
Electric Analysis of the Maritime Application High-Frequency Magnetohydrodynamic Thruster

Abstract
:1. Introduction
2. Frequency Response of Conductive Solution with the Metallic Electrode
2.1. Low Voltage Frequency Response of the Seawater Salinity Chloride Solution
2.2. Equivalent Resistance Model and the Frequency Response of KCl Solution for Maritime MHD Thruster
3. Magnetic Coil Structure and Study of Simulation
4. Electric Drive and Lorentz Force Analysis
4.1. Electric MHD Thruster Drive Circuit
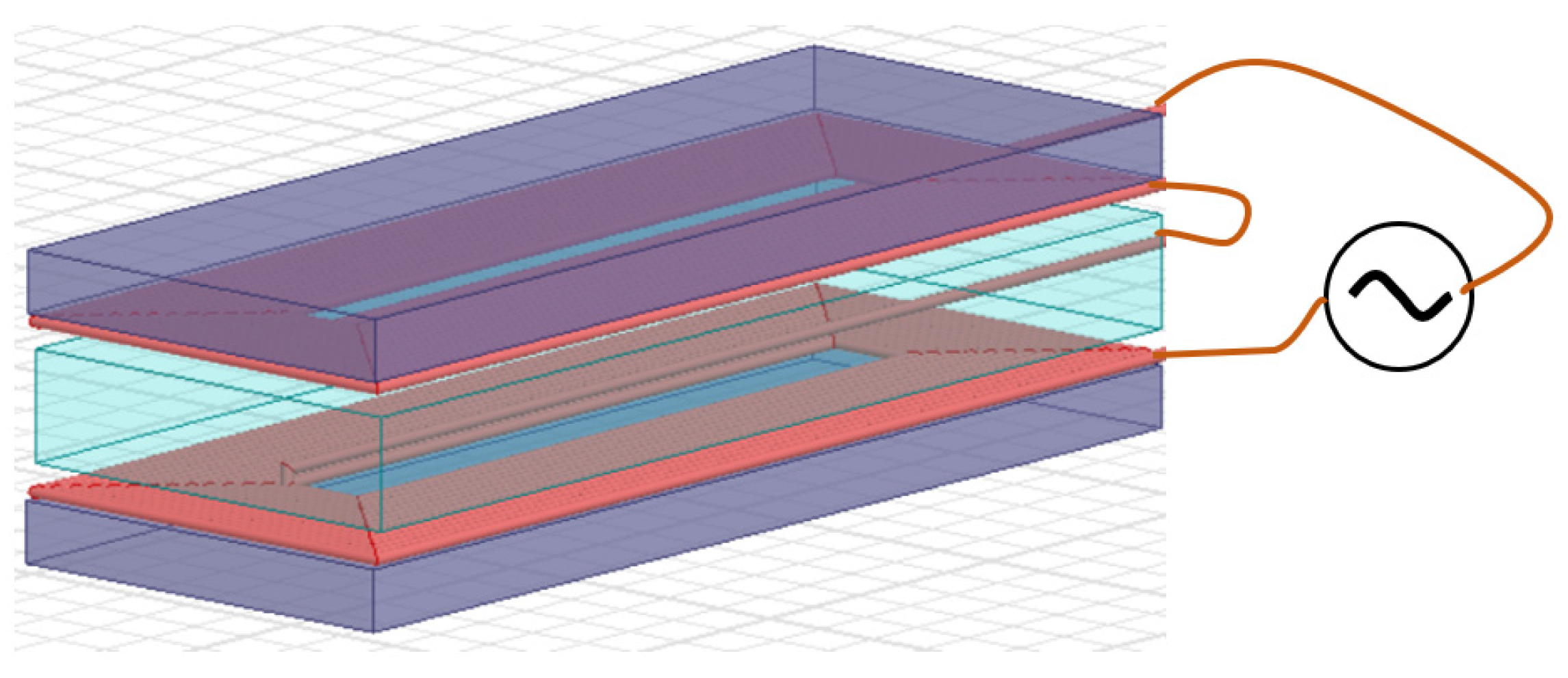
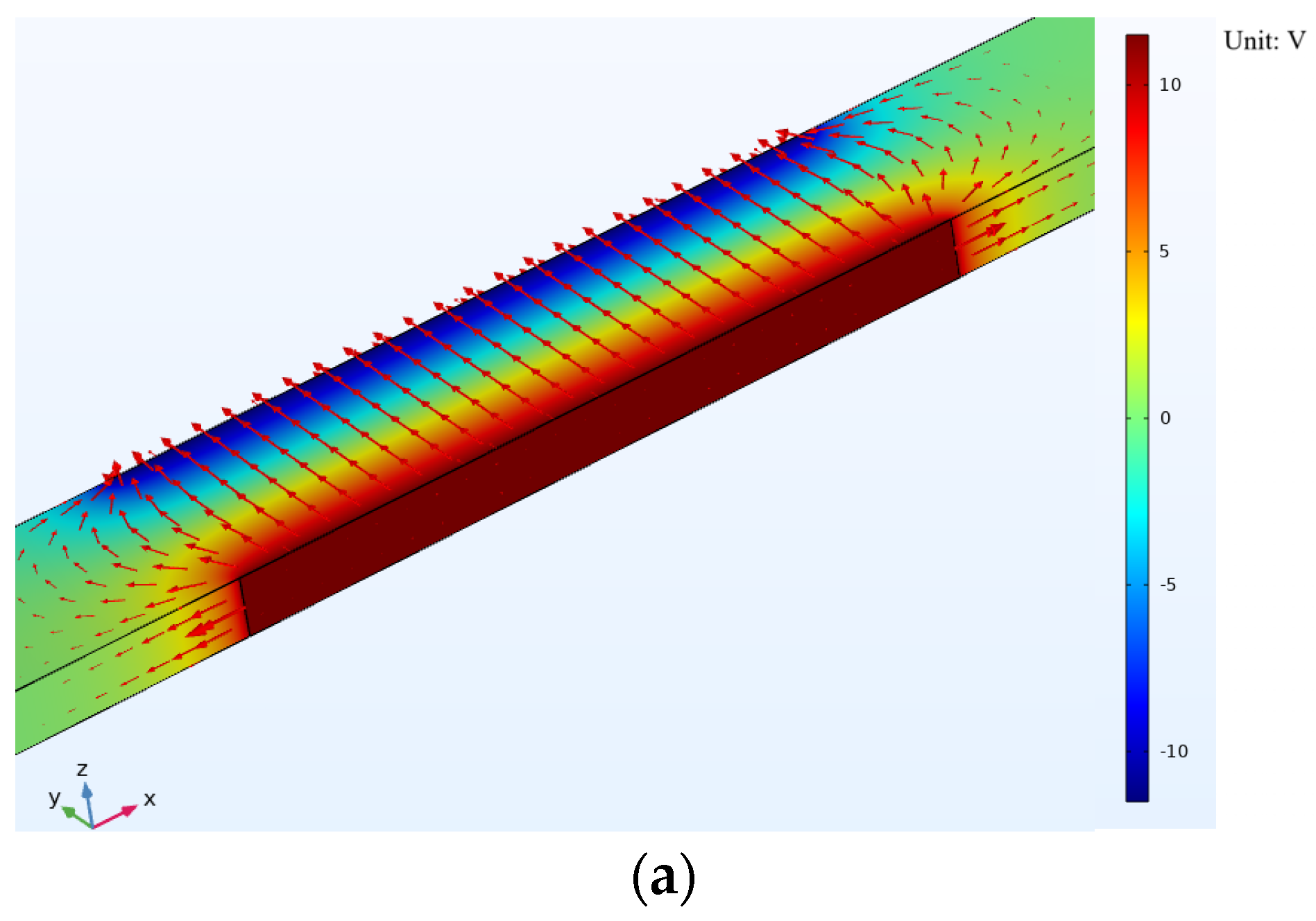
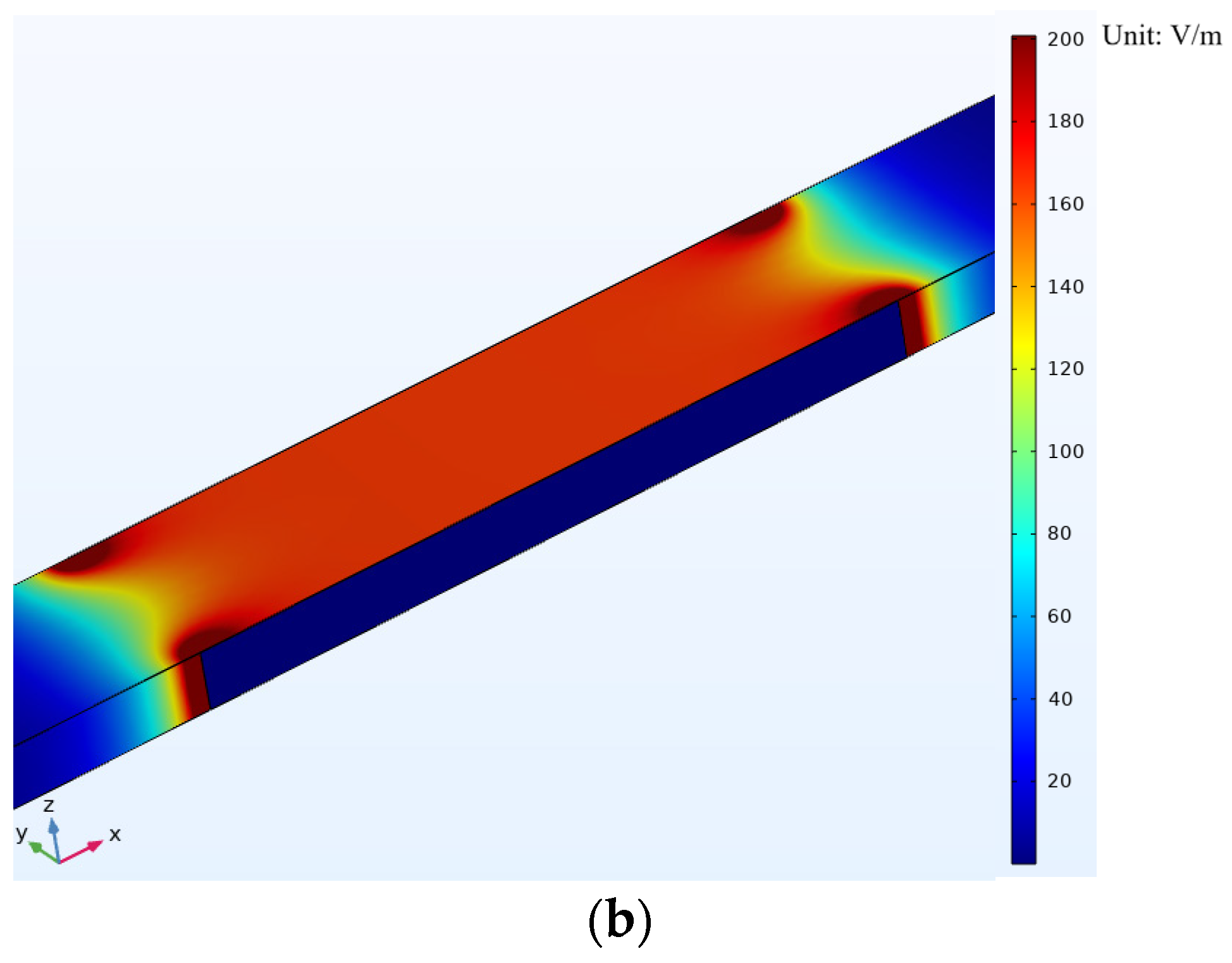
4.2. Electromagnetic Field in Duct of MHD Thruster and Lorentz Force Analysis
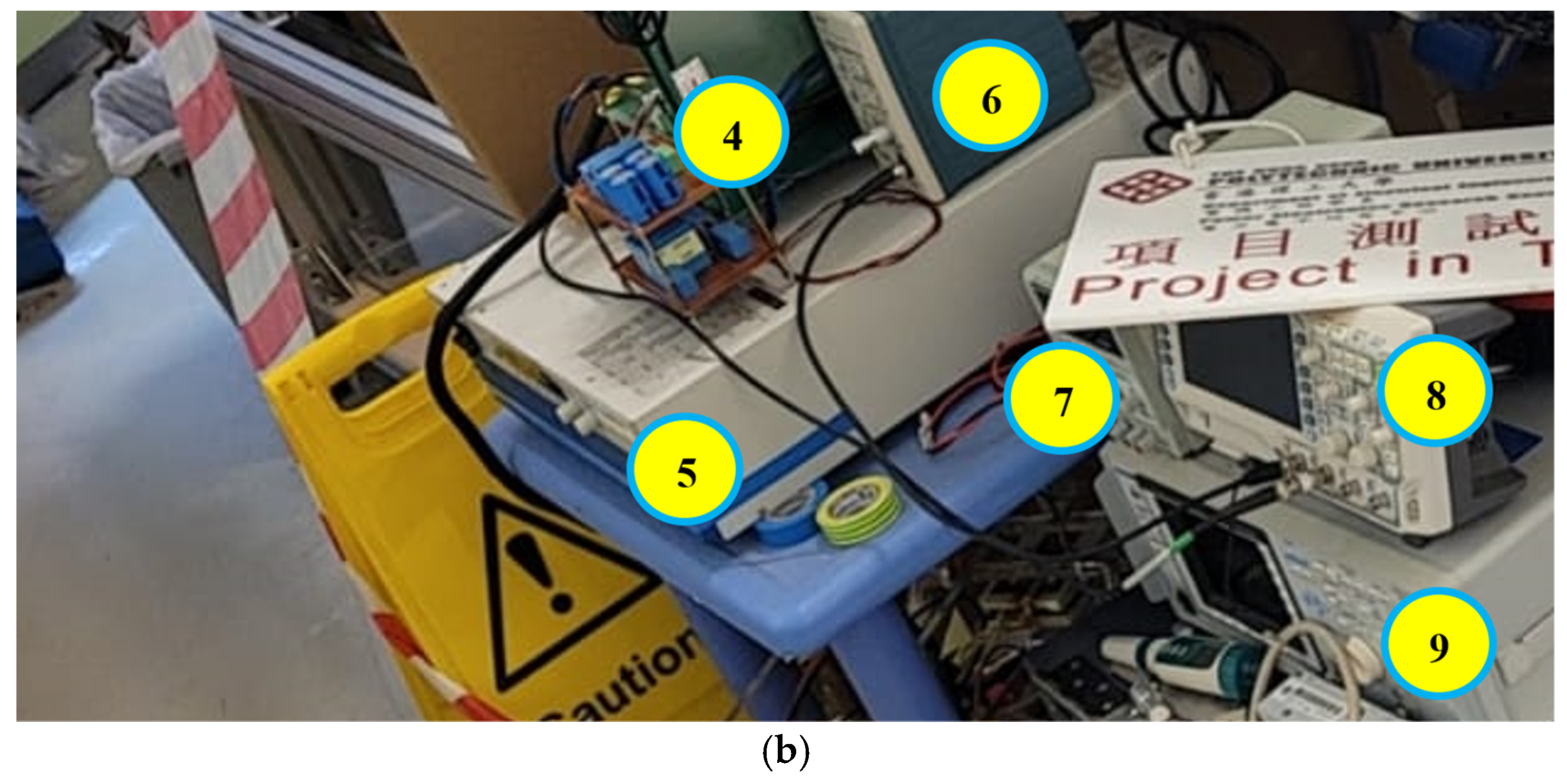
5. MHD Thruster Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Schoeman, R.P.; Patterson-Abrolat, C.; Plön, S. A Global Review of Vessel Collisions With Marine Animals. Front. Mar. Sci. 2020, 7, 292. [Google Scholar] [CrossRef]
- Byard, R.W.; Machado, A.; Woolford, L.; Boardman, W. Symmetry: The key to diagnosing propeller strike injuries in sea mammals. Forensic Sci. Med. Pathol. 2013, 9, 103–105. [Google Scholar] [CrossRef] [PubMed]
- Byard, R.W.; Winskog, C.; Machado, A.; Boardman, W. The assessment of lethal propeller strike injuries in sea mammals. J. Forensic Leg. Med. 2012, 19, 158–161. [Google Scholar] [CrossRef] [PubMed]
- Joe, D.; Vijayakumar, R. Numerical study of acoustic characteristics of a marine propeller in non-uniform flow. In Global Oceans 2020: Singapore–USS; Gulf Coast: Biloxi, MS, USA, 2020. [Google Scholar]
