
A Novel Torque Matching Strategy for Dual Motor-Based All-Wheel-Driving Electric Vehicles

 , , , and
, , , and
Abstract
:1. Introduction
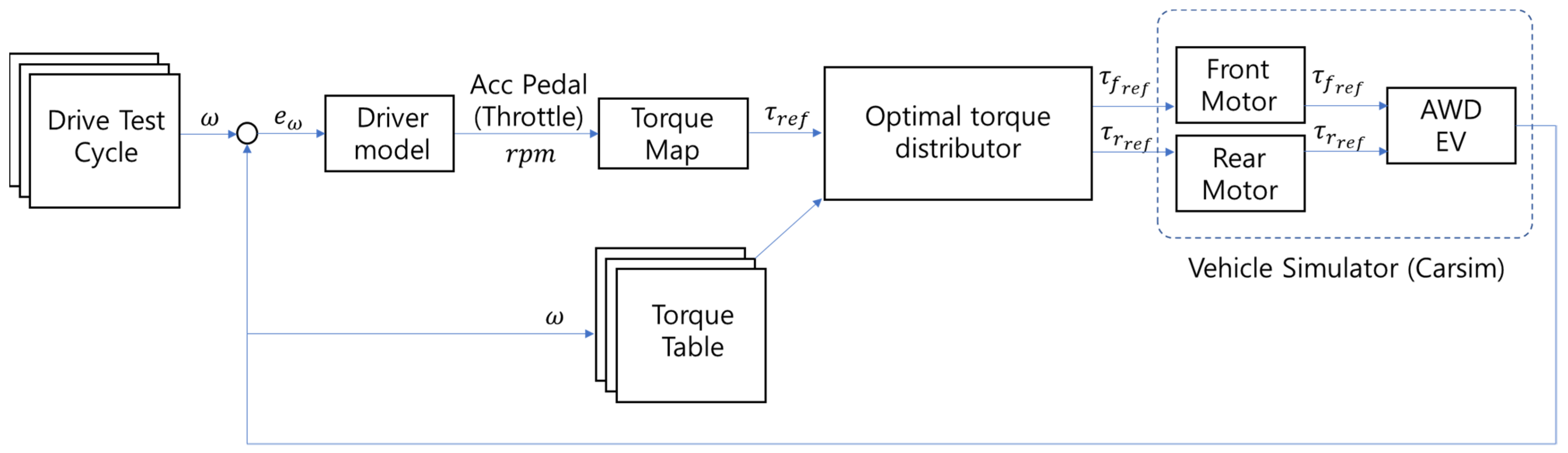
2. TMS Algorithm Verification Environment Configuration
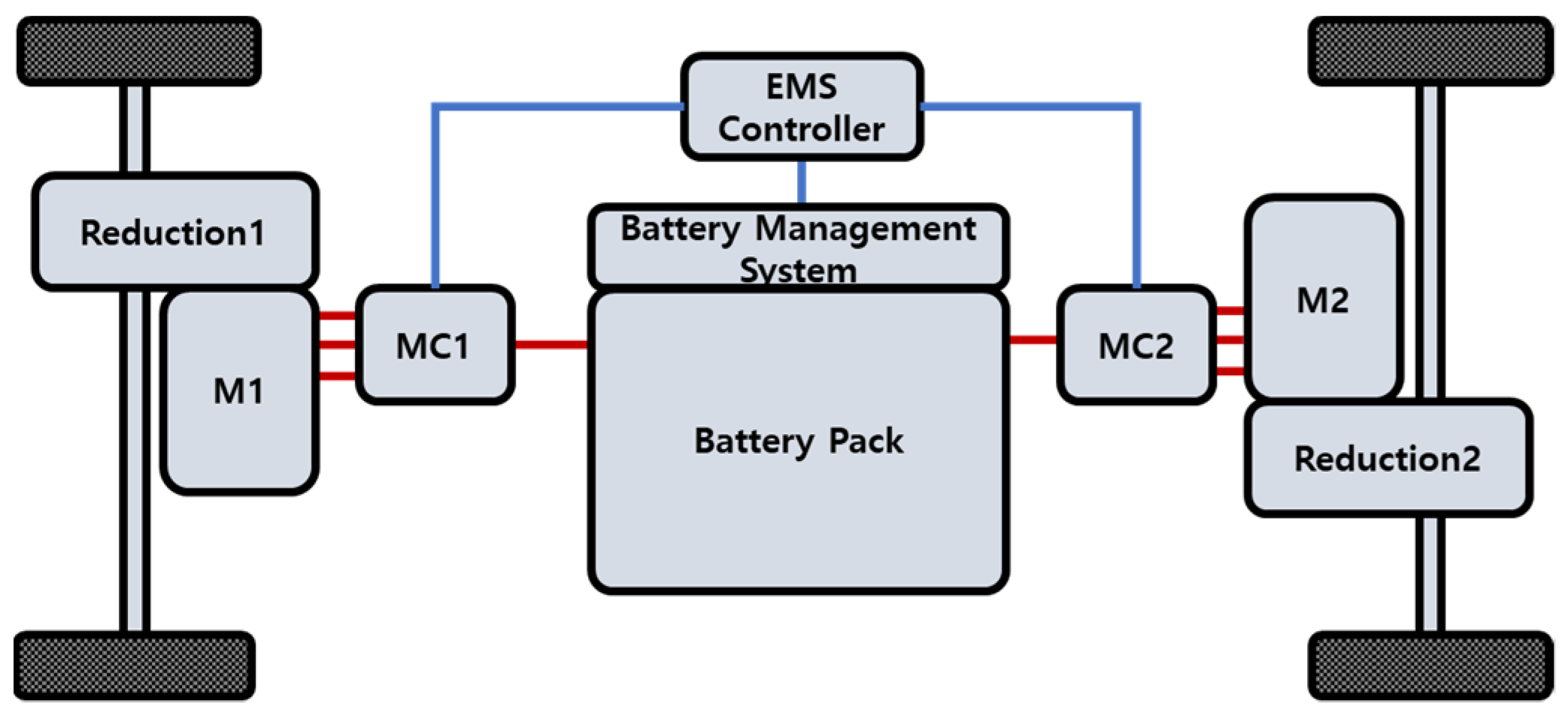
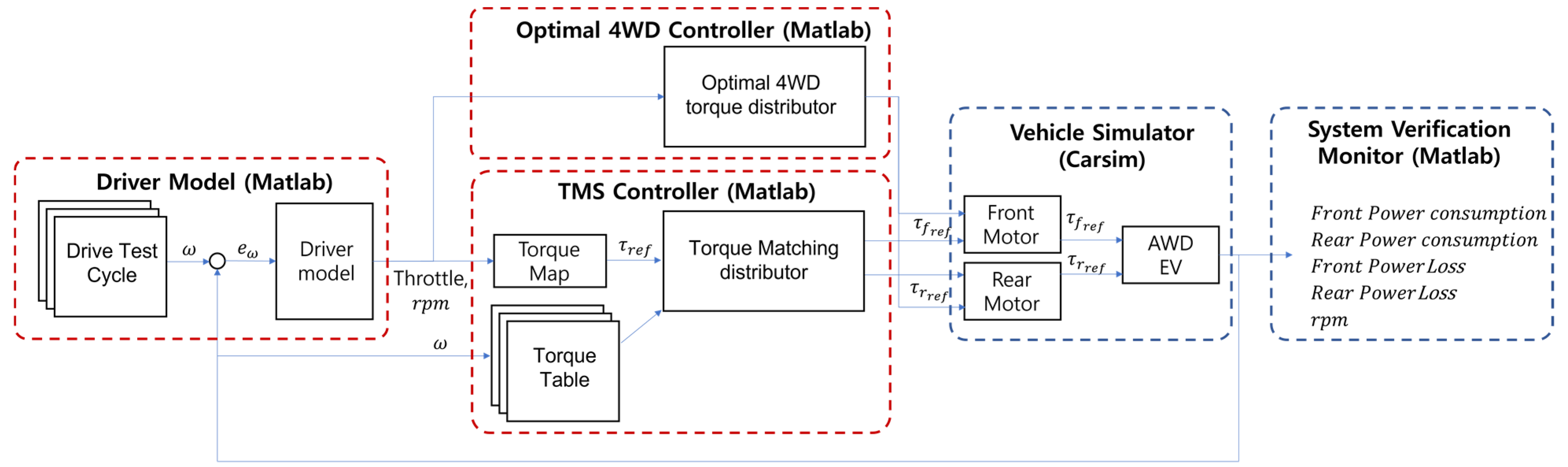
2.1. Dual Motor Based All-Wheel-Drive System Simulation Composition
2.2. Simulation Environment Configuration
3. Torque Matching Strategy Design
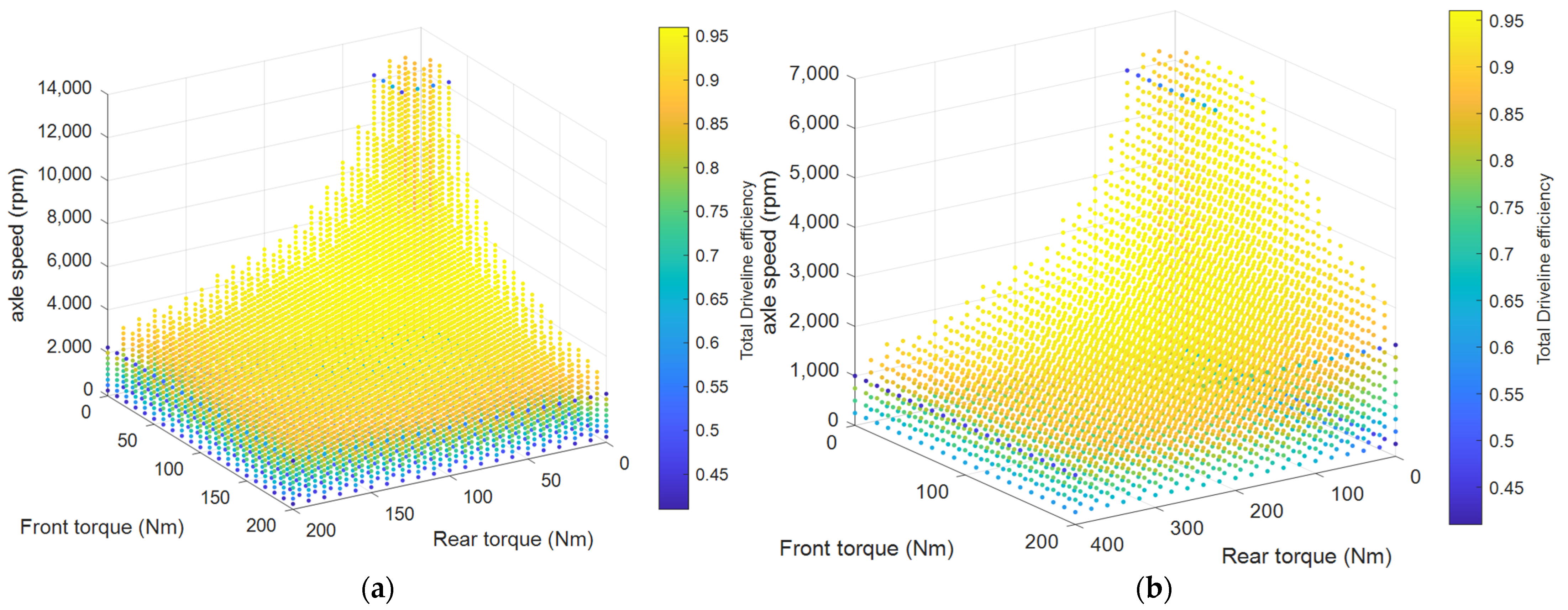
3.1. Drive Torque Distribution Calculation
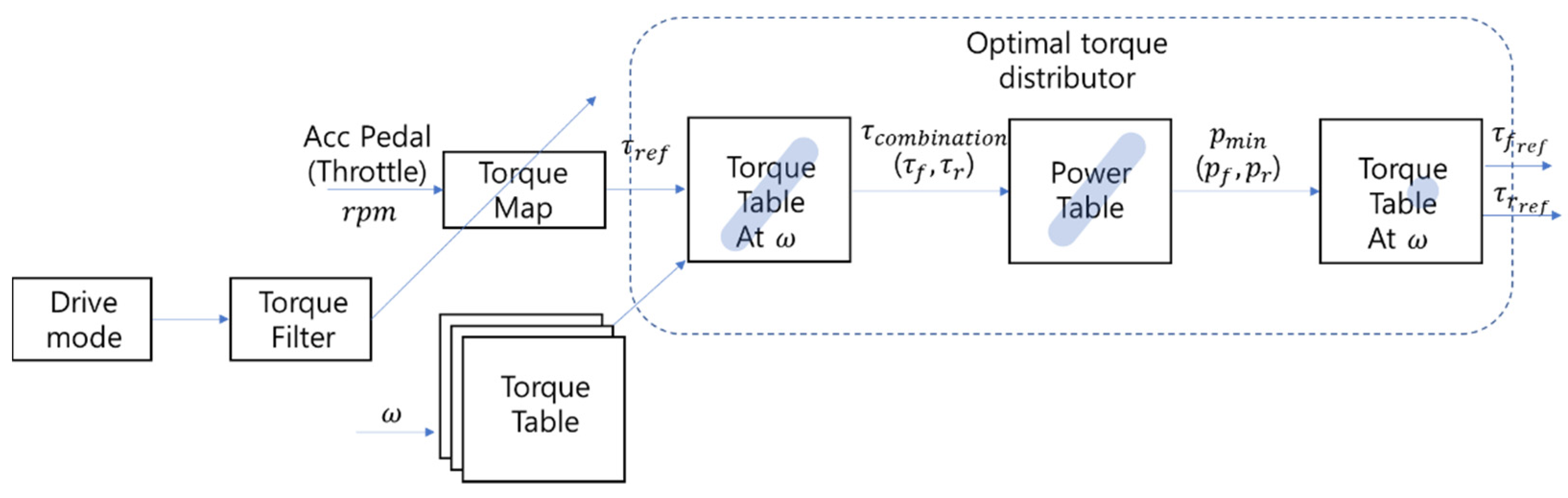
3.2. Composition of TMS
4. TMS Operation Verification through Torque Distribution Rate Comparison
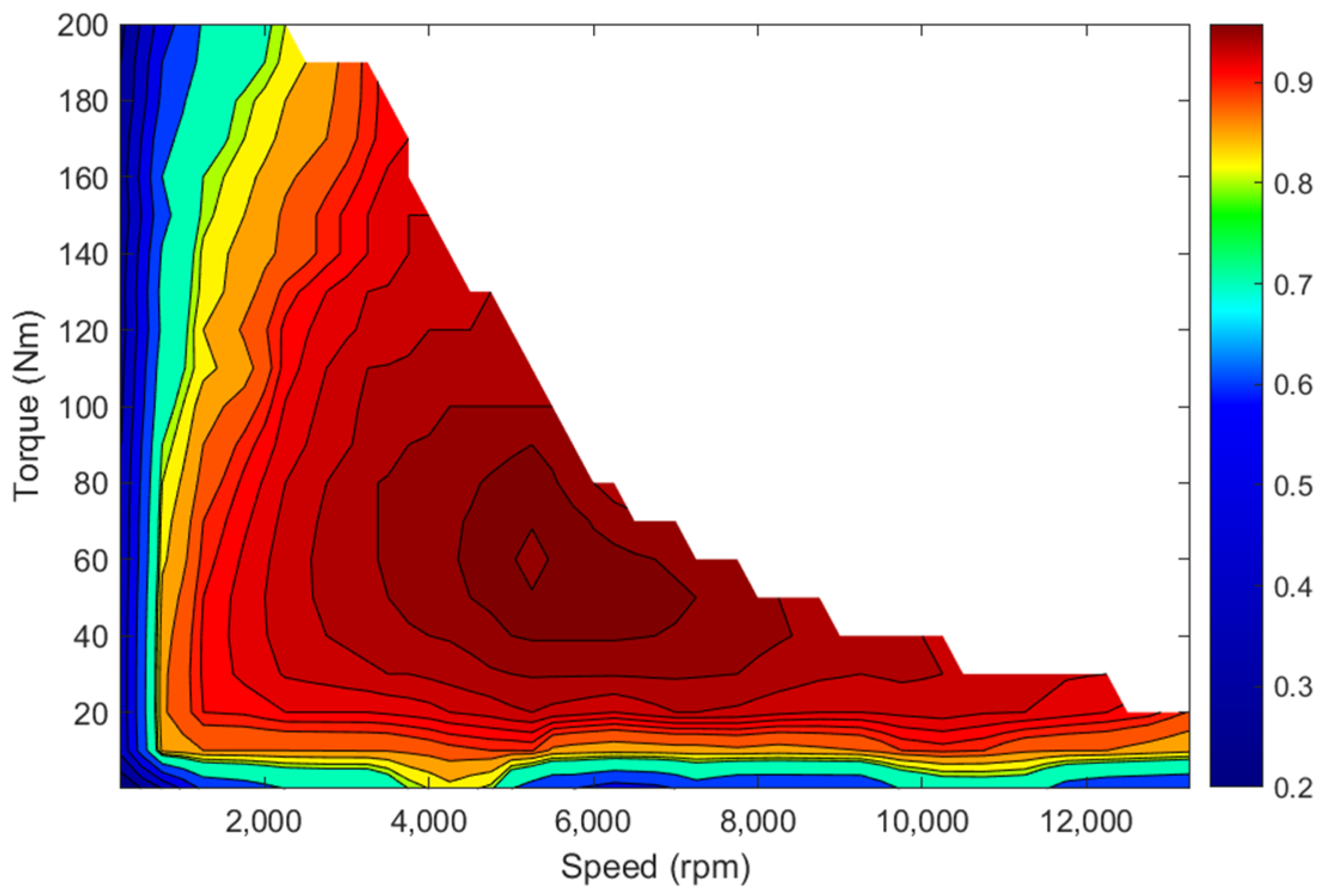
