
Aerodynamic Performance and Wake Flow of Crosswind Kite Power Systems

 ,
,
Abstract
:1. Introduction
2. Computational Fluid Dynamic Model
2.1. Theoretical Background
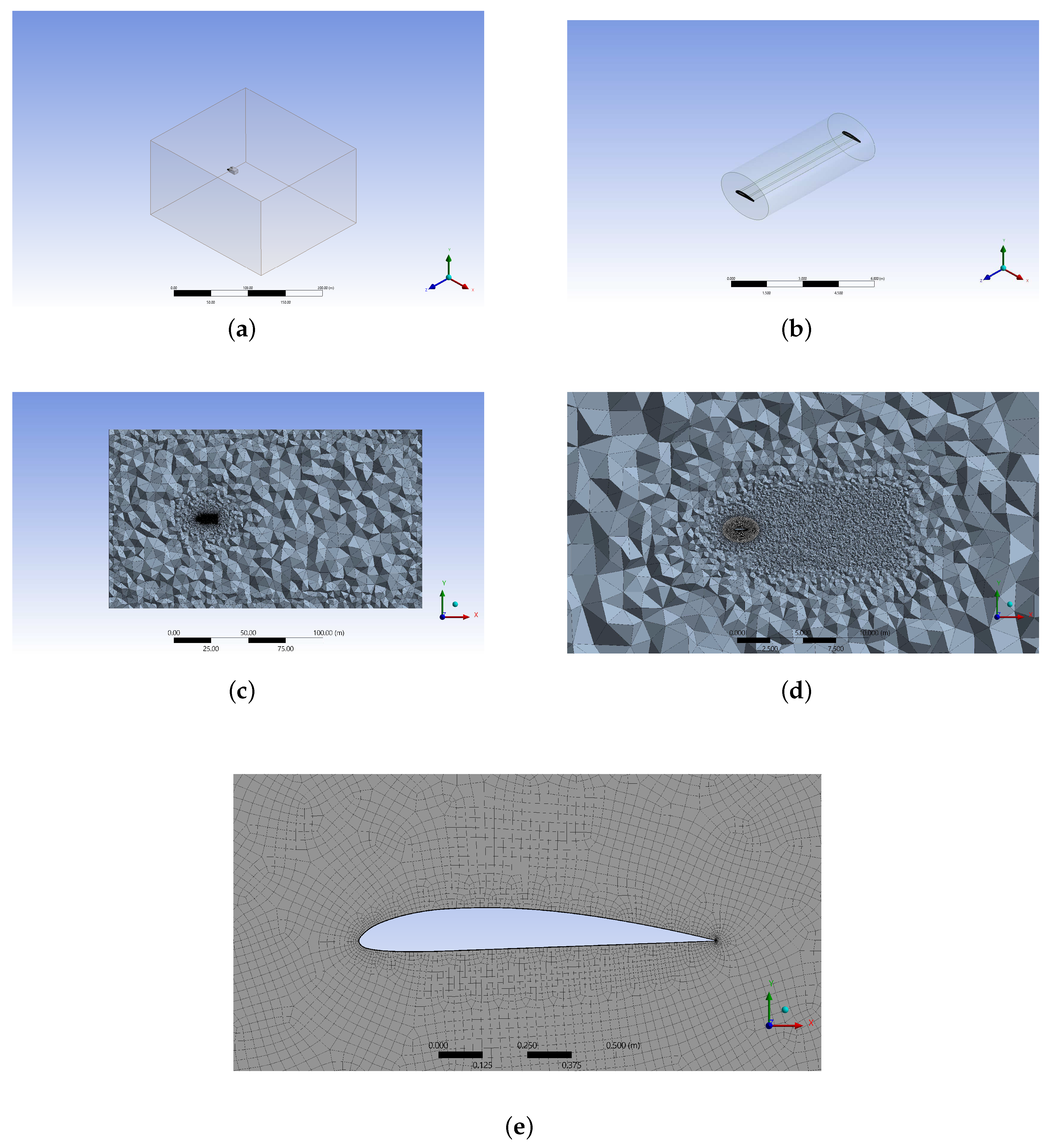
2.2. CFD Simulation Set-Up
2.3. Results and Discussion
2.3.1. Induction Factor
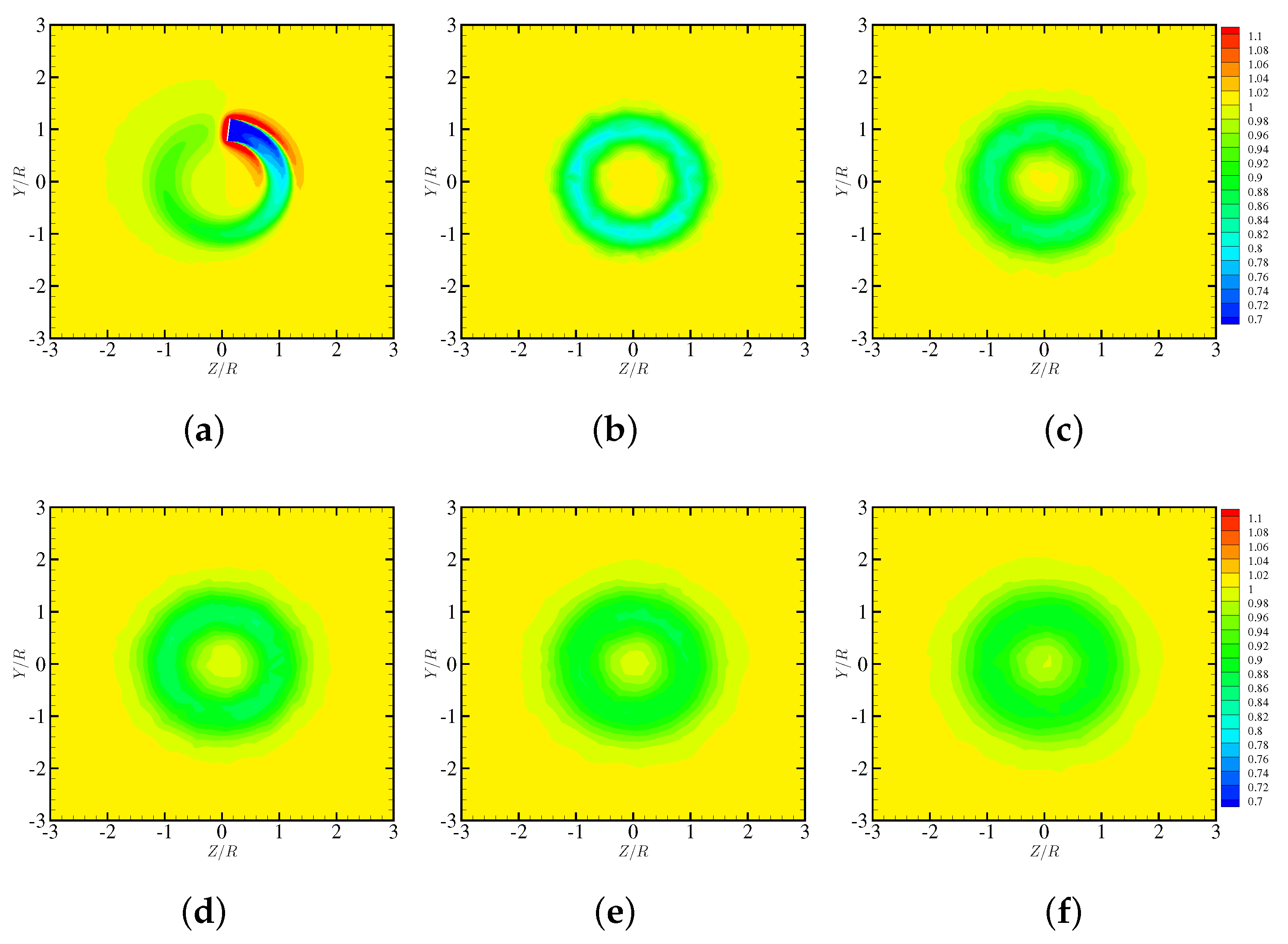
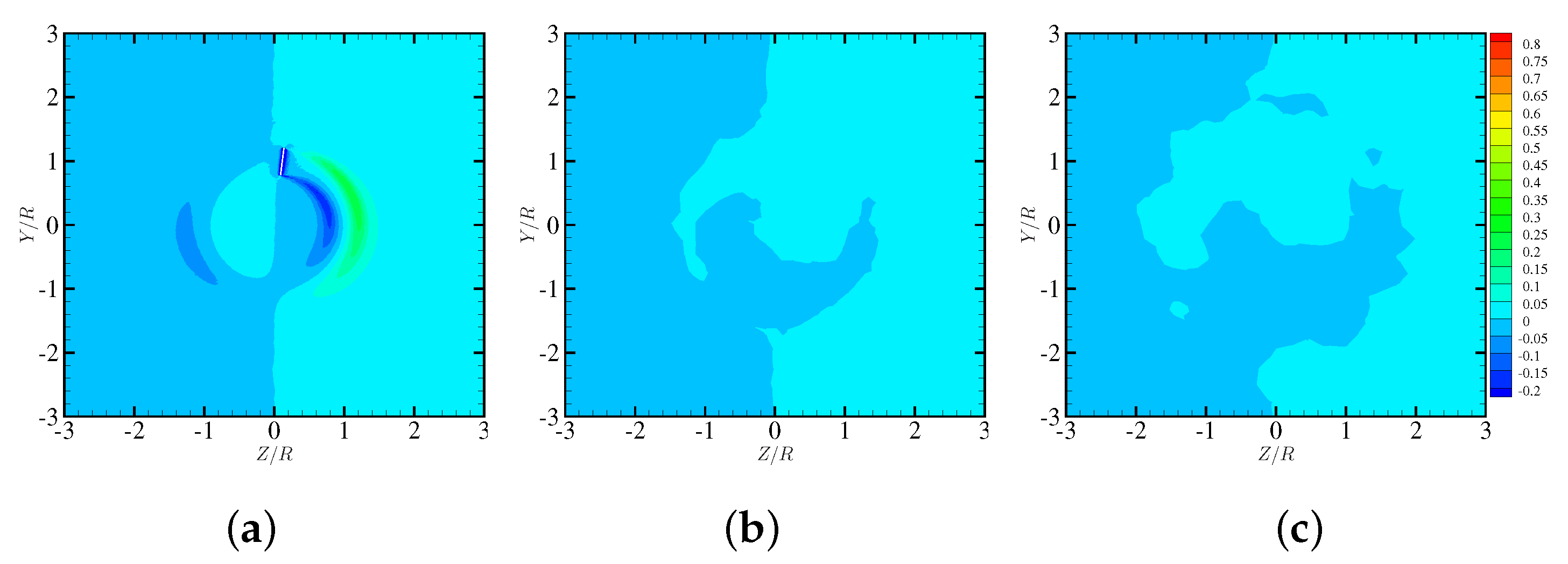
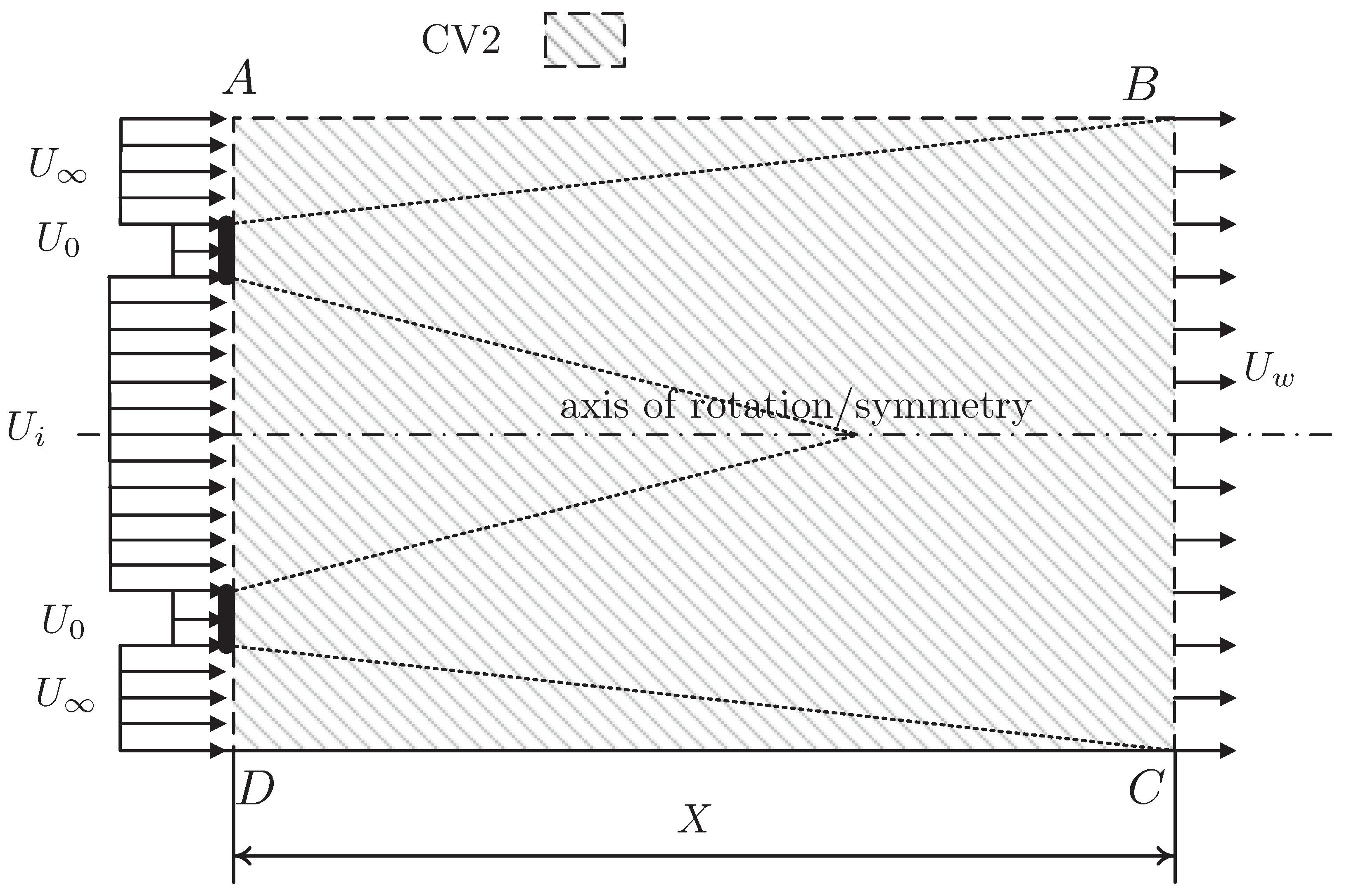
2.4. Wake Flow
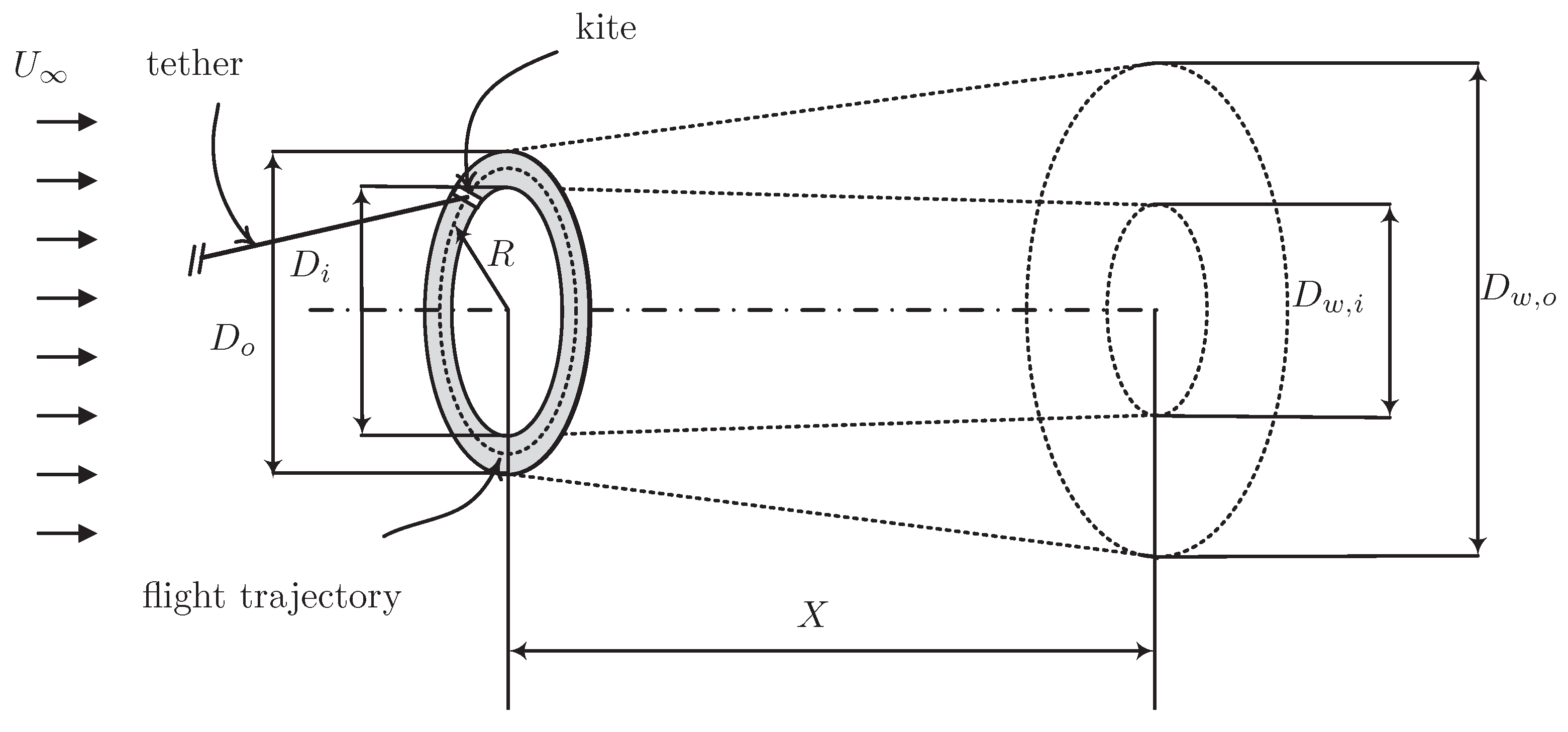
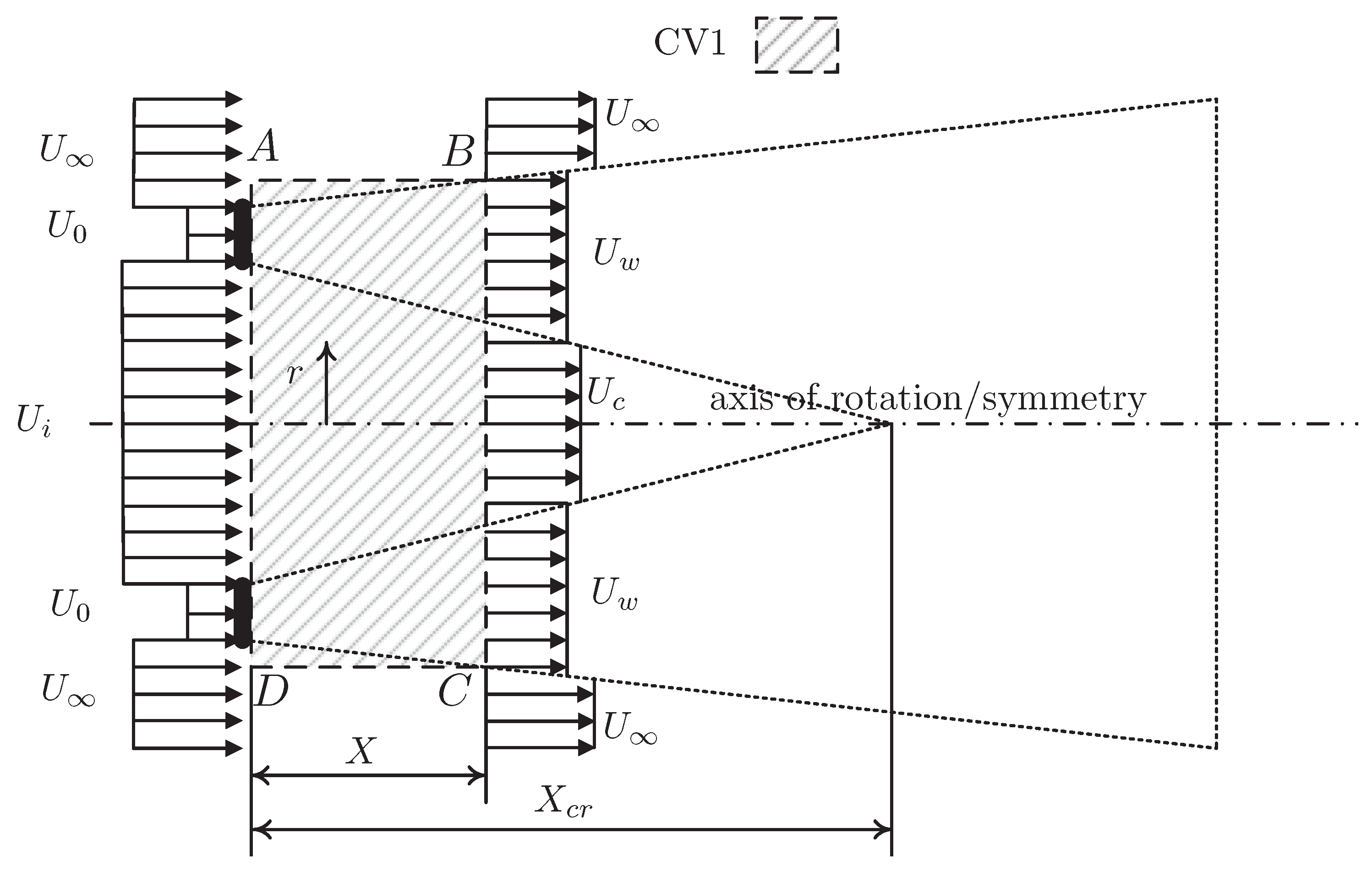
3. A Simple Analytical Wake Model
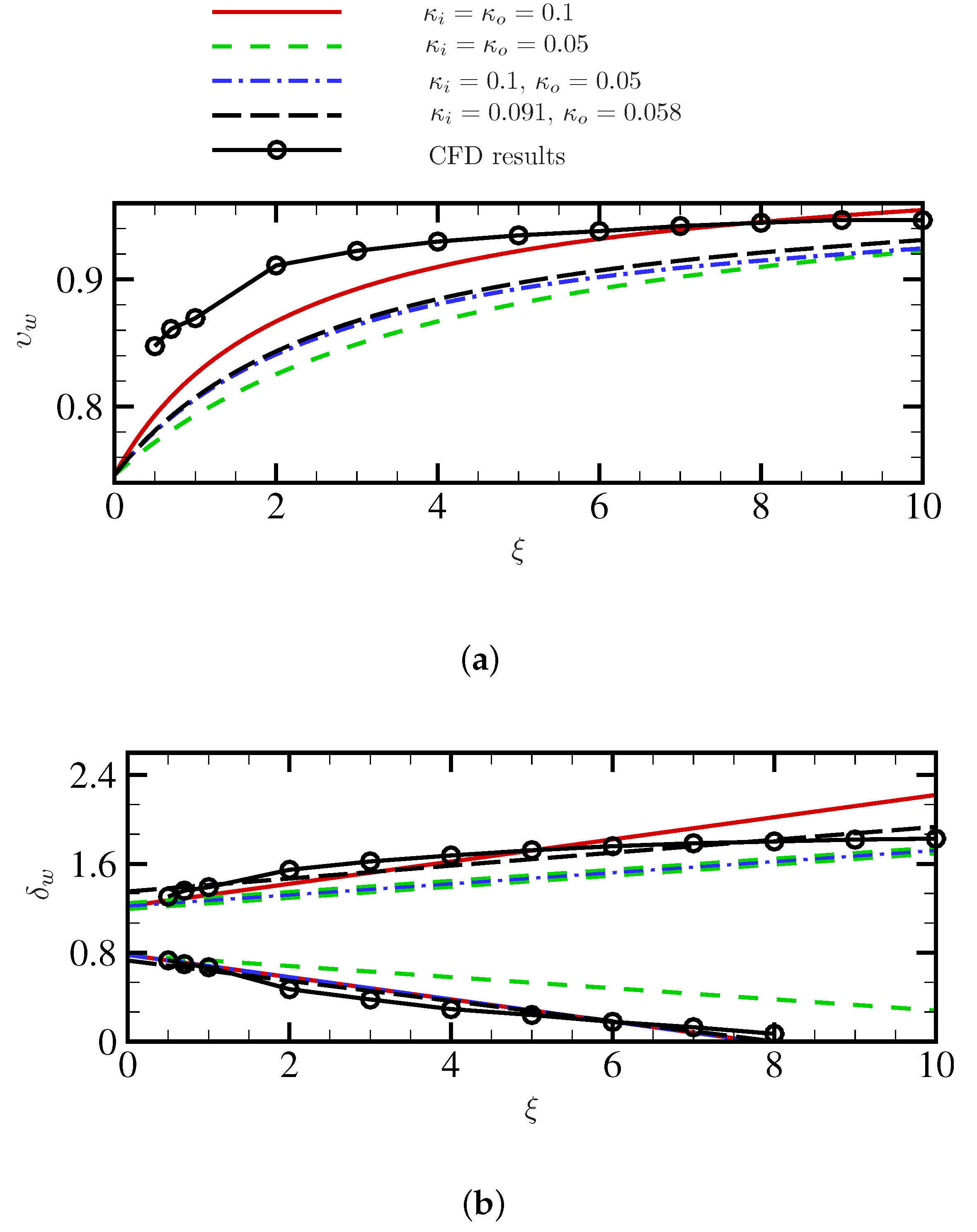
4. Comparison between CFD and Analytical Results
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. 2-D Airfoil CFD Simulation


