1. Introduction
As a result of economic development and the still growing online trade, the transport performance of trucks continues to increase. This is also shown in CO
2 emissions. In the EU, a total of 748 million tons of CO
2 were emitted in road traffic. Compared with 1990, this represents an increase of 21%. Heavy-duty vehicles (HDVs) and buses accounted for 27% of this figure, while accounting for only 2% of the vehicles on the road. Road freight transport grew from 74% to 77% from 2011 to 2021, while rail’s share of heavy freight transport across the EU was only 17% in 2021 and even decreased by 2% in the same period [
1]. In 2022, diesel trucks still account for 96.6% of the total new vehicle registrations in the EU. In comparison, electric truck sales increased by 32.8%, but this only represents a market share of 6% [
2]. Since August 2019, the regulation on CO
2 emission standards on heavy-duty vehicles has been in force. In the first step, mainly large semitrailer trucks are affected, which account for 73% of CO
2 emissions from all heavy-duty vehicles. The goal is to reduce CO
2 emissions by 30% from 2030 onwards in comparison with the reference period from July 2019 to June 2020 and to reach climate neutrality by 2050 [
3]. Therefore, trucks and buses need to be entirely decarbonized. To reach this goal, it is needed to change powertrains to run on renewable energy sources; for example, battery electric, fuel cell, or hydrogen combustion powertrains. Although e-fuels are considered sparse and expensive, they have a far lower efficiency as well as a 50% higher TCO compared with pure battery electric powertrains [
4] (3f). Owing to the targets set by multiple countries and states, manufacturers are forced to quickly offer new vehicle models with locally CO
2-neutral drive trains. Sales should be increased even more by −45% CO
2 in 2030 and −90% in 2040 [
4] (p. 1). Ten EU countries have already set their goal to 100% zero-emission HDV sales by 2040 [
4] (p. 3).
The fuel consumption and CO
2 emissions of conventional heavy-duty vehicles have already been researched in depth. In [
5], the fuel consumption of current heavy-duty vehicles is investigated based on real-world data. The CO
2 emissions of the heavy-duty vehicle fleet in Europe was analyzed in [
6]. The EU already provides the tool VECTO to calculate the CO
2 emissions for different vehicles and applications. In the current release (version 3.3.15.3102), only internal combustion engine vehicles (ICEVs) are considered [
7].
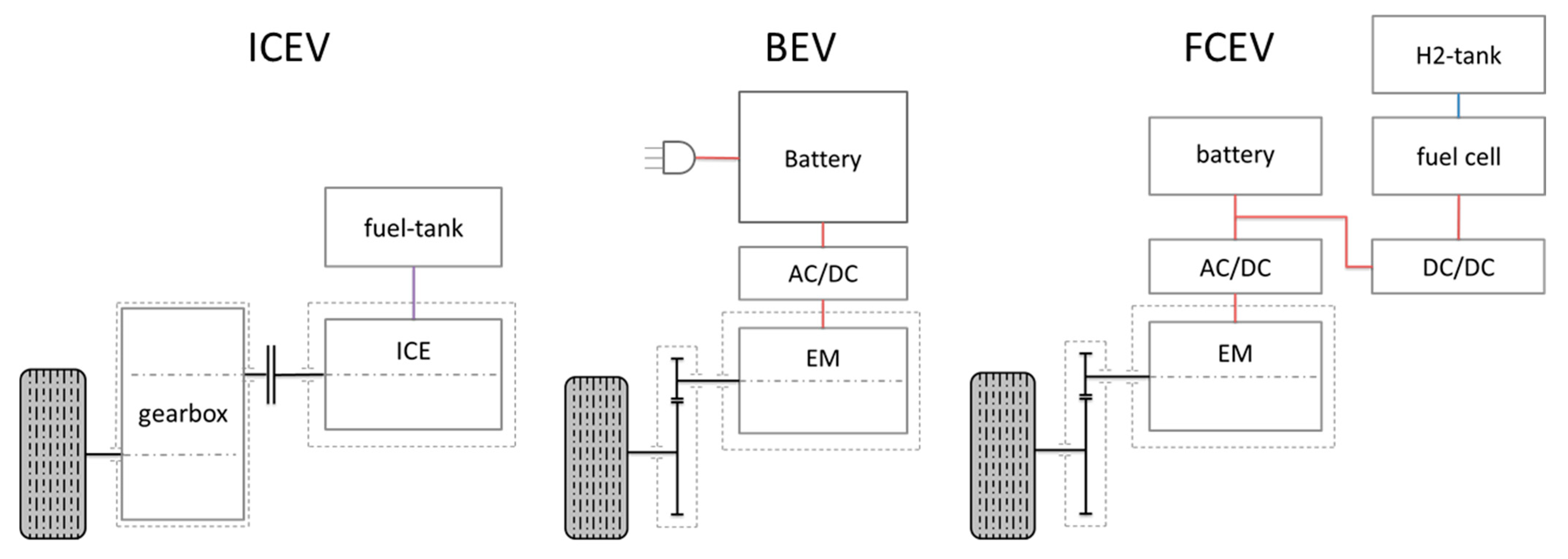
With regard to alternative powertrains in [
8], the performance parameters; working principles; and recent developments of ICEVs, battery-only vehicles (BEVs), and (fuel cell vehicles) FCEVs were compared. The current advantages and disadvantages were also summarized. It was concluded that there will be no single strategy for the different heavy-duty applications and that it is important to understand more about the different powertrain options. The authors of [
9] noted that, unlike road passenger transport, road freight transport still lacks marketable products. For Germany in particular, it is still unclear which boundary conditions (e.g., subsidies and regulations) will be set for the various powertrain options.
In order to better classify these various drive options, evaluations were carried out in various studies with regard to economy, efficiency, and emissions. In [
10], a total-cost-of-ownership (TCO) analysis for the time range till 2030 was made for heavy-duty BEVs and compared with the conventional ICE. For this purpose, a model was created that defines various transport relations for which the costs were determined individually. Energy consumption is calculated on the basis of constant consumption values per powertrain option multiplied by the mileage for a relation. The extra weight for batteries as well as the auxiliary power consumers are not considered. This model was enhanced in [
9], where heavy-duty FCEVs and BEVs with catenary have also been evaluated. In addition, the model was extended to include the calculation of CO
2 emissions for operation and production. A similar approach to making TCO estimation was followed in [
4] but without distinguishing between different transport relations.