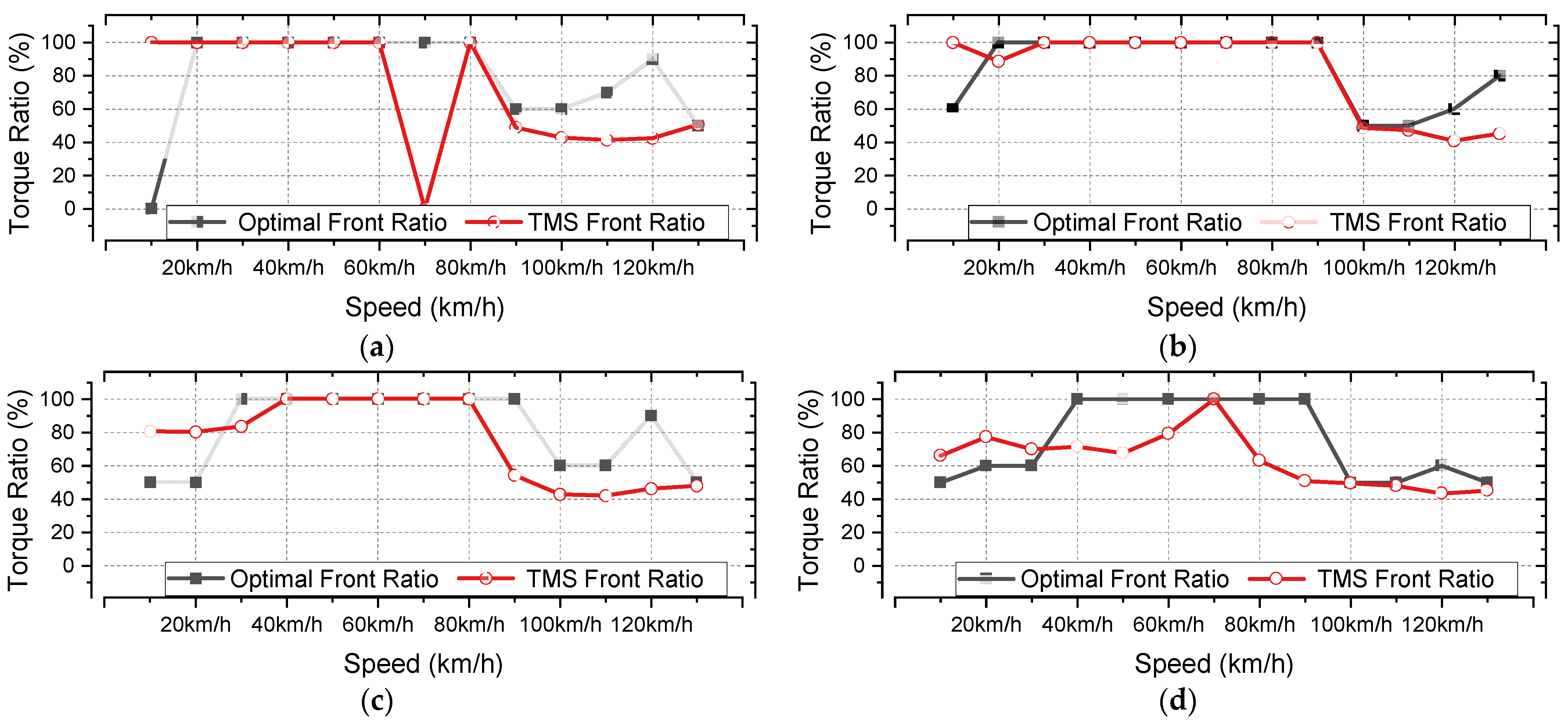
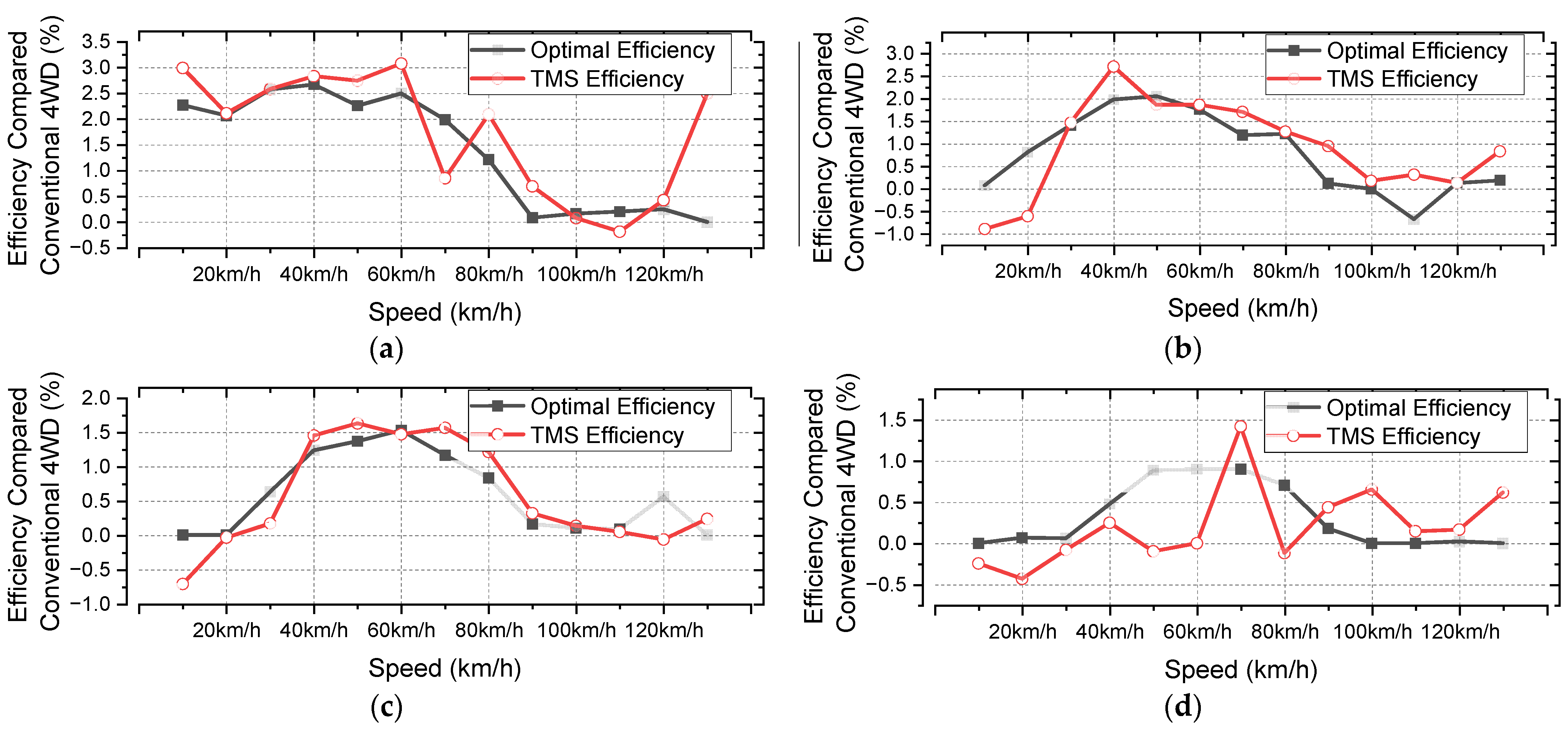
4.1. Optimal Torque Distribution Ratio According to Gear Ratio
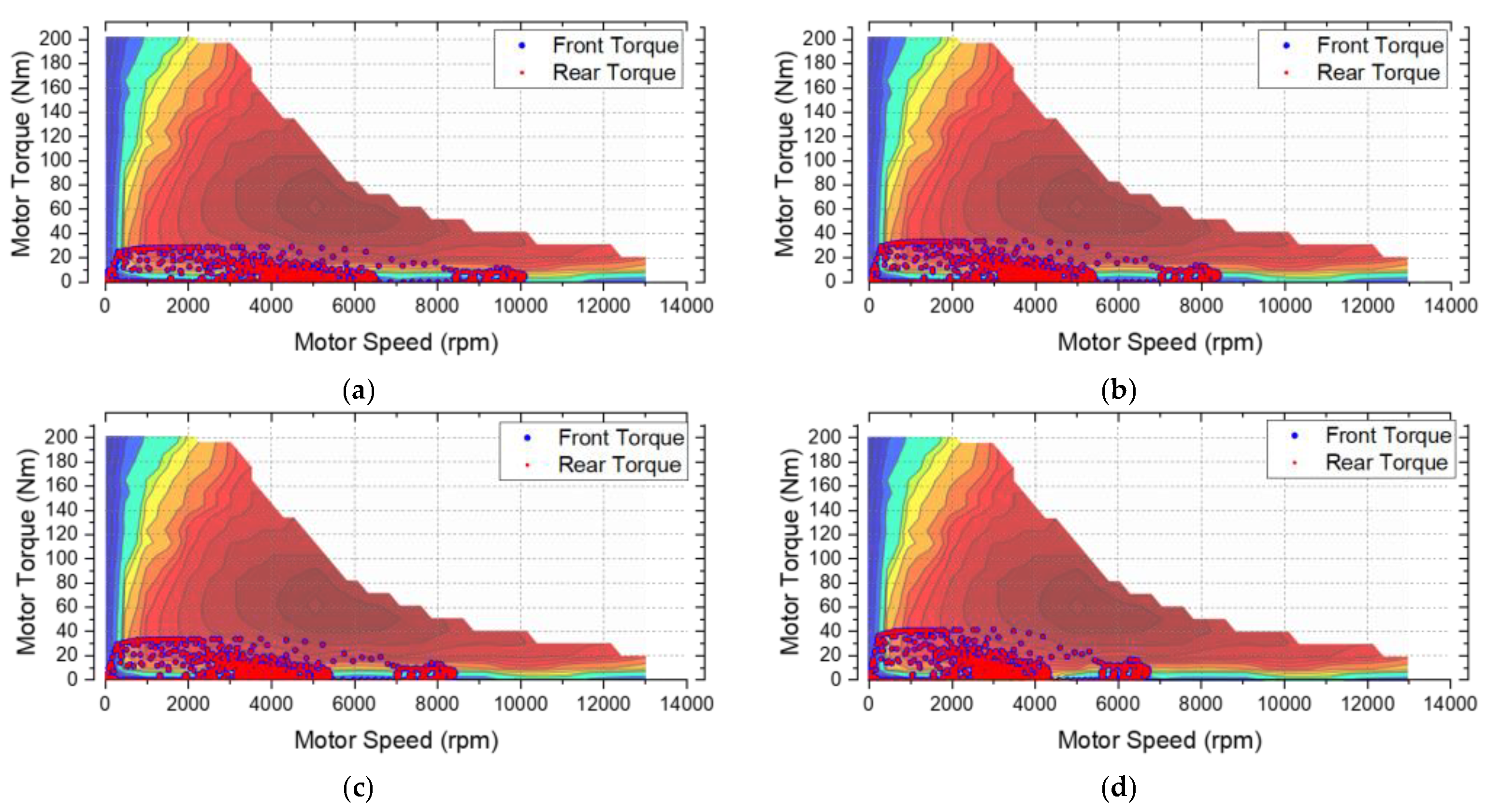
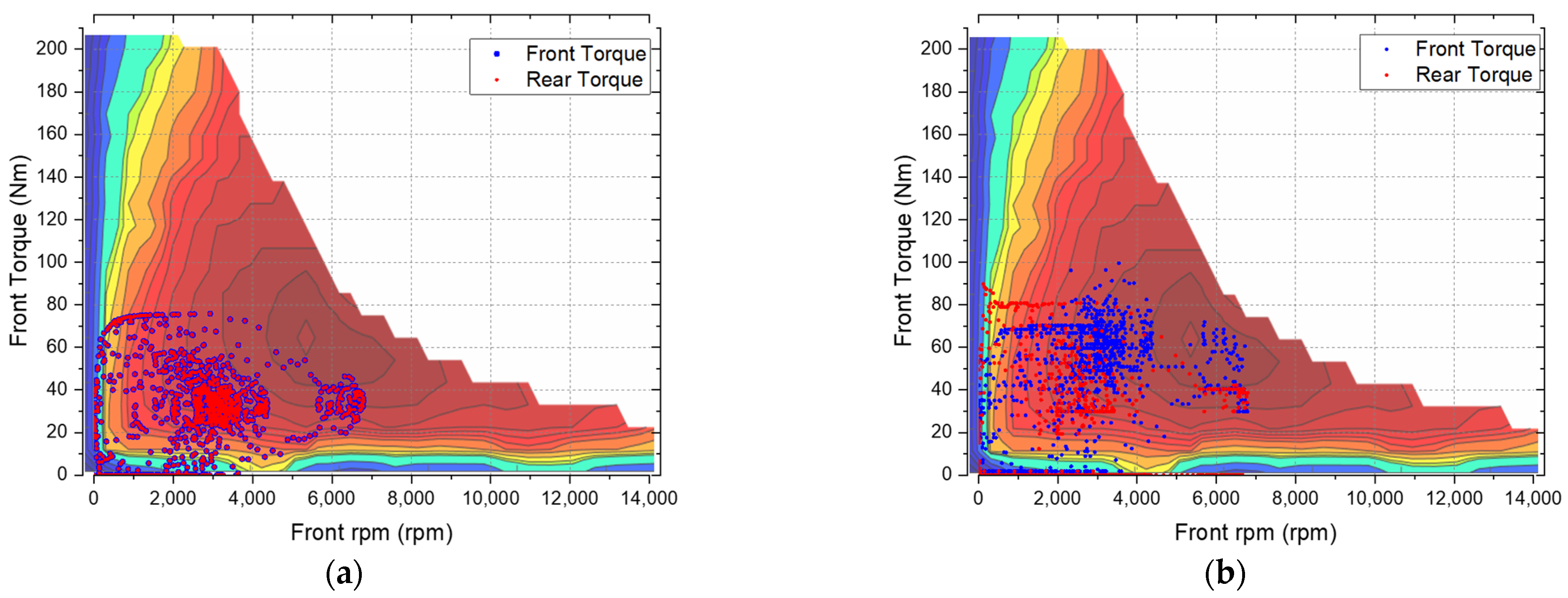
4.2. TMS Operation Verification in Load Environment
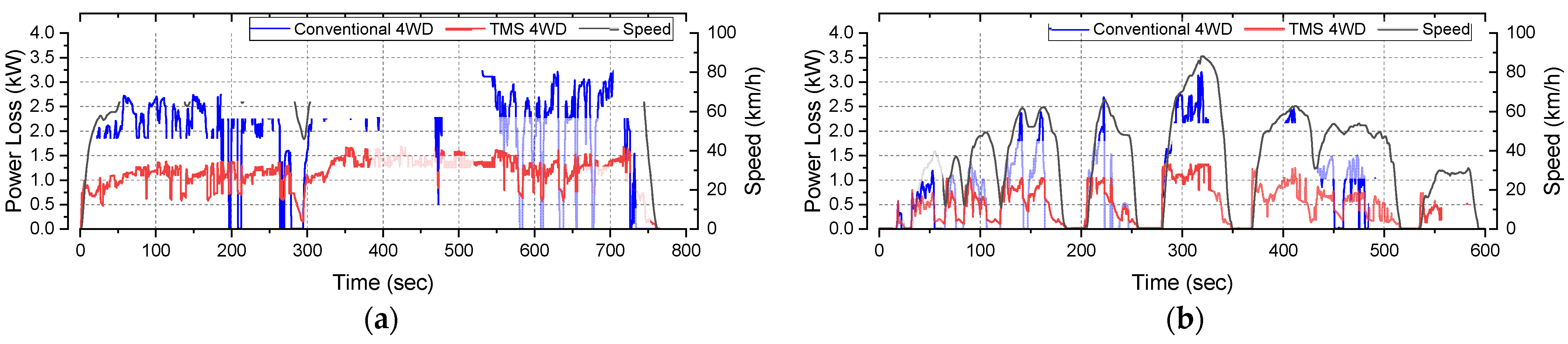
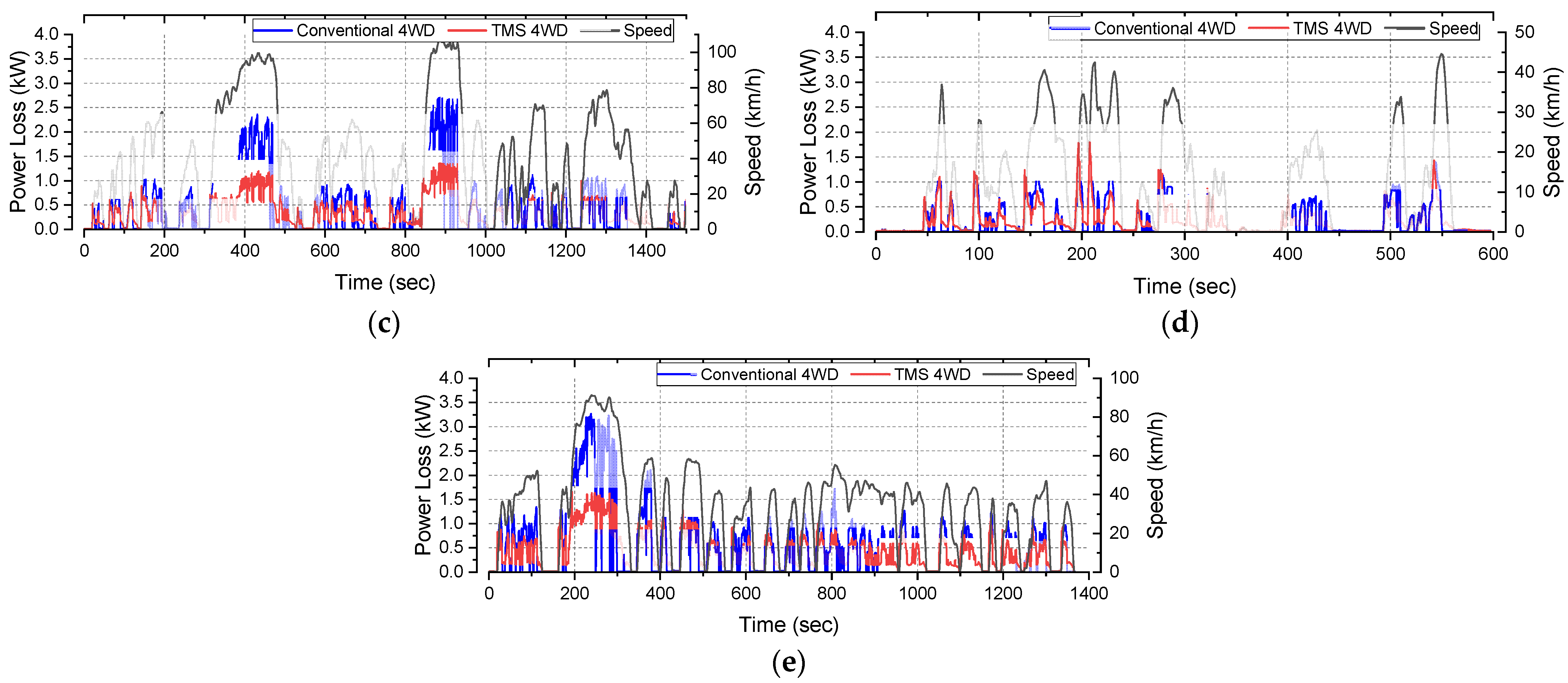
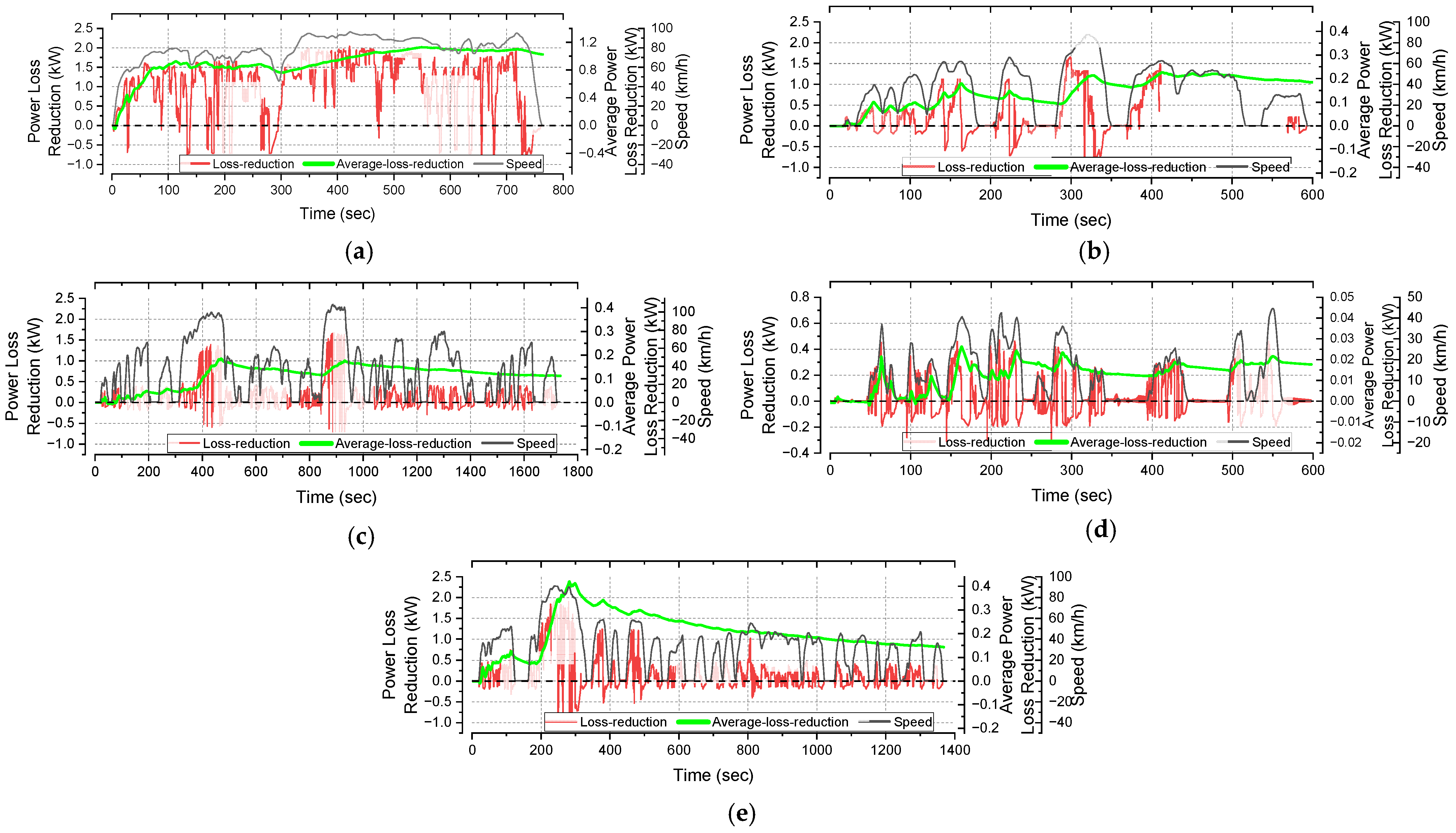
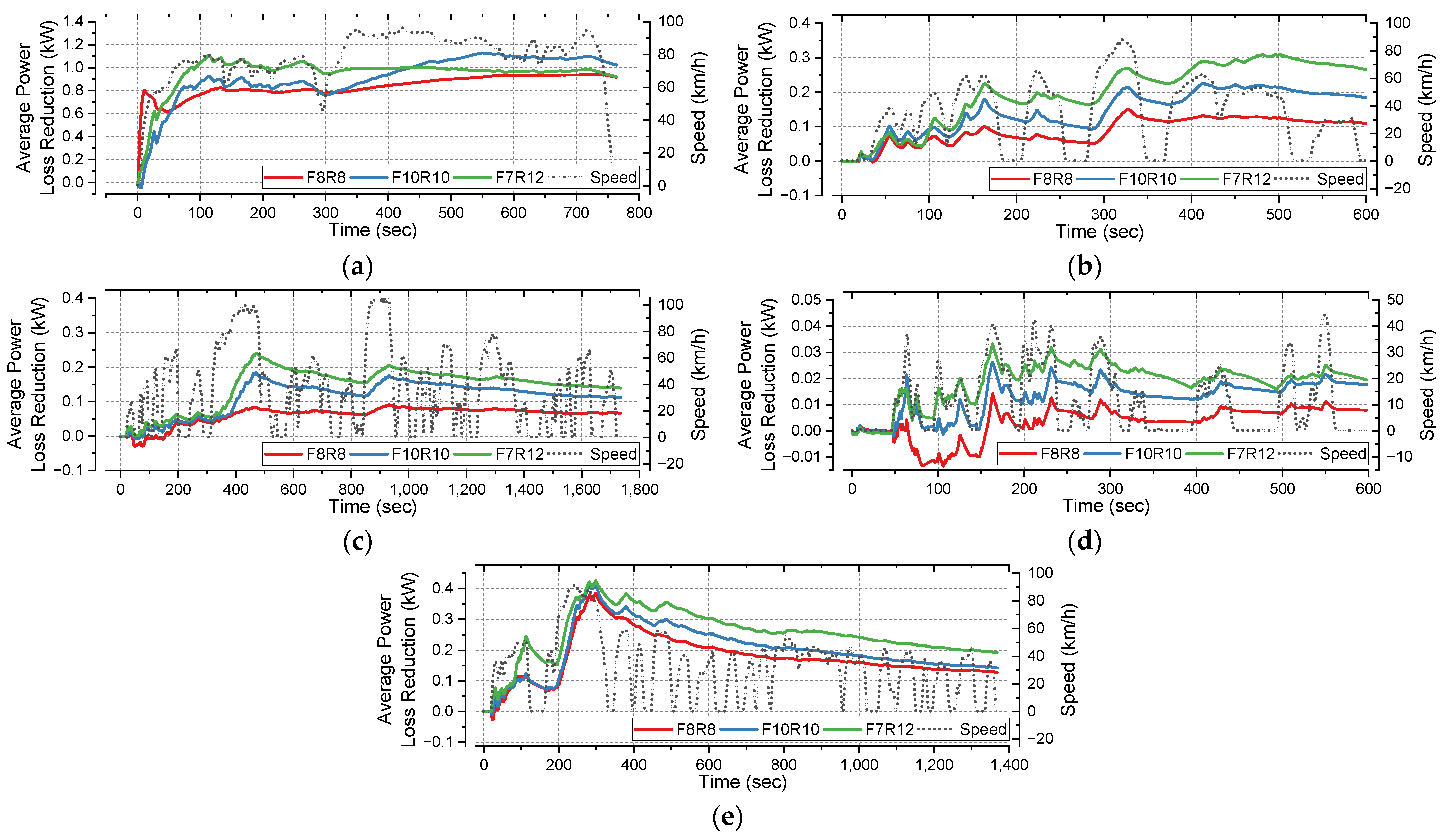
4.3. TMS Performance Verification through Loss Power Comparison
5. Discussion
5.1. Vehicle Applicability
5.2. Powertrain Efficiency
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Conway, G.; Joshi, A.; Leach, F.; García, A.; Senecal, P.K. A review