Appendix B. 3-D Wing CFD Simulation


Appendix C. Deviation from the Conservation of Momentum
References
- Loyd, M.L. Crosswind Kite Power. J. Energy (AIAA) 1980, 4, 106–111. [Google Scholar] [CrossRef]
- Fagiano, L.; Milanese, M. Airborne wind energy: An overview. In Proceedings of the American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 3132–3143. [Google Scholar]
- Ahrens, U.; Diehl, M.; Schmehl, R. (Eds.) Airborne Wind Energy; Springer: Berlin, Germany, 2013. [Google Scholar]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne wind energy systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef] [Green Version]
- Schmehl, R. (Ed.) Airborne Wind Energy; Springer: Singapore, 2018. [Google Scholar]
- Kheiri, M.; Nasrabad, V.S.; Bourgault, F. A new perspective on the aerodynamic performance and power limit of crosswind kite systems. J. Wind. Eng. Ind. Aerodyn. 2019, 190, 190–199. [Google Scholar] [CrossRef]
- Zanon, M.; Gros, S.; Meyers, J.; Diehl, M. Airborne wind energy: Airfoil-airmass interaction. IFAC Proc. Vol. 2014, 47, 5814–5819. [Google Scholar] [CrossRef] [Green Version]
- Leuthold, R.; Gros, S.; Diehl, M. Induction in optimal control of multiple-kite airborne wind energy systems. IFAC PapersOnLine 2017, 50, 153–158. [Google Scholar] [CrossRef]
- Kheiri, M.; Bourgault, F.; Nasrabad, V.S. Power limit for crosswind kite systems. In Proceedings of the International Symposium on Wind and Tidal Power (ISWTP), Montréal, QC, Canada, 28–30 May 2017. [Google Scholar]
