
Performance Analysis of Variable Cross-Section TEGs under Constant Heat Flux Conditions

Abstract
:1. Introduction
2. Materials and Methods
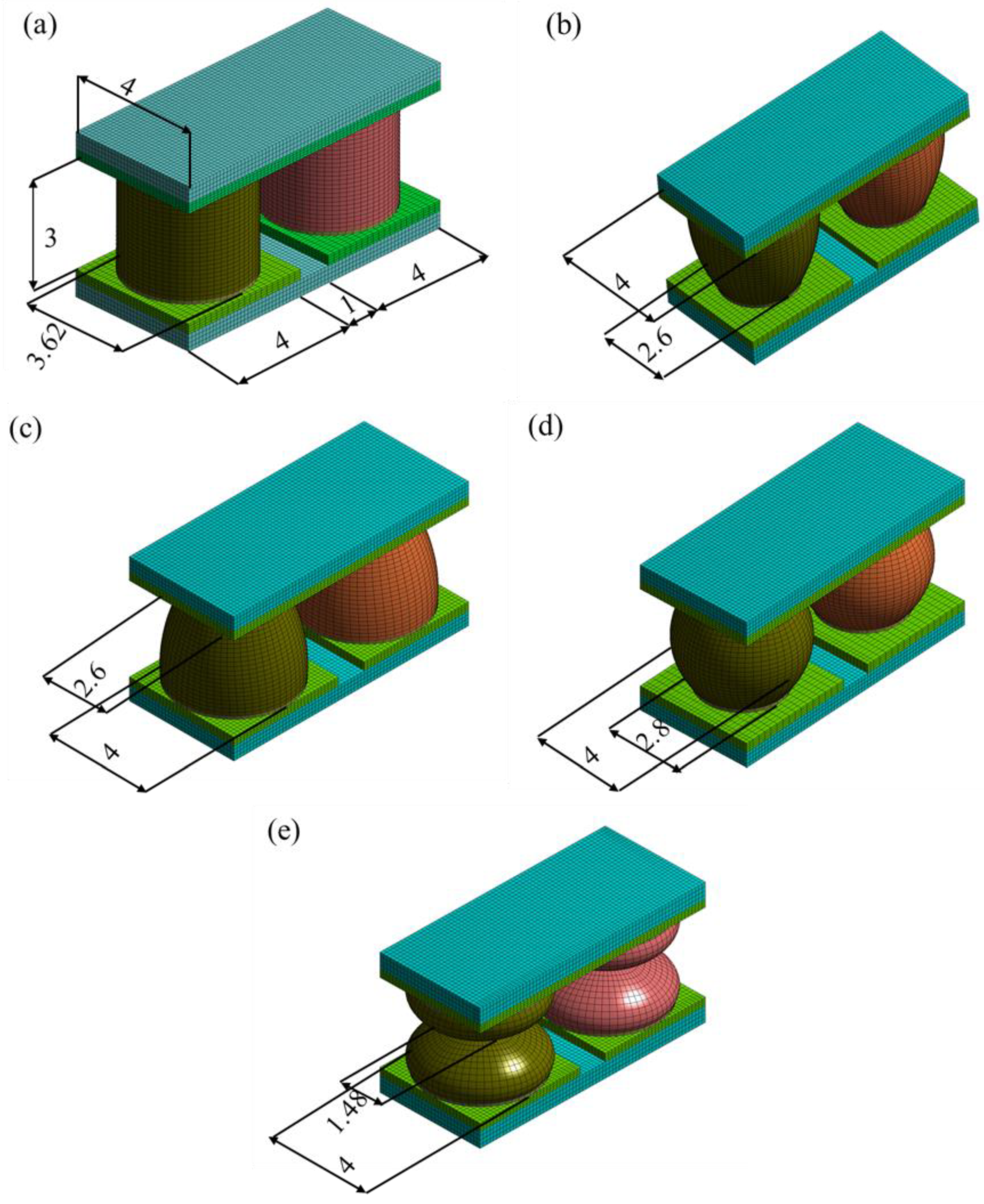
2.1. Physical Model
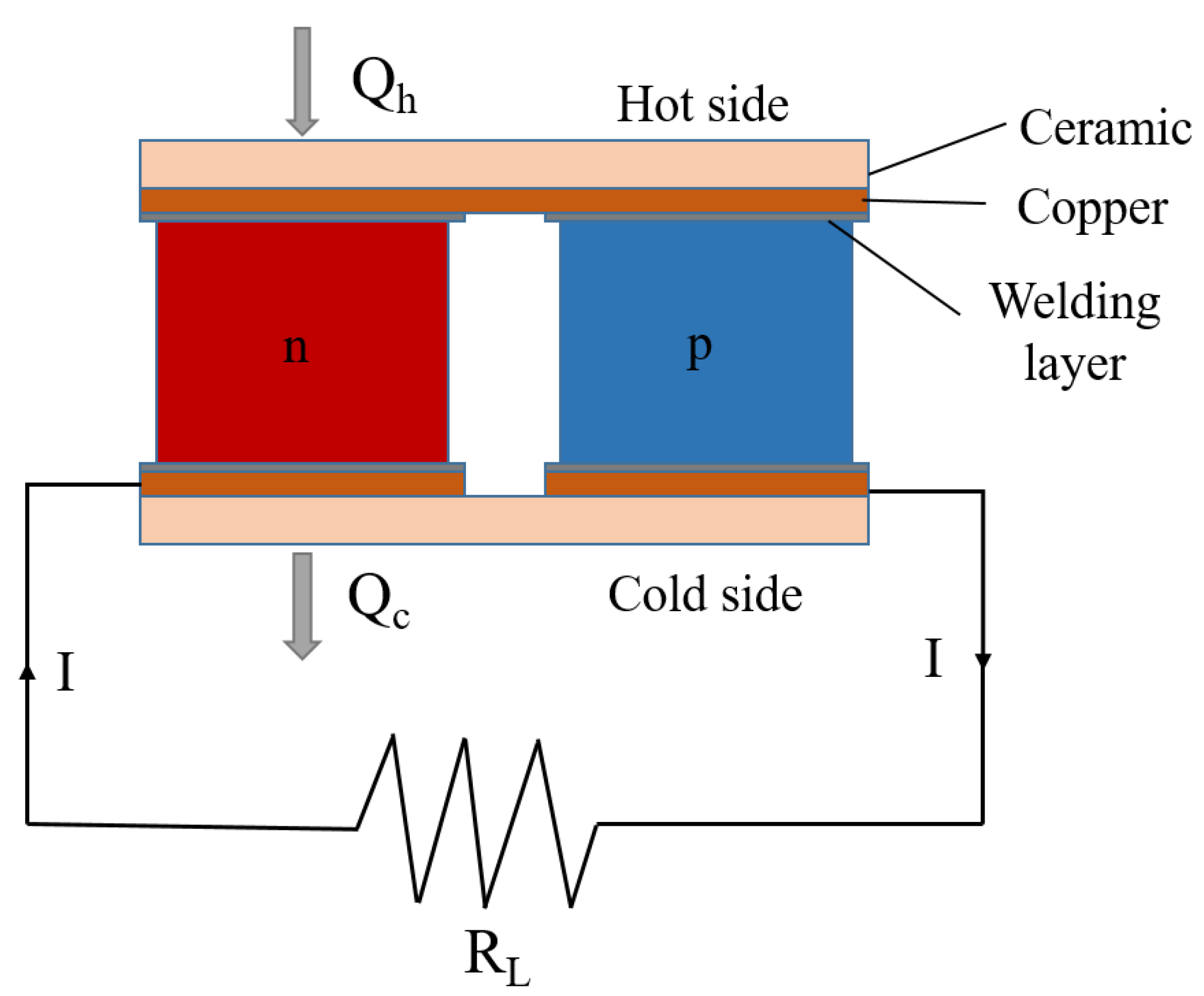
2.2. Boundary Conditions
2.3. Governing Equations