- Aktas, B.; Atlar, M.; Leivadaros, S.; Sasaki, N.; Fitzsimmons, P. Hydropod: An Onboard Deployed Acoustic–Visual Device for Propeller Cavitation and Noise Investigations. IEEE J. Ocean. Eng. 2019, 44, 72–86. [Google Scholar] [CrossRef]
- National Marine Fisheries Service (NMFS). Technical Guidance for Assessing the Effects of Anthropogenic Sound on Marine Mammal Hearing: Underwater Acouustic Threshoulds for Onset of Permanent and Temporary Threshould Shifts; National Marine Fisheries Service (NMFS): Silver Spring, MD, USA, 2016. [Google Scholar]
- Way, S. Electromagnetic propulsion for cargo submarines. J. Hydronautics 1968, 2, 49–57. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K. A study of the status and future of superconducting magnetic energy storage in power systems. Supercond. Sci. Technol. 2006, 19, R31–R39. [Google Scholar] [CrossRef]
- Takezawa, S.; Tamama, H.; Sugawawa, K.; Sakai, H.; Matsuyama, C.; Morita, H.; Suzuki, H.; Ueyama, Y. Operation of the thruster for superconducting electromagnetohydrodynamic propulsion ship YAMATO-1. Bull. Mar. Eng. Soc. Jpn. 1995, 23, 46–55. [Google Scholar]
- Nandi, P. Effect of alternating current on electrolytic solutions. IOSR J. Eng. 2013, 3, 58–59. [Google Scholar] [CrossRef]
- Kundu, B.; Saha, S. Review and Analysis of Electro-Magnetohydrodynamic Flow and Heat Transport in Microchannels. Energies 2022, 15, 7017. [Google Scholar] [CrossRef]
- Abbas, M.A.; Ahmed, B.; Chen, L.; Rehman, S.U.; Saleem, M.; Khudair, W.S. Analysis of Entropy Generation on Magnetohydrodynamic Flow with Mixed Convection through Porous Media. Energies 2022, 15, 1206. [Google Scholar] [CrossRef]
