
A Comprehensive Investigation of Winding Eddy and Circulating Current Losses of Stator Iron Coreless PMBLDC Motors



Abstract
:1. Introduction
2. Structural and Analytical Modeling
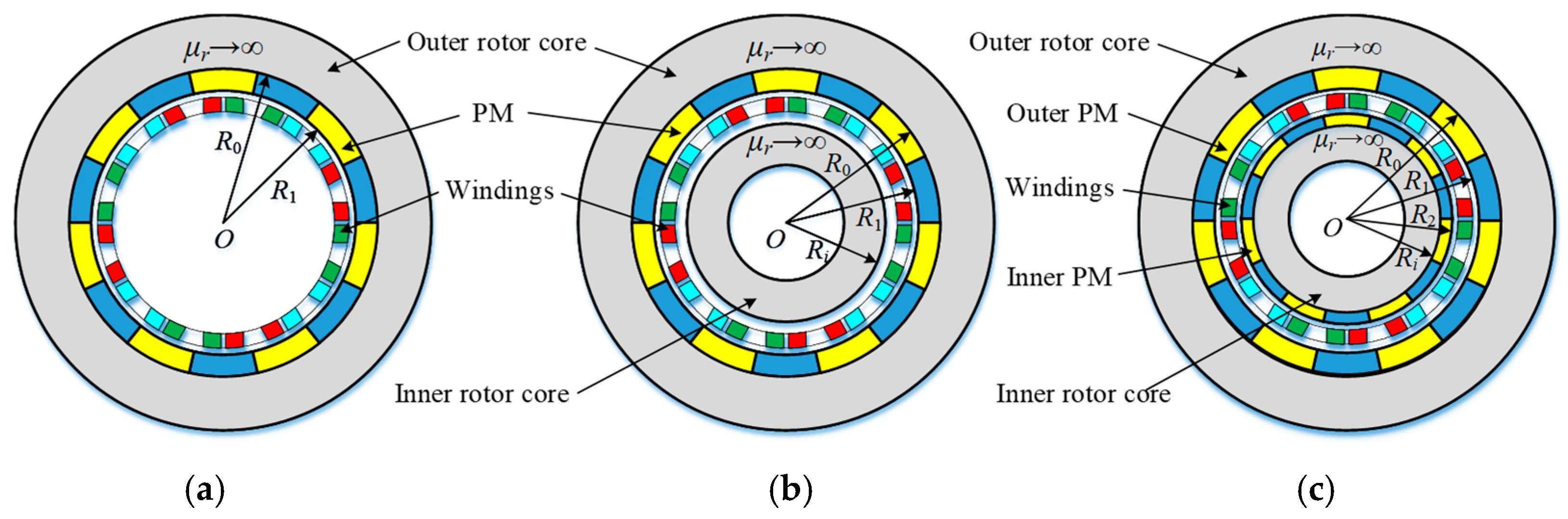
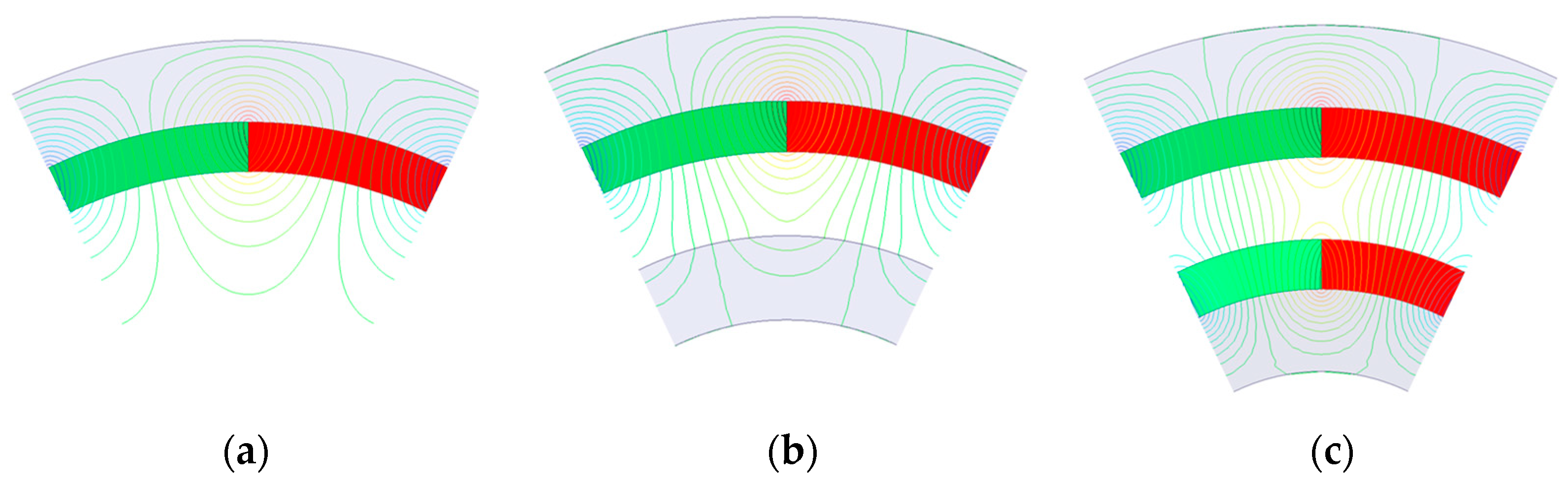
2.1. Structures and Structural Parameters of Iron Coreless PMBLDC Motors
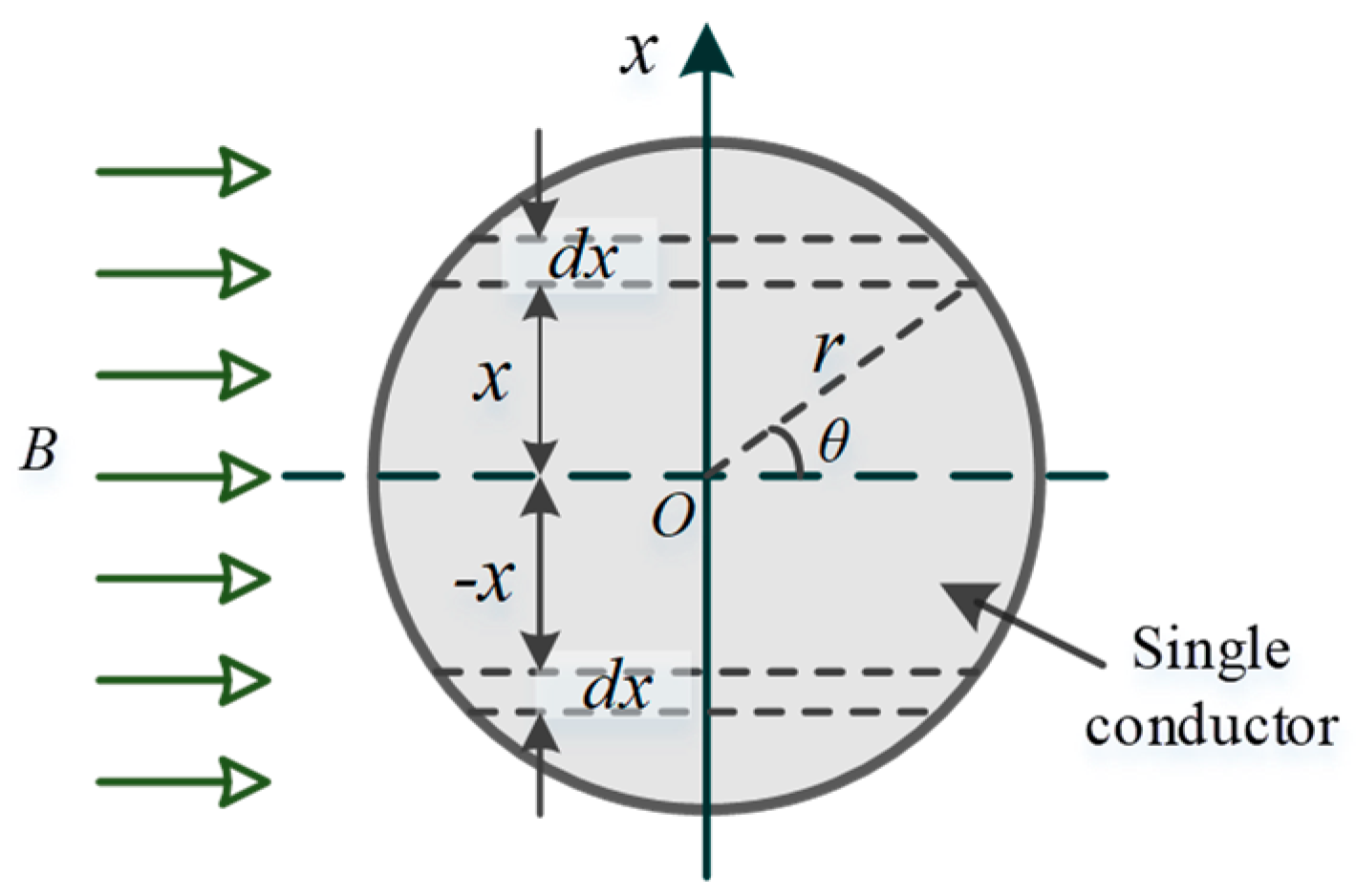
2.2. Analytical Model of Eddy Current Loss in a Round Wire
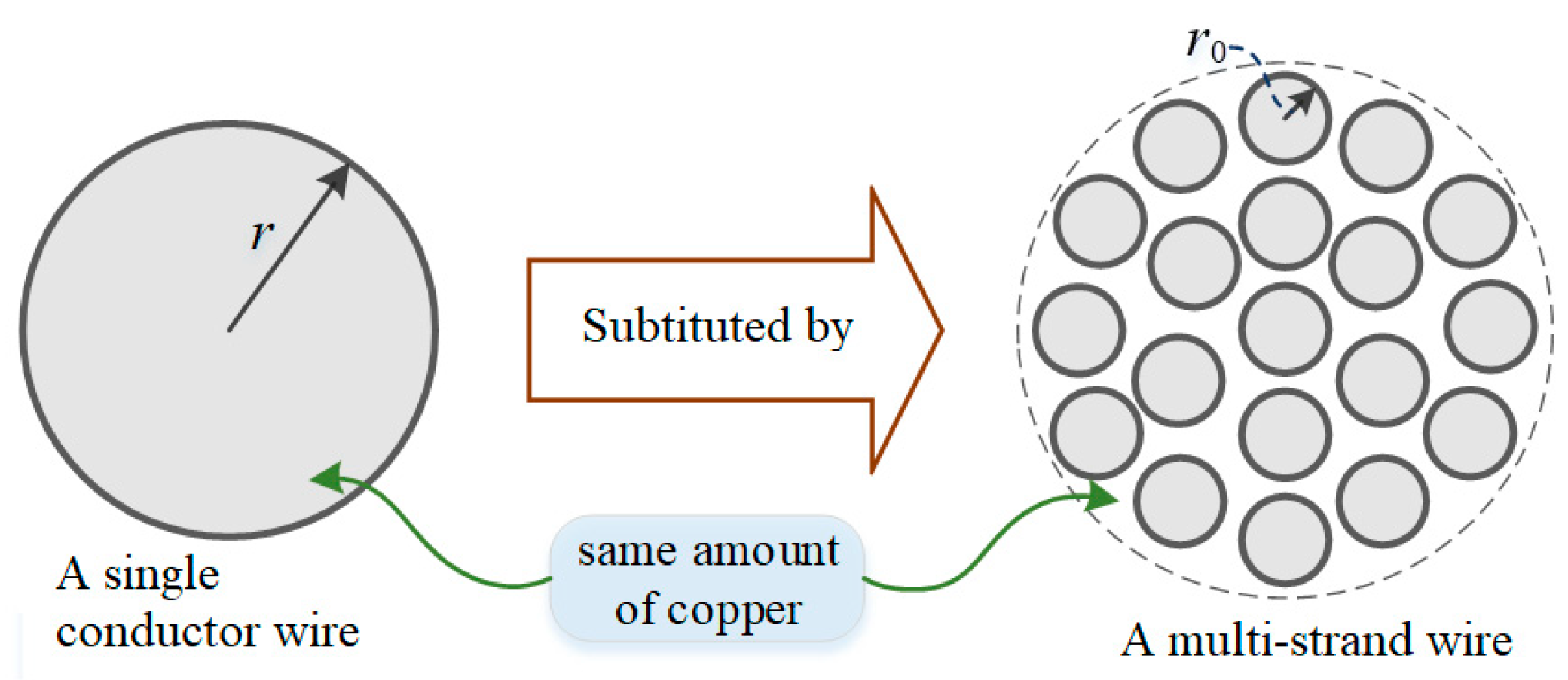
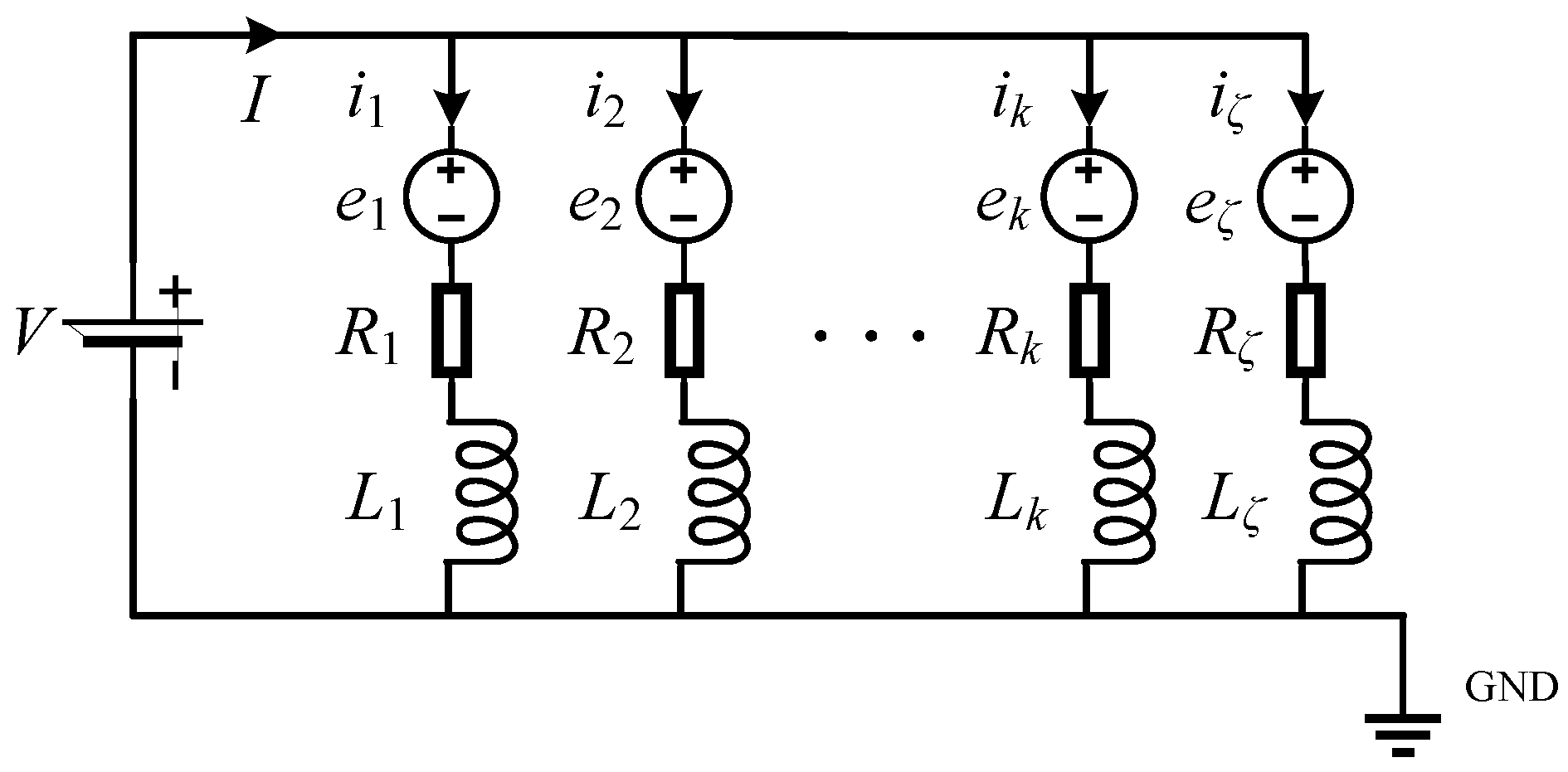
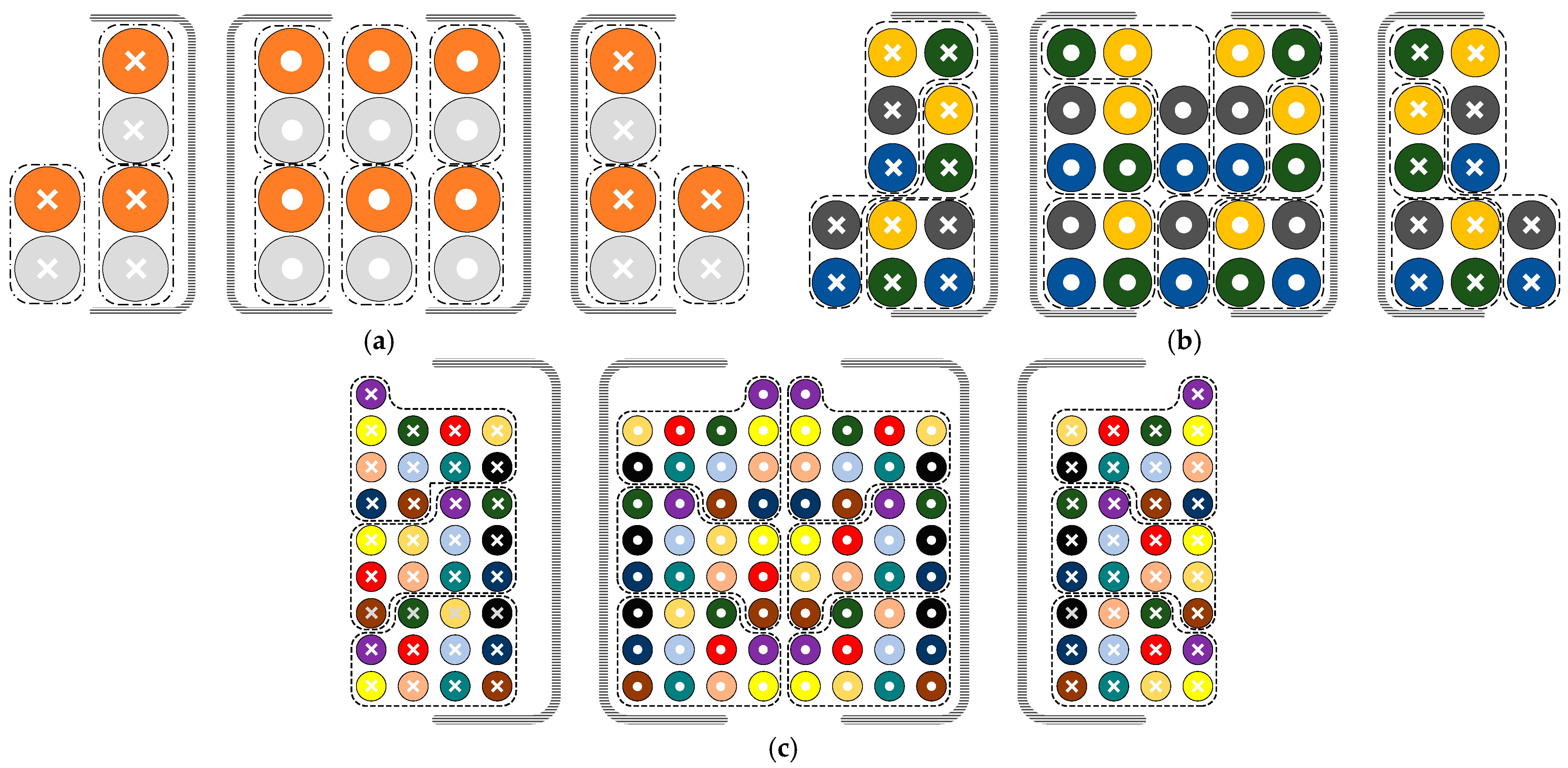
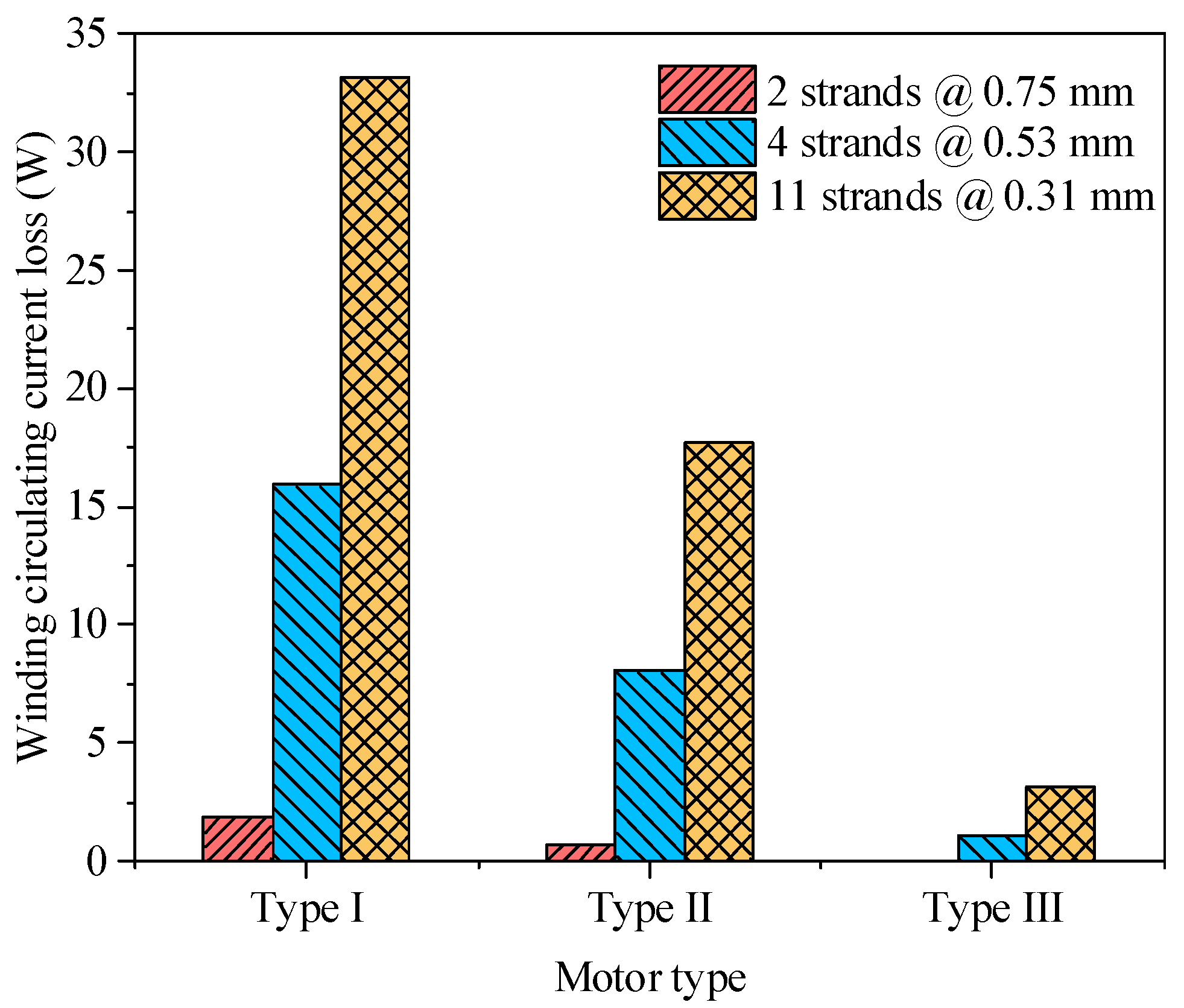
2.3. Circulating Current Loss of Multiple Parallel Strands
3. Eddy and Circulating Current Losses
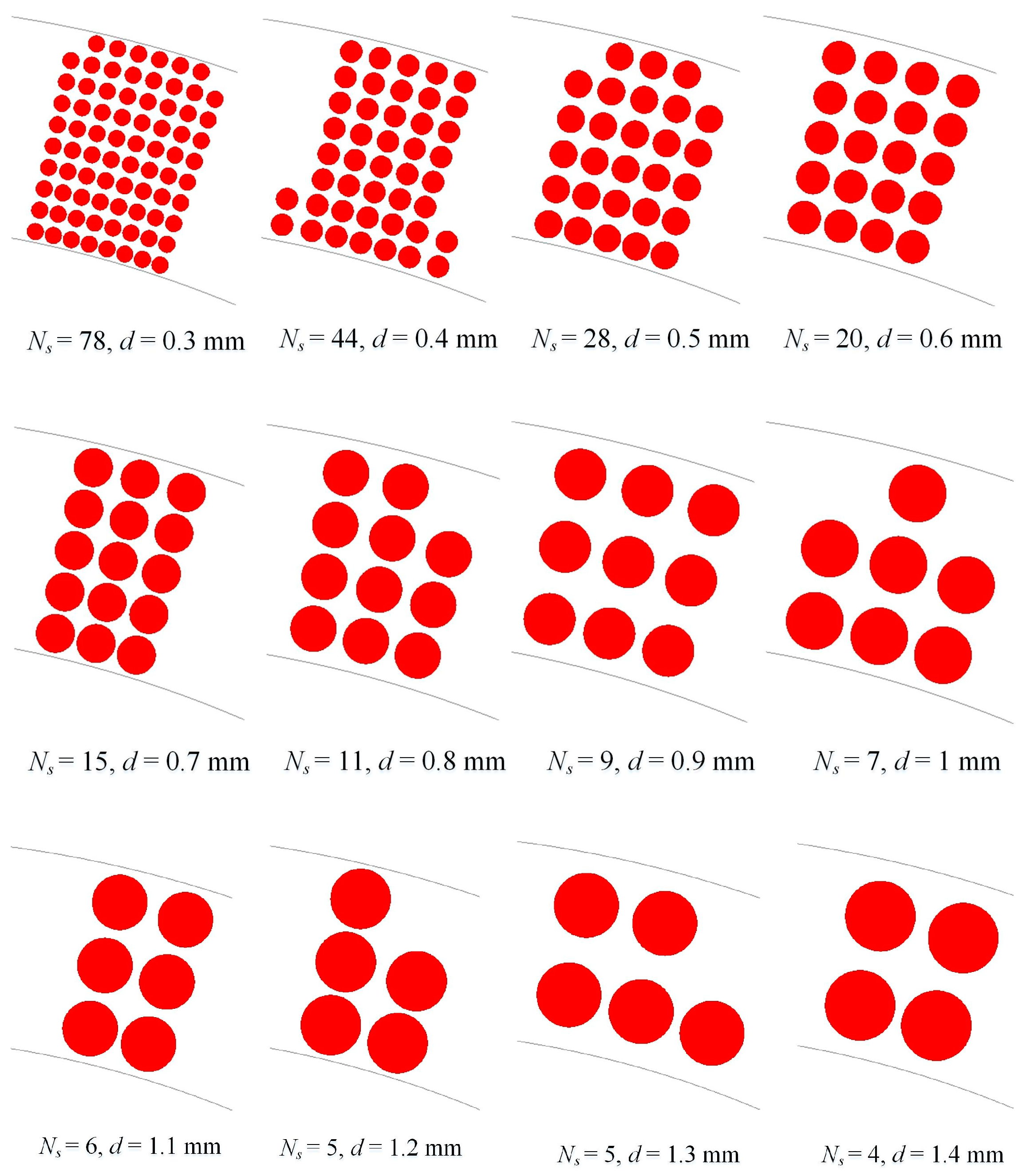
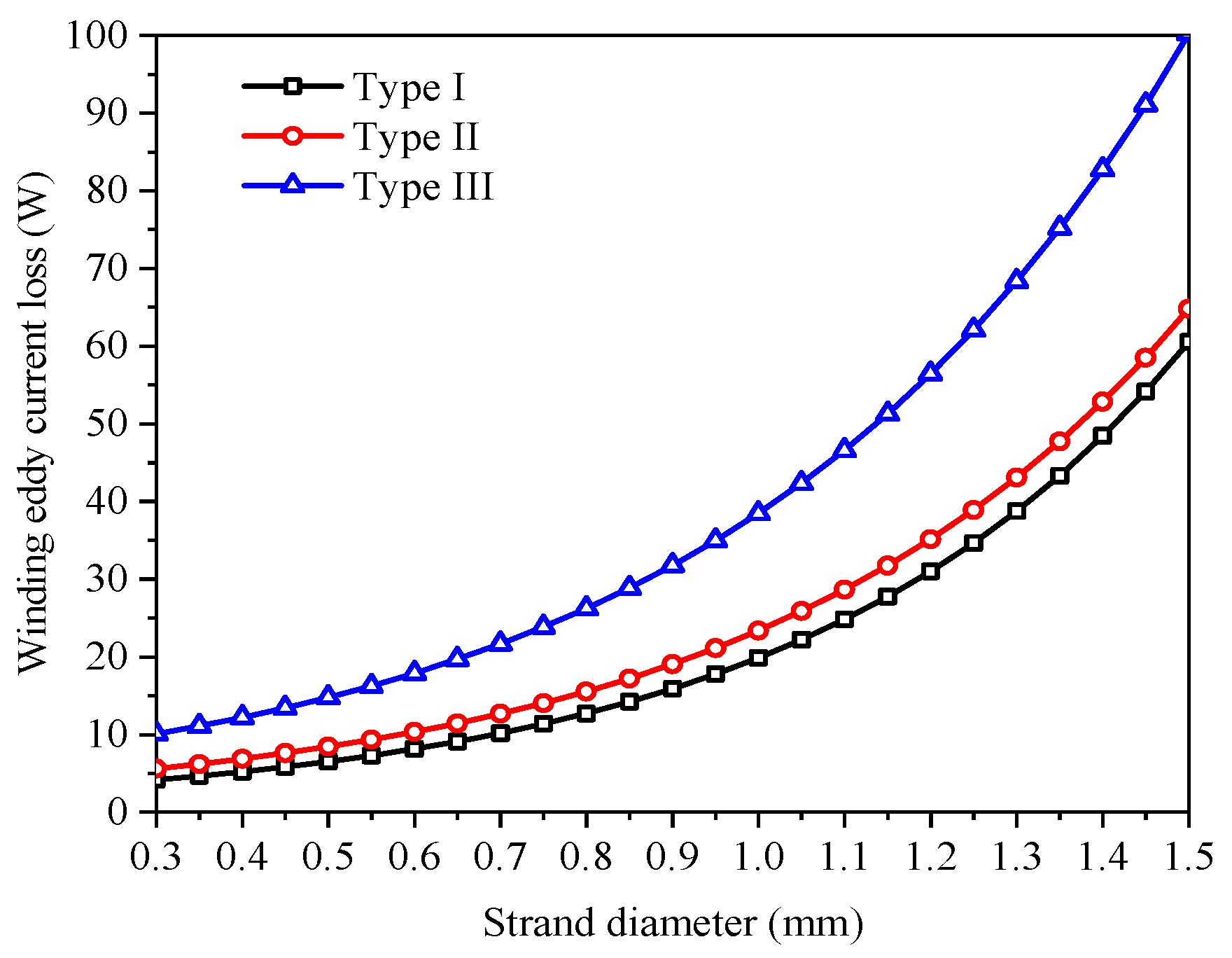
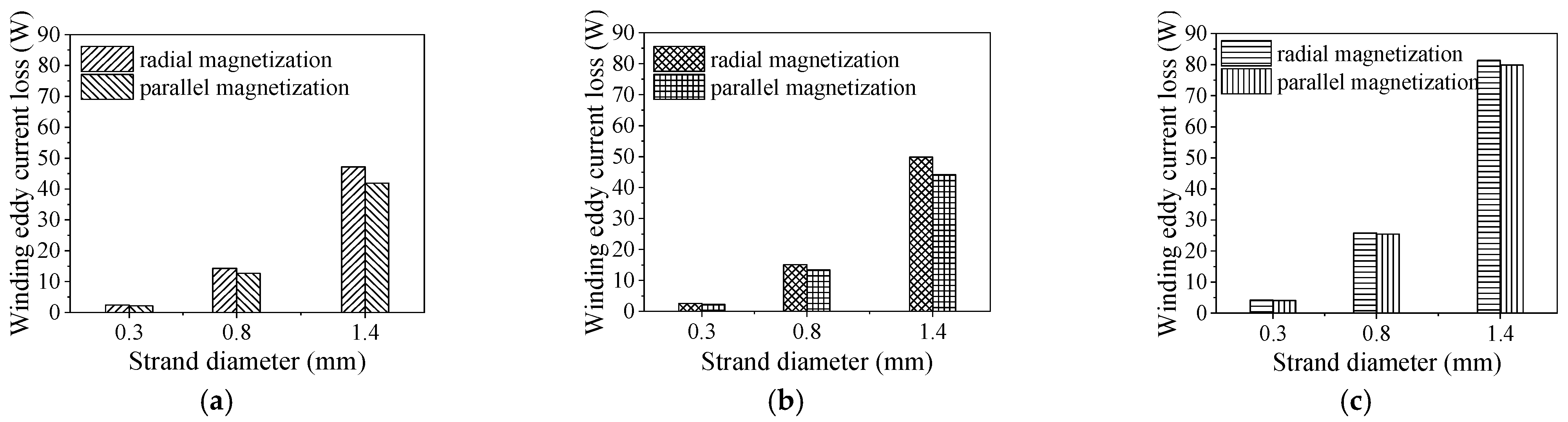
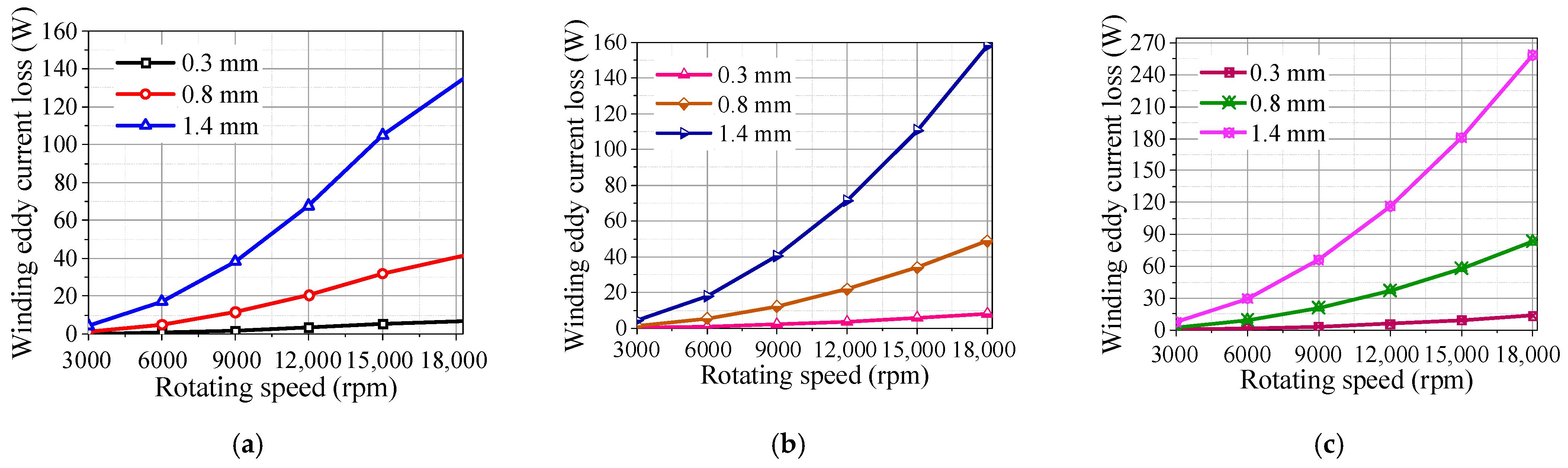
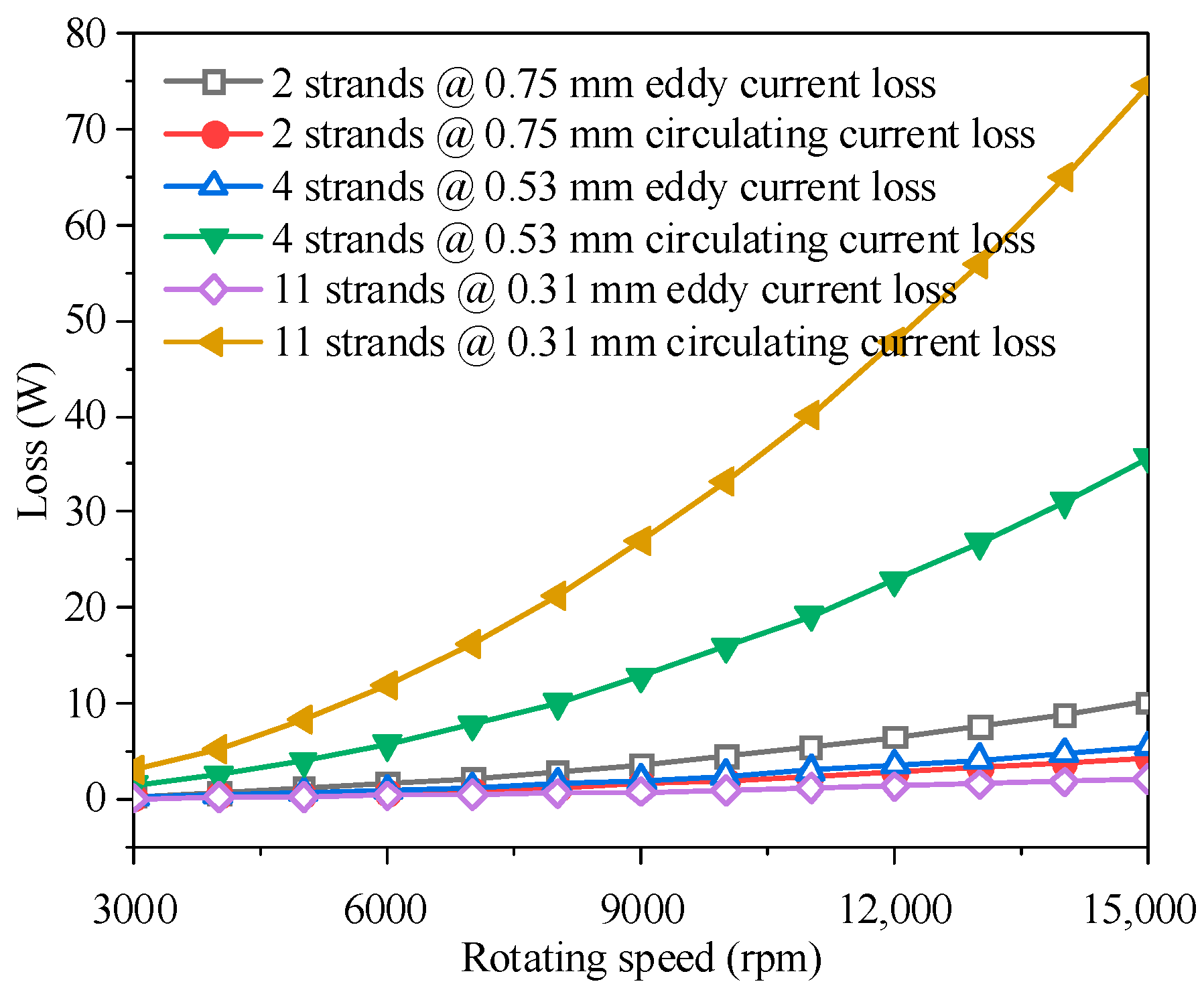
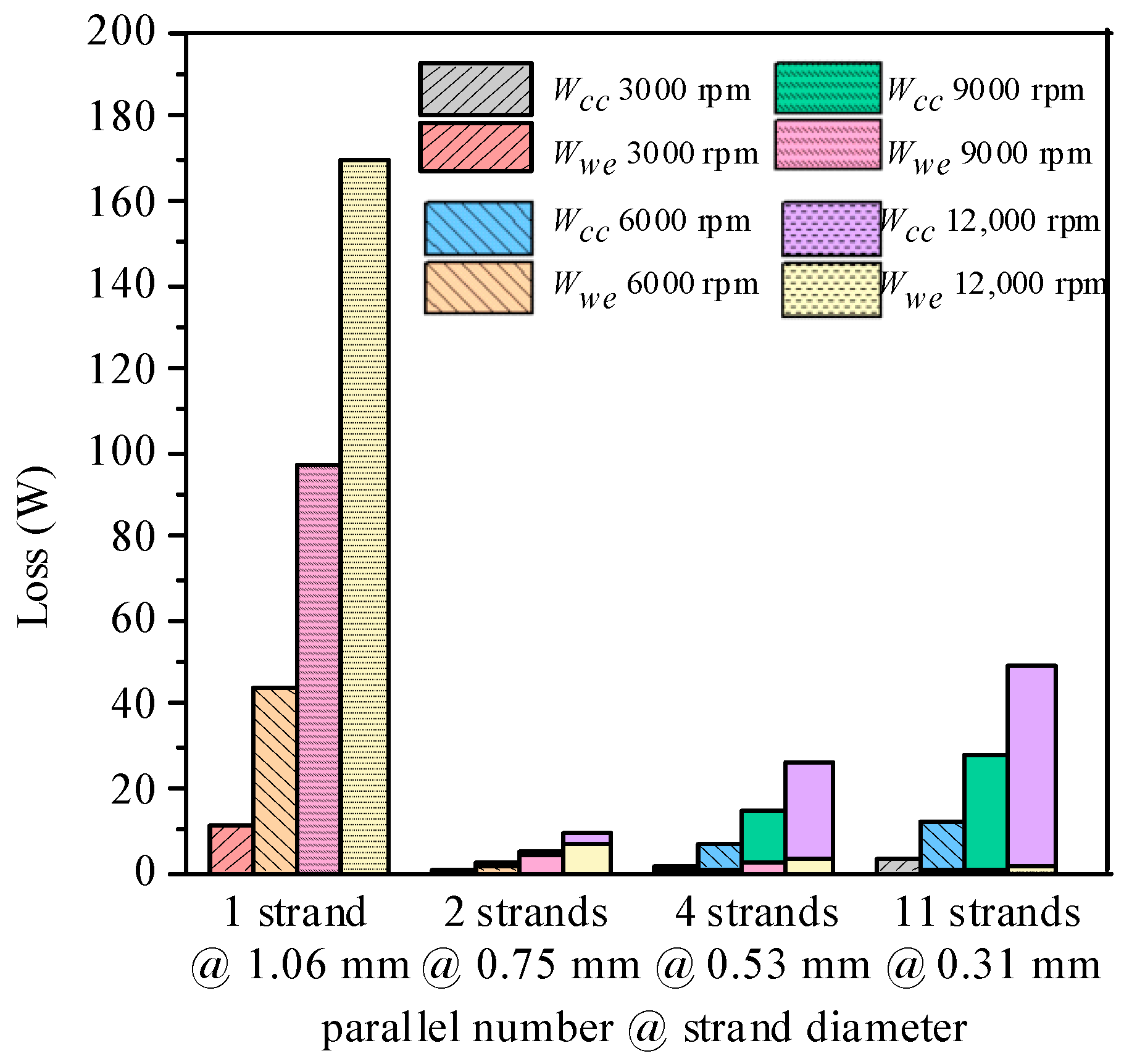
3.1. Effects of Strand Diameter
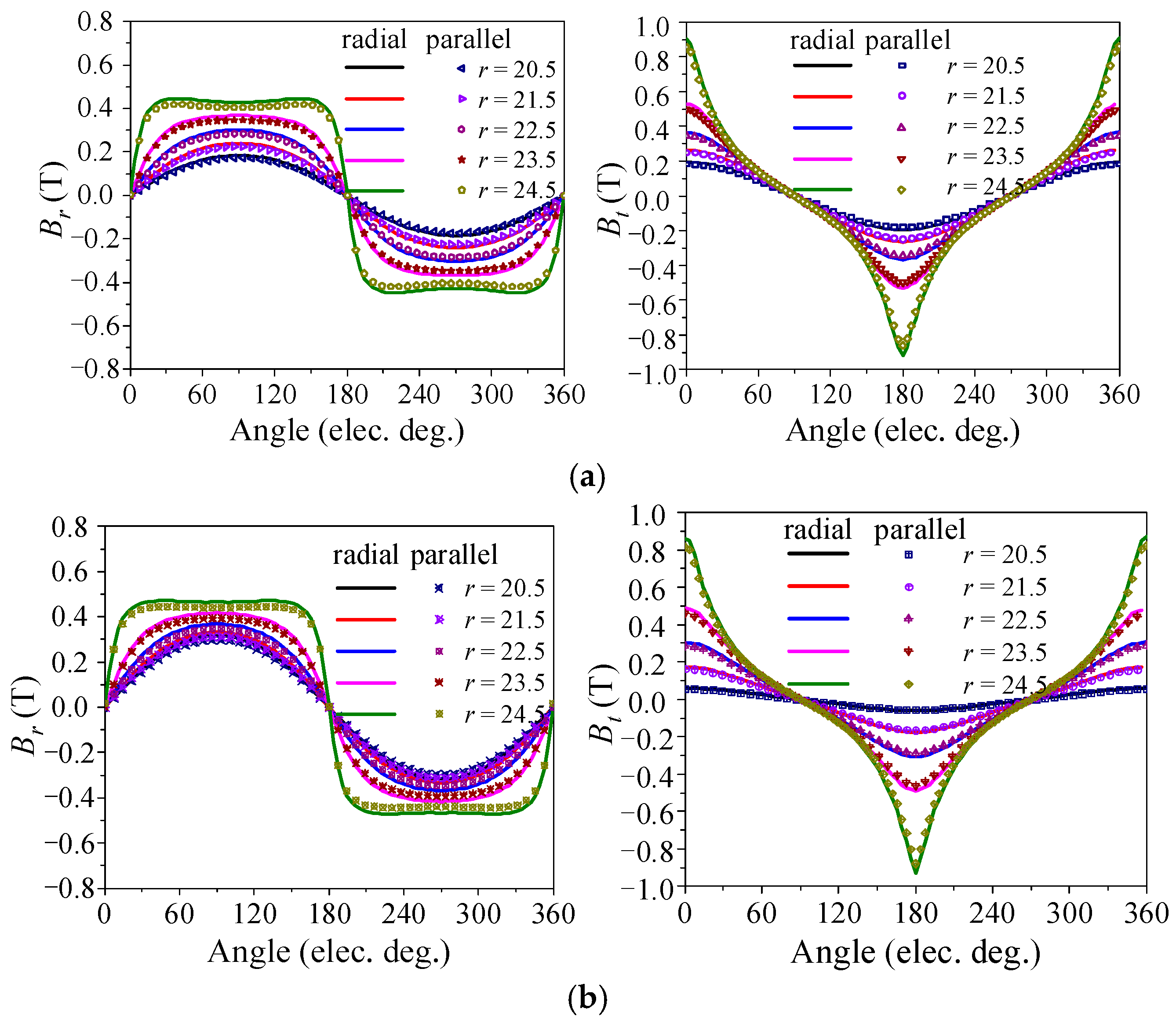
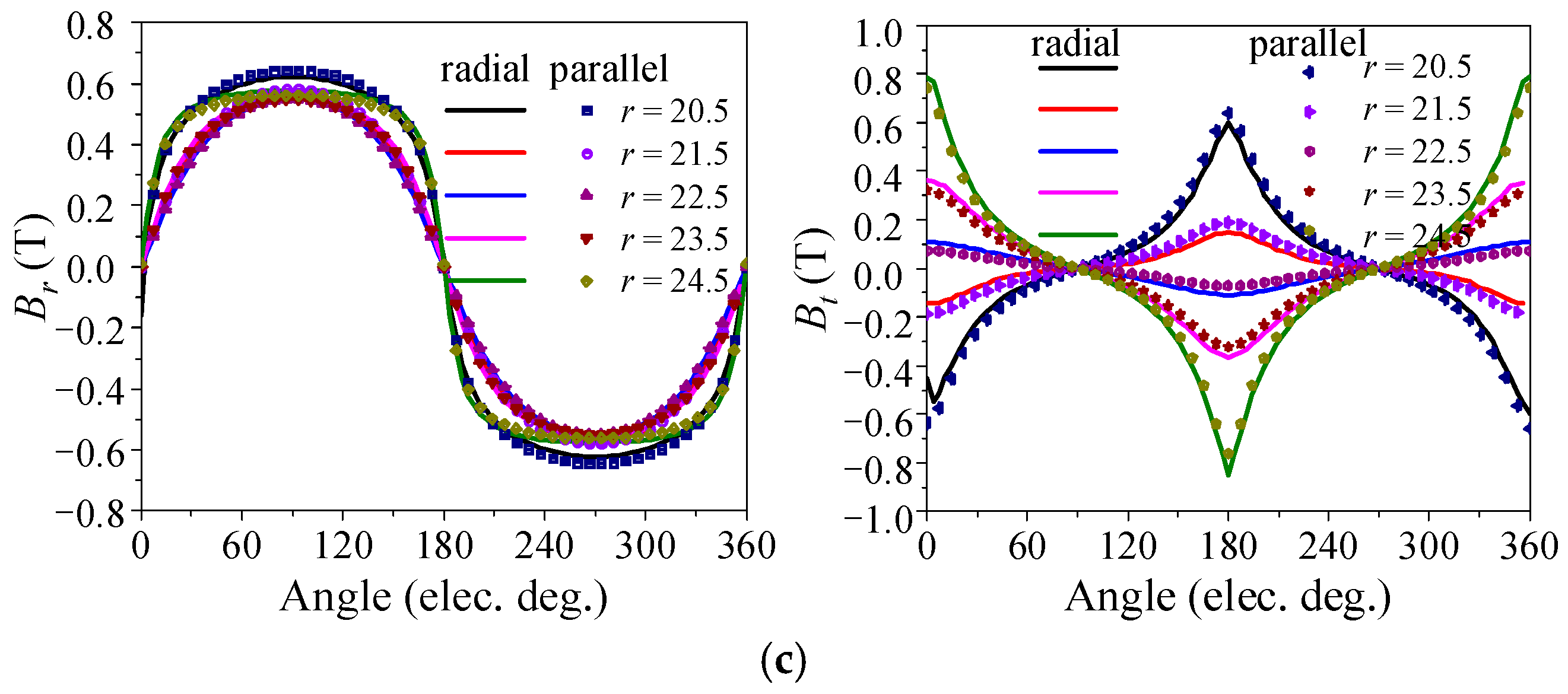
3.2. Effects of Magnetization
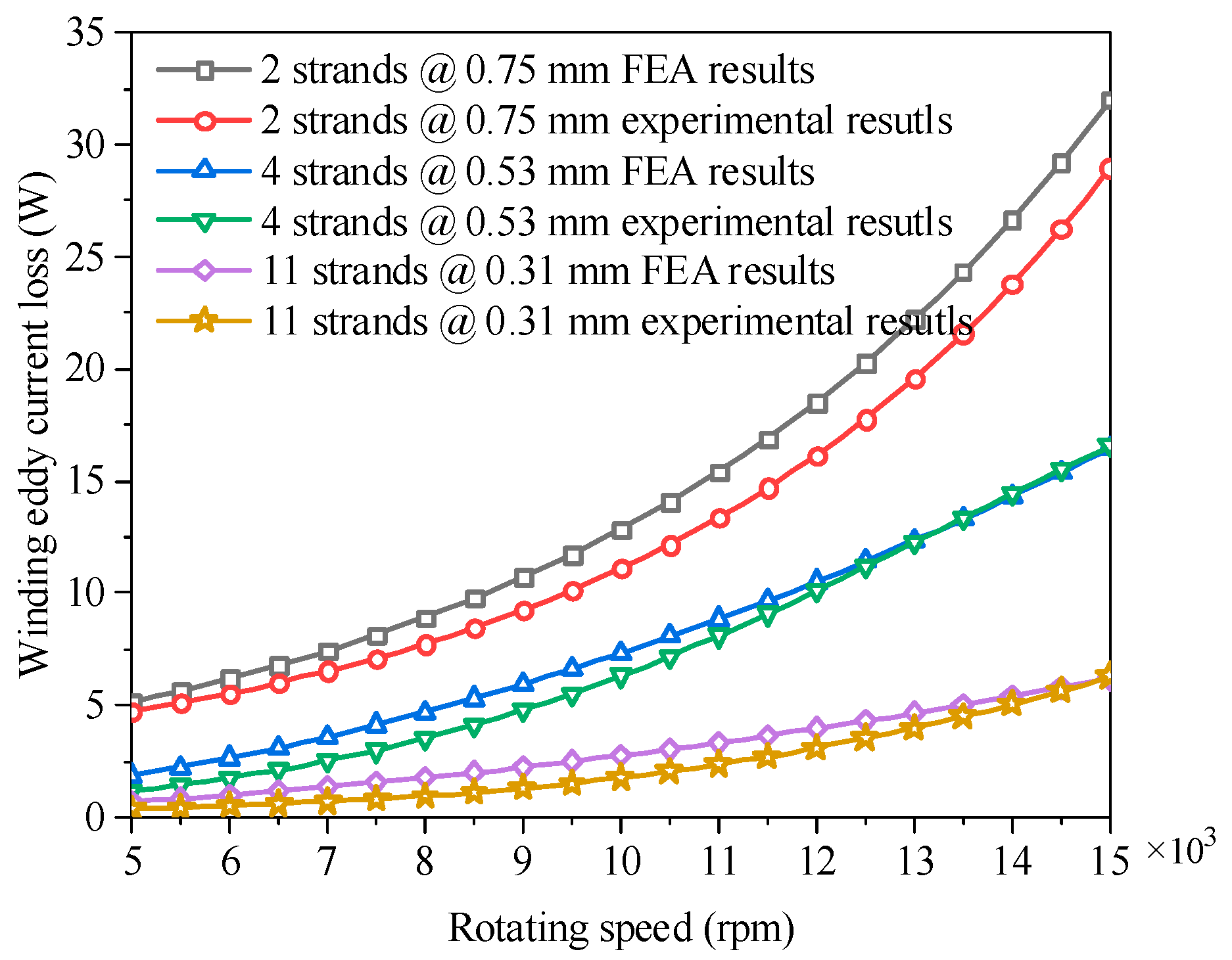
3.3. Effects of Rotating Speed
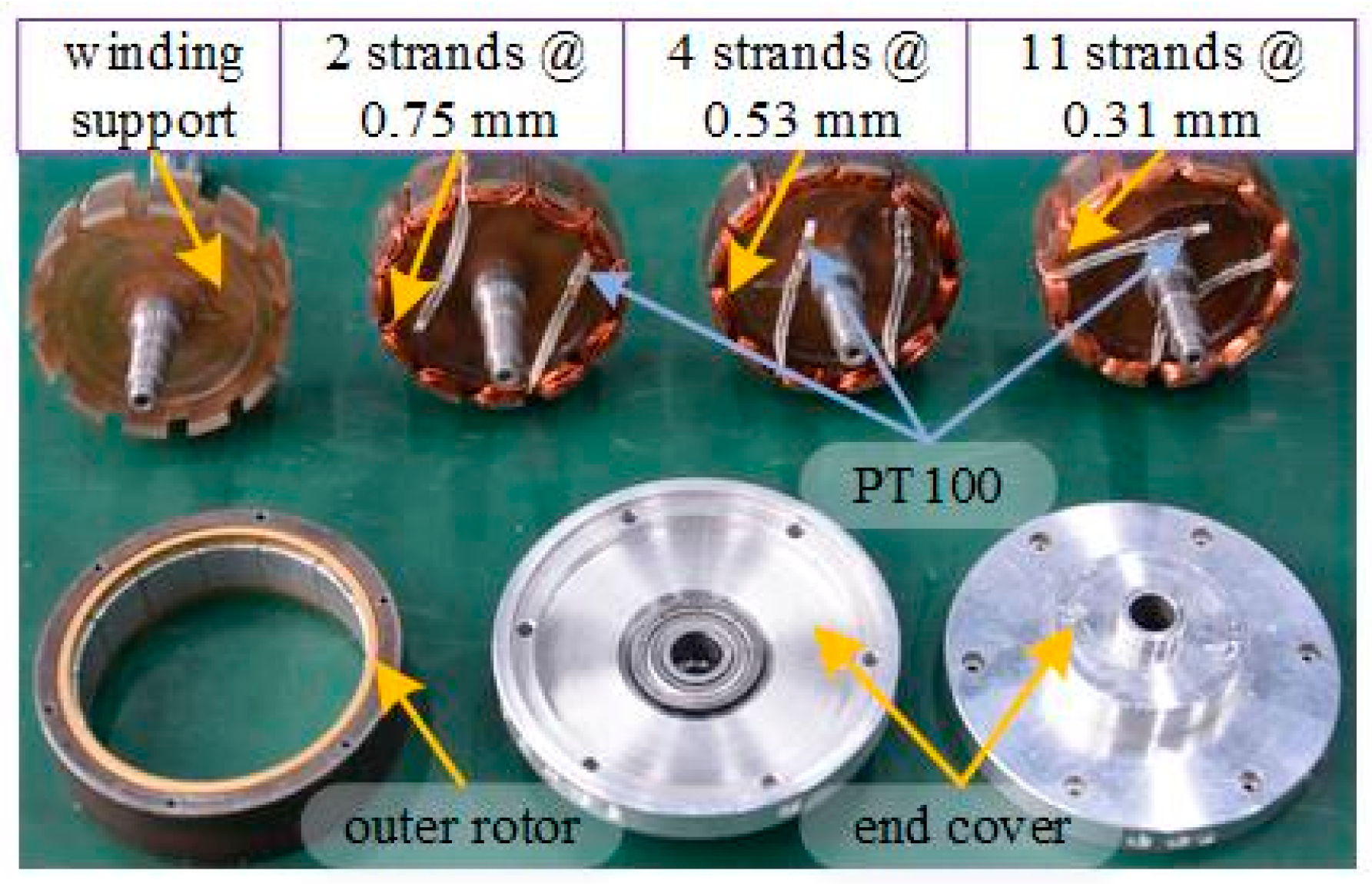
4. Experimental Testing