3. Results and Discussion
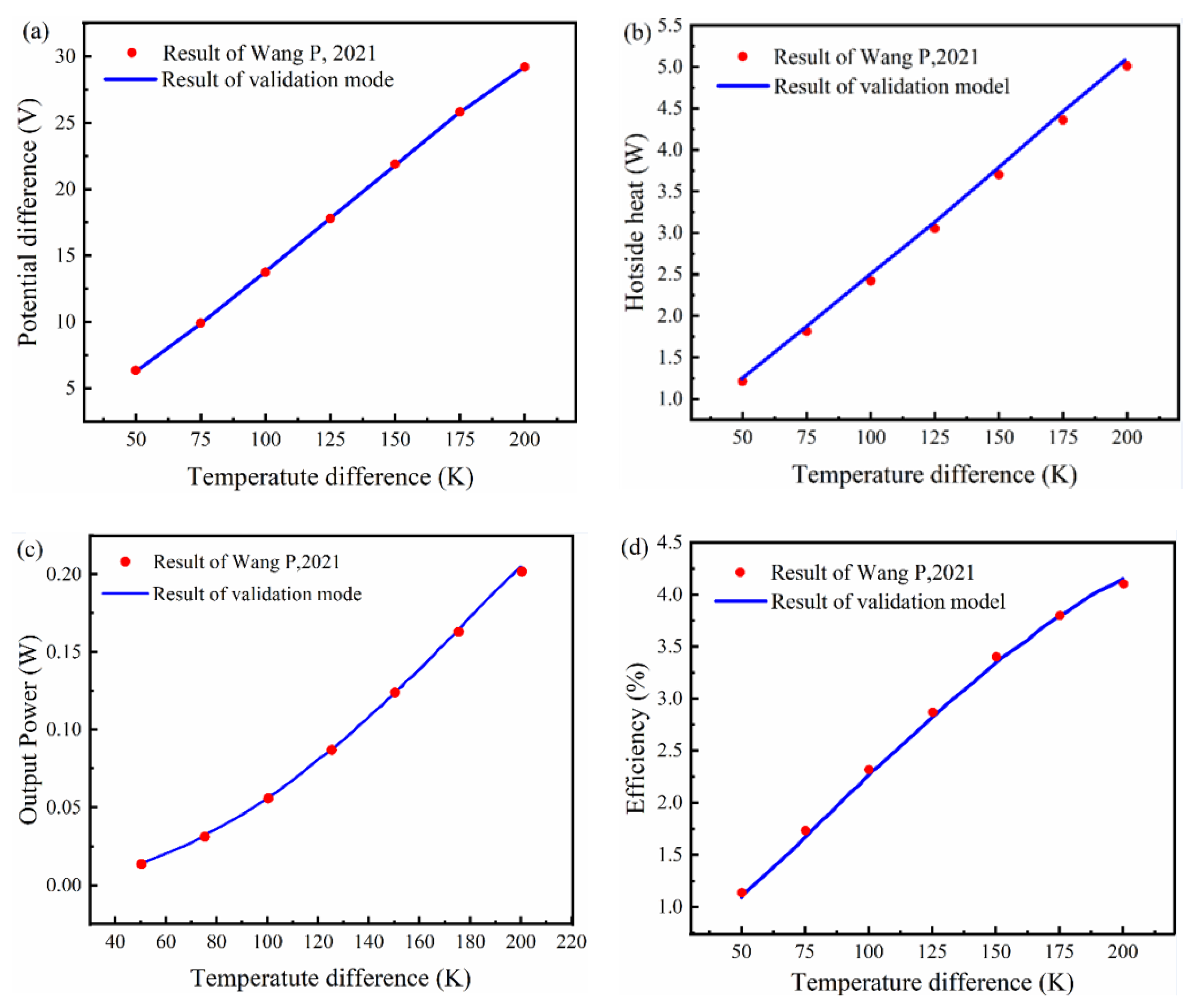
3.1. Model Validation
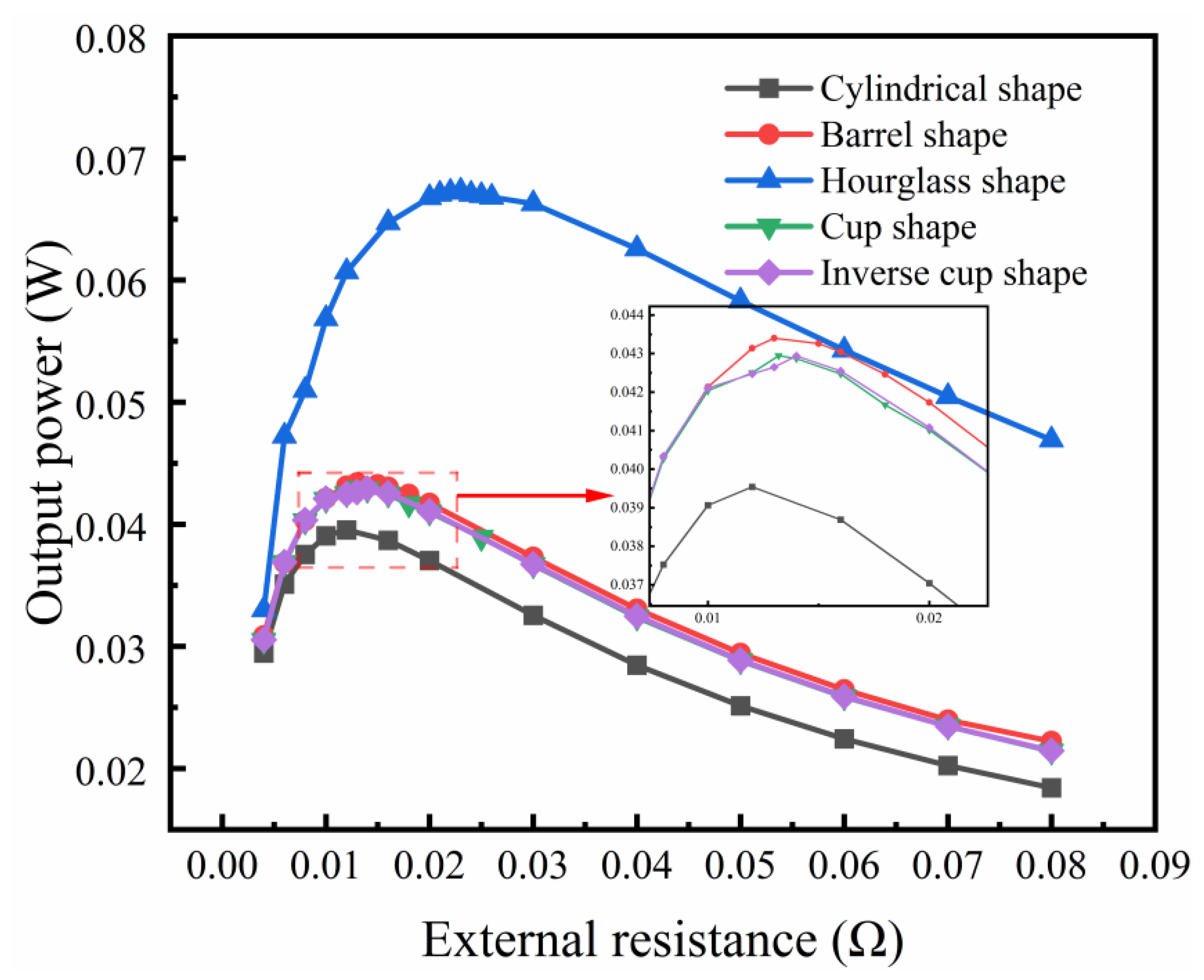
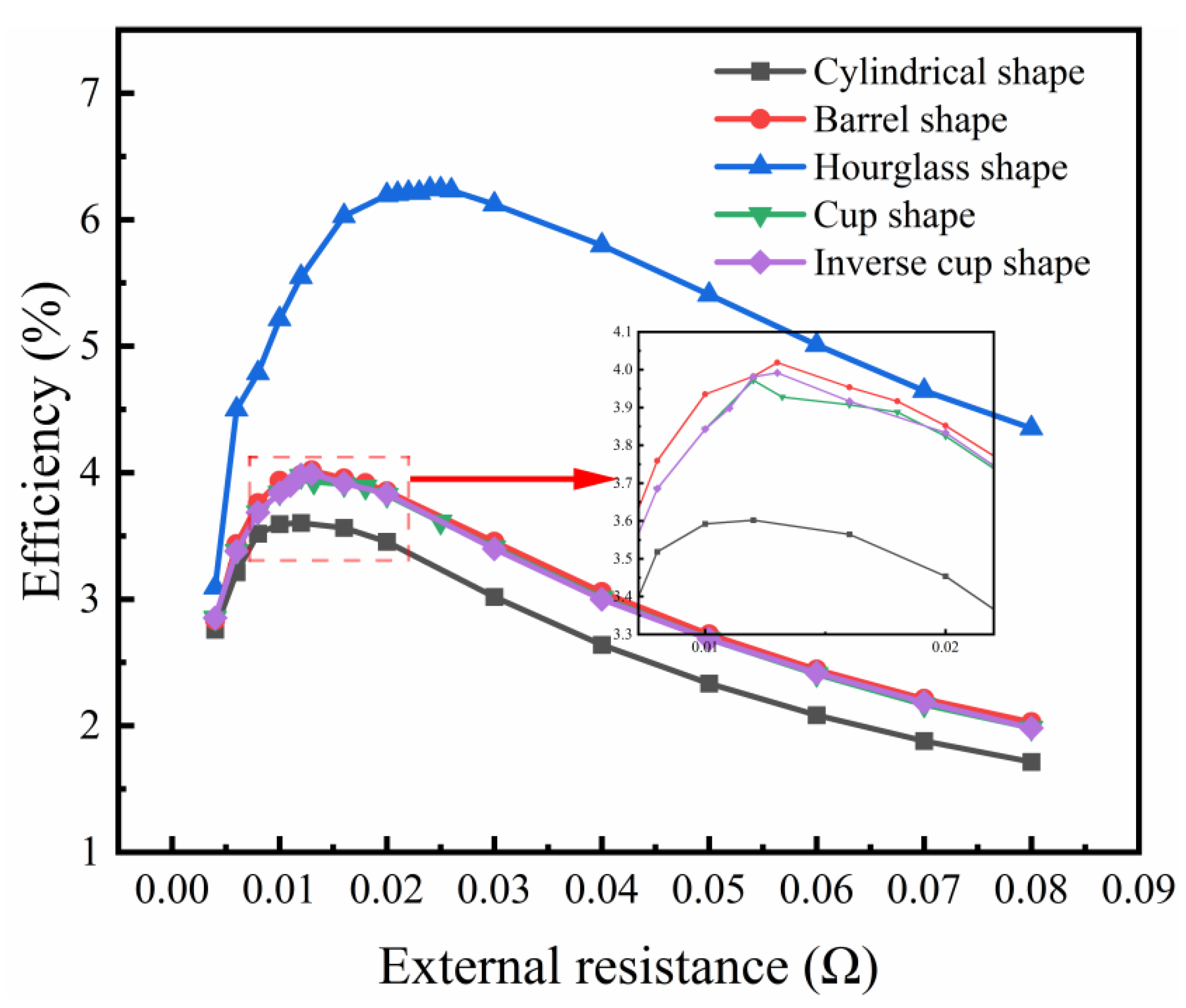
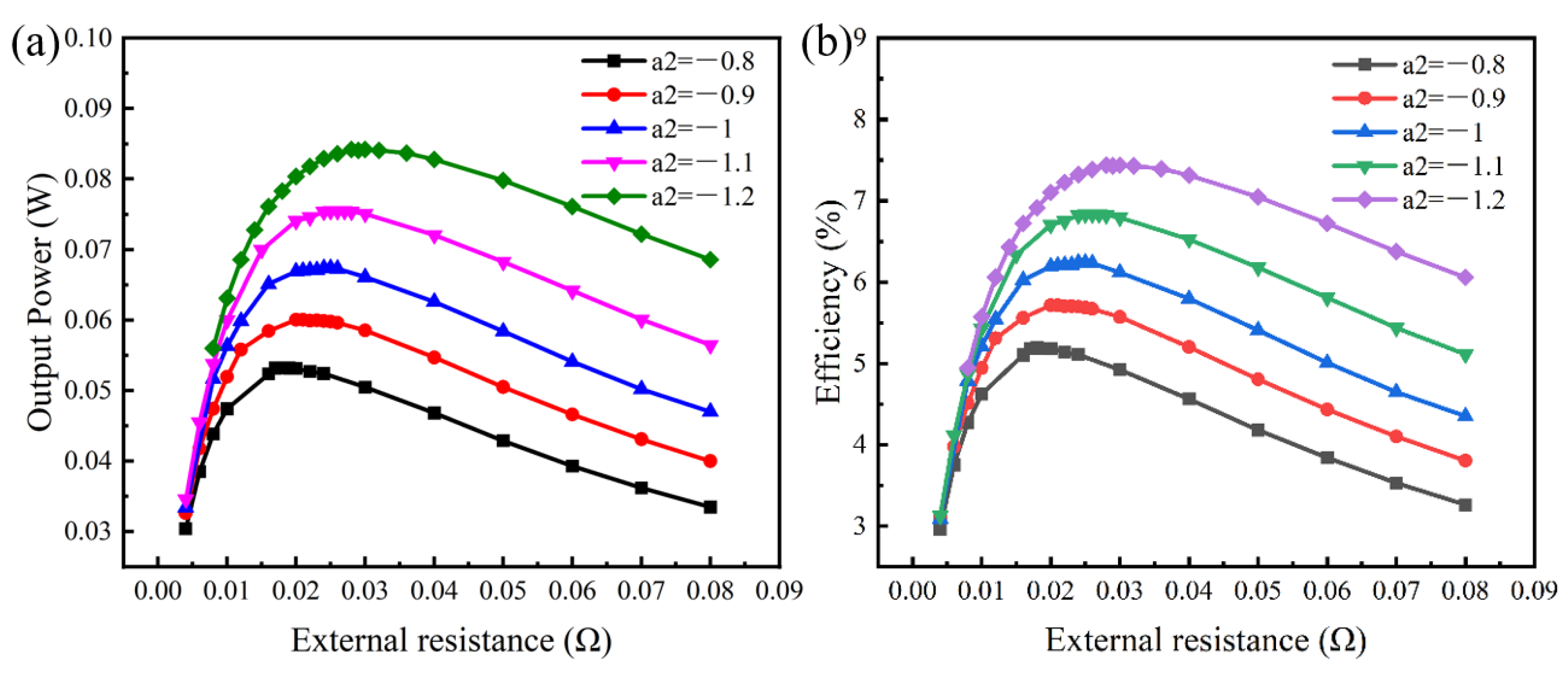
3.2. Effect of External Resistance on the Performance of Variable Cross-Section TEGs