- Haghparast, M.; Pahlavani, M.R.A. A Comparative Study on the Performance of Marine Magnetohydrodynamic Motors With Helical and Linear Channels. IEEE Trans. Magn. 2019, 55, 1–8. [Google Scholar] [CrossRef]
- UNESCO. UNESCO (1966): Table One in the National Oceanographic Tables; National Institute of Oceanography: Paris, France; Great Britain and UNESCO: London, UK, 1966. [Google Scholar]
- Lewis, E. The practical salinity scale 1978 and its antecedents. IEEE J. Ocean. Eng. 1980, 5, 3–8. [Google Scholar] [CrossRef]
- Alicki, R.; Gelbwaser-Klimovsky, D.; Jenkins, A. Leaking elastic capacitor as model for active matter. Phys. Rev. E 2021, 103, 052131. [Google Scholar] [CrossRef]
- Rahmawati, E.; Santoso, D.R.; Noor, J.A.F.; Nadhir, A. Electrical impedance analysis of NaCl and CaCl2 solutions based on equivalent electric circuit. J. Phys. Conf. Ser. 2022, 2165, 012025. [Google Scholar] [CrossRef]
- Lima, L.F.; Vieira, A.L.; Mukai, H.; Andrade, C.M.G.; Fernandes, P.R.G. Electric impedance of aqueous KCl and NaCl solutions: Salt concentration dependence on components of the equivalent electric circuit. J. Mol. Liq. 2017, 241, 530–539. [Google Scholar] [CrossRef]
- Haghparast, M.; Pahlavani, M.R.A.; Azizi, D. Fully 3-D Numerical Investi-gation of Phenomena Occurring in Marine Magnetohydrodynamic Thrusters. IEEE Trans. Plasma Sci. 2019, 47, 1818–1826. [Google Scholar] [CrossRef]