A deeper investigation with a detailed model of the powertrain was carried out in [
11]. In this paper, only heavy-duty BEVs were considered. The focus is on the range of BEVs with different variants of batteries and motors. This model was extended to heavy FCEVs in [
12]. In this study, BEVs, FCEVs, and ICEVs were also compared. This comparison was based on energy consumption from tank-to-wheel, i.e., the energy that has to be put into the vehicle. This method neglects the efficiency losses that occur before the tank, e.g., in the production of the fuel (diesel, hydrogen) or electricity.
When comparing different energy sources such as electricity and different fuels, it is not sufficient to compare energy consumption based on the tank-to-wheel efficiency. It is necessary to consider all efficiencies in the whole energy chain. An approach to implementing primary energy efficiencies in the energy calculation for different powertrain options was introduced in [
13]. In this paper, constant overall efficiencies were used for the different powertrain options, which are not dependent on the different applications. As the paper dates back to 2001, the data are also no longer up to date. The authors of [
4] had a similar approach to calculating the primary energy consumption of BEVs, FCEVs, and ICEVs with fuel from power-to-liquid and power-to-methane production. This was also not carried out for a certain application. Instead, it was assumed that the entire transport volume in Germany for heavy vehicles weighing more than 26 tons would be handled with one of the above-mentioned powertrain options. It was also assumed that only renewable electricity is used as a base for the production of fuels (in the case of hydrogen, electrolysis is assumed).
When it comes to economics, some TCO analyses have already been introduced above. In [
14], the expected fuel price for hydrogen in the next decade and the price required to break even in different EU countries were investigated and compared to BEVs and ICEVs.
The effect of autonomous vehicles on the energy consumption of the transport sector has already been investigated in several studies [
15,
16,
17]. These studies investigate how energy consumption changes as a result of changing travel demand as well as an optimized route planning of connected vehicles. They do not evaluate how the energy consumption of an autonomous vehicle changes compared with a conventional vehicle when driving the same scenario.
This research also serves as preliminary work for a long-haul robot truck (LHRT) concept development within the framework of the DLR project “VMo4Orte” [