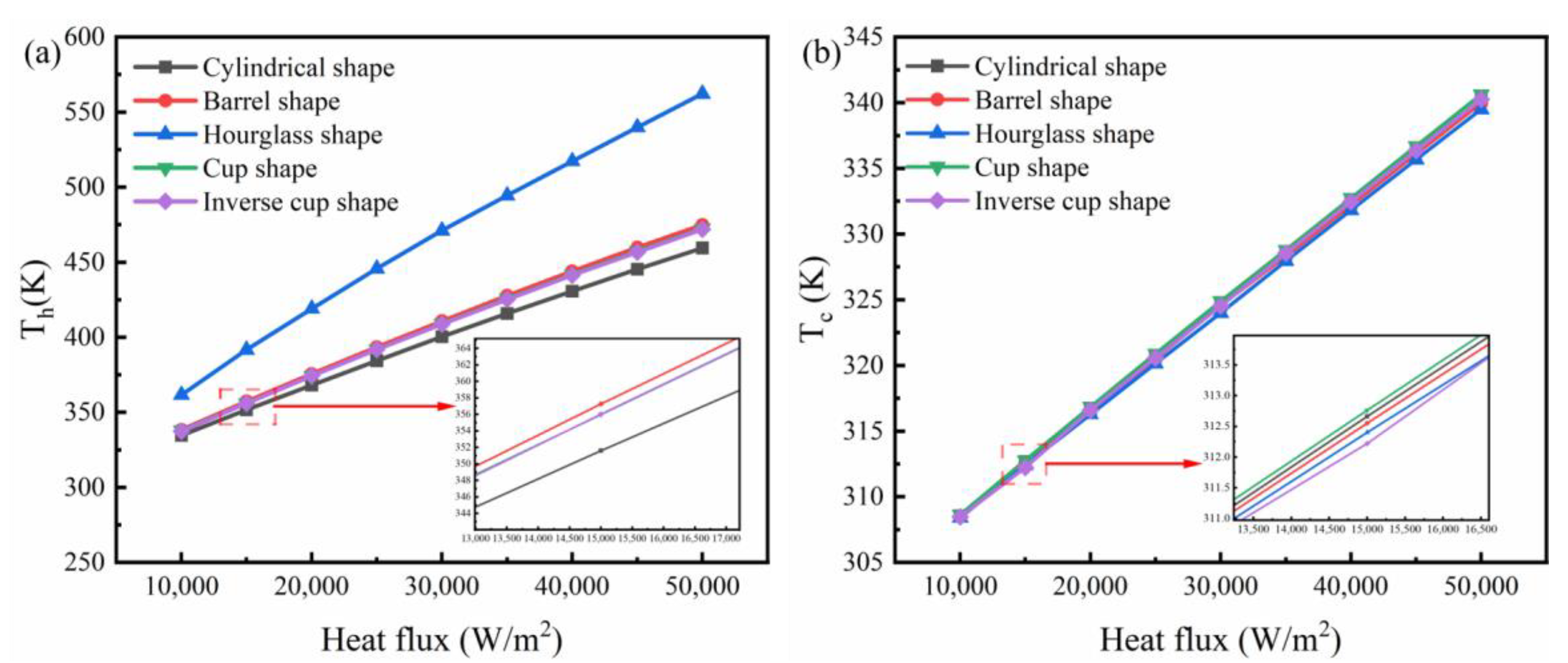
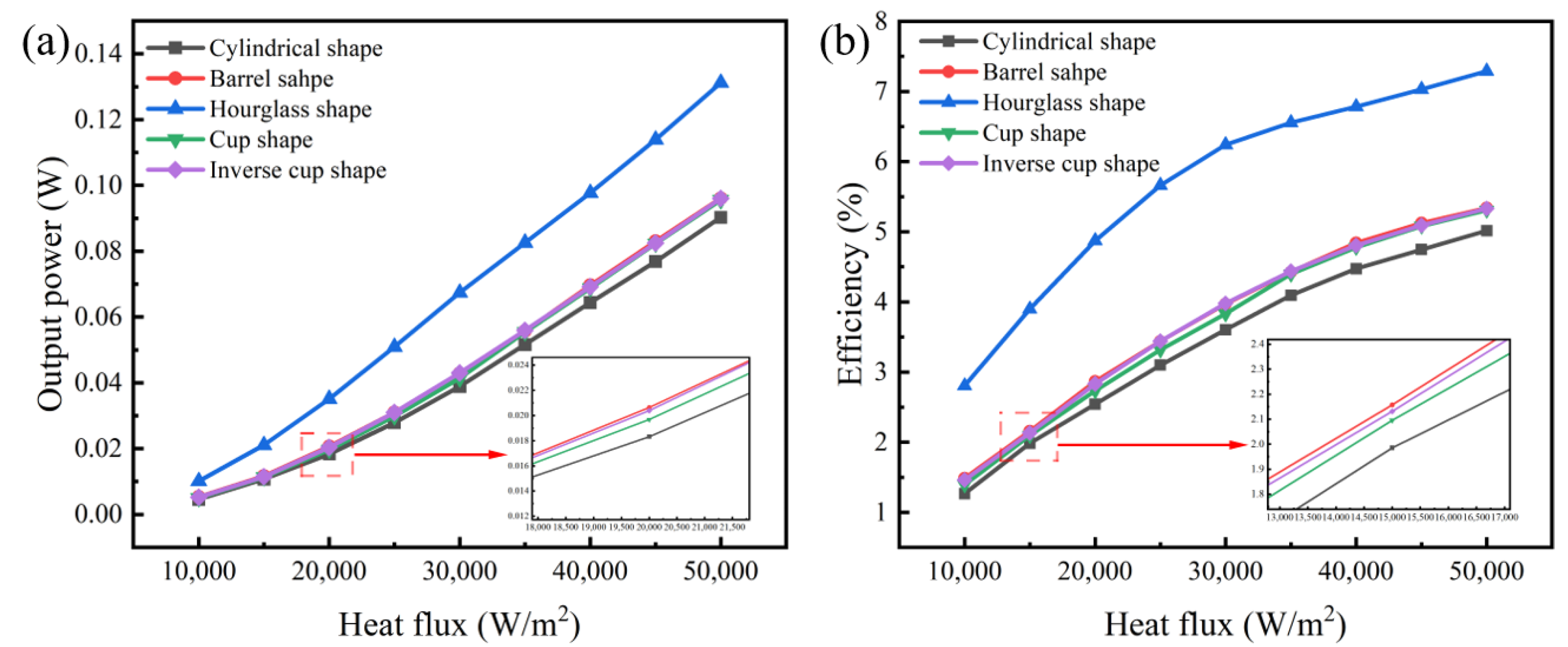
3.3. The Effect of Heat Flux on the Performance of Variable Cross-Section TEGs
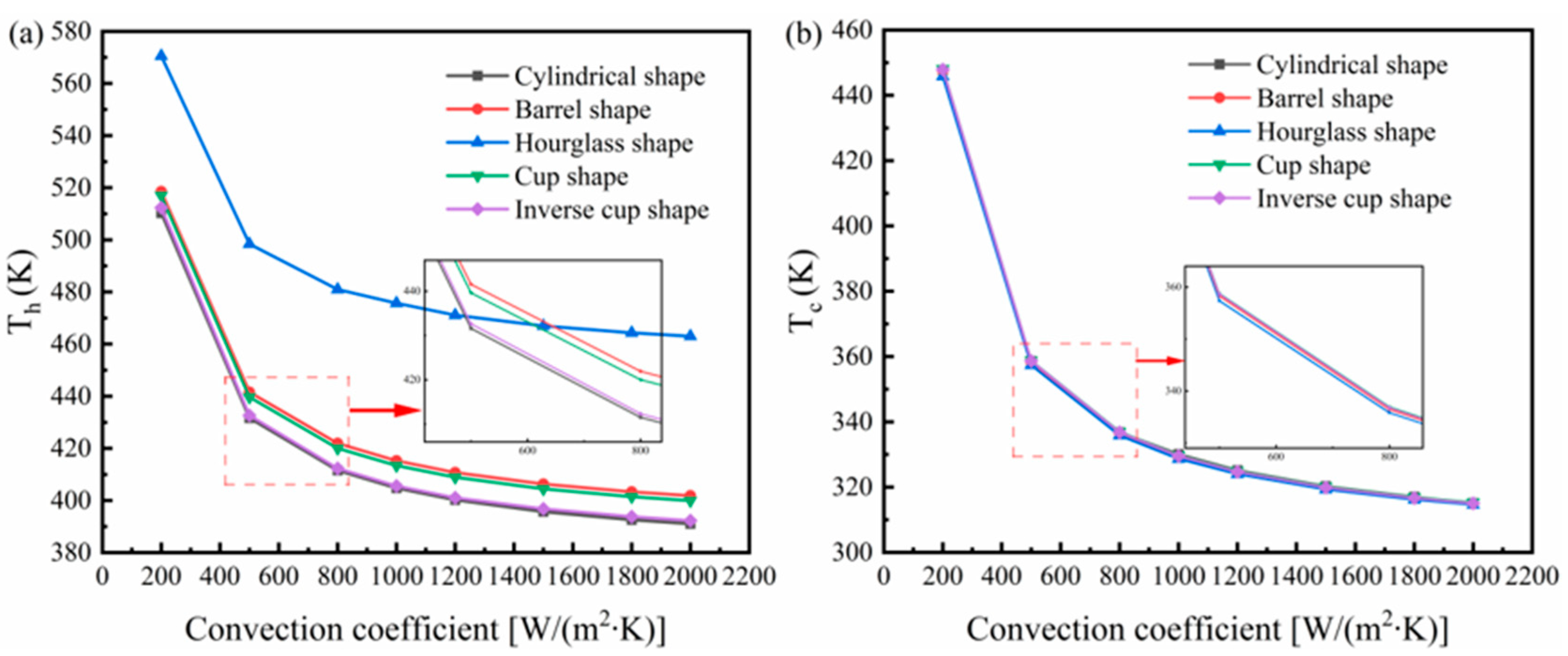
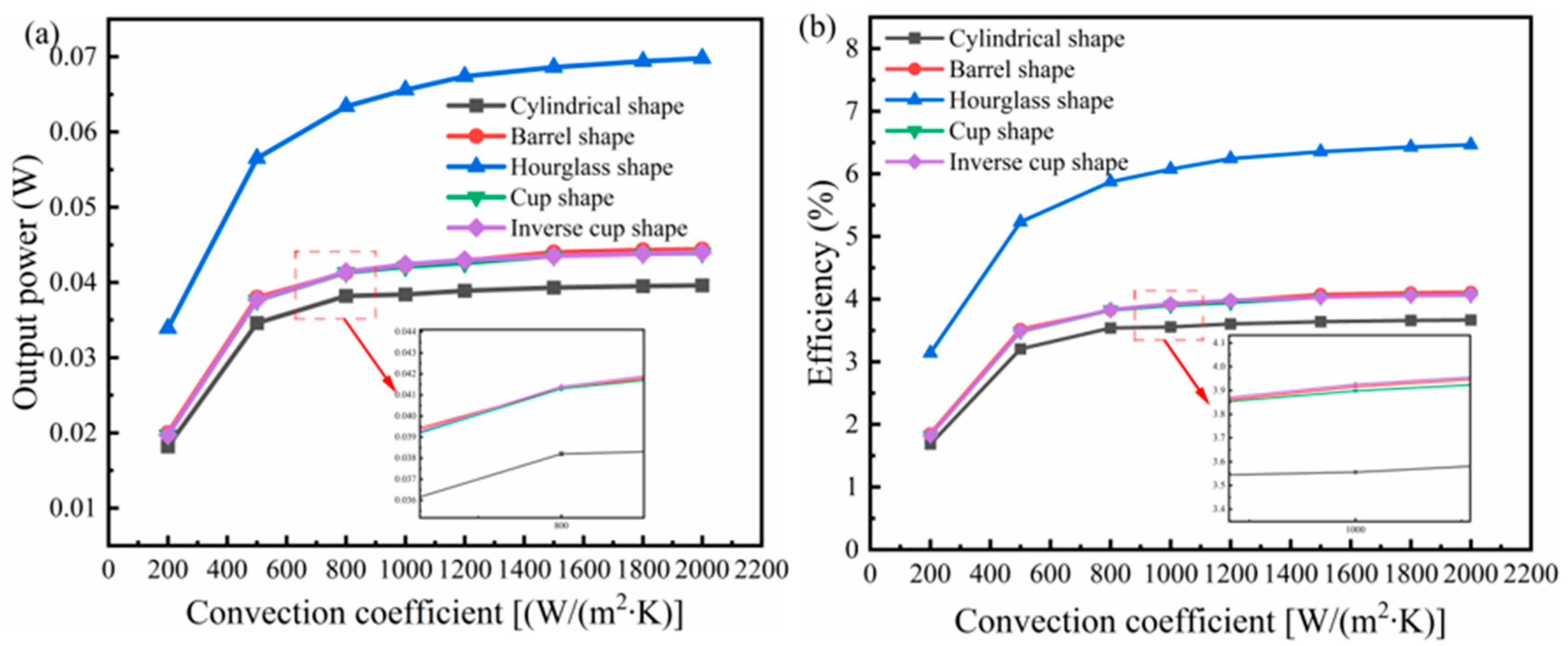