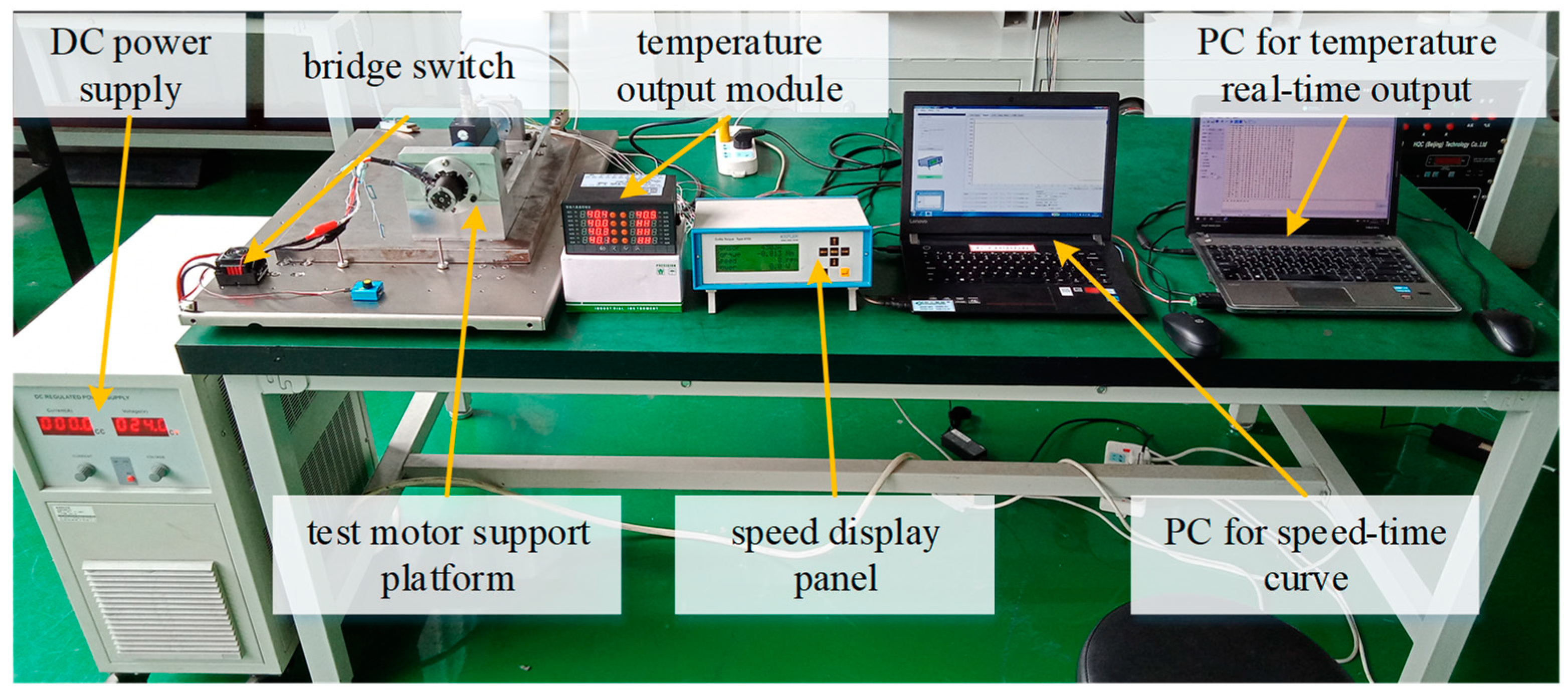
4.1. Experiment for Measuring Winding Eddy Current Loss
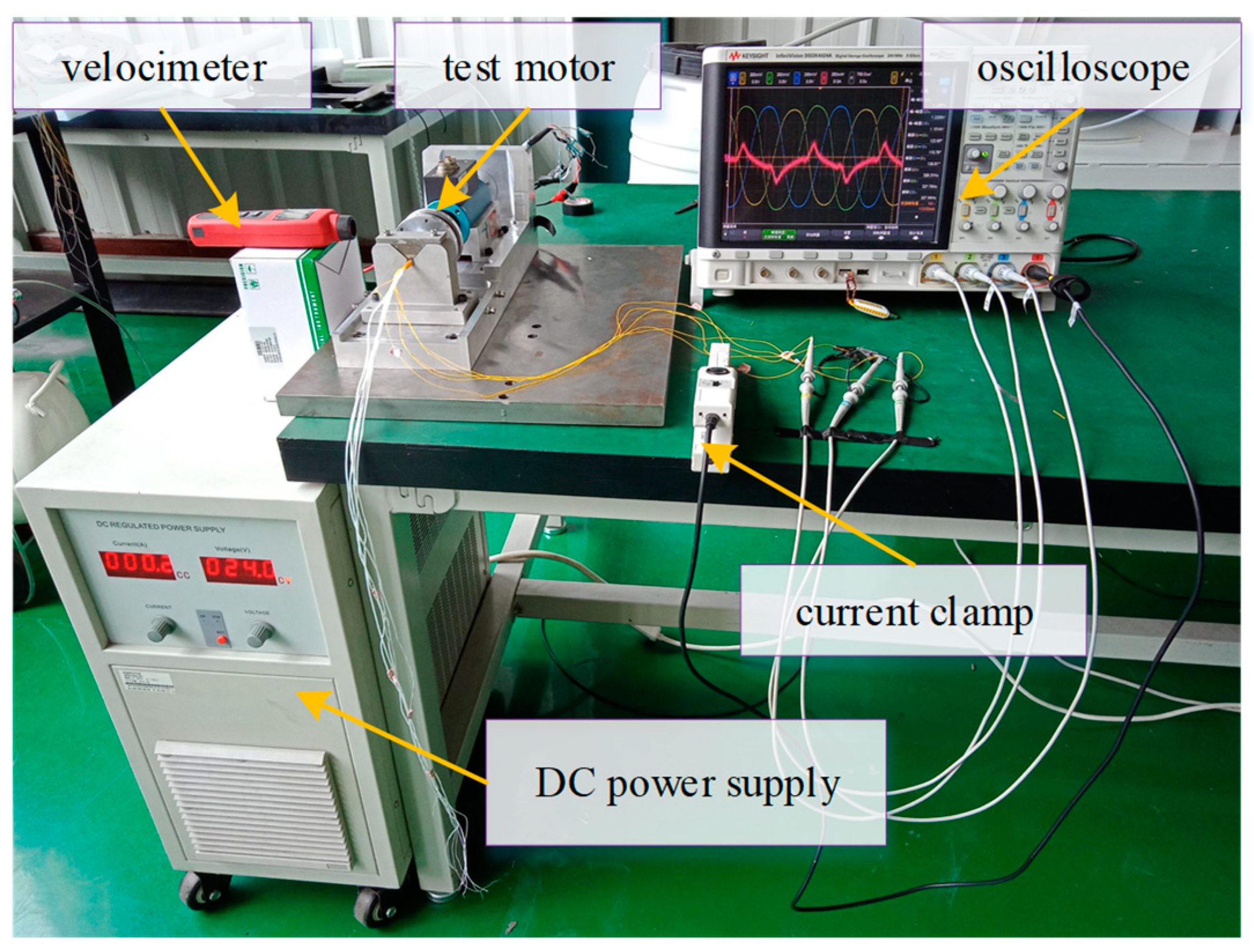
4.2. Measurement of Circulating Strand Currents
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, X.X.; Chen, X.; Zeng, F.Q.; Tang, J.Q. Fast commutation instant shift correction method for sensorless coreless BLDC motor based on terminal voltage information. IEEE Trans. Power Electron. 2017, 32, 9460–9472. [Google Scholar] [CrossRef]
- Bolam, R.C.; Vagapov, Y.; Anuchin, A. Performance comparison between copper and aluminium windings in a rim driven fan for a small unmanned aircraft application. In Proceedings of the 2020 XI International Conference on Electrical Power Drive Systems (ICEPDS), St. Petersburg, Russia, 4–7 October 2020. [Google Scholar]
- Zhang, Z.M.; Deng, Z.Q.; Gu, C.; Sun, Q.G.; Peng, C.; Pang, G.C. Reduction of rotor harmonic eddy-current loss of high-speed PM BLDC motors by using a split-phase winding method. IEEE Trans. Energy Convers. 2019, 34, 1593–1602. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Z.; Wang, C.; Geng, W.; Yang, T. Design and analysis of oil-immersed cooling stator with nonoverlapping concentrated winding for high-power ironless stator axial-flux permanent magnet machines. IEEE Trans. Ind. Electron. 2021, 68, 2876–2886. [Google Scholar] [CrossRef]
