


Alternative Surface-Mounted Permanent Magnet Topology for Reducing Voltage and Torque Harmonics in Shaft Generators

Abstract
:1. Introduction
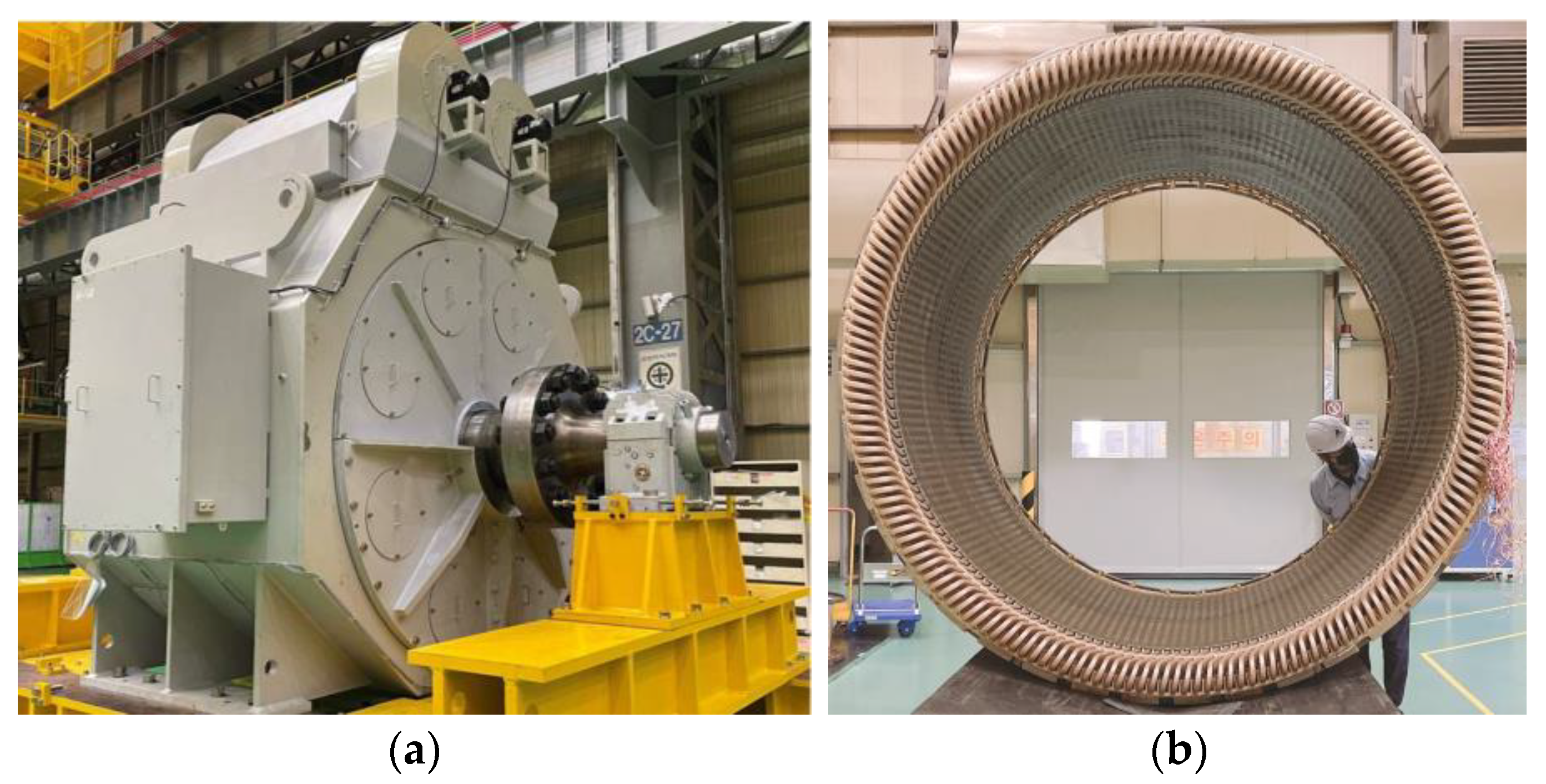
2. Interior Permanent Magnet Prototype Machine
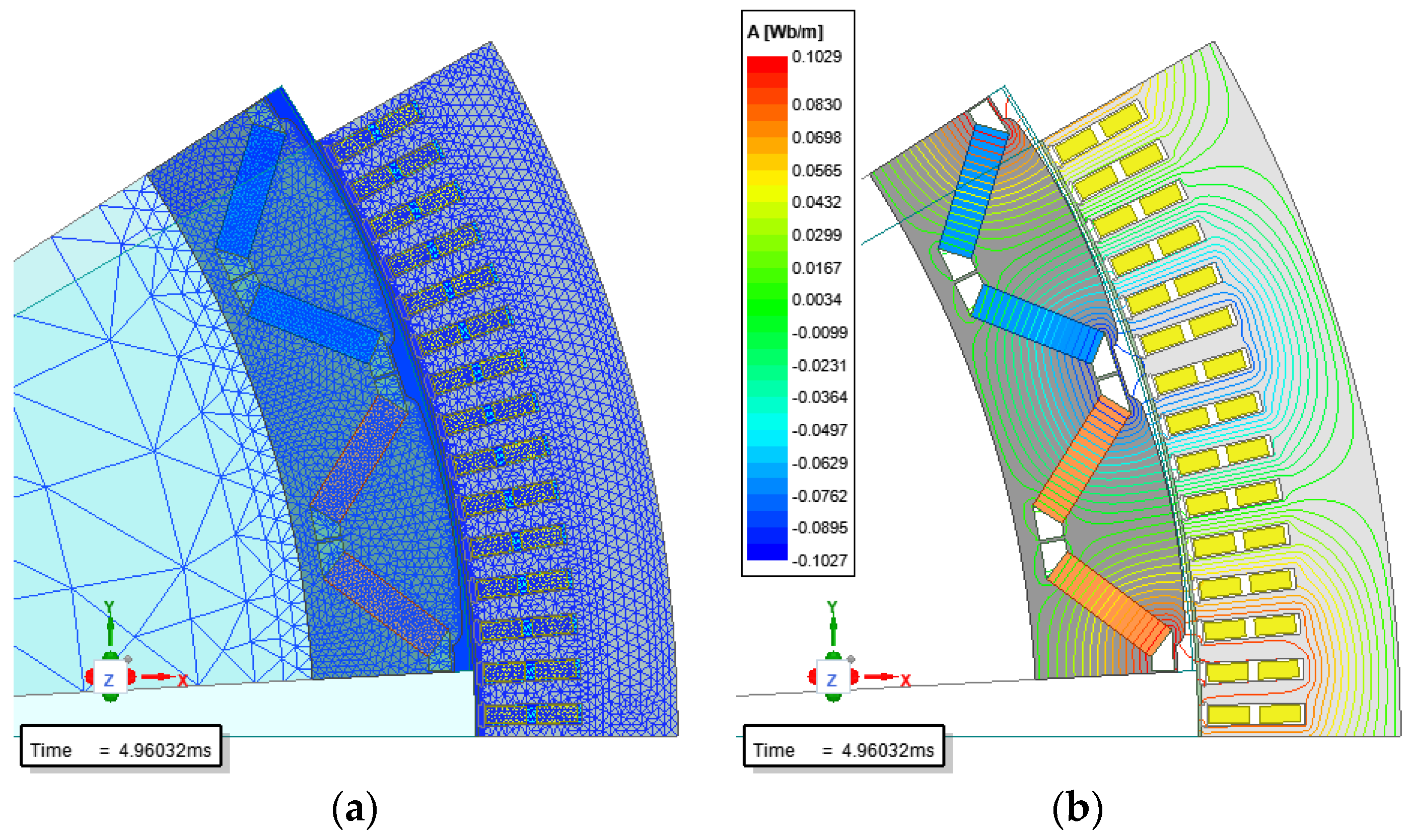
2.1. 2-D Finite Element Model and Analysis Condition
2.2. No-Load Test Result
3. Proposed Surface Permanent Magnet Topology
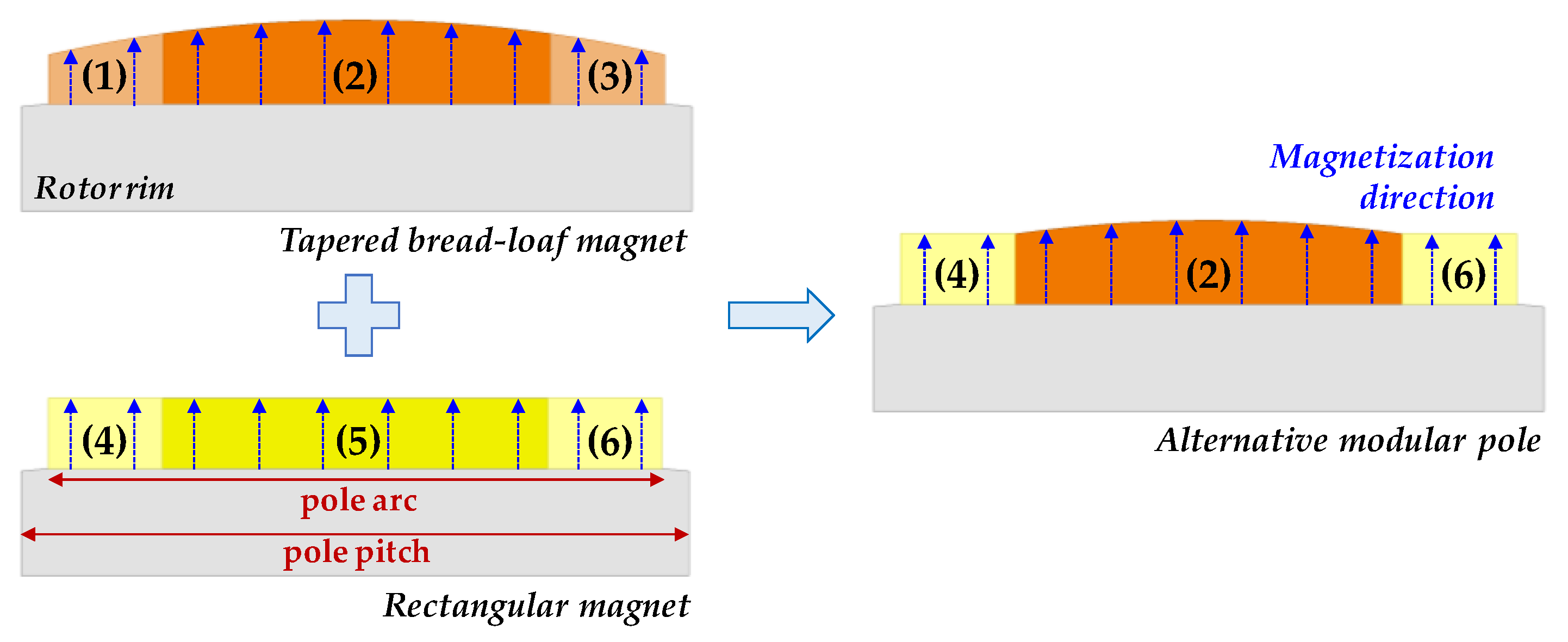
3.1. Design Approach in Radial Direction with Modular Pole
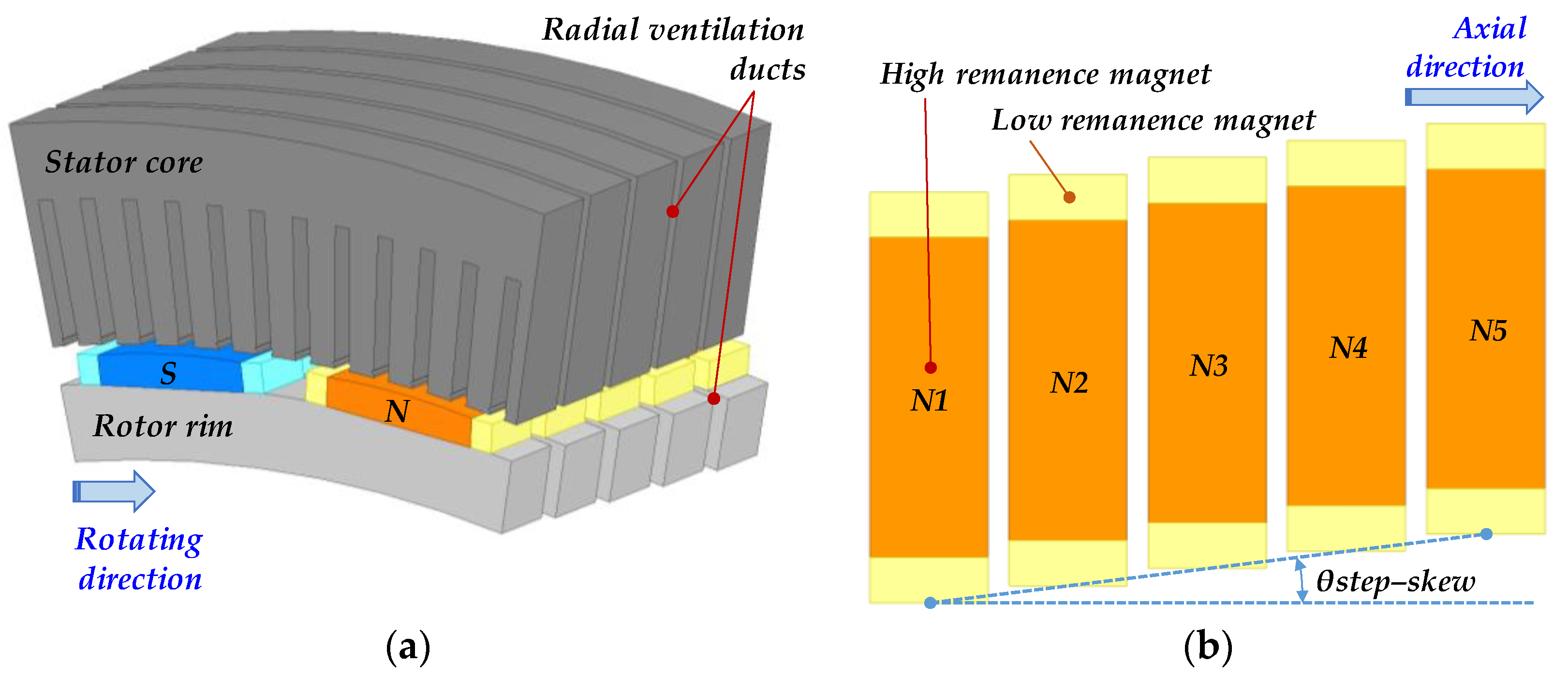
3.2. Design Approach in Axial Direction with Step-Skewed Rotor
4. Characteristic Comparison of Voltage and Torque
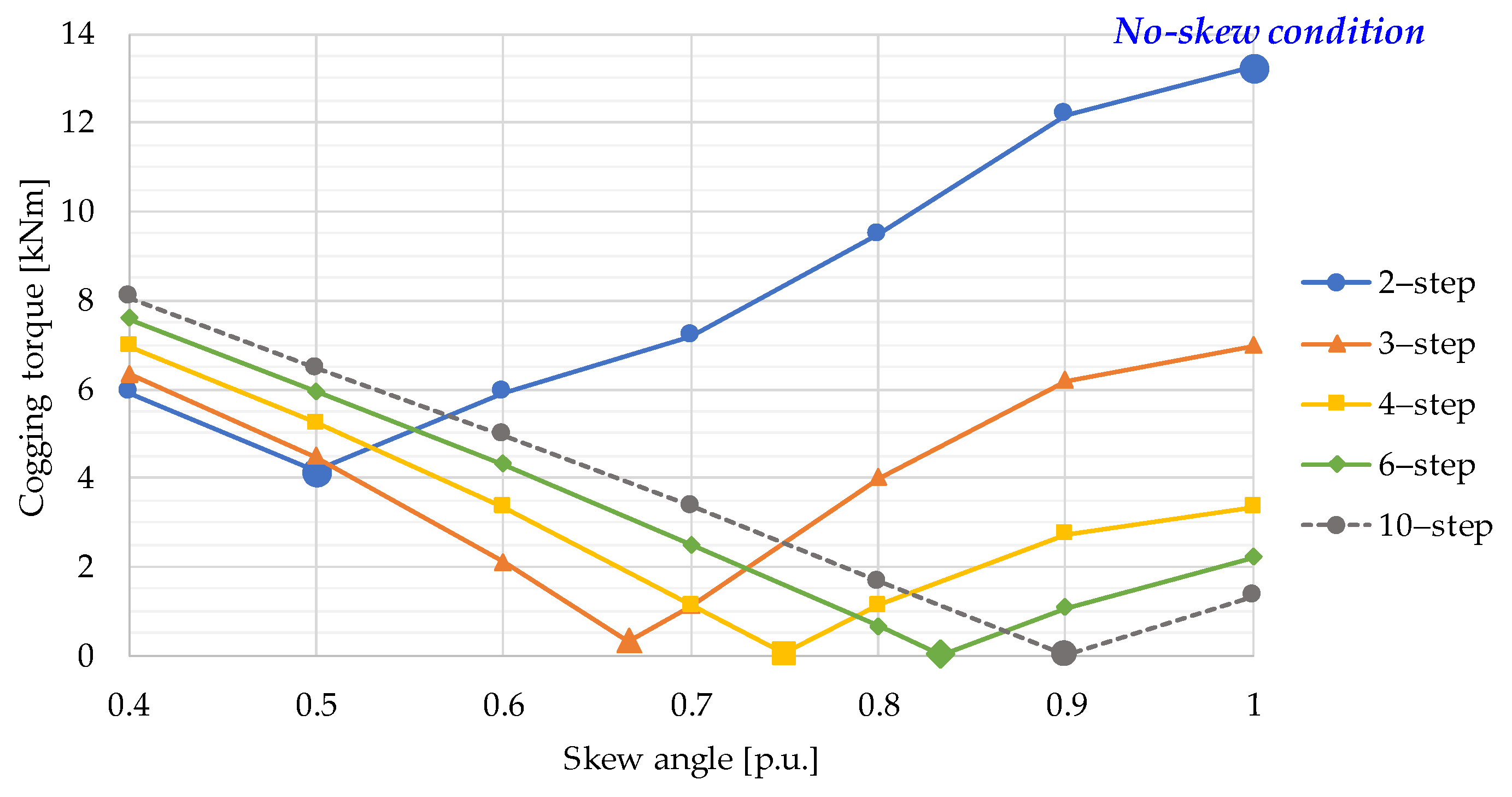
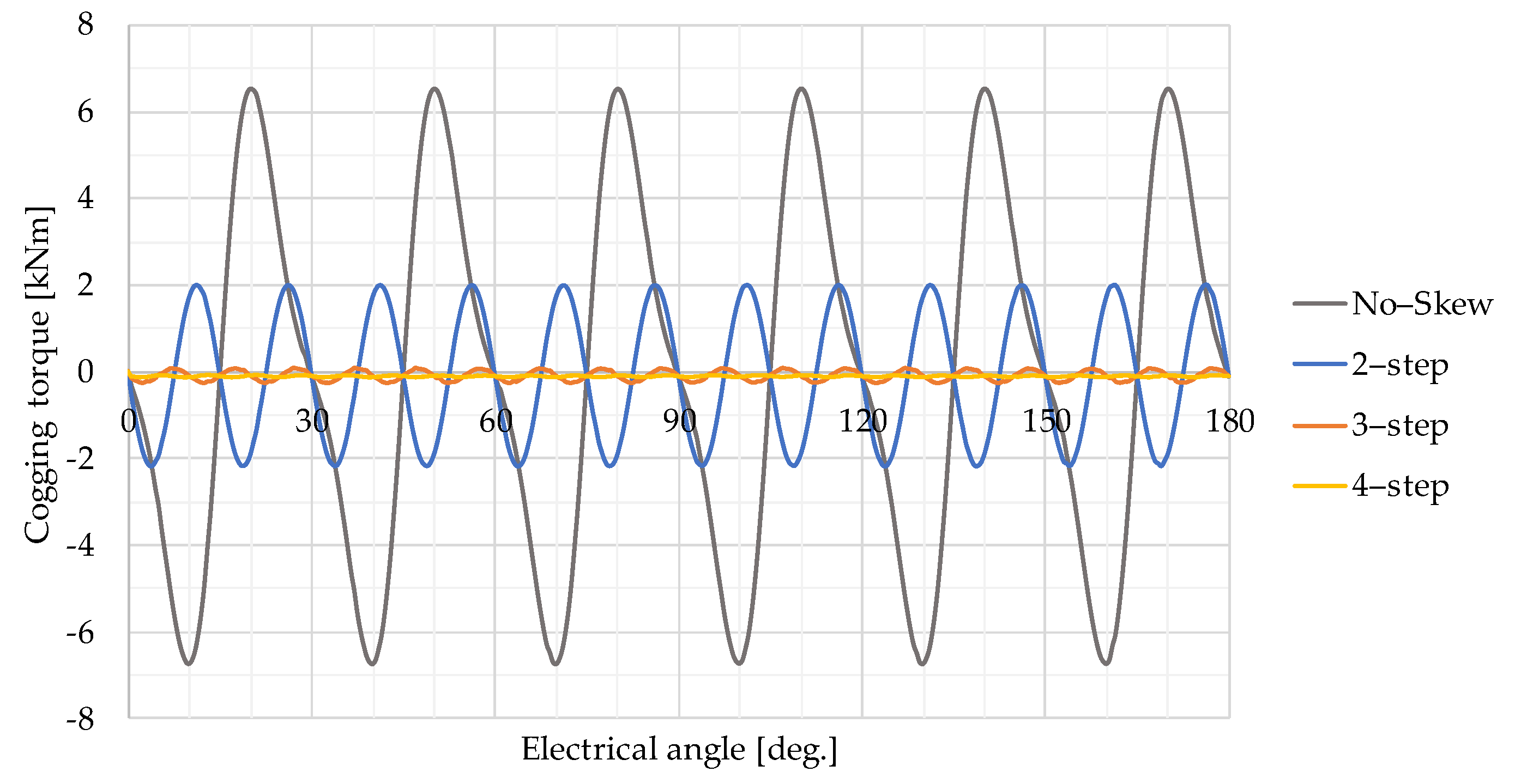
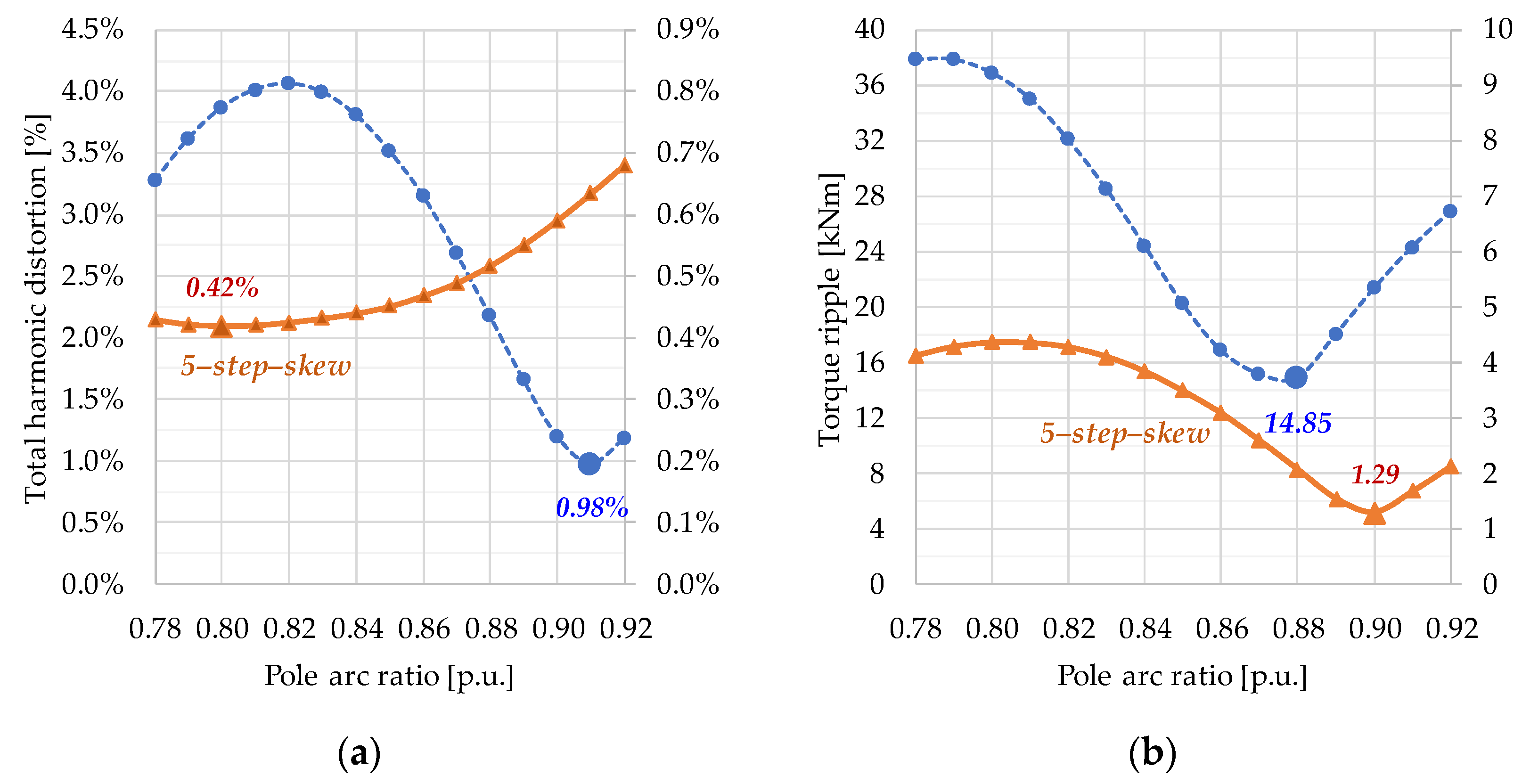
4.1. Cogging Torque Minimization with Step-Skew
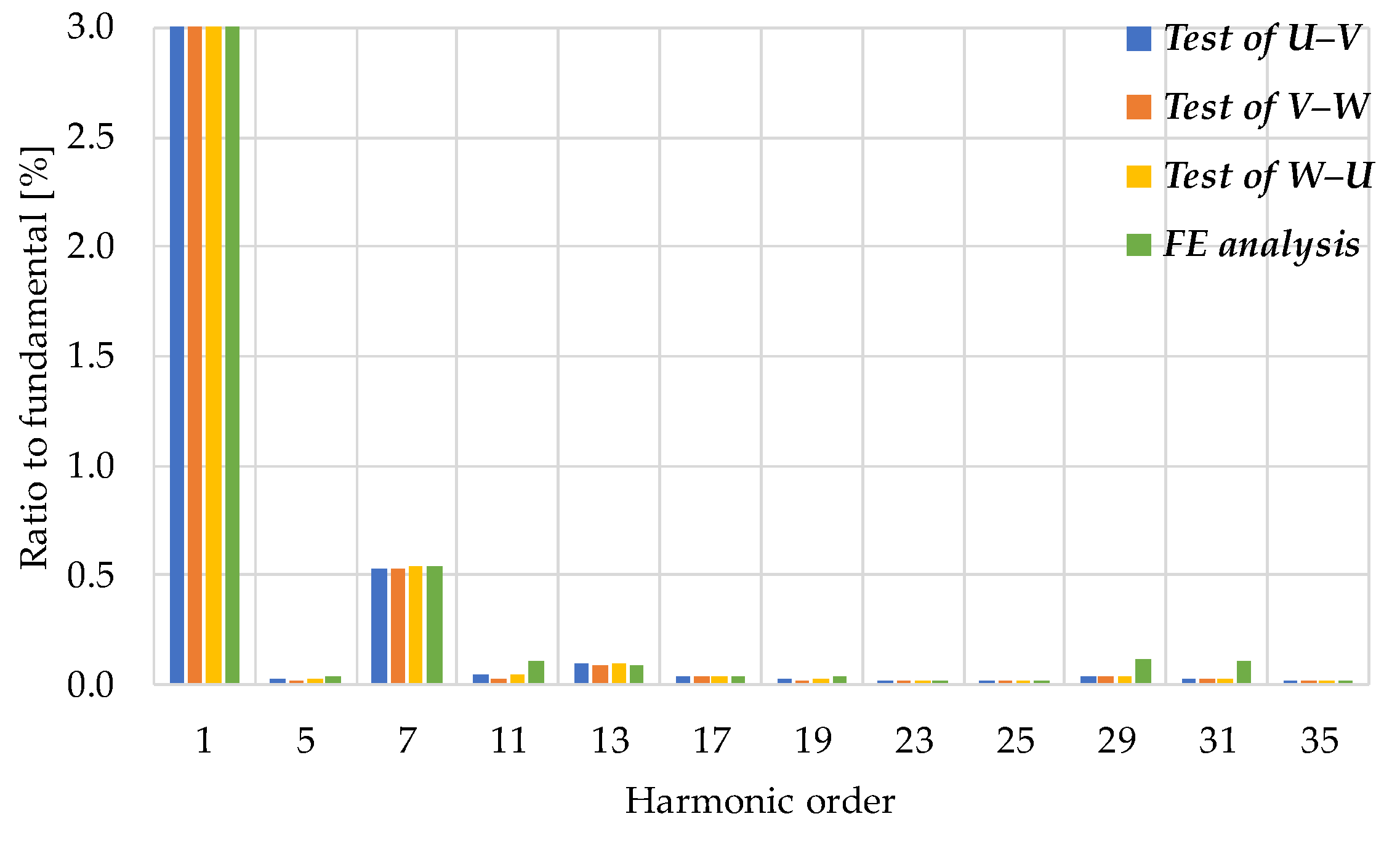
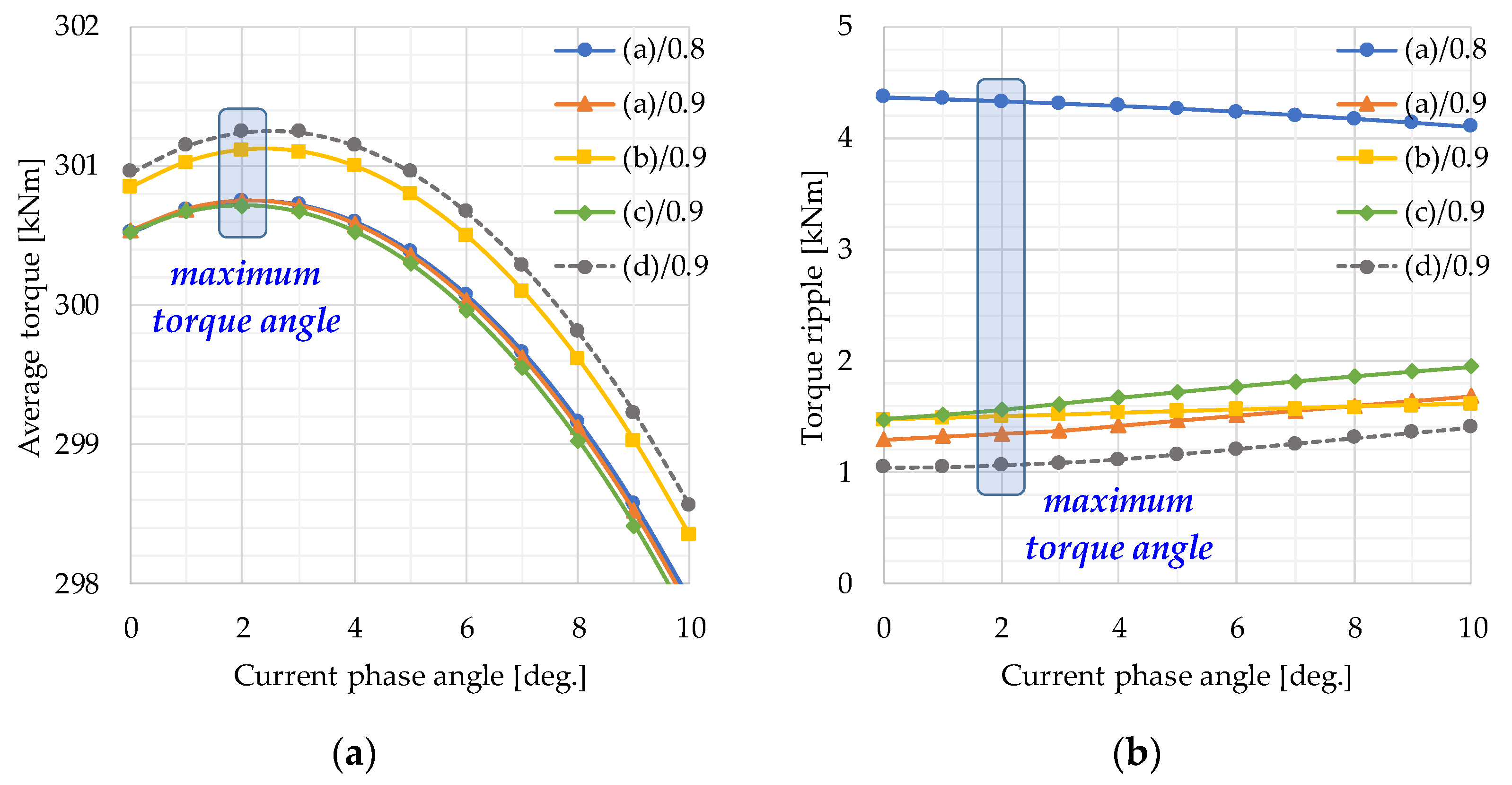
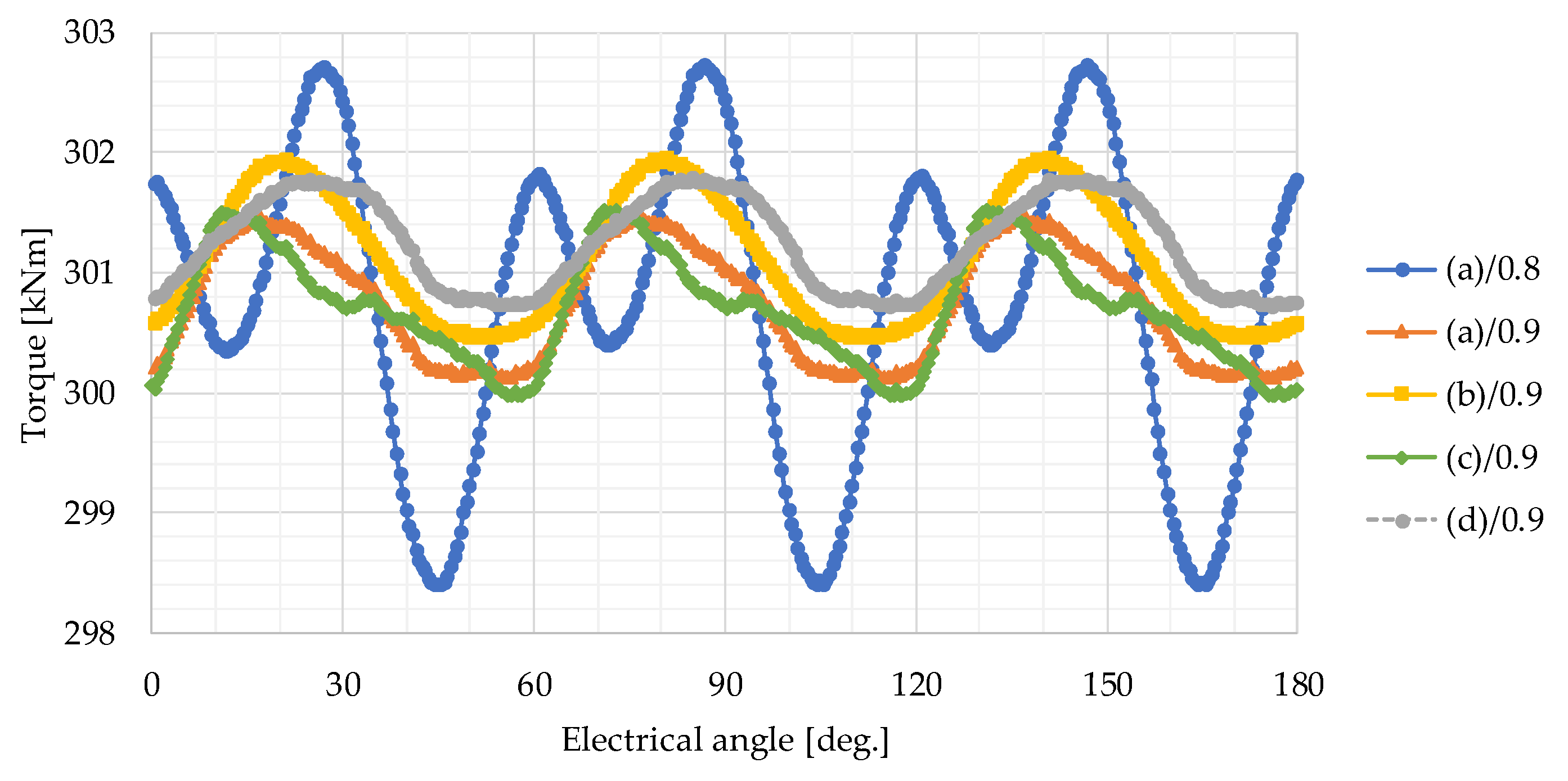
4.2. Harmonic Characteristics of Voltage and Torque Ripple
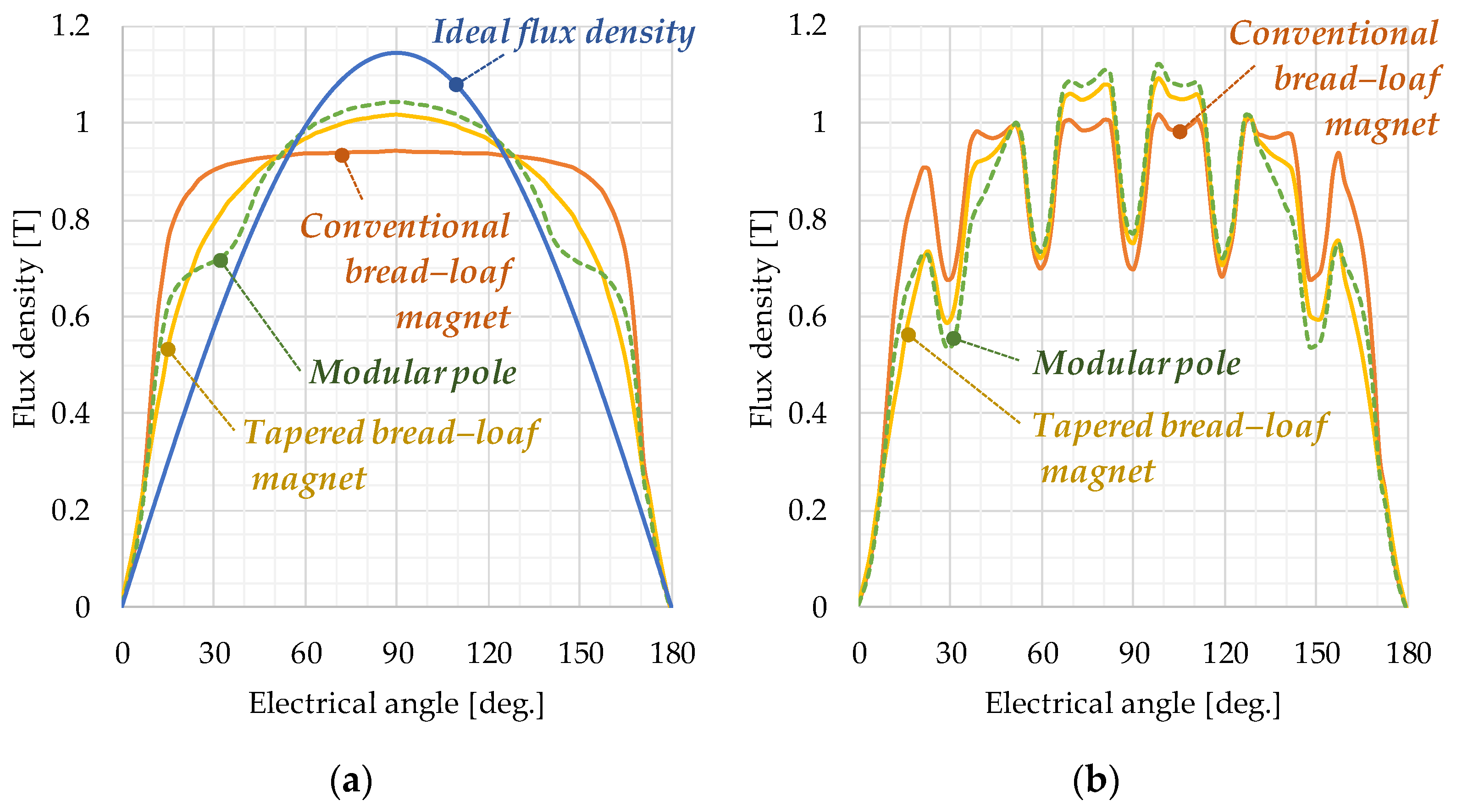
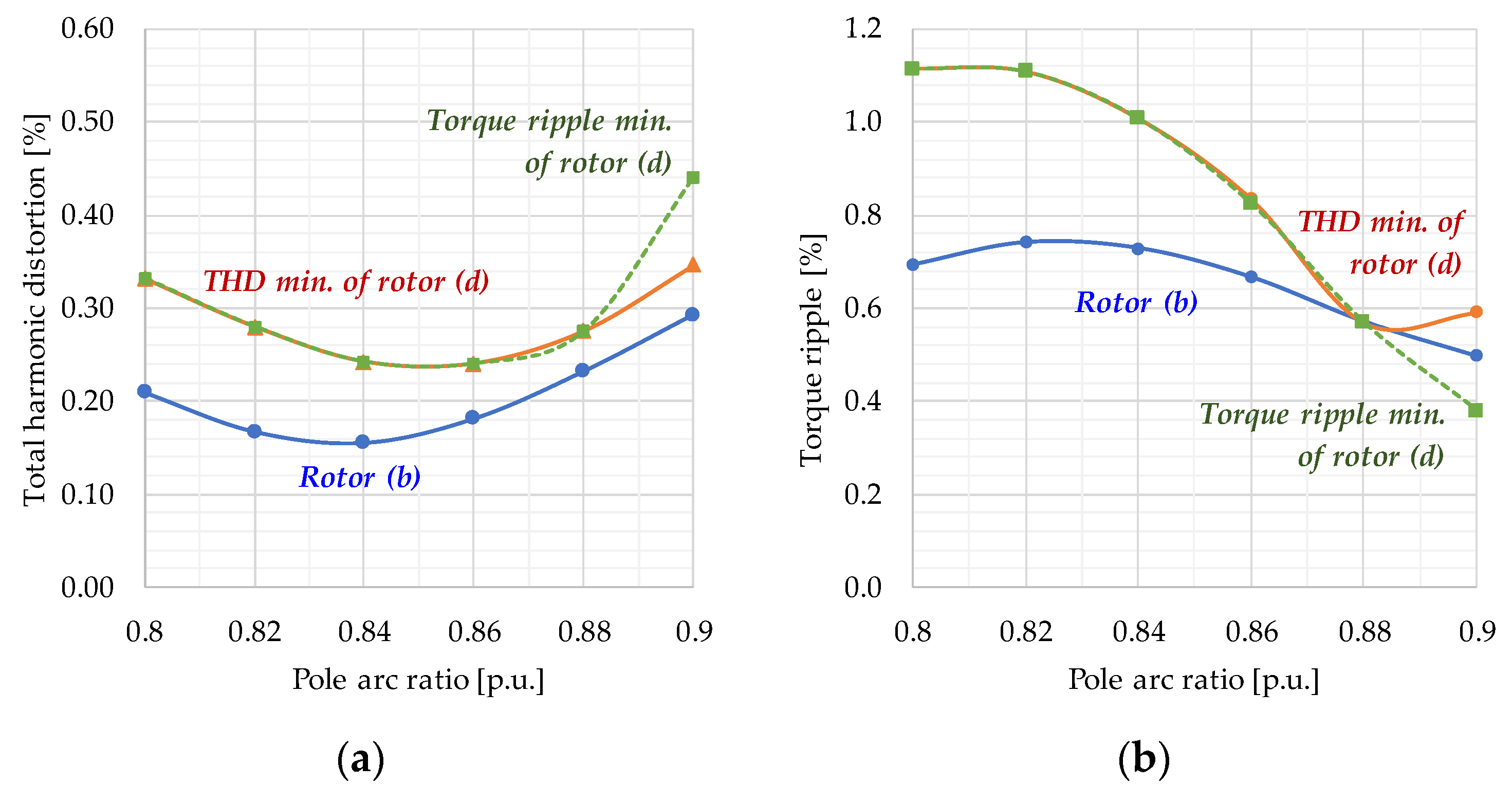
4.3. Characteristic Comparison of Four Different Magnet Rotors
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Halbach, K. Design of permanent multipole magnets with oriented rare earth cobalt material. Nucl. Instr. Meth. 1980, 169, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Marinescu, M.; Marinescu, N. New concept of permanent magnet excitation for electrical machines. Analytical and numerical computation. IEEE Trans. Magn. 1992, 28, 1390–1393. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Halbach permanent magnet machines and applications: A review. IEE Proc. Elect. Power Appl. 2001, 148, 299–308. [Google Scholar] [CrossRef]
- Jeon, W.J.; Watanabe, H.; Nakamoto, A.; Kamiya, Y.; Onuki, T. Dynamic characteristics of synchronous motors applying a plural sub-magnets scheme to the rotor. IEEE Trans. Magn. 1999, 35, 3574–3576. [Google Scholar] [CrossRef]