- Yoon, H.S.; Eum, Y.H.; Zhang, Y.; Shin, P.-S.; Koh, C.S. Comparison of Magnetic Reluctivity Models for FEA Considering Two-Dimensional Magnetic Properties. IEEE Trans. Magn. 2009, 45, 1202–1205. [Google Scholar] [CrossRef]
- Wang, D.; Yang, W.; Yang, J.; Jiang, K.; Fu, Y. Research on Electromagnetic Vibra-tion Characteristics of a Permanent Magnet Synchronous Motor Based on Mul-ti-Physical Field Coupling. Energies 2023, 16, 3916. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Evans, P. Calculation of winding losses in high-frequency toroidal inductors using multistrand conductors. IEE Proc.-Electr. Power Appl. 1995, 142, 312–322. [Google Scholar] [CrossRef]
- Lee, D.W.; Hong, B.G.; Kim, Y.; In, W.K.; Yoon, K.H. Preliminary design of a helium cooled molten lithium test blanket module for the ITER test in Korea. Fusion Eng. Des. 2007, 82, 381–388. [Google Scholar] [CrossRef]
- Lee, D.W.; Yoon, J.S.; Kim, S.H.; Kim, M.H.; Cho, S. MHD Analysis and Preparation of an Experiment for Developing the Korean Test Blanket Module. IEEE Trans. Plasma Sci. 2012, 40, 1472–1476. [Google Scholar] [CrossRef]
- Gregory, T.S.; Wu, K.J.; Yu, J.; Box, J.B.; Cheng, R.; Mao, L.; Tang, G.; Tse, Z.T.H. Magnetohydrodynamic-driven design of microscopic endocapsules in MRI. IEEE/ASME Trans. Mechatron. 2015, 20, 2691–2698. [Google Scholar] [CrossRef]
- Zeeshan, A.; Ijaz, N.; Abbas, T.; Ellahi, R. The sustainable characteristic of bio-bi-phase flow of peristaltic transport of MHD Jeffrey fluid in the human body. Sustainability 2018, 10, 2671. [Google Scholar] [CrossRef]