- De Lellis, M.; Reginatto, R.; Saraiva, R.; Trofino, A. The Betz limit applied to airborne wind energy. Renew. Energy 2018, 127, 32–40. [Google Scholar] [CrossRef]
- Kheiri, M.; Bourgault, F.; Nasrabad, V.S.; Victor, S. On the aerodynamic performance of crosswind kite power systems. J. Wind. Eng. Ind. Aerodyn. 2018, 181, 1–13. [Google Scholar] [CrossRef]
- Kheiri, M.; Victor, S.; Bourgault, F. Advances in Aerodynamic Modelling of Crosswind Kite Power Systems. In Proceedings of the Abstracts of Airborne Wind Energy Conference (AWEC) 2019, Glasgow, UK, 15–16 October 2019. [Google Scholar]
- Gaunaa, M.; Forsting, A.M.; Trevisi, F. An engineering model for the induction of crosswind kite power systems. J. Phys. Conf. Ser. 2020, 1618, 032010. [Google Scholar] [CrossRef]
- Fagiano, L. Control of Tethered Airfoils for High-Altitude Wind Energy Generation. Ph.D. Thesis, Politecnico di Torino, Turin, Italy, 2009. [Google Scholar]
- Faggiani, P.; Schmehl, R. Design and economics of a pumping kite wind park. In Airborne Wind Energy; Springer Nature Singapore Pte Ltd.: Singapore, 2018; pp. 391–411. [Google Scholar]
- Haas, T.; Meyers, J. Comparison study between wind turbine and power kite wakes. Proc. J. Phys. Conf. Ser. 2017, 854, 012019. [Google Scholar] [CrossRef] [Green Version]
- Kheiri, M.; Nasrabad, V.S.; Victor, S.; Bourgault, F. A Wake Model for Crosswind Kite Systems. In Proceedings of the Abstracts of Airborne Wind Energy Conference (AWEC) 2017, Freiburg, Germany, 5–6 October 2017. [Google Scholar]
- Haas, T.; De Schutter, J.; Diehl, M.; Meyers, J. Wake characteristics of pumping mode airborne wind energy systems. J. Phys. Conf. Ser. 2019, 1256, 012016. [Google Scholar] [CrossRef] [Green Version]
- Haas, T.; De Schutter, J.; Diehl, M.; Meyers, J. Investigation of Airborne Wind Energy Farm Performance for Different Operation Modes Using Large Eddy Simulation. In Proceedings of the Abstracts of Airborne Wind Energy Conference (AWEC) 2019, Glasgow, UK, 15–16 October 2019. [Google Scholar]
- Jensen, N.O. A Note on Wind Generator Interaction; Technical Report Risoe-M-2411(EN); Risø National Laboratory: Roskilde, Denmark, 1983.