- Lateb, R.; Takorabet, N.; Meibody-Tabar, F. Effect of magnet segmentation on the cogging torque in surface-mounted permanent-magnet motors. IEEE Trans. Magn. 2006, 42, 442–445. [Google Scholar] [CrossRef]
- Chaithongsuk, S.; Takorabet, N.; Meibody-Tabar, F. On the use of pulse width modulation method for the elimination of flux density harmonics in the air-gap of surface PM motors. IEEE Trans. Magn. 2009, 45, 1736–1739. [Google Scholar] [CrossRef]
- Isfahani, A.H. Analytical framework for thrust enhancement in permanent-magnet (PM) linear synchronous motors with segmented PM poles. IEEE Trans. Magn. 2010, 46, 1116–1122. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.I. Multiobjective Shape optimization of segmented pole permanent-magnet synchronous machines with improved torque characteristics. IEEE Trans. Magn. 2011, 47, 795–804. [Google Scholar] [CrossRef]
- Hwang, S.M.; Eom, J.B.; Jung, Y.H.; Lee, D.W.; Kang, B.S. Various design techniques to reduce cogging torque by controlling energy variation in permanent magnet motors. IEEE Trans. Magn. 2001, 37, 2806–2809. [Google Scholar] [CrossRef]
- Dubois, M.R.; Polinder, H.; Ferreira, J.A. Magnet shaping for minimal magnet volume in machines. IEEE Trans. Magn. 2002, 38, 2985–2987. [Google Scholar] [CrossRef]
- Dubois, M.R.; Polinder, H.; Ferreira, J.A. Contribution of permanent-magnet volume elements to no-load voltage in machines. IEEE Trans. Magn. 2003, 39, 1784–1792. [Google Scholar] [CrossRef]
- Li, Y.; Zou, J.; Lu, Y. Optimum design of magnet shape in permanent-magnet synchronous motors. IEEE Trans. Magn. 2003, 39, 3523–3526. [Google Scholar] [CrossRef]
- Hsieh, M.F.; Hsu, Y.S. An investigation on influence of magnet arc shaping upon back electromotive force waveforms for design of permanent-magnet brushless motors. IEEE Trans. Magn. 2005, 41, 3949–3951. [Google Scholar] [CrossRef]