- West, J.; Karamata, B.; Lillis, B.; Gleeson, J.P.; Alderman, J.; Collins, J.K.; Lane, W.; Mathewsona, A.; Berneya, H. Application of magnetohydrodynamic actuation to continuous flow chemistry. Lab Chip 2002, 2, 224–230. [Google Scholar] [CrossRef] [PubMed]
- Bau, H.H. Applications of Magneto Electrochemistry and Magnetohydrodynamics in Microfluidics. Magnetochemistry 2022, 8, 140. [Google Scholar] [CrossRef]
- Lim, A.E.; Goh, S. Effect of Microchannel Diameter on Electroosmotic Flow Hysteresis. Energies 2023, 16, 2154. [Google Scholar] [CrossRef]
- Lim, A.E.; Lam, Y.C. Electroosmotic Flow Hysteresis for Fluids with Dissimilar pH and Ionic Species. Micromachines 2021, 12, 1031. [Google Scholar] [CrossRef]
- Cheng, K.W.E. Storage energy for classical switched mode power converters. IEE Proc.-Electr. Power Appl. 2003, 150, 439–446. [Google Scholar] [CrossRef]
- Lewis, E.L.; Perkin, R.G. The Practical Salinity Scale 1978 conversion of existing data. Deep-Sea Res. 1981, 28, 307–328. [Google Scholar] [CrossRef]
- Perkin, R.G.; Lewis, E.L. The Practical Salinity Scale 1978 Fitting the data. IEEE J. Ocean. Eng. 1980, 5, 9–16. [Google Scholar] [CrossRef]
- UNESCO. Tenth Report of the Joint Panel on Oceanographic Tables and Standards; United Nations Educational, Scienticfic and Cultural Organization: Paris, France, 1981. [Google Scholar]
- Garg, A.K. Classical Electromagnetism in a Nutshell, Princeton; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Kan, K.L.J.; Cheng, K.W.E. Inductor-Aid Step-Up LLC Resonant Wireless Power Transfer. IEEE Access 2023, 11, 13370–13382. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |||||
