
The Circulating Current Reduction Control Method for Asynchronous Carrier Phases of Parallel Connected Inverters



Abstract
:1. Introduction
2. Basic Definition for Circulating Current Reduction and Control and Analysis of the Principle of Occurrence
2.1. Definition of Circulating Currents in Parallel Inverters
2.2. High-Frequency Circulating Current Due to PWM Phase Errors during Parallel Operation
3. Proposed Carrier Phase Compensation Method
3.1. Operation Principle of Carrier Phase Control Method
3.1.1. Calculation of Zero-Sequence Circulating Currents of Inverters and Setting of Control Criterion
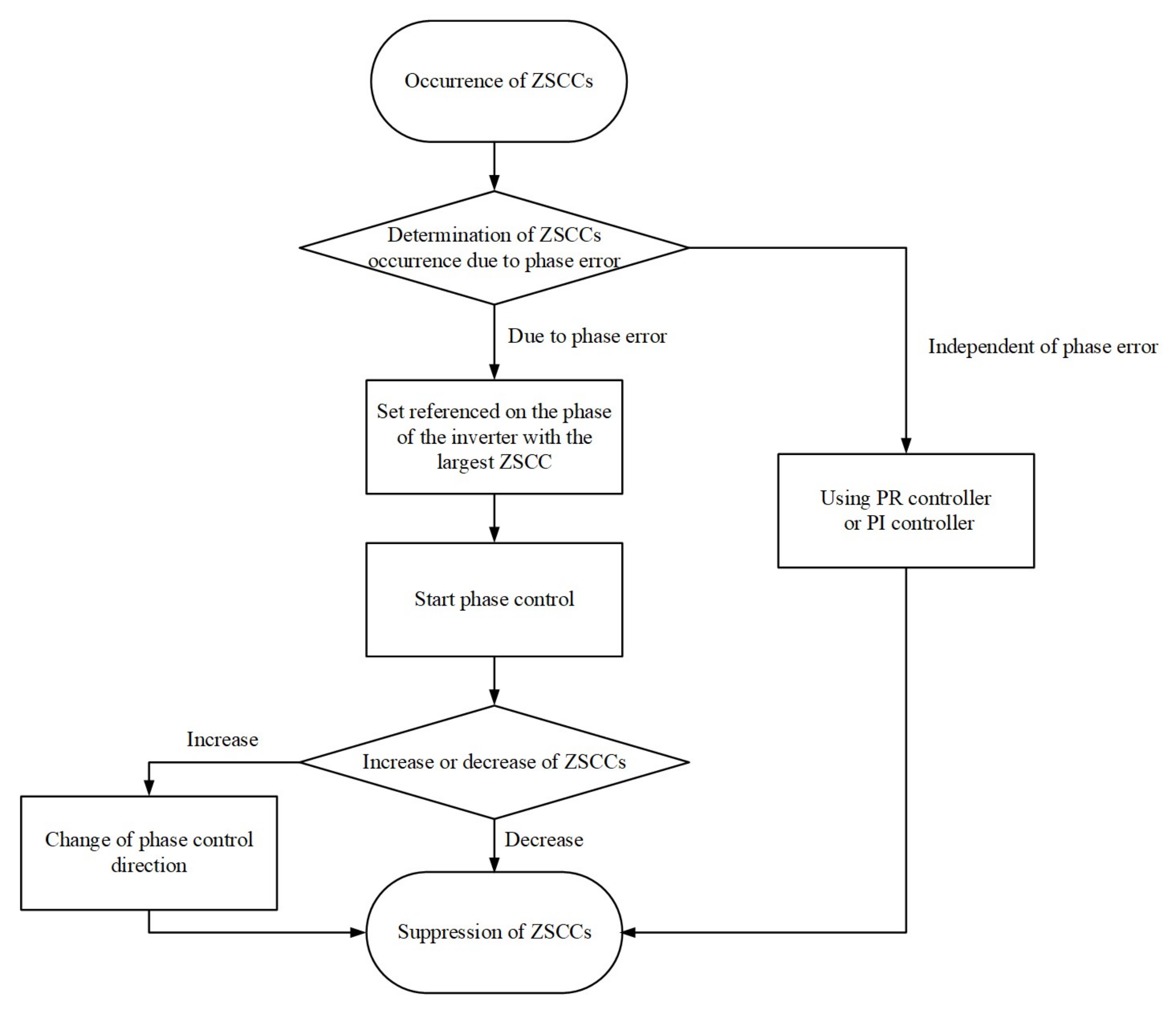
3.1.2. Carrier Phase Error Determination and Control Direction Setting
3.1.3. PWM Carrier Phase Compensation Control
3.2. Control Method When Carrier Phase Disturbance Has Occurred
3.2.1. Control Method When Phase Disturbance Occurred during Normal Operation of Parallel Inverters
3.2.2. Control Method When an Additional Disturbance Occurs during Parallel Inverter Phase Compensation Control
4. Simulation Results
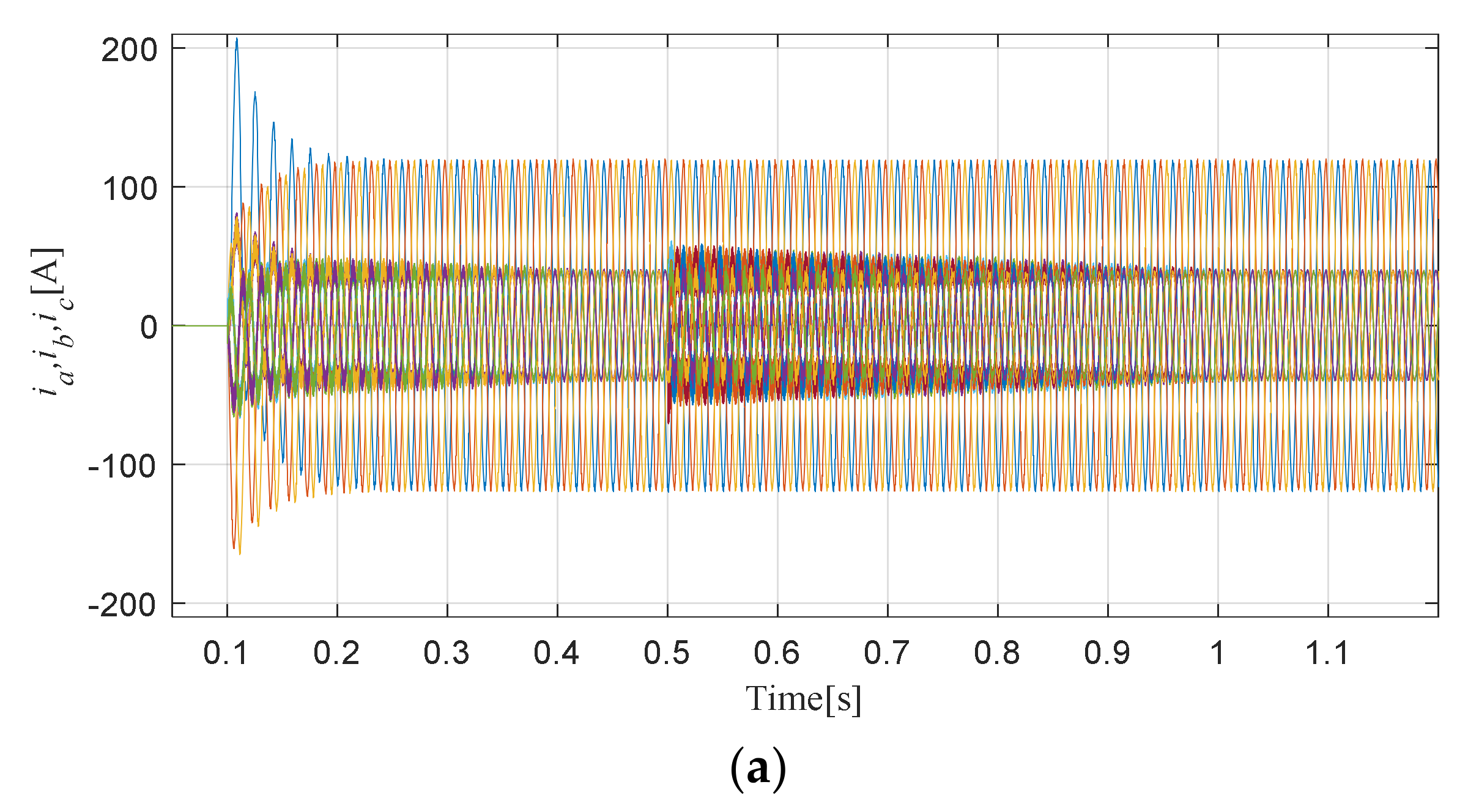