18]. For this purpose, it is to be investigated which powertrain concept is best suited for the most used operating variants in current road transport in the EU. The focus is especially on hub-to-hub logistic traffic. The LHRT concept will be evaluated later on based on a corresponding real-world transport scenario. In addition to full automation, suitable powertrains are also being investigated and compared in the LHRT concept. Another autonomous vehicle concept with a mover with a changeable capsule for different transport applications has already been evaluated in previous work [
19]. Therefore, BEV, FCEV, and ICEV powertrains are being simulated in the Dymola modeling environment in a standard cycle and a daily driving cycle so that the results can then be compared and evaluated in terms of primary energy consumption, CO
2 emissions, and energy benefits for autonomous driving. This modeling environment is currently developed and applied in the DLR projects “FFAE” and “V&V4NGC” [
20].
The contribution of this paper is the development of a method to determine the CO2 emissions, primary energy consumption, and fuel costs for different powertrain options that can be applied on different applications and scenarios. This method includes detailed and dynamic models of different powertrains, including a model for the auxiliaries including the cabin climatization. Using these models, different applications and scenarios based on the velocity and gradient profiles can be evaluated in detail and compared against each other to evaluate which powertrain option fits best to a certain application. The evaluation considers the primary energy consumption instead of the tank-to-wheel evaluation to compare different energy sources. CO2 emissions have been investigated using current and estimated CO2 emissions. The economic evaluation was performed regarding fuel costs. The cab model was used to investigate whether omitting the cabin and other driver-related auxiliaries leads to lower energy consumption in autonomous vehicles.
The paper is structured as follows. In
Section 2.1, a vehicle use case is defined, defining the type and the size of the vehicles. In
Section 2.2, two typical scenarios for this vehicle use case are developed. The parametrization of the vehicles is determined in
Section 2.3. The powertrain design is needed as an input to the simulation, so a powertrain design is created in
Section 2.4. The simulations that are performed are described in
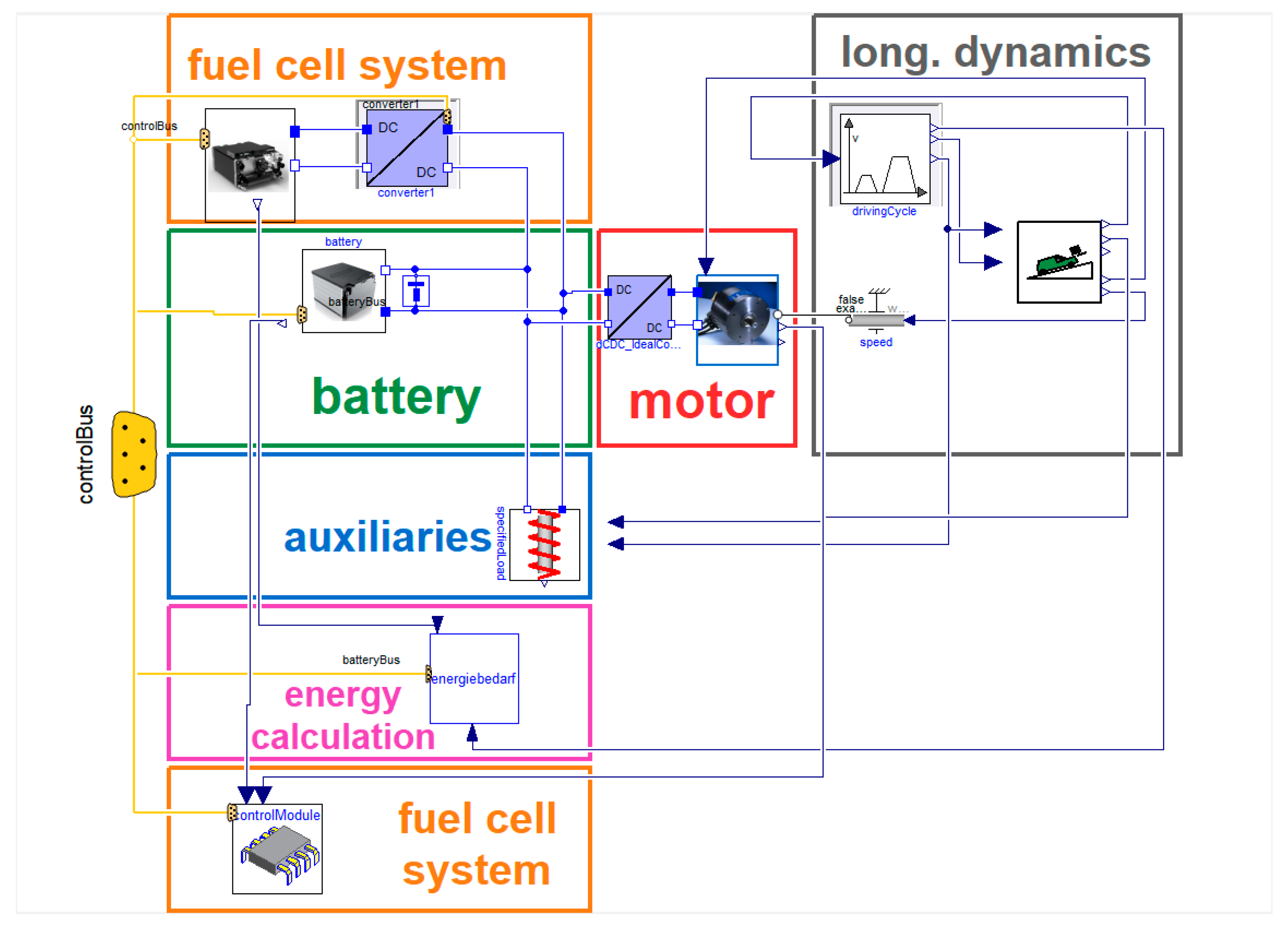
Section 2.5. The simulation model is then introduced in
Section 2.6. A postprocessed method to calculate the primary energy consumption, CO
2 emission, and fuel costs is presented in
Section 2.7. In
Section 3, the results are presented, divided up into the two scenarios, as well as autonomous driving. Finally, the discussion is provided in
Section 4.
3. Results