- Damiano, A.; Floris, A.; Fois, G.; Marongiu, I.; Porru, M.; Serpi, A. Design of a high-speed ferrite-based brushless DC machine for electric vehicles. IEEE Trans. Ind. Electron. 2017, 53, 4279–4287. [Google Scholar] [CrossRef] [Green Version]
- Burnand, G.; Thabuis, A.; Araujo, D.M.; Perriard, Y. Novel optimized shape and topology for slotless windings in BLDC machines. IEEE Trans. Ind. Appl. 2020, 56, 1275–1283. [Google Scholar] [CrossRef]
- Praveen, R.P.; Ravichandran, M.H.; Achari, V.T.S.; Raj, V.P.J.; Madhu, G.; Bindu, G.R. A novel slotless Halbach-array permanent-magnet brushless DC motor for spacecraft applications. IEEE Trans. Ind. Electron. 2012, 59, 3553–3560. [Google Scholar] [CrossRef]
- Huang, Y.K.; Ge, B.Y.; Dong, J.N.; Lin, H.Y.; Zhu, J.G.; Guo, Y.G. 3-D analytical modeling of no-load magnetic field of ironless axial flux permanent magnet machine. IEEE Trans. Magn. 2012, 48, 2929–2932. [Google Scholar] [CrossRef]
- Geng, W.W.; Zhang, Z.R. Investigation of a new ironless-stator self-bearing axial flux permanent magnet moto. IEEE Trans. Magn. 2016, 52, 8105104. [Google Scholar] [CrossRef]