- Katic, I.; Højstrup, J.; Jensen, N.O. A simple model for cluster efficiency. In Proceedings of the European Wind Energy Association Conference and Exhibition, Rome, Italy, 7–9 October 1986; Volume 1, pp. 407–410. [Google Scholar]
- Larsen, G.C. A Simple Wake Calculation Procedure; Risø National Laboratory: Roskilde, Denmark, 1988.
- Frandsen, S.; Barthelmie, R.; Pryor, S.; Rathmann, O.; Larsen, S.; Højstrup, J.; Thøgersen, M. Analytical modelling of wind speed deficit in large offshore wind farms. Wind. Energy 2006, 9, 39–53. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Tian, L.; Zhu, W.; Shen, W.; Zhao, N.; Shen, Z. Development and validation of a new two-dimensional wake model for wind turbine wakes. J. Wind. Eng. Ind. Aerodyn. 2015, 137, 90–99. [Google Scholar] [CrossRef] [Green Version]
- Kaldellis, J.K.; Triantafyllou, P.; Stinis, P. Critical evaluation of Wind Turbines’ analytical wake models. Renew. Sustain. Energy Rev. 2021, 144, 110991. [Google Scholar] [CrossRef]
- Andersen, S.J.; Sørensen, J.N.; Ivanell, S.; Mikkelsen, R.F. Comparison of engineering wake models with CFD simulations. J. Phys. Conf. Ser. 2014, 524, 012161. [Google Scholar] [CrossRef] [Green Version]
- Crespo, A.; Hernandez, J.; Frandsen, S. Survey of modelling methods for wind turbine wakes and wind farms. Wind. Energy Int. J. Prog. Appl. Wind. Power Convers. Technol. 1999, 2, 1–24. [Google Scholar] [CrossRef]
- Vermeer, L.; Sørensen, J.N.; Crespo, A. Wind turbine wake aerodynamics. Prog. Aerosp. Sci. 2003, 39, 467–510. [Google Scholar] [CrossRef]
- Porté-Agel, F.; Bastankhah, M.; Shamsoddin, S. Wind-turbine and wind-farm flows: A review. Bound. Layer Meteorol. 2020, 174, 1–59. [Google Scholar] [CrossRef] [Green Version]
- Kaufman-Martin, S.; Naclerio, N.; May, P.; Luzzatto-Fegiz, P. An entrainment-based model for annular wakes, with applications to airborne wind energy. Wind Energy 2022, 25, 419–431. [Google Scholar] [CrossRef]
- Luzzatto-Fegiz, P. A one-parameter model for turbine wakes from the entrainment hypothesis. J. Phys. Conf. Ser. 2018, 1037, 72019. [Google Scholar] [CrossRef]
- White, F.M. Fluid Mechanics, 6th ed.; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Ding, L.; Bernitsas, M.M.; Kim, E.S. 2-D URANS vs. experiments of flow induced motions of two circular cylinders in tandem with passive turbulence control for 30,000 < Re < 105,000. Ocean. Eng. 2013, 72, 429–440. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Ansys Inc. ANSYS FLUENT 12.0 User’s Guide; Ansys Inc.: Canonsburg, PA, USA, 2009. [Google Scholar]
- Wilcox, D.C. Reassessment of the scale-determining equation for advanced turbulence models. AIAA J. 1988, 26, 1299–1310. [Google Scholar] [CrossRef]
- Sørensen, N.N.; Michelsen, J.; Schreck, S. Navier–Stokes predictions of the NREL phase VI rotor in the NASA Ames 80 ft × 120 ft wind tunnel. Wind Energy 2002, 5, 151–169. [Google Scholar] [CrossRef]
- Sørensen, J.N. General Momentum Theory for Horizontal Axis Wind Turbines; Springer International Publishing Switzerland: London, UK, 2016. [Google Scholar]
- Wang, L.; Quant, R.; Kolios, A. Fluid structure interaction modelling of horizontal-axis wind turbine blades based on CFD and FEA. J. Wind. Eng. Ind. Aerodyn. 2016, 158, 11–25. [Google Scholar] [CrossRef] [Green Version]
- Menegozzo, L.; Dal Monte, A.; Benini, E.; Benato, A. Small wind turbines: A numerical study for aerodynamic performance assessment under gust conditions. Renew. Energy 2018, 121, 123–132. [Google Scholar] [CrossRef]
- Laursen, J.; Enevoldsen, P.; Hjort, S. 3D CFD quantification of the performance of a multi-megawatt wind turbine. J. Phys. Conf. Ser. 2007, 75, 012007. [Google Scholar] [CrossRef]
- Harrison, M.; Batten, W.; Myers, L.; Bahaj, A. Comparison between CFD simulations and experiments for predicting the far wake of horizontal axis tidal turbines. IET Renew. Power Gener. 2010, 4, 613–627. [Google Scholar] [CrossRef] [Green Version]