- Zheng, P.; Jing, Z.; Jianqun, H.; Jie, W.; Zhiyuan, Y.; Ranran, L. Optimization of the magnetic pole shape of a permanent-magnet synchronous motor. IEEE Trans. Magn. 2007, 43, 2531–2533. [Google Scholar] [CrossRef]
- Li, Y.; Xing, J.; Wang, T.; Lu, Y. Programmable design of magnet shape for permanent-magnet synchronous motors with sinusoidal back EMF waveforms. IEEE Trans. Magn. 2008, 44, 2163–2167. [Google Scholar] [CrossRef]
- Tavana, N.R.; Shoulaie, A. Analysis and design of magnetic pole shape in linear permanent-magnet machine. IEEE Trans. Magn. 2010, 46, 1000–1006. [Google Scholar] [CrossRef]
- Laskaris, K.I.; Kladas, A.G. Permanent-magnet shape optimization effects on synchronous motor performance. IEEE Trans. Ind. Elect. 2011, 58, 3776–3783. [Google Scholar] [CrossRef]
- Hong, H.S.; Yoo, J.H. Shape design of the surface mounted permanent magnet in a synchronous machine. IEEE Trans. Magn. 2011, 47, 2109–2117. [Google Scholar] [CrossRef]
- Pang, Y.; Zhu, Z.Q.; Feng, Z.J. Cogging torque in cost-effective surface-mounted permanent-magnet machines. IEEE Trans. Magn. 2011, 47, 2269–2276. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wang, K.; Ombach, G. Optimal magnet shaping with third order harmonic for maximum torque in brushless AC machines. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, K.; Gu, Z.Y.; Zhu, Z.Q.; Wu, Z.Z. Optimum injected harmonics into magnet shape in multiphase surface-mounted PM machine for maximum output torque. IEEE Trans. Ind. Elect. 2017, 64, 4434–4443. [Google Scholar] [CrossRef]
- Li, T.; Slemon, G.R. Reduction of cogging torque in permanent magnet motors. IEEE Trans. Magn. 1988, 24, 2901–2903. [Google Scholar] [CrossRef]
- Ishikawa, T.; Slemon, G.R. A method of reducing ripple torque in permanent magnet motors without skewing. IEEE Trans. Magn. 1993, 29, 2028–2031. [Google Scholar] [CrossRef]