| 12.0 °C | 15.0 °C | 16.0 °C | 18.0 °C | 20.0 °C | |
| 10 kHz | 4.024 | 4.246 | 4.337 | 4.648 | 4.848 |
| 25 kHz | 4.042 | 4.275 | 4.369 | 4.697 | 4.879 |
| 64 kHz | 4.077 | 4.306 | 4.400 | 4.705 | 4.881 |
| 148 kHz | 4.113 | 4.348 | 4.458 | 4.782 | 4.964 |
| 300 kHz | 4.229 | 4.457 | 4.584 | 4.832 | 5.001 |
| 700 kHz | 4.695 | 4.890 | 4.991 | 5.254 | 5.435 |
| 1200 kHz | 5.719 | 5.878 | 5.953 | 6.082 | 6.258 |
| mKCl‰ = 32.44‰, 0.0% higher than the standard salinity. | |||||
| (b) | |||||
| 13.1 °C | 15.0 °C | 16.5 °C | 18.0 °C | 20.0 °C | |
| 10 kHz | 3.275 | 3.427 | 3.550 | 3.689 | 3.832 |
| 25 kHz | 3.298 | 3.449 | 3.574 | 3.711 | 3.856 |
| 64 kHz | 3.321 | 3.476 | 3.596 | 3.739 | 3.878 |
| 148 kHz | 3.360 | 3.512 | 3.634 | 3.774 | 3.916 |
| 300 kHz | 3.484 | 3.635 | 3.754 | 3.891 | 4.030 |
| 700 kHz | 4.074 | 4.212 | 4.311 | 4.421 | 4.548 |
| 1200 kHz | 5.340 | 5.428 | 5.482 | 5.548 | 5.666 |
| mNaCl‰ = 25.41‰, 0.0% higher than the equivalent standard salinity. | |||||
| (c) | |||||
| 15.0 °C | 16.0 °C | 17.0 °C | 18.0 °C | 20.0 °C | |
| 10 kHz | 4.502 | 4.582 | 4.658 | 4.751 | 4.945 |
| 25 kHz | 4.537 | 4.618 | 4.695 | 4.788 | 4.980 |
| 64 kHz | 4.575 | 4.658 | 4.735 | 4.828 | 5.019 |
| 148 kHz | 4.618 | 4.702 | 4.779 | 4.873 | 5.062 |
| 300 kHz | 4.721 | 4.803 | 4.878 | 4.973 | 5.156 |
| 700 kHz | 5.177 | 5.253 | 5.318 | 5.407 | 5.568 |
| 1200 kHz | 6.123 | 6.186 | 6.236 | 6.305 | 6.424 |
| mMgCl2‰ = 39.93‰, +0.2% higher than the equivalent standard salinity. | |||||
| KCl | 12.0 °C | 15.0 °C | 16.0 °C | 18.0 °C | 20.0 °C |