3.4. The Effect of the Convection Coefficient on the Performance of Variable Cross-Section TEGs
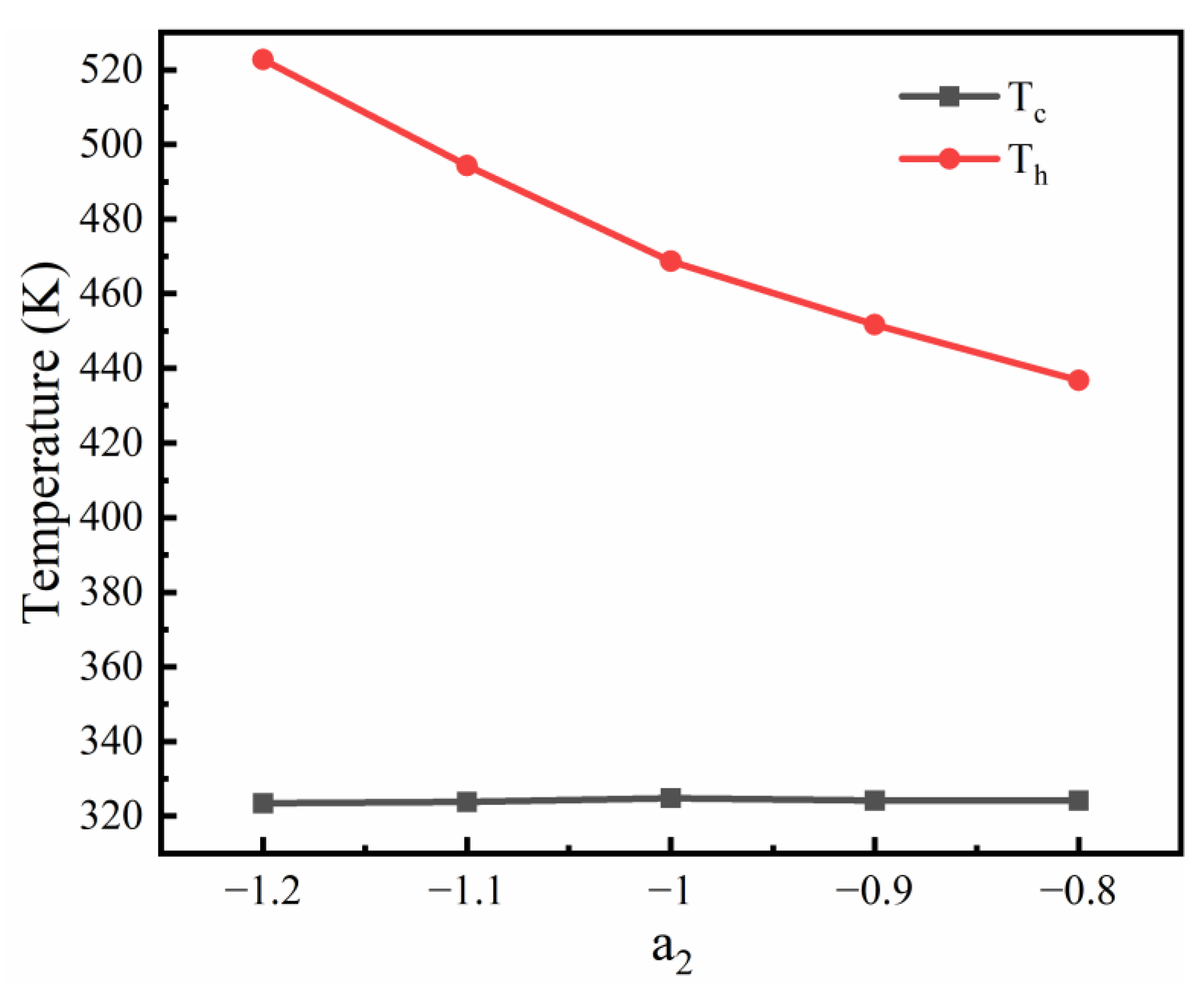
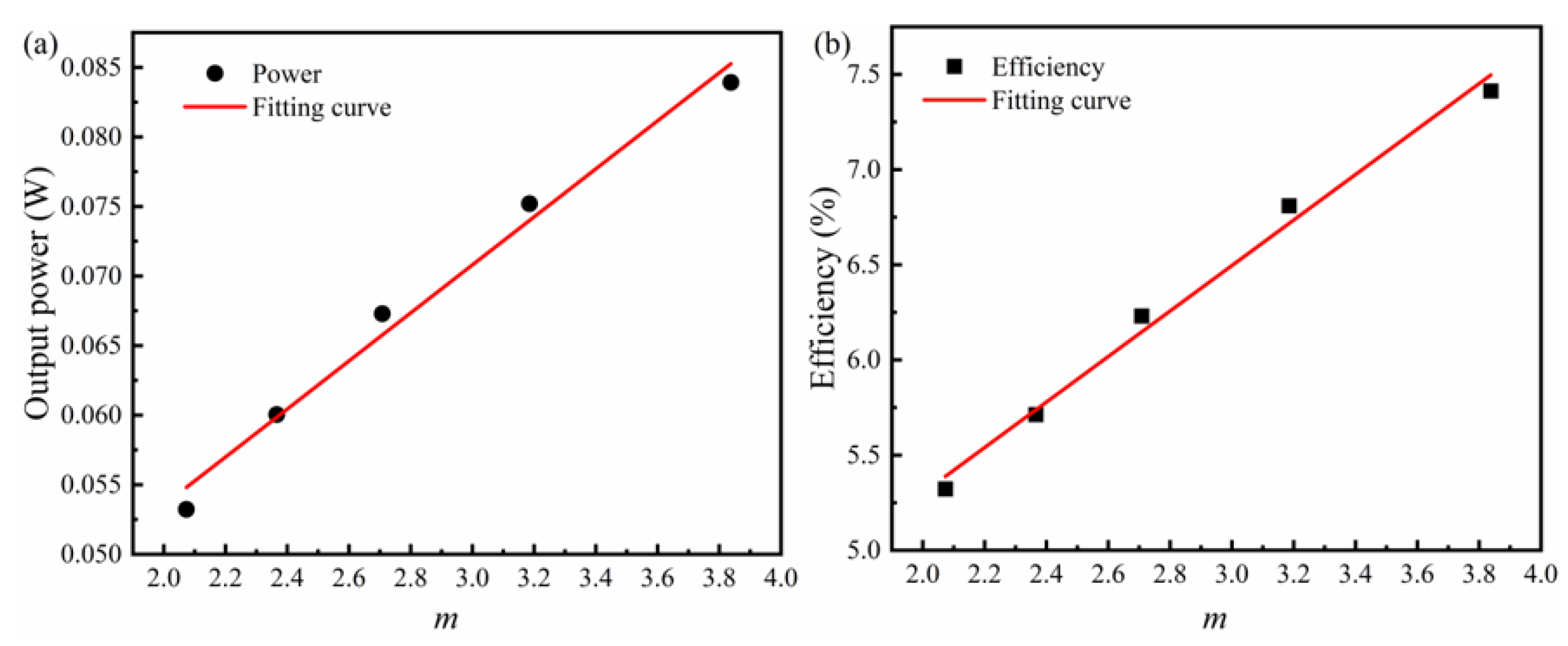
3.5. Performance Analysis of the Hourglass-Shaped TEG
4. Conclusions
- The configuration with variable cross-section can effectively enhance the output power and efficiency of the TEG. The hourglass-shaped TEG had the most outstanding behavior among the five shapes of TEGs.
- The hourglass-shape raised the maximum output power and efficiency to 0.067 W and 6.24%, which were 69.62% and 70.96% higher than the conventional cylindrical TEG, respectively.
- Higher heat flux is beneficial to the performance improvement of TEGs, and the convection coefficient of 1400 W/(m2∙K) is recommended because there was little enhancement on the performance when the convection coefficient was over 1400 W/(m2∙K).