- Borghi, C.A.; Casadei, D.; Fabbri, M.; Serra, G. Reduction of the torque ripple in permanent magnet actuators by a multi-objective minimization technique. IEEE Trans. Magn. 1998, 34, 2869–2872. [Google Scholar] [CrossRef]
- Borghi, C.A.; Casadei, D.; Cristofolini, A.; Fabbri, M.; Serra, G. Application of a multiobjective minimization technique for reducing the torque ripple in permanent-magnet motors. IEEE Trans. Magn. 1999, 35, 4238–4246. [Google Scholar] [CrossRef]
- Breton, C.; Bartolome, J.; Benito, J.A.; Tassinario, G.; Flotats, I.; Lu, C.W.; Chalmers, B.J. Influence of machine symmetry on reduction of cogging torque in permanent-magnet brushless motors. IEEE Trans. Magn. 2000, 36, 3819–3823. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Dosiek, L.; Pillay, P. Cogging torque reduction in permanent magnet machines. IEEE Trans. Ind. Appl. 2007, 43, 1565–1571. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Wang, X.; Yang, Y.; Zhang, R. Optimization of magnetic pole shifting to reduce cogging torque in solid-rotor permanent-magnet synchronous motors. IEEE Trans. Magn. 2010, 46, 1228–1234. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Kim, M.K.; Jung, S.Y. Integrated optimization of two design techniques for cogging torque reduction combined with analytical method by a simple gradient descent method. IEEE Trans. Magn. 2012, 48, 2265–2276. [Google Scholar] [CrossRef]
- Tudorache, T.; Trifu, I. Permanent-magnet synchronous machine cogging torque reduction using a hybrid model. IEEE Trans. Magn. 2012, 48, 2627–2632. [Google Scholar] [CrossRef]
- Ree, J.D.L.; Boules, N. Magnet shaping to reduce induced voltage harmonics in PM machines with surface mounted magnets. IEEE Trans. Energy Convers. 1991, 6, 155–161. [Google Scholar] [CrossRef]