- Liu, K.; Fu, X.H.; Lin, M.Y.; Tai, L.C. AC copper losses analysis of the ironless brushless DC motor used in a flywheel energy storage system. IEEE Trans. Appl. Suppercond. 2016, 26, 0611105. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, J.; Liu, X.D.; Haddad, A.; Liang, J.; Hu, H.Z. Comparative study of three different radial flux ironless BLDC motors. IEEE Access 2018, 6, 64970–64980. [Google Scholar] [CrossRef]
- Liu, K.; Yin, M.; Hua, W.; Ma, Z.Q.; Lin, M.Y.; Kong, Y. Design and analysis of Halbach ironless flywheel BLDC motor/generators. IEEE Trans. Magn. 2018, 54, 8109305. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, J.; Liu, X.D.; Haddad, A.; Liang, J.; Hu, H.Z. Effects of Manufacturing Imperfections on the Circulating Current in Ironless Brushless DC Motor. IEEE Trans. Ind. Electron. 2019, 66, 338–348. [Google Scholar] [CrossRef]
- Wang, D.M.; Liang, Y.P.; Gao, L.L.; Bian, X.; Wang, C.G. A new global transposition method of stator winding and its loss calculation in AC machines. IEEE Trans. Energy Conver. 2020, 35, 149–156. [Google Scholar] [CrossRef]
- Artetxe, G.; Caballero, B.P.D.; Elosegui, I.; Martinez Maza, G. A practical approach for estimating bundle-level proximity losses in AC machines. IEEE Trans. Ind. Electron. 2021, 69, 12173–12181. [Google Scholar] [CrossRef]