In this section, the simulation results are evaluated regarding the primary energy consumption, CO2 emissions, and fuel costs. The results from the FIGE cycle are used to analyze the differences in different road types (urban, rural, and motorway) and to evaluate the energy consumption for different application scenarios. With the results from the daycycle, the CO2 emissions and fuel costs are determined for a realistic scenario.
3.1. FIGE Cycle
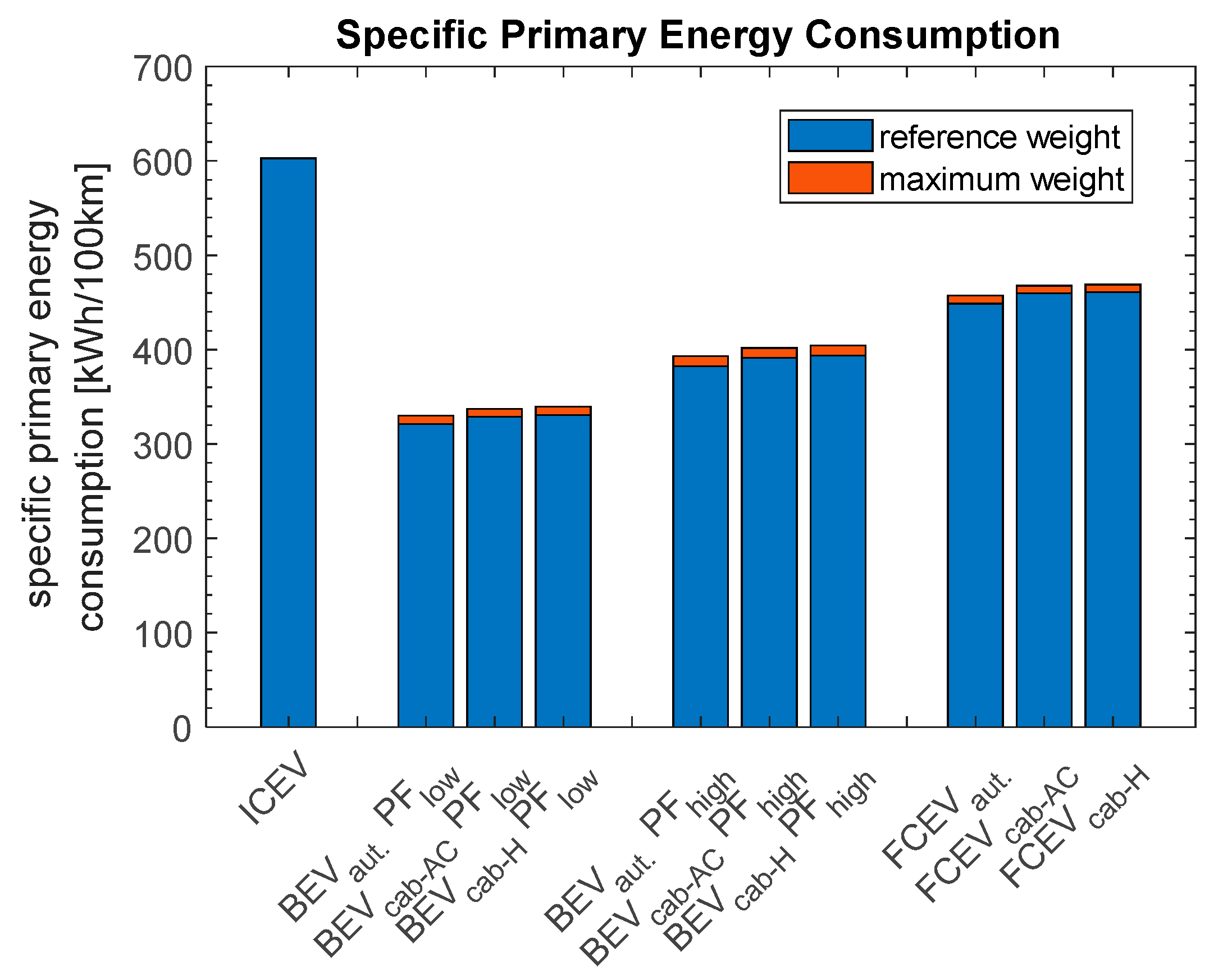
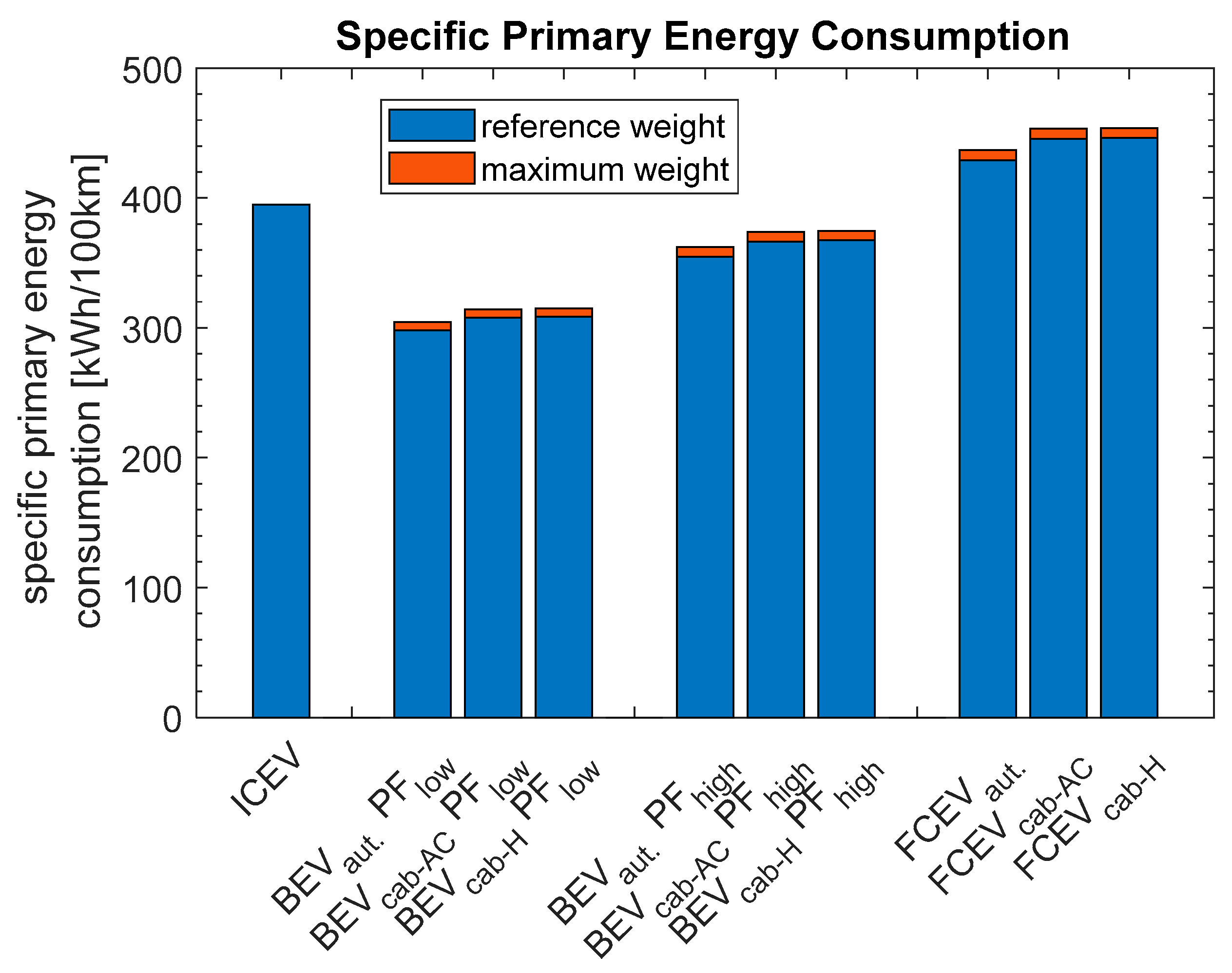
In
Figure 5, the specific primary energy consumption for the different powertrain topologies (ICEV, BEV, and FCEV) is shown. It is distinguished between the reference weight (40 tons for all vehicles) and the maximum weight, which is 2 tons higher for the electrified vehicles. For the BEV, it is also distinguished between the high and low primary energy factors for electricity.
It becomes clear that the ICEV has the highest specific primary energy consumption, followed by the FCEV and then the BEV. The variation in the primary energy factor for the BEV leads to high sensitivity. While the primary energy factor for diesel will remain the same in the future, the factors for electricity and hydrogen will decrease in the coming years because of the upcoming use of renewable energy sources to generate electricity and the combination of renewable energy electricity and electrolysis to generate hydrogen. Consequently, it is expected that, for electrified powertrains, the primary energy consumption will also decrease the coming years. Autonomous vehicles can reduce energy consumption by up to 10 kWh/100 km compared with vehicles with a cabin.
The most important benefit factor for the user is the achievable payload, which differs for the different powertrain variants. To take this into account, the specific primary energy consumption is divided by the payload to obtain the energy value needed per ton of payload. The results are shown in
Figure 6. For this consideration, the maximum weight yields lower energy consumption quotients because the resulting payload is higher.
As before, the ICEV has the highest energy consumption, followed by the FCEV and BEV. However, it is clear that the gap between the BEV and FCEV is becoming smaller. For the BEVs with a higher PF, the energy consumption is almost the same because of the benefit of a higher payload for the FCEVs.
A closer look at the results shows that the characteristics of the different parts of the FIGE cycle (urban, rural, and motorway) are very different. In
Figure 7, the charged and discharged energy shares for the battery in the FIGE cycle (one-third of the cycle each) for the BEV are visualized. In case of the BEV, charged energy means recuperated energy from electrical braking, whereas discharged energy means energy for traction and auxiliaries.