- Dubois, M.R.; Mailloux, G. Analytical calculation of no-load voltage waveforms in machines based on permanent-magnet volume integration. IEEE Trans. Magn. 2008, 44, 581–589. [Google Scholar] [CrossRef]
- Isfahani, A.H.; Vaez-Zadeh, S.; Rahman, M.A. Using modular poles for shape optimization of flux density distribution in permanent-magnet machines. IEEE Trans. Magn. 2008, 44, 2009–2015. [Google Scholar] [CrossRef]
- Isfahani, A.H.; Vaez-Zadeh, S.; Rahman, M.A. Performance improvement of permanent magnet machines by modular poles. IET Elect. Pow. Appl. 2009, 3, 343–351. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Shen, Y. Investigation of permanent magnet brushless machines having unequal-magnet height pole. IEEE Trans. Magn. 2012, 48, 4815–4830. [Google Scholar] [CrossRef]
- Dubois, M.R.; Polinder, H.; Ferreira, J.A. Varying magnetization orientation for permanent-magnet volume reduction in machines. IEEE Trans. Magn. 2003, 39, 1793–1799. [Google Scholar] [CrossRef] [Green Version]
- Fei, W.; Luk, P.C. Torque ripple reduction of a direct-drive permanent-magnet synchronous machine by material-efficient axial pole pairing. IEEE Trans. Ind. Elect. 2012, 59, 2601–2611. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Lipo, T.A.; Kwon, B.I. Torque pulsation minimization in spoke-type interior permanent magnet motors with skewing and sinusoidal permanent magnet configurations. IEEE Trans. Magn. 2015, 51, 8110804. [Google Scholar] [CrossRef]
- Vaez-Zadeh, S.; Isfahani, A.H. Multiobjective design optimization of air-core linear permanent-magnet synchronous motors for improved thrust and low magnet consumption. IEEE Trans. Magn. 2006, 42, 446–452. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Zhang, R.; Ding, T.; Tang, R. The optimization of pole arc coefficient to reduce cogging torque in surface-mounted permanent magnet motors. IEEE Trans. Magn. 2006, 42, 1135–1138. [Google Scholar] [CrossRef]