- Fatemi, A.; Ionel, D.M.; Demerdash, N.A.O.; Staton, D.A.; Wrobel, R.; Chong, Y.C. Computationally efficient strand eddy current loss calculation in electric machines. IEEE Trans. Ind. Appl. 2019, 55, 3479–3489. [Google Scholar] [CrossRef] [Green Version]
- Neethu, S.; Nikam, S.P.; Singh, S.; Pal, S.; Wankhede, A.K.; Fernandes, B.G. High-speed coreless axial-flux permanent-magnet motor with printed circuit board winding. IEEE Trans. Ind. Appl. 2019, 55, 1954–1962. [Google Scholar]
- Xiao, T.Z.; Li, J.; Yang, K.; Lai, J.Q.; Lu, Y. Study on AC copper losses in an air-cored axial flux permanent magnet electrical machine with flat wires. IEEE Trans. Ind. Electron. 2022, 69, 13255–13264. [Google Scholar] [CrossRef]
- Simpson, N.; North, D.J.; Collins, S.M.; Mellor, P.H. Additive manufacturing of shaped profile windings for minimal AC loss in electrical machines. IEEE Trans. Ind. Appl. 2020, 56, 2510–2519. [Google Scholar] [CrossRef] [Green Version]
- Taran, N.; Ionel, D.M.; Rallabandi, V.; Heins, G.; Patterson, D. An overview of methods and a new three-dimensional FEA and analytical hybrid technique for calculating AC winding losses in PM Machines. IEEE Trans. Ind. Appl. 2021, 57, 352–362. [Google Scholar] [CrossRef]