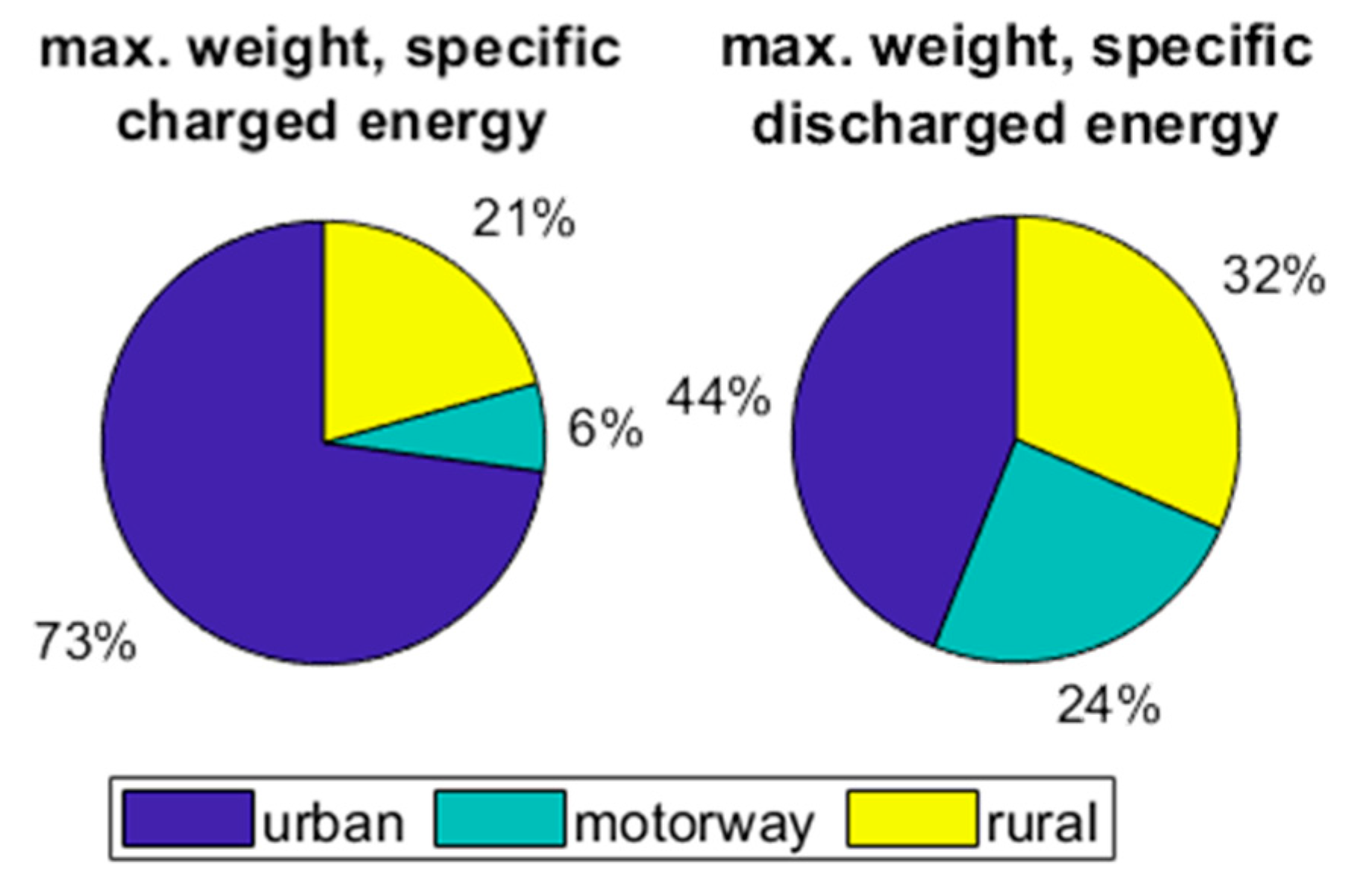
It becomes clear that more energy can be recuperated in the urban and rural part than on motorways. This is because of the higher incidence of acceleration and deceleration operations. On the other hand, the motorway and rural part are responsible for 79% of the energy demand owing to the higher velocity. It should be mentioned that, in total, the charged energy is around 22% of the charged energy for the whole FIGE cycle, so 22% of the energy needed could be recuperated by an electrified powertrain. If the energy consumption is referred to as 100 km as a basis, the shares shift as seen in
Figure 8.
Still, the charged energy share for the urban part is the greatest. Looking at the discharged energy, it can be seen that the urban part has the highest share. This is because of the high incidence of accelerations and the lower mileage, so more energy is needed to overcome the same distance in urban areas than in rural areas or on the motorway. Moreover, the power of the auxiliaries is dependent on the time and not on the mileage. If the vehicle is in standstill or a low velocity in urban areas, the auxiliaries need the same power as on the motorway with a high velocity, so, per 100 km, the specific energy consumption for the auxiliaries is higher in the urban part.
The specific primary energy consumptions in the different parts of the FIGE cycle are additionally compared for each powertrain architecture in
Figure 9. For the BEV and FCEV, the cabin vehicle with the cooling scenario is used.
The greatest difference between the three parts is given for the ICEVs. In the urban part, the primary energy consumption is more than twice as much as in the rural part and more than four times higher than in the urban part. The main reasons are that the ICEV is not able to recuperate energy with electrical braking and, as shown in
Figure 7 and
Figure 8, especially in the urban part, the vehicle could recuperate energy. The overall efficiency of the ICEV is also low in urban areas, ranging from 5% (empty vehicle) to 16% (full vehicle) in the simulations. It is noticeable that, for the urban part, the ICEV has the same specific energy consumption as the BEV with a low PF and less specific energy consumption than the BEV with a high PF and the FCEV.
3.2. Daycycle
The results in the daycycle differ from those in the FIGE cycle, as the daycycle mainly consists of motorway parts. Analogous to
Figure 5, the specific primary energy consumption for the different powertrain topologies is shown in
Figure 10. It is also distinguished between the reference weight and the maximum weight. The primary energy consumption for the FCEVs is the highest, followed by the ICEV and then the BEV. Compared with the results in the FIGE cycle, the high percentage of highway passages in the daily cycle gives the ICEV the opportunity to not have the highest energy consumption. However, regarding the results of the BEV with both PFs, it becomes obvious that the results are sensitive to the way in which the electricity/hydrogen is generated/produced. As the PF of diesel will not change in the future, the PF of electricity and hydrogen does change. It can also be concluded that the primary energy consumption of electrified powertrains will decrease with succeeding expansion of renewable energy sources. Autonomous vehicles have a lower specific primary energy consumption of 11 kWh/100 km for the BEV and 17 kWh/100 km for the FCEV.