- Jahns, T.M.; Soong, W.L. Pulsating torque minimization techniques for permanent magnet AC motor drives-a review. IEEE Trans. Ind. Elect. 1996, 43, 321–330. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef] [Green Version]
- Hwang, S.; Lieu, D.K. Design techniques for reduction of reluctance torque in brushless permanent magnet motors. IEEE Trans. Magn. 1994, 30, 4287–4289. [Google Scholar] [CrossRef]
- Hanselman, D.C. Effect of skew, pole count and slot count on brushless motor radial force, cogging torque and back EMF. IEEE Proc. Elect. Power Appl. 1997, 144, 325–330. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Ruangsinchaiwanich, S.; Ishak, D.; Howe, D. Analysis of cogging torque in brushless Machines having nonuniformly distributed stator slots and stepped rotor magnets. IEEE Trans. Magn. 2005, 41, 3910–3912. [Google Scholar] [CrossRef] [Green Version]
- Guemes, J.A.; Iraolagoitia, A.A.; DelHoyo, J.J.; Fernandez, P. Torque analysis in permanent-magnet synchronous motors: A comparative study. IEEE Trans. Energy Convers. 2011, 26, 55–63. [Google Scholar] [CrossRef]
- Jiang, J.W.; Bilgin, B.; Yang, Y.; Sathyan, A.; Dadkhah, H.; Emadi, A. Rotor skew pattern design and optimisation for cogging torque reduction. IET Elect. Syst. Transp. 2016, 6, 126–135. [Google Scholar] [CrossRef]
- Ocak, O.; Aydin, M. An innovative semi-FEA based, variable magnet-step-skew to minimize cogging torque and torque pulsations in permanent magnet synchronous motors. IEEE Access 2020, 8, 210775–210783. [Google Scholar] [CrossRef]
- Islam, M.S.; Shrestha, A.; Islam, M. Performance comparison of step skew in interior and surface-mount permanent magnet machines. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 3963–3968. [Google Scholar] [CrossRef]
- Nam, D.W.; Lee, K.B.; Pyo, H.J.; Jeong, M.J.; Yang, S.H.; Kim, W.H.; Jang, H.K. A study on core skew considering manufacturability of double-layer spoke-type PMSM. Energies 2021, 14, 610. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variable | Unit | Specifications |