- Fang, J.C.; Liu, X.Q.; Han, B.C.; Wang, K. Analysis of circulating current loss for high-speed permanent magnet motor. IEEE Trans. Magn. 2015, 51, 8200113. [Google Scholar]
- Umetani, K.; Kawahara, S.; Acero, J.; Sarnago, H.; Lucía, Ó.; Hiraki, E. Analytical formulation of copper loss of Litz wire with multiple levels of twisting using measurable parameters. IEEE Trans. Ind. Appl. 2021, 57, 3. [Google Scholar] [CrossRef]
- Fujita, M.; Kabata, Y.; Tokumasu, T.; Nagakura, K.; Kakiuchi, M.; Nagano, S. Circulating currents in stator coils of large turbine generators and loss reduction. IEEE Trans. Ind. Appl. 2009, 45, 685–693. [Google Scholar] [CrossRef]
- Bardalai, A.; Gerada, D.; Golovanov, D.; Xu, Z.Y.; Zhang, X.C.; Li, J.; Zhang, H.; Gerada, C. Reduction of winding AC losses by accurate conductor placement in high frequency electrical machines. IEEE Trans. Ind. Appl. 2020, 56, 183–193. [Google Scholar] [CrossRef]
- Yamazaki, K.; Furuhashi, T.; Yui, H.; Ohguchi, H.; Imamori, S.; Shuto, M. Analysis and reduction of circulating current loss of armature wires in permanent magnet synchronous machines. IEEE Trans. Ind. Appl. 2019, 55, 5888–5896. [Google Scholar] [CrossRef]