|---|---|---|---|---|---|
| 10 kHz | 35.70 | 35.04 | 34.98 | 35.97 | 35.93 |
| 25 kHz | 35.88 | 35.30 | 35.27 | 36.39 | 36.19 |
| 64 kHz | 36.22 | 35.59 | 35.55 | 36.46 | 36.20 |
| 148 kHz | 36.58 | 35.98 | 36.07 | 37.13 | 36.90 |
| 300 kHz | 37.74 | 36.99 | 37.22 | 37.57 | 37.21 |
| 700 kHz | 42.44 | 41.06 | 40.94 | 41.29 | 40.87 |
| 1200 kHz | 53.11 | 50.60 | 50.04 | 48.76 | 47.98 |
| (a) | ||||||
| Aluminum | f (kHz) | 10 | 25 | 64 | 148 | 300 |
| 0.35 V Vetd | Cetd (μF) | 24.49 | 19.89 | 15.54 | 3.84 | 1.11 |
| Relyt (Ω) | 2.13 | 2.13 | 2.04 | 1.94 | 1.93 | |
| 5 V Vetd | Cetd (μF) | 25.67 | 14.81 | 9.95 | 2.34 | 0.78 |
| Retd (Ω) | 2.02 | 2.05 | 1.99 | 1.99 | 1.96 | |
| Relys (Ω) | 35.65 | 57.49 | 80.88 | 87.65 | 92.52 | |
| 7 V Vetd | Cetd (μF) | 31.21 | 17.21 | 9.95 | 3.07 | 0.67 |
| Retd (Ω) | 2.10 | 2.01 | 1.97 | 2.13 | 2.03 | |
| Relys (Ω) | 142.55 | 36.90 | 57.25 | 71.32 | 83.38 | |
| (b) | ||||||
| 316 stainless steel | f (kHz) | 10 | 25 | 64 | 148 | 300 |
| 0.35 V Vetd | Cetd (μF) | 88.42 | 87.24 | 82.89 | 4.14 | 1.23 |
| Relyt (Ω) | 2.46 | 2.39 | 2.30 | 2.22 | 2.19 | |
| 5 V Vetd | Cetd (μF) | 265.26 | 127.32 | 31.09 | 5.97 | 1.66 |
| Retd (Ω) | 2.17 | 2.11 | 2.10 | 2.09 | 2.07 | |
| Relys (Ω) | 18.17 | 28.64 | 23.77 | 34.62 | 38.48 | |
| 7 V Vetd | Cetd (μF) | 397.89 | 127.32 | 41.45 | 6.33 | 1.83 |
| Retd (Ω) | 2.05 | 2.02 | 2.02 | 2.02 | 2.11 | |
| Relys (Ω) | 12.194 | 12.85 | 16.41 | 21.99 | 59.41 | |
| (c) | ||||||
| Zinc | f (kHz) | 10 | 25 | 64 | 148 | 300 |
| 0.35 V Vetd | Cetd (μF) | 72.34 | 70.74 | 27.63 | 3.36 | 1.02 |