|---|---|---|
| Rated power | kVA | 2100 |
| Rated speed | rpm | 65 |
| Number of phases | - | 3 |
| Number of poles | - | 32 |
| Number of slots | - | 192 |
| Stator outer diameter | mm | 2310 |
| Stator inner diameter | mm | 2000 |
| Minimum air-gap length | mm | 6 |
| Maximum magnet height | mm | 24 |
| Rotor rim height | mm | 50 |
| Core length except radial ducts | mm | 900 |
| Number of core packet | EA | 20 |
| Core material | - | 50PN400 |
| Skew angle | no. of slot | One slot pitch on rotor |
| Pole Arc Ratio | Maximum Air-Gap Length | Remanence of Center Magnet | Remanence of Edge Magnet | THD of Induced Voltage | Torque Ripple |
|---|---|---|---|---|---|
| p.u. | mm | T | T | % | % |
| 0.80 | 7 | 1.267 | 1.000 | 0.34 | 1.18 |
| 8 | 1.297 | 1.000 | 0.33 | 1.10 | |
| 9 | 1.326 | 1.000 | 0.35 | 1.16 | |
| 0.89 | 9 | 1.255 | 1.000 | 0.31 | 0.48 |
| 10 | 1.275 | 1.000 | 0.31 | 0.43 | |
| 11 | 1.294 | 1.000 | 0.34 | 0.42 | |
| 0.90 | 9 | 1.250 | 1.000 | 0.35 | 0.59 |
| 10 | 1.269 | 1.000 | 0.35 | 0.51 | |
| 11 | 1.287 | 1.000 | 0.37 | 0.41 | |
| 12 | 1.305 | 1.000 | 0.40 | 0.35 | |
| 13 | 1.322 | 1.000 | 0.43 | 0.36 |
| Rotor Topology | Pole Arc Ratio | Maximum Air-Gap Length | Remanence of Center Magnet | THD of Induced Voltage | Average Torque | Torque Ripple |
|---|---|---|---|---|---|---|
| p.u. | mm | T | % | kNm | % | |
| (a) conventional bread-loaf magnet | 0.90 | 6 | 1.189 | 0.59 | 300.5 | 0.43 |
| (b) tapered bread-loaf magnet | 0.90 | 12 | 1.273 | 0.29 | 300.8 | 0.49 |
| (c) rectangular magnet | 0.90 | 6 | 1.380 | 0.74 | 300.5 | 0.49 |
| (d) proposed modular pole | 0.89 | 10 | 1.275 | 0.31 | 300.8 | 0.43 |
| 0.90 | 12 | 1.305 | 0.40 | 301.0 | 0.35 |
| Pole Arc Ratio | Maximum Air-Gap Length | Induced Voltage | Cogging Torque | Average Torque | ||
