthy and outer race fault. This result is the same as that of the Y100L-2 IM (refer to
Table 4 and
Table 5), but different from that of the Y100L2-4 IM, which first greatly increased and then decreased (refer to
Table 6 and
Table 7). More importantly, the kurtosis coefficient of the bearing vibration acceleration of this IM is relatively small; for example, in the case of a fault, the kurtosis coefficient is only 3.0. In engineering, the diagnostic threshold of a bearing fault is generally set as
Ku = 4. Thus, a false diagnosis occurred, showing a faulty bearing as being healthy.
In
Table 8, the RMS values of vibration velocity corresponding to the conditions healthy and outer race fault show a significant increasing trend. However, for the healthy condition, the specific RMS value of vibration velocity is 4.62 mm/s. This is not consistent with the evaluation criterion for the bearing states of acceptable and unacceptable in ISO 2372 (4.50 mm/s; see
Table 1). In other words, according to the criterion, the bearing state will be diagnosed as unacceptable. Obviously, this diagnosis result deviates from the actual state of the bearing as being healthy. Thus, a false diagnosis, showing a healthy bearing as being faulty, is unavoidable. This is different from the test results of the Y100L-2 and Y100L2-4 IMs (refer to
Table 4 and
Table 5 and
Table 6 and
Table 7). In addition, the specific RMS values of vibration velocity of these three IMs are quite different. For example, for the fully loaded Y132M-4 IM, the RMS value of vibration velocity is 4.62 mm/s in the healthy condition. In contrast, the corresponding test results of the Y100L-2 and Y100L2-4 IMs are 4.08 and 1.95 mm/s, respectively.
In
Table 8, the amplitudes of the vibration characteristic components corresponding to healthy and faulty conditions show an increasing trend. However, in terms of specific values, they are different from those of the Y100L-2 and Y100L2-4 IMs (refer to
Table 4 and
Table 5 and
Table 6 and
Table 7).
It is important to note that the Y132M-4 IM has a significantly greater mass than the Y100L-2 and Y100L2-4 IMs as well as a different bearing type (6308 versus 6206). Therefore, it can be concluded that both the mass and bearing type of the IM affect the performance of the bearing fault diagnosis method based on vibration signal analysis.
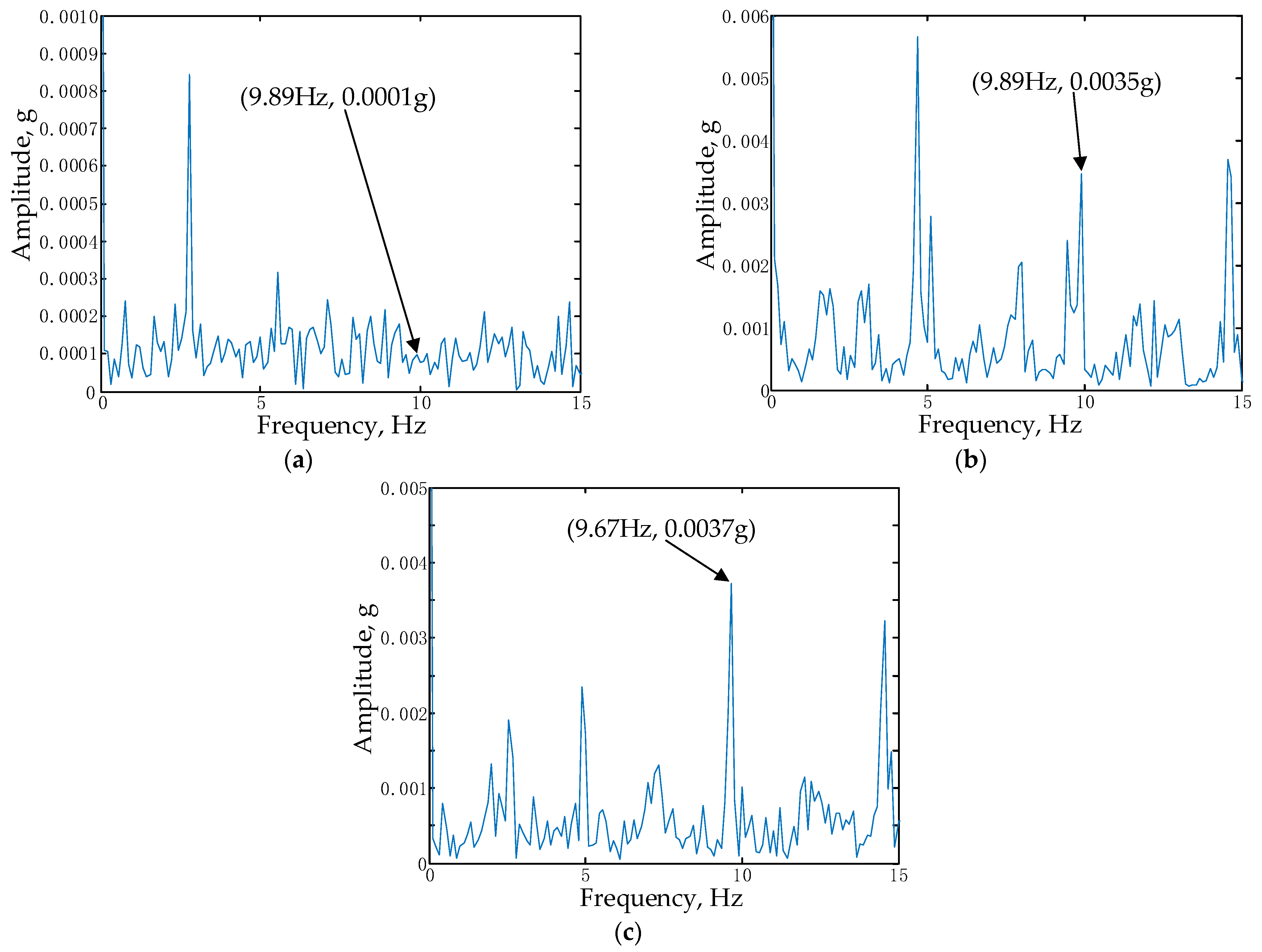
As for the cage fault diagnosis of the Y100L2-4 IM, by comparing the graphs in