Considering the payload, the results change. Analogous to
Figure 6, in
Figure 11, the specific primary energy consumption per ton of payload for the daycycle is shown. Again, the maximum weight yields lower values for the electrified powertrains compared with the reference weight.
As the payload for the FCEV is the highest and the payload for the BEV is the lowest for the three vehicles, the specific primary energy consumption for the FCEV, the BEV with a high PF, and the ICEV is now in the same range. With a low PF, the BEV has still the lowest values.
The CO
2 emissions are regarded in the above-mentioned two scenarios. The results for the first scenario for the daycycle are shown in
Figure 12.
The CO
2 emissions for the ICEV are the highest. With the current hydrogen made by steam reforming, the FCEV has 2.5 times higher CO
2 emissions than the BEV. It should be noted that the CO
2 emission factor for electricity is decreasing every year at the moment, and differs significantly among different countries of the EU. For the second scenario, the CO
2 emissions for the daycycle are shown in
Figure 13.
It is obvious that, in this scenario, the CO2 emissions of the ICEV are about 31 times higher than those of the BEV and 16 times higher than those of the FCEV in the daily cycle.
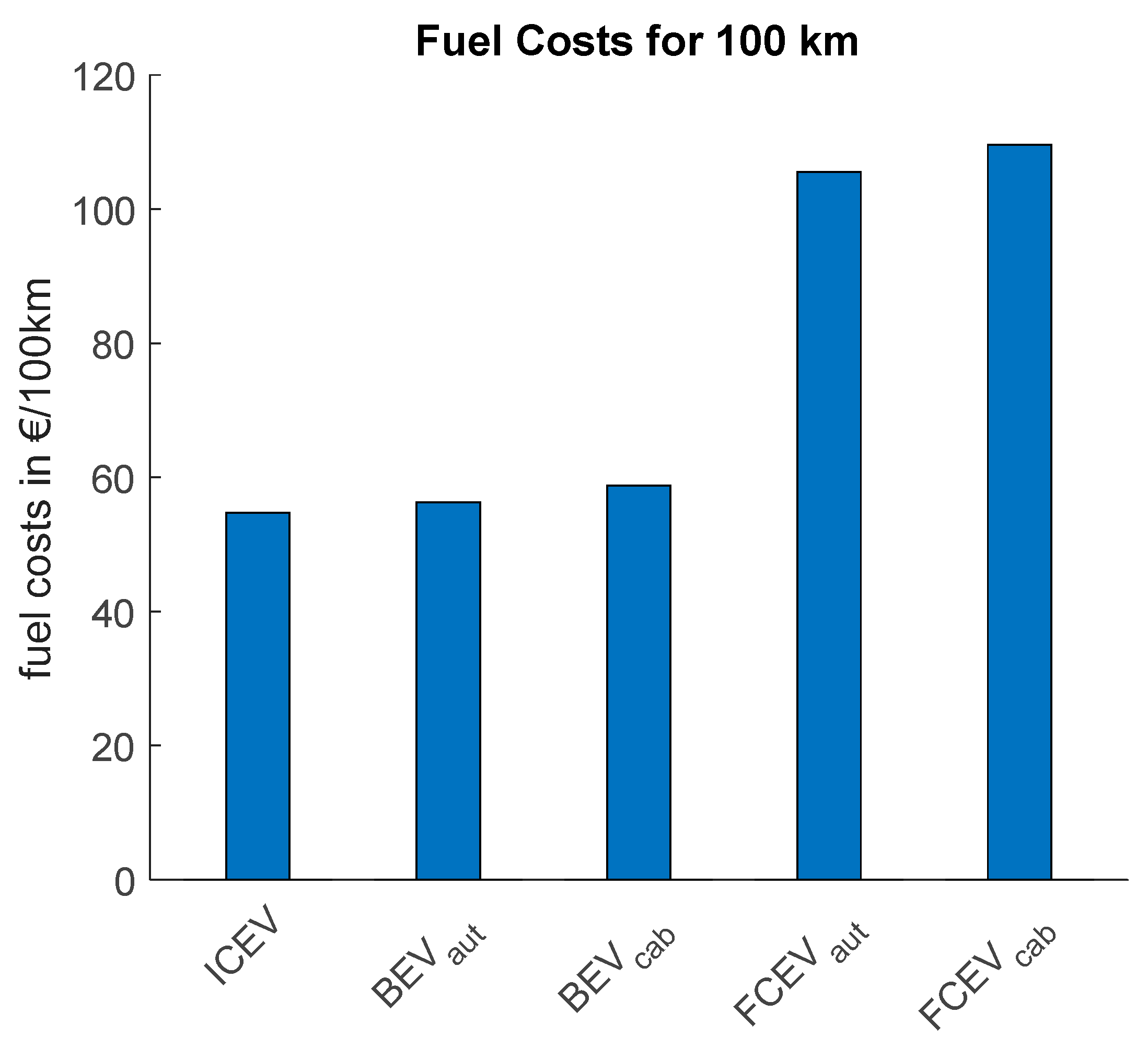
In
Figure 14, the fuel costs for a 100 km distance based on the daycycle are visualized for the different powertrain topologies.
The ICEV has the lowest fuel costs, followed directly by the BEV. It should be noted that the basis for electricity is the standard electricity price. Buying electricity at public charging points is more expensive. The FCEV has the highest fuel costs owing to the high hydrogen price at the moment. To achieve competitive conditions for the FCEV in terms of fuel costs, the price of hydrogen must be at least halved. In [
14], the price of green hydrogen at the pump in 2035 for several European countries was estimated to be between 5.5 €/kg (Poland) and 8.1 €/kg (Germany). This price is made up of the production costs of green hydrogen and the costs for the fueling station. This study also assumed an increasing diesel price in the future.