of current and future powertrain technologies and trends in 2020. Engineering 2021, 5, 100080. [Google Scholar] [CrossRef]
- Zarazua de Rubens, G. Who will buy electric vehicles after early adopters? Using machine learning to identify the electric vehicle mainstream market. Energy 2019, 172, 243–254. [Google Scholar] [CrossRef]
- Krings, A.; Monissen, C. Review and Trends in Electric Traction Motors for Battery Electric and Hybrid Vehicles. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]
- Bazzi, A.M.; Krein, P.T. Review of methods for real-time loss minimization in induction machines. IEEE Trans. Ind. Appl. 2010, 46, 2319–2328. [Google Scholar] [CrossRef]
- De Santiago, J.; Bernhoff, H.; Ekergård, B.; Eriksson, S.; Ferhatovic, S.; Waters, R.; Leijon, M. Electrical motor drivelines in commercial allelectric vehicles: A review. IEEE Trans. Veh. Technol. 2012, 61, 475–484. [Google Scholar] [CrossRef] [Green Version]
- Press Release A6 e-Tron. Available online: https://www.audi-mediacenter.com (accessed on 22 February 2022).
- Electrified GV70, pr-Center. Available online: https://www.genesis.com (accessed on 22 February 2022).
- Cybertruck. Available online: https://electrek.co/guides/tesla-cybertruck/ (accessed on 22 February 2022).
- Damanauskas, V.; Janulevičius, A. Differences in tractor performance parameters between single-wheel 4WD and dual-wheel 2WD driving systems. J. Terramech 2015, 60, 63–73. [Google Scholar] [CrossRef]