- The relationships between the maximum output power and efficiency and the shape factor, m, of the hourglass-shaped TEG were obtained according to the fitting results. A larger m will lead to better performance of the hourglass-shaped TEG while the m cannot be too big with consideration of the real situation.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| A | area [mm2] | ZT | figure of merit |
| L | length [mm] | Greek letters | |
| V | volume [mm3] | ||
| V0 | initial volume [mm3] | α | Seebeck coefficient [V K−1] |
| heat power [W] | κ | thermal conductivity [W m−1 K−1] | |
| initial radius [mm] | η | efficiency | |
| radius [mm] | σ | electrical conductivity [S m−1] | |
| P | output power [W] | difference | |
| I | load current [A] | ||
| T | temperature [K] | ||
| V | voltage [V] | Subscripts | |
| E | electric flied [V m−1] | c | cold side |
| J | electric current flux [A m−2] | h | hot side |
| m | shape factor | in | input |
| Peltier coefficient | I | internal | |
| heat flux [W m−2] | out | output | |
| joule heating energy [W m−3] | L | load | |
| oc | open-circuit | ||
| leg | thermoelectric leg | ||
| Abbreviations | e | end | |
| BiTe | bismuth telluride | m | middle |
| TE | thermoelectric | ||
| TEG | thermoelectric generator | ||
References
- Champier, D. Thermoelectric generators: A review of applications. Energy Convers. Manag. 2017, 140, 167–181. [Google Scholar] [CrossRef]
- Zhou, Y.; Paul, S.; Bhunia, S. In Harvesting Wasted Heat in a Microprocessor Using Thermoelectric Generators: Modeling, Analysis and Measurement. In Proceedings of the Design, Automation and Test in Europe Conference and Exhibition, Munich, Germany, 10–14 March 2008; p. 96. [Google Scholar]
- Crane, D.T.; Lagrandeur, J.W. Progress Report on BSST-Led US Department of Energy Automotive Waste Heat Recovery Program. J. Electron. Mater. 2010, 39, 2142–2148. [Google Scholar] [CrossRef]
- Crane, D.; LaGrandeur, J.; Jovovic, V.; Ranalli, M.; Adldinger, M.; Poliquin, E.; Dean, J.; Kossakovski, D.; Mazar, B.; Maranville, C. TEG On-Vehicle Performance and Model Validation and what it Means for Further TEG Development. J. Electron. Mater. 2013, 42, 1582–1591. [Google Scholar] [CrossRef]
- Chen, Y.; Hou, X.N.; Ma, C.Y.; Dou, Y.K.; Wu, W.T. Review of Development Status of Bi2Te3-Based Semiconductor Thermoelectric Power Generation. Adv. Mater. Sci. Eng. 2018, 2018, 1210562. [Google Scholar] [CrossRef]
- Al-Merbati, A.S.; Yilbas, B.S.; Sahin, A.Z. Thermodynamics and thermal stress analysis of thermoelectric power generator: Influence of pin geometry on device performance. Appl. Therm. Eng. 2013, 50, 683–692. [Google Scholar] [CrossRef]
- Erturun, U.; Erermis, K.; Mossi, K. Effect of various leg geometries on thermo-mechanical and power generation performance of thermoelectric devices. Appl. Therm. Eng. 2014, 73, 128–141. [Google Scholar] [CrossRef]
- Sahin, A.Z.; Yilbas, B.S. The thermoelement as thermoelectric power generator: Effect of leg geometry on the efficiency and power generation. Energy Convers. Manag. 2013, 65, 26–32. [Google Scholar] [CrossRef]
- Erturun, U.; Mossi, K. Thermoelectric devices with rotated and coaxial leg configurations: Numerical analysis of performance. Appl. Therm. Eng. 2015, 85, 304–312. [Google Scholar] [CrossRef]
- Khalil, A.; Elhassnaoui, A.; Yadir, S.; Abdellatif, O.; Errami, Y.; Sahnoun, S. Performance comparison of TEGs for diverse variable leg geometry with the same leg volume. Energy 2021, 224, 119967. [Google Scholar] [CrossRef]
- Li, M.; Dizaji, H.S.; Asaadi, S.; Jarad, F.; Anqi, A.E.; Wae-hayee, M. Thermo-economic, exergetic and mechanical analysis of thermoelectric generator with hollow leg structure; impact of leg cross-section shape and hollow-to-filled area ratio. Case Stud. Therm. Eng. 2021, 27, 101314. [Google Scholar] [CrossRef]
- Liu, H.B.; Wang, S.L.; Yang, Y.R.; Chen, W.H.; Wang, X.D. Theoretical analysis of performance of variable cross-section thermoelectric generators: Effects of shape factor and thermal boundary conditions. Energy 2020, 201, 117660. [Google Scholar] [CrossRef]
- Karana, D.R.; Sahoo, R.R. Influence of geometric parameter on the performance of a new asymmetrical and segmented thermoelectric generator. Energy 2019, 179, 90–99. [Google Scholar] [CrossRef]
- Ge, Y.; He, K.; Xiao, L.H.; Yuan, W.Z.; Huang, S.M. Geometric optimization for the thermoelectric generator with variable cross-section legs by coupling finite element method and optimization algorithm. Renew. Energy 2022, 183, 294–303. [Google Scholar] [CrossRef]
- Wang, P.; Wang, B.L.; Wang, K.F.; Gao, R.X.; Xi, L. An analytical model for performance prediction and optimization of thermoelectric generators with varied leg cross-sections. Int. J. Heat Mass Transf. 2021, 174, 121292. [Google Scholar] [CrossRef]
- Hossain, M.S.; Li, T.Z.; Yu, Y.; Yong, J.; Bahk, J.H.; Skafidas, S. Recent advances in printable thermoelectric devices: Materials, printing techniques, and applications. RSC Adv. 2020, 10, 8421–8434. [Google Scholar] [CrossRef]