- Geng, W.W.; Zhang, Z.R. Analysis and implementation of new ironless stator axial-flux permanent magnet machine with concentrated nonoverlapping windings. IEEE Trans. Energy Conver. 2018, 33, 1274–1284. [Google Scholar] [CrossRef]
- Liu, X.D.; Hu, H.Z.; Zhao, J.; Belahcen, A.; Tang, L.; Yang, L. Analytical solution of the magnetic field and EMF calculation in ironless BLDC motor. IEEE Trans. Magn. 2016, 52, 8100510. [Google Scholar] [CrossRef]
- Zhang, C.Q.; Gao, S.B.; Zhou, L.J.; Jiang, J.F.; Cai, J.Y. Novel Analytical Formulas for Eddy-Current Losses in Semicircle-Section Wound Core of Transformer. IEEE Trans. Magn. 2019, 55, 6300612. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Type I | Type II | Type III |
|---|---|---|---|
| Inner radius of outer PM, R1 (mm) | 25 | 25 | 25 |
| Pole pairs, p | 7 | 7 | 7 |
| Outer radius of outer PM, Ro (mm) | 28 | 28 | 28 |
| Outer radius of inner PM, R2 (mm) | - | - | 20 |
| Outer radius of Back-iron, Ri (mm) | - | 20 | 18 |
| Relative permeability of the PMs, μr | 1.043 | 1.043 | 1.043 |
| Residual flux density of the PMs, Br (T) | 1.28 | 1.28 | 1.28 |
| Effective axial length of the motor, Lef (mm) | 12 | 12 | 12 |