- Keller, A.; Aliukov, S. Rational Criteria for Power Distribution in All-Wheel-Drive Trucks; SAE Technical Paper 2015-01-2786; Commercial Vehicle; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Shao, L.; Karci, A.E.H.; Tavernini, D.; Sorniotti, A.; Cheng, M. Design approaches and control strategies for energy efficient electric machines for electric vehicles—A review. IEEE Access 2020, 8, 116900–116913. [Google Scholar] [CrossRef]
- De Novellis, L.; Sorniotti, A.; Gruber, P. Wheel torque distribution criteria for electric vehicles with torque-vectoring differentials. IEEE Trans. Veh. Technol. 2014, 63, 1593–1602. [Google Scholar] [CrossRef] [Green Version]
- De Novellis, L.; Sorniotti, A.; Gruber, P. Optimal wheel torque distribution for a four-wheel-drive fully electric vehicle. SAE Int. J. Passeng. Cars Mech. Syst. 2013, 6, 128–136. [Google Scholar] [CrossRef]
- Dizqah, A.M.; Lenzo, B.; Sorniotti, A.; Gruber, P.; Fallah, S.; de Smet, J. A fast and parametric torque distribution strategy for four-wheel-drive energy-efficient electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 4367–4376. [Google Scholar] [CrossRef] [Green Version]
- Cao, K.; Hu, M.; Wang, D.; Qiao, S.; Guo, C.; Fu, C.; Zhou, A. All-wheel-drive torque distribution strategy for electric vehicle optimal efficiency considering tire slip. IEEE Access 2021, 9, 25245–25257. [Google Scholar] [CrossRef]
- Pennycott, A.; de Novellis, L.; Sabbatini, A.; Gruber, P.; Sorniotti, A. Reducing the motor power losses of a four-wheel drive, fully electric vehicle via wheel torque allocation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 830–839. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Gao, S.; Wang, K.; Wang, Y.; Wang, Q. Wheel torque distribution optimization of four-wheel independent-drive electric vehicle for energy efficient driving. Control Eng. Pract. 2021, 110, 104779. [Google Scholar] [CrossRef]
- U.S. Environmental Protection Agency. Fuels and Fuel Additives, Renewable Fuel Standard. Available online: http://www.epa.gov/otaq/fuels/renewablefuels (accessed on 22 February 2022).