|---|---|---|---|---|---|---|
| Fundamental | THD | Fundamental | Ripple | |||
| p.u. | mm | Vrms | % | % | kNm | % |
| 0.80 | 7 | 490.9 | 0.35 | 0.02% | 298.8 | 1.16% |
| 8 | 481.3 | 0.33 | 0.02% | 293.4 | 1.11% | |
| 9 | 473.4 | 0.35 | 0.02% | 288.8 | 1.20% | |
| 0.82 | 7 | 496.2 | 0.31 | 0.02% | 301.8 | 1.20% |
| 8 | 486.9 | 0.28 | 0.02% | 296.6 | 1.11% | |
| 9 | 479.1 | 0.31 | 0.02% | 292.1 | 1.18% | |
| 0.84 | 7 | 500.9 | 0.31 | 0.02% | 304.6 | 1.12% |
| 8 | 491.9 | 0.24 | 0.01% | 299.5 | 1.01% | |
| 9 | 484.3 | 0.27 | 0.02% | 295.2 | 1.04% | |
| 0.86 | 7 | 505.2 | 0.33 | 0.02% | 307.0 | 0.97% |
| 8 | 496.6 | 0.24 | 0.02% | 302.2 | 0.83% | |
| 9 | 489.0 | 0.25 | 0.02% | 297.9 | 0.82% | |
| 0.88 | 7 | 509.0 | 0.38 | 0.01% | 309.1 | 0.75% |
| 8 | 500.6 | 0.29 | 0.01% | 304.5 | 0.64% | |
| 9 | 493.3 | 0.28 | 0.02% | 300.4 | 0.57% | |
| 10 | 486.9 | 0.31 | 0.02% | 296.8 | 0.59% | |
| 0.90 | 7 | 512.2 | 0.45 | 0.02% | 311.0 | 0.53% |
| 8 | 504.2 | 0.36 | 0.02% | 306.6 | 0.58% | |
| 9 | 497.1 | 0.35 | 0.02% | 302.6 | 0.59% | |
| 10 | 490.7 | 0.36 | 0.02% | 299.0 | 0.50% | |
| 11 | 485.1 | 0.40 | 0.02% | 295.8 | 0.42% | |
| 12 | 480.2 | 0.44 | 0.02% | 293.0 | 0.38% | |
| 13 | 475.7 | 0.48 | 0.02% | 290.5 | 0.42% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, R.-W.; Lee, J. Alternative Surface-Mounted Permanent Magnet Topology for Reducing Voltage and Torque Harmonics in Shaft Generators. Energies 2023, 16, 4649. https://doi.org/10.3390/en16124649
Son R-W, Lee J. Alternative Surface-Mounted Permanent Magnet Topology for Reducing Voltage and Torque Harmonics in Shaft Generators. Energies. 2023; 16(12):4649. https://doi.org/10.3390/en16124649
Chicago/Turabian StyleSon, Rak-Won, and Ju Lee. 2023. "Alternative Surface-Mounted Permanent Magnet Topology for Reducing Voltage and Torque Harmonics in Shaft Generators" Energies 16, no. 12: 4649. https://doi.org/10.3390/en16124649