| Rated power (W) | 6 | 6 | 6 |
| Rated phase current (A) | 1 | 1 | 1 |
| Speed (rpm) | 3000 | 6000 | 9000 | 12,000 | 15,000 | |
|---|---|---|---|---|---|---|
| Current (mA) | ||||||
| Two strands @ 0.75 mm | 110.70 | 204.90 | 324.06 | 402.76 | 498.86 | |
| Four strands @ 0.53 mm | A1 | 4.66 | 5.87 | 5.22 | 5.49 | 5.92 |
| A2 | 2.68 | 4.75 | 4.19 | 5.53 | 6.51 | |
| A3 | 2.87 | 4.68 | 4.74 | 5.46 | 6.57 | |
| A4 | 5.08 | 5.96 | 5.76 | 5.86 | 7.79 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Zhao, J.; Fu, W.; Liu, X.; Zhu, J.; Ai, C. A Comprehensive Investigation of Winding Eddy and Circulating Current Losses of Stator Iron Coreless PMBLDC Motors. Energies 2023, 16, 5523. https://doi.org/10.3390/en16145523
Yang L, Zhao J, Fu W, Liu X, Zhu J, Ai C. A Comprehensive Investigation of Winding Eddy and Circulating Current Losses of Stator Iron Coreless PMBLDC Motors. Energies. 2023; 16(14):5523. https://doi.org/10.3390/en16145523
Chicago/Turabian StyleYang, Liu, Jing Zhao, Wenqi Fu, Xiangdong Liu, Jianguo Zhu, and Chao Ai. 2023. "A Comprehensive Investigation of Winding Eddy and Circulating Current Losses of Stator Iron Coreless PMBLDC Motors" Energies 16, no. 14: 5523. https://doi.org/10.3390/en16145523