Figure 5, it can be seen that when the IM is fully loaded, the frequency domain amplitudes of the cage fault characteristic components show an increasing trend, corresponding to the conditions of healthy, slight fault, and severe fault, as detailed in
Table 9. In addition, in terms of specific values, the frequency domain amplitudes of the cage fault characteristic components are far less than those of the outer race fault characteristic components (refer to
Table 4,
Table 6 and
Table 8). For example, when the IM is fully loaded, the amplitudes are 0.0001, 0.0035, and 0.0037 g corresponding to the conditions of healthy, slight fault, and severe fault, respectively. In contrast, the corresponding results of the outer race fault diagnosis are 0.002, 0.55, and 1.34 g, respectively.
In
Table 9, the kurtosis coefficients of vibration acceleration are all around 3.0, corresponding to the three conditions. This is quite different from the test result of the outer race fault diagnosis, which showed values that first dramatically increased and then decreased (refer to
Table 6 and
Table 7). In engineering, the diagnostic threshold of a bearing fault is generally set as
Ku = 4. This may lead to a false diagnosis, showing a faulty bearing as being healthy. This means that the kurtosis coefficient of vibration acceleration is not sensitive and may even be ineffective for cage faults to some extent.
In
Table 9, the RMS values of vibration velocity show an increasing trend corresponding to the three conditions. However, even under the severe fault condition, for the fully loaded IM, the specific RMS value of vibration velocity is only 2.45 mm/s. This is not consistent with the evaluation criterion for the bearing state in ISO 2372 (4.50 mm/s; see
Table 1). In other words, according to the criterion, the bearing state will be diagnosed as acceptable. Obviously, this result deviates from the actual state of the bearing, that is, a severe cage fault. Thus, a false diagnosis would occur, showing a faulty bearing as being healthy. In addition, the specific RMS values of vibration velocity are quite different from the test results of the outer race fault diagnosis (refer to
Table 6). For example, for the fully loaded IM, corresponding to the conditions of slight cage fault and severe cage fault, the RMS values of vibration velocity are 2.07 and 2.45 mm/s, respectively. In comparison, the test results of the outer race fault diagnosis are 2.93 and 9.94 mm/s, respectively. This implies that the contribution of a cage fault to the bearing vibration may be significantly smaller than that of an outer race fault.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}