3.3. Autonomous Driving
A key question of this article is whether autonomous driving has an increasing or decreasing effect on energy consumption. In
Figure 5 and
Figure 10, it is already visible that autonomous driving can reduce the energy consumption in the FIGE cycle and the daycycle. In
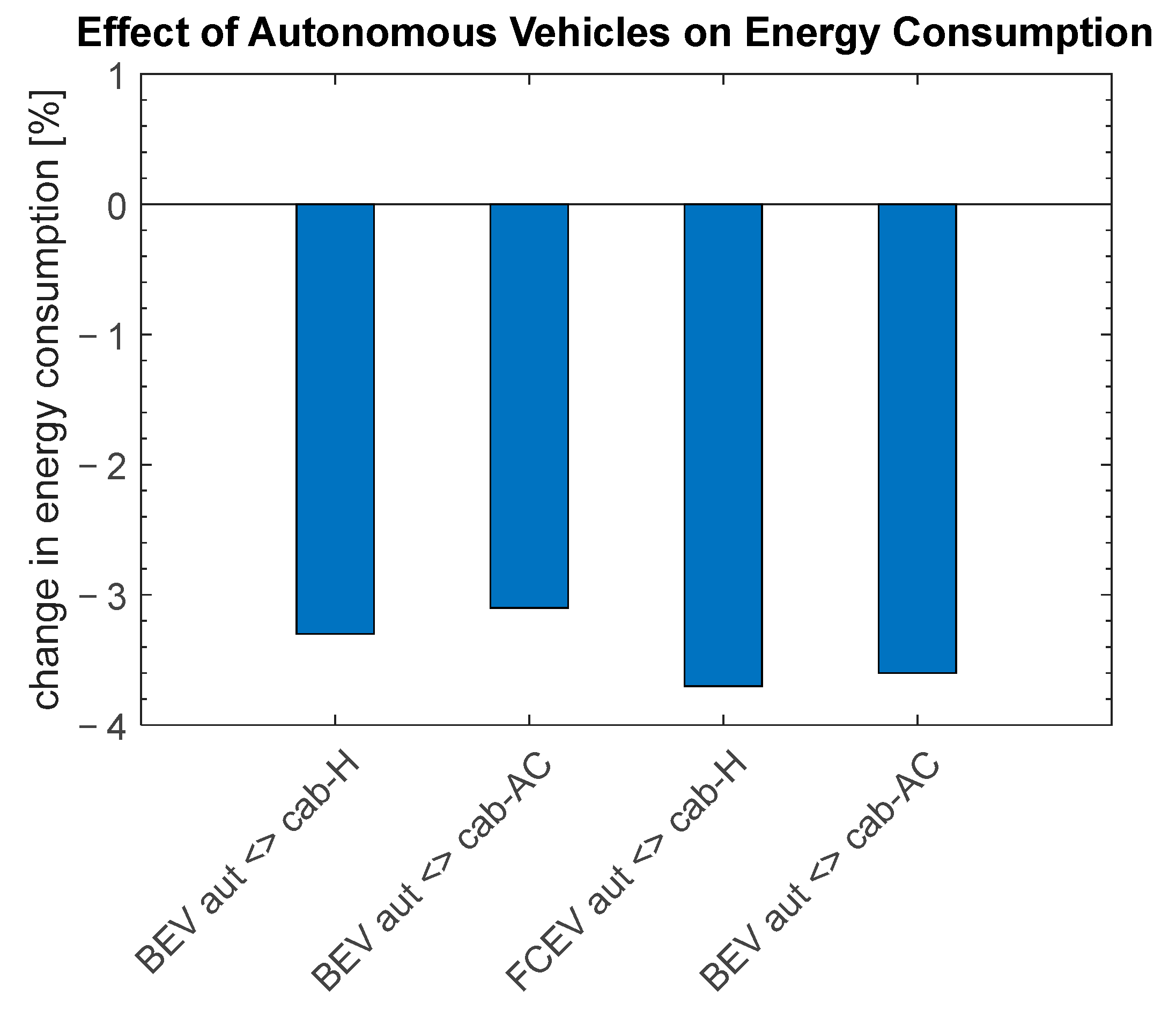
Figure 15, the primary energy consumption in the daycycle of the autonomous vehicle is directly compared with the cabin vehicles in both climatic scenarios on a percentage basis.
It is obvious that the autonomous vehicles can reduce the energy consumption by up to 3.7% in the daycycle. In
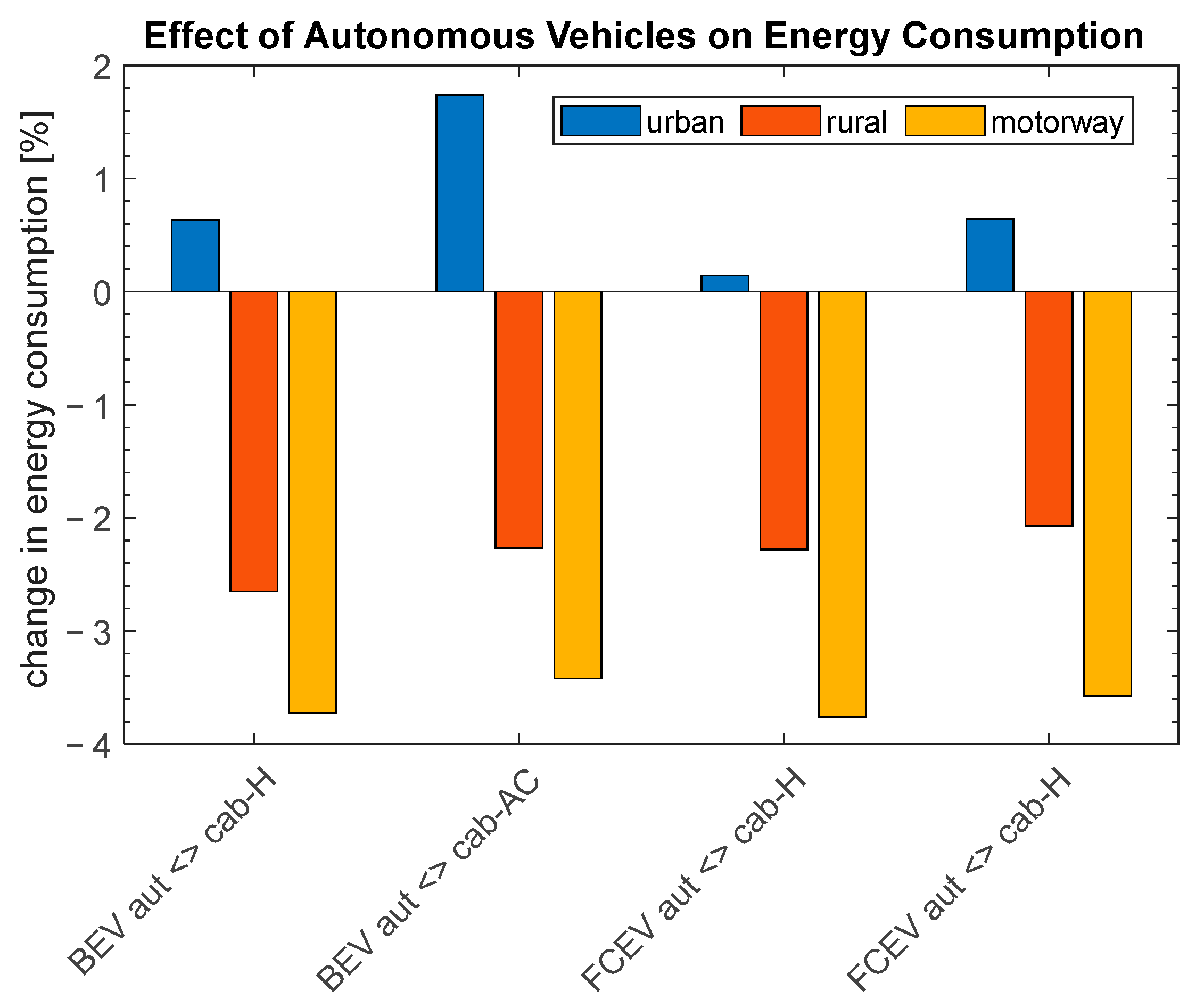
Figure 16, the effect of autonomous driving on the primary energy consumption is shown for the different parts of the FIGE cycle. Here, the autonomous vehicle is directly compared to the cabin vehicles in both climatic scenarios on a percentage basis.