- McLaren, K.; Tullis, S.; Ziada, S. Computational fluid dynamics simulation of the aerodynamics of a high solidity, small-scale vertical axis wind turbine. Wind Energy 2012, 15, 349–361. [Google Scholar] [CrossRef]
- Chowdhury, A.M.; Akimoto, H.; Hara, Y. Comparative CFD analysis of Vertical Axis Wind Turbine in upright and tilted configuration. Renew. Energy 2016, 85, 327–337. [Google Scholar] [CrossRef]
- Anderson, J.D. Fundamentals of Aerodynamics, 6th ed.; McGraw-Hill Education: New York, NY, USA, 2017. [Google Scholar]
- Akberali, A.F.K.; Kheiri, M.; Bourgault, F. Generalized aerodynamic models for crosswind kite power systems. J. Wind. Eng. Ind. Aerodyn. 2021, 215, 104664. [Google Scholar] [CrossRef]
- ANSYS Inc. ANSYS Meshing User’s Guide; ANSYS Inc.: Canonsburg, PA, USA, 2010. [Google Scholar]
- Larin, P.; Paraschivoiu, M.; Aygun, C. CFD based synergistic analysis of wind turbines for roof mounted integration. J. Wind. Eng. Ind. Aerodyn. 2016, 156, 1–13. [Google Scholar] [CrossRef]
- Wilson, R.E.; Lissaman, P. Applied Aerodynamics of Wind Power Machines; Oregon State University: Corvallis, OR, USA, 1974. [Google Scholar]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons: Chichester, UK, 2011. [Google Scholar]
- Okulov, V.; van Kuik, G.A. The Betz-Joukowsky limit for the maximum power coefficient of wind turbines. Int. Sci. J. Altern. Energy Ecol. 2009, 9, 106–111. [Google Scholar]
- Hansen, M.O.; Sørensen, N.N.; Sørensen, J.N.; Michelsen, J.A. Extraction of lift, drag and angle of attack from computed 3-D viscous flow around a rotating blade. In Proceedings of the 1997 European Wind Energy Conference, Dublin, Ireland, 6–9 October 1998; Irish Wind Energy Association: Dublin, Ireland, 1998; pp. 499–502. [Google Scholar]
- Johansen, J.; Sørensen, N.N. Aerofoil characteristics from 3D CFD rotor computations. Wind. Energy Int. J. Prog. Appl. Wind. Power Convers. Technol. 2004, 7, 283–294. [Google Scholar] [CrossRef]
- Frandsen, S. On the wind speed reduction in the center of large clusters of wind turbines. J. Wind. Eng. Ind. Aerodyn. 1992, 39, 251–265. [Google Scholar] [CrossRef]
- Abbott, I.H.; Von Doenhoff, A.E. Theory of Wing Sections: Including a Summary of Airfoil Data; Dover Publications Inc.: New York, NY, USA, 1959. [Google Scholar]
- Sheldahl, R.E.; Klimas, P.C. Aerodynamic Characteristics of Seven Symmetrical Airfoil Sections through 180-Degree Angle of Attack for Use in Aerodynamic Analysis of Vertical Axis Wind Turbines; Technical Report; Sandia National Labs: Albuquerque, NM, USA, 1981.
- Silverstein, A. Scale Effect on Clark Y Airfoil Characteristics from NACA Full-Scale Wind-Tunnel Tests; Technical report; Langley Memorial Aeronautical Labs: Hampton, VA, USA, 1934.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , | ||||||
|---|---|---|---|---|---|---|
| Mean (%) | STD (%) | Mean (%) | STD (%) | Mean (%) | STD (%) | |
| 2.6 | 2.4 | 15.5 | 14.6 | 7.7 | 6.2 | |
| 6.3 | 2.6 | 83.8 | 80.3 | 10.9 | 3.9 | |
| , | 5.2 | 2.2 | 15.5 | 14.6 | 10.9 | 3.9 |
| , | 4.8 | 2.4 | 13.7 | 9.5 | 3.8 | 1.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kheiri, M.; Victor, S.; Rangriz, S.; Karakouzian, M.M.; Bourgault, F. Aerodynamic Performance and Wake Flow of Crosswind Kite Power Systems. Energies 2022, 15, 2449. https://doi.org/10.3390/en15072449
Kheiri M, Victor S, Rangriz S, Karakouzian MM, Bourgault F. Aerodynamic Performance and Wake Flow of Crosswind Kite Power Systems. Energies. 2022; 15(7):2449. https://doi.org/10.3390/en15072449
Chicago/Turabian StyleKheiri, Mojtaba, Samson Victor, Sina Rangriz, Mher M. Karakouzian, and Frederic Bourgault. 2022. "Aerodynamic Performance and Wake Flow of Crosswind Kite Power Systems" Energies 15, no. 7: 2449. https://doi.org/10.3390/en15072449