- Burress, T.; Campbell, S. Benchmarking EV and HEV Power Electronics and Electric Machines. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 16–19 June 2013. [Google Scholar]
- Burress, T.A.; Campbell, S.L.; Coomer, C. Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System; Tech. Rep. TM-2010-253; Oak Ridge Nat. Lab.: Oak Ridge, TN, USA, 2011. [Google Scholar]
- Jung, H.; Kim, D.; Lee, C.B.; Ahn, J.; Jung, S.Y. Numerical and experimental design validation for adaptive efficiency distribution compatible to frequent operating range of IPMSM. IEEE Trans. Magn. 2014, 50, 881–884. [Google Scholar] [CrossRef]
- Chae, W.C.; Bum, K.K.; Kim, J.S.; Moon, S.H.; Cho, H.J.; Kim, Y.H.; Kim, K.N. Optimized Design to Improve the Efficiency of Driving Motors for Electric Vehicles and Reduce Costs. In Proceedings of the KSAE 2016 Annual Spring Conference, Jeju, Korea, 19–21 May 2016. [Google Scholar]
- Shao, L.; Navaratne, R.; Popescu, M.; Liu, G. Design and construction of axial-flux permanent magnet motors for electric propulsion applications—A review. IEEE Access 2021, 9, 158998–159017. [Google Scholar] [CrossRef]
- Momen, F.; Rahman, K.; Son, Y.; Savagian, P. Electric motor design of general motors’ Chevrolet bolt electric vehicle. SAE Int. J. Altern. Powertrains 2016, 5, 286–293. [Google Scholar] [CrossRef]
- Stockman, K.; Dereyne, S.; Vanhooydonck, D.; Symens, W.; Lemmens, J.; Deprez, W. ISO Efficiency Contour Measurement Results for Variable Speed Drives. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010. [Google Scholar]
- Article 25, Regulation for Structure and Facility Standard of Roads, Road Act, Republic of Korea. Available online: https://www.law.go.kr/법령/도로의구조ㆍ시설기준에관한규칙/(20211213,00922,20211213)/제25조 (accessed on 22 February 2022).
- Park, J.S.; Kim, J.H.; Chul, C.S.; Joo, D.H. Analysis of speeding characteristics using data from red light and speed enforcement cameras. J. Korean Soc. Transp. 2016, 34, 29–42. [Google Scholar] [CrossRef]
- ISO 26262:2018; Road Vehicles—Functional Safety. ISO: Geneva, Switzerland, 2018.
- Autosar Classic platfrom. Available online: https://www.autosar.org/standards/classic-platform (accessed on 22 February 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Length/width/height (mm) | 3868/1889/1314 |
| Sprung mass (kg) | 1434 |
| Drive | Four wheel Drive |
| Powertrain | Electric 120 kW (60 kW × 2) |
| Motor type | Permanent Magnet Synchronous |
| Maximum motor speed (rpm) | 13,000 |
| Maximum motor torque (Nm) | 200 |
| Maximum Road Grade (%) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Design Speed (km/h) | Highway | Arterial Road | Collection and Connecting Road | Local Road | ||||
| Flat | Mountain | Flat | Mountain | Flat | Mountain | Flat | Mountain | |
| 120 | 3 | 4 | ||||||
| 110 | 3 | 5 | ||||||
| 100 | 3 | 5 | 3 | 6 | ||||
| 90 | 4 | 6 | 4 | 6 | ||||
| 80 | 4 | 6 | 4 | 7 | 6 | 9 | ||
| 70 | 5 | 7 | 7 | 10 | ||||
| 60 | 5 | 8 | 7 | 10 | 7 | 13 | ||
| 50 | 5 | 8 | 7 | 10 | 7 | 14 | ||
| 40 | 6 | 9 | 7 | 11 | 7 | 15 | ||
| 30 | 7 | 12 | 8 | 16 | ||||
| 20 | 8 | 16 | ||||||
| Drive Cycle | Gear Ratio | Power Loss (kW) | |||
|---|---|---|---|---|---|
| Drive Mode | Case 1 | Case 2 | Case 3 | ||
| HWFET | TMS (Reduction ratio) | 0.920 (−49.2%) | 1.145 (−47.18%) | 0.920 (−56.34%) | |
| Conventional | 1.820 | 2.168 | 2.108 | ||
| SC03 | TMS (Reduction ratio) | 0.413 (−21.09%) | 0.165 (−27.91%) | 0.396 (−40.23%) | |
| Conventional | 0.523 | 0.229 | 0.662 | ||
| NYCC | TMS (Reduction ratio) | 0.077 (−3.65%) | 0.074 (−7.76%) | 0.209 (−12.34%) | |
| Conventional | 0.080 | 0.081 | 0.238 | ||
| LA92 | TMS (Reduction ratio) | 0.279 (−19.25%) | 0.320 (−25.97%) | 0.264 (−34.84%) | |
| Conventional | 0.345 | 0.433 | 0.405 | ||
| UDDS | TMS (Reduction ratio) | 0.396 (−24.37%) | 0.333 (−25.20%) | 0.378 (−33.84%) | |
| Conventional | 0.523 | 0.446 | 0.571 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-W.; Amarnathvarma, A.; Kim, E.; Hwang, M.-H.; Kim, K.; Kim, H.; Choi, I.; Cha, H.-R. A Novel Torque Matching Strategy for Dual Motor-Based All-Wheel-Driving Electric Vehicles. Energies 2022, 15, 2717. https://doi.org/10.3390/en15082717
Kim H-W, Amarnathvarma A, Kim E, Hwang M-H, Kim K, Kim H, Choi I, Cha H-R. A Novel Torque Matching Strategy for Dual Motor-Based All-Wheel-Driving Electric Vehicles. Energies. 2022; 15(8):2717. https://doi.org/10.3390/en15082717
Chicago/Turabian StyleKim, Hyeon-Woo, Angani Amarnathvarma, Eugene Kim, Myeong-Hwan Hwang, Kyoungmin Kim, Hyunwoo Kim, Iksu Choi, and Hyun-Rok Cha. 2022. "A Novel Torque Matching Strategy for Dual Motor-Based All-Wheel-Driving Electric Vehicles" Energies 15, no. 8: 2717. https://doi.org/10.3390/en15082717