For the rural and motorway parts, the energy consumption for the autonomous vehicle is still lower than for the cabin vehicles. However, for the urban part, the autonomous vehicle needs more energy than the cabin vehicle. This yields the assumption that the energy reduction is mainly caused by the lower air drag coefficient of autonomous vehicles. The air drag coefficient determines the air resistance as a function of the squared longitudinal velocity. Hence, the higher velocities in the rural and motorway part yield higher energy reductions when lowering the air drag coefficient. This assumption was proven by simulations. Therefore, an autonomous FCEV with a reference weight was simulated with an air drag coefficient of 0.6 instead of 0.52 for both the FIGE cycle and the daily cycle. For the FIGE cycle, the primary energy consumption was 316.6 kWh/100 km instead of 307.3 kWh/100 km. This value is 1.9 kWh/100 km higher than for the cooling scenario and 1.0 kWh/100 km higher than for the heating scenario. For the daycycle, the new simulation resulted in 306.8 kWh/100 km, which is 1.6 kWh/100 km and 1.2 kWh/100 km higher than the cooling and heating scenarios, respectively. This shows that the assumption was correct, and the main energy reduction potential for this use case of autonomous vehicles comes from the improvement in the air drag coefficient, based on the above-made assumptions.
4. Discussion
As assumed from [
13], using BEVs and FCEVs can help reduce primary energy consumption from heavy-duty vehicles, whereas BEVs are supposed to have the lowest primary energy consumption. However, this depends heavily on the way in which electricity or hydrogen is generated, which could be seen in this paper by using different primary energy factors. This also depends on how the BEVs or FCEVs are used in certain applications and scenarios. The impacts of different scenarios and road types on the energy consumption and the efficiencies are examined in this paper in detail using detailed models and different scenarios and road types. Another new finding is that FCEVs have the highest payload, but, because hydrogen production is currently non-renewable, primary energy consumption is even higher than for ICEVs in some scenarios, especially in the daycycle or on motorways. BEVs have the disadvantage of a lower payload; this is also included in this method by relating primary energy consumption to payload. Considering this as a result, the specific primary energy consumption of FCEVs and BEVs is already in a similar range in some cases.
The CO
2 emissions of the BEV and FCEV are lower than those of the ICEV, whereas the BEV has the lowest CO
2 emissions. This was also observed in [
9]. However, as more and more electricity is generated from renewable sources, CO
2 emissions as well as primary energy consumption fall in the short term.
If hydrogen is produced by electrolysis with renewable electricity in the future, the primary energy consumption and CO
2 emissions for the FCEV will drop significantly. It turns out that ICEVs have lower efficiency due to the lack of recuperation capability, especially in urban areas. The ICEV instead has the lowest fuel cost, directly followed by the BEVs. Hydrogen is still expensive, as is driving FCEVs. Halving the fuel price for hydrogen could achieve the same fuel cost. In [
14], it was found that the fuel price must be reduced to almost one-third to break-even. However, this study also includes a TCO analysis, which was not conducted in this paper. Even if using FCEVs is still expensive, they can foster sustainable development.
A method could be introduced that consists of modular models. They can easily be adapted to other technologies. The models can also be easily adapted to other scenarios. It is possible to investigate the energy efficiencies of different powertrain options and scenarios in detail. Moreover, a model for the auxiliaries was added.
Using this model, it was possible to evaluate that autonomous driving can reduce the energy consumption and, as a consequence, CO
2 emissions. Despite the original assumption, it turns out that the main reduction potential is the reduction in the air drag due to optimizations of the vehicle front and not omitting the cabin’s auxiliaries. In pure urban scenarios, autonomous driving yields even higher energy consumptions. However, autonomous vehicles also have additional exterior design options to further improve the energy consumption, which has already been evaluated in [
18].
This study does not consider different driving behaviors of autonomous vehicles compared with conventional vehicles. Therefore, for example, for autonomous vehicles, it is not necessary to make a break, but the velocity can be reduced to reach the destination at the same time. For proper operation of autonomous vehicles, great efforts are being made to integrate sensors that collect and process environment information. Reducing the energy consumption of the sensors and related computational modules can improve the energy efficiency of autonomous vehicles. Works to improve the algorithms needed and to reduce computing complexity have already been performed in [
41,
42,
43,
44].
An additional aim of this study is to investigate a base operational scenario for the LHRT, using the FIGE cycle to evaluate the method. Additionally, a new cycle was introduced. This method can be applied to new real-world scenarios in the next step, such as hub-to-hub traffic.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}