| Relyt (Ω) | 3.40 | 3.33 | 3.22 | 3.14 | 3.06 | |
| 5 V Vetd | Cetd (μF) | 265.26 | 90.95 | 22.61 | 4.89 | 2.12 |
| Retd (Ω) | 2.04 | 1.99 | 2.04 | 2.03 | 2.1 | |
| Relys (Ω) | 5.09 | 4.95 | 5.56 | 5.76 | 6.72 | |
| 7 V Vetd | Cetd (μF) | 265.26 | 159.15 | 12.43 | 8.96 | 1.71 |
| Retd (Ω) | 1.95 | 1.95 | 1.96 | 1.92 | 2.08 | |
| Relys (Ω) | 4.57 | 4.71 | 5.00 | 4.95 | 6.52 | |
| No. | Layer | a (mm) | b (mm) | 21 A, B (mT) | 30 A, B (mT) | |
|---|---|---|---|---|---|---|
| Pancake coil | 1 | 1 | 0 | 20 | 2.98 | 4.21 |
| 2 | 1 | 0 | 10 | 2.89 | 4.13 | |
| 3 | 1 | 0 | 5 | 2.85 | 4.07 | |
| 4 | 1 | 5 | 5 | 4.52 | 6.46 | |
| 5 | 1 | 5 | 10 | 4.52 | 6.46 | |
| 6 | 1 | 10 | 5 | 4.52 | 6.46 | |
| 7 | 2 | 0 | 20 | 7.10 | 9.00 | |
| Saddle coil | 8 | 1 | 0 | 20 | 3.24 | 4.63 |
| 9 | 1 | 0 | 10 | 3.23 | 4.15 | |
| 10 | 1 | 0 | 5 | 3.22 | 4.11 | |
| 11 | 1 | 5 | 5 | 3.84 | 5.49 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kan, K.L.J.; Cheng, K.W.E.; Zhuang, H.-C. Electric Analysis of the Maritime Application High-Frequency Magnetohydrodynamic Thruster. Energies 2023, 16, 6021. https://doi.org/10.3390/en16166021
Kan KLJ, Cheng KWE, Zhuang H-C. Electric Analysis of the Maritime Application High-Frequency Magnetohydrodynamic Thruster. Energies. 2023; 16(16):6021. https://doi.org/10.3390/en16166021
Chicago/Turabian StyleKan, Kin Lung Jerry, Ka Wai Eric Cheng, and Hai-Chen Zhuang. 2023. "Electric Analysis of the Maritime Application High-Frequency Magnetohydrodynamic Thruster" Energies 16, no. 16: 6021. https://doi.org/10.3390/en16166021