- Orrill, M.; LeBlanc, S. Printed thermoelectric materials and devices: Fabrication techniques, advantages, and challenges. J. Appl. Polym. Sci. 2017, 134, 44256. [Google Scholar] [CrossRef]
- Bian, M.X.; Xu, Z.H.; Meng, C.F.; Zhao, H.Y.; Tang, X.B. Novel geometric design of thermoelectric leg based on 3D printing for radioisotope thermoelectric generator. Appl. Therm. Eng. 2022, 212, 118514. [Google Scholar] [CrossRef]
- Ibeagwu, O.I. Modelling and comprehensive analysis of TEGs with diverse variable leg geometry. Energy 2019, 180, 90–106. [Google Scholar] [CrossRef]
- Jia, X.D.; Guo, Q.T. Design study of Bismuth-Telluride-based thermoelectric generators based on thermoelectric and mechanical performance. Energy 2020, 190, 116226. [Google Scholar] [CrossRef]
- Shittu, S.; Li, G.; Zhao, X.; Ma, X.; Akhlaghi, Y.G.; Ayodele, E. High performance and thermal stress analysis of a segmented annular thermoelectric generator. Energy Convers. Manag. 2019, 184, 180–193. [Google Scholar] [CrossRef]
- Date, A.; Date, A.; Dixon, C.; Akbarzadeh, A. Theoretical and experimental study on heat pipe cooled thermoelectric generators with water heating using concentrated solar thermal energy. Sol. Energy 2014, 105, 656–668. [Google Scholar] [CrossRef]
- Settaluri, K.T.; Lo, H.Y.; Ram, R.J. Thin Thermoelectric Generator System for Body Energy Harvesting. J. Electron. Mater. 2012, 41, 984–988. [Google Scholar] [CrossRef]
- Chen, W.H.; Wang, C.C.; Hung, C.I.; Yang, C.C.; Juang, R.C. Modeling and simulation for the design of thermal-concentrated solar thermoelectric generator. Energy 2014, 64, 287–297. [Google Scholar] [CrossRef]
- Sisik, B.; LeBlanc, S. The Influence of Leg Shape on Thermoelectric Performance Under Constant Temperature and Heat Flux Boundary Conditions. Front. Mater. 2020, 7, 595955. [Google Scholar] [CrossRef]
- Zhu, W.C.; Weng, Z.B.; Li, Y.; Zhang, L.Q.; Zhao, B.; Xie, C.J.; Shi, Y.; Huang, L.; Yan, Y.G. Theoretical analysis of shape factor on performance of annular thermoelectric generators under different thermal boundary conditions. Energy 2022, 239, 122285. [Google Scholar] [CrossRef]
- Ben Abdallah, G.; Besbes, S.; Ben Aissia, H.; Jay, J. Analysis of the effect of a pulsed heat flux on the performance improvements of a thermoelectric generator. Appl. Therm. Eng. 2019, 158, 113728. [Google Scholar] [CrossRef]
- Li, G.Q.; Zhao, X.D.; Jin, Y.; Chen, X.; Ji, J.; Shittu, S. Performance Analysis and Discussion on the Thermoelectric Element Footprint for PV-TE Maximum Power Generation. J. Electron. Mater. 2018, 47, 5344–5351. [Google Scholar] [CrossRef]
- Suzuki, R.O.; Ito, K.O.; Oki, S. Analysis of the Performance of Thermoelectric Modules Under Concentrated Radiation Heat Flux. J. Electron. Mater. 2016, 45, 1827–1835. [Google Scholar] [CrossRef]
- Ferreira-Teixeira, S.; Pereira, A.M. Geometrical optimization of a thermoelectric device: Numerical simulations. Energy Convers. Manag. 2018, 169, 217–227. [Google Scholar] [CrossRef]
- Ge, Y.; Liu, Z.C.; Sun, H.N.; Liu, W. Optimal design of a segmented thermoelectric generator based on three-dimensional numerical simulation and multi-objective genetic algorithm. Energy 2018, 147, 1060–1069. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shapes | Volume (mm3) | Length (mm) | ||
|---|---|---|---|---|
| Cylindrical leg | 0 | 0 | 30.96 | 3 |
| Cup leg | 0.06658 | −0.1 | 30.96 | 3 |
| Inverse cup leg | 0.06658 | −0.1 | 30.96 | 3 |
| Barrel leg | 0 | −0.2667 | 30.96 | 3 |
| Hourglass leg | 0.65903 | −1 | 30.96 | 3 |
| Properties | p-Type Bi2Te3 | n-Type Bi2Te3 | Ceramic | Copper | Welding Layer |
|---|---|---|---|---|---|
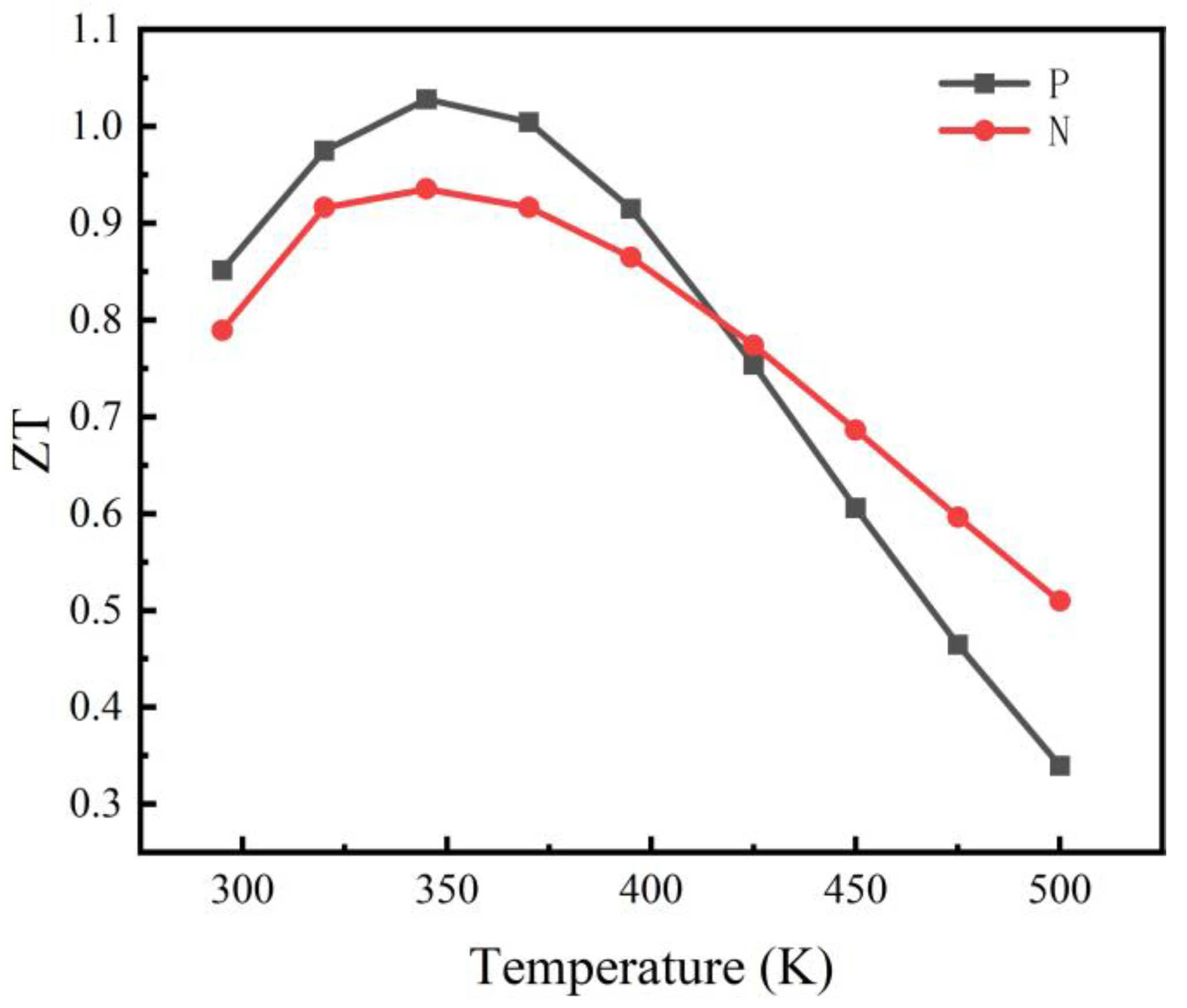
| Seebeck coefficient: α(T) [V K−1] | (−0.003638095 × T2 + 2.74380952 × T − 296.214286) × 10−6 | (0.00153073 × T2 − 1.08058874 × T2 − 28.338095) × 10−6 | |||
| Electrical conductivity: σ(T) [s m−1] | (0.015601732 × T2 − 15.708052 × T + 4466.38095 × 102 | (0.01057143 × T2 − 10.16048 × T + 3113.714229) × 102 | 5.814 × 103 | 7.299 × 103 | |
| Thermal conductivity: κ(T) [W m−1 K−1] | 0.0000361558 × T2 − 0.026351342 × T + 6.22162 | 0.0000334545 × T2 − 0.023350303 × T + 5.606333 | 27 | 400 | 37.8 |
| Model | Temperature Difference (K) |
|---|---|
| Cylindrical | 75.76 |
| Barrel shaped | 86.08 |
| Cup shaped | 83.26 |
| Inverse cup shaped | 83.20 |
| Hourglass shaped | 150.60 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Sun, Y.; Chen, G.; Zhai, P. Performance Analysis of Variable Cross-Section TEGs under Constant Heat Flux Conditions. Energies 2023, 16, 4473. https://doi.org/10.3390/en16114473
Liu J, Sun Y, Chen G, Zhai P. Performance Analysis of Variable Cross-Section TEGs under Constant Heat Flux Conditions. Energies. 2023; 16(11):4473. https://doi.org/10.3390/en16114473
Chicago/Turabian StyleLiu, Junpeng, Yajing Sun, Gang Chen, and Pengcheng Zhai. 2023. "Performance Analysis of Variable Cross-Section TEGs under Constant Heat Flux Conditions" Energies 16, no. 11: 4473. https://doi.org/10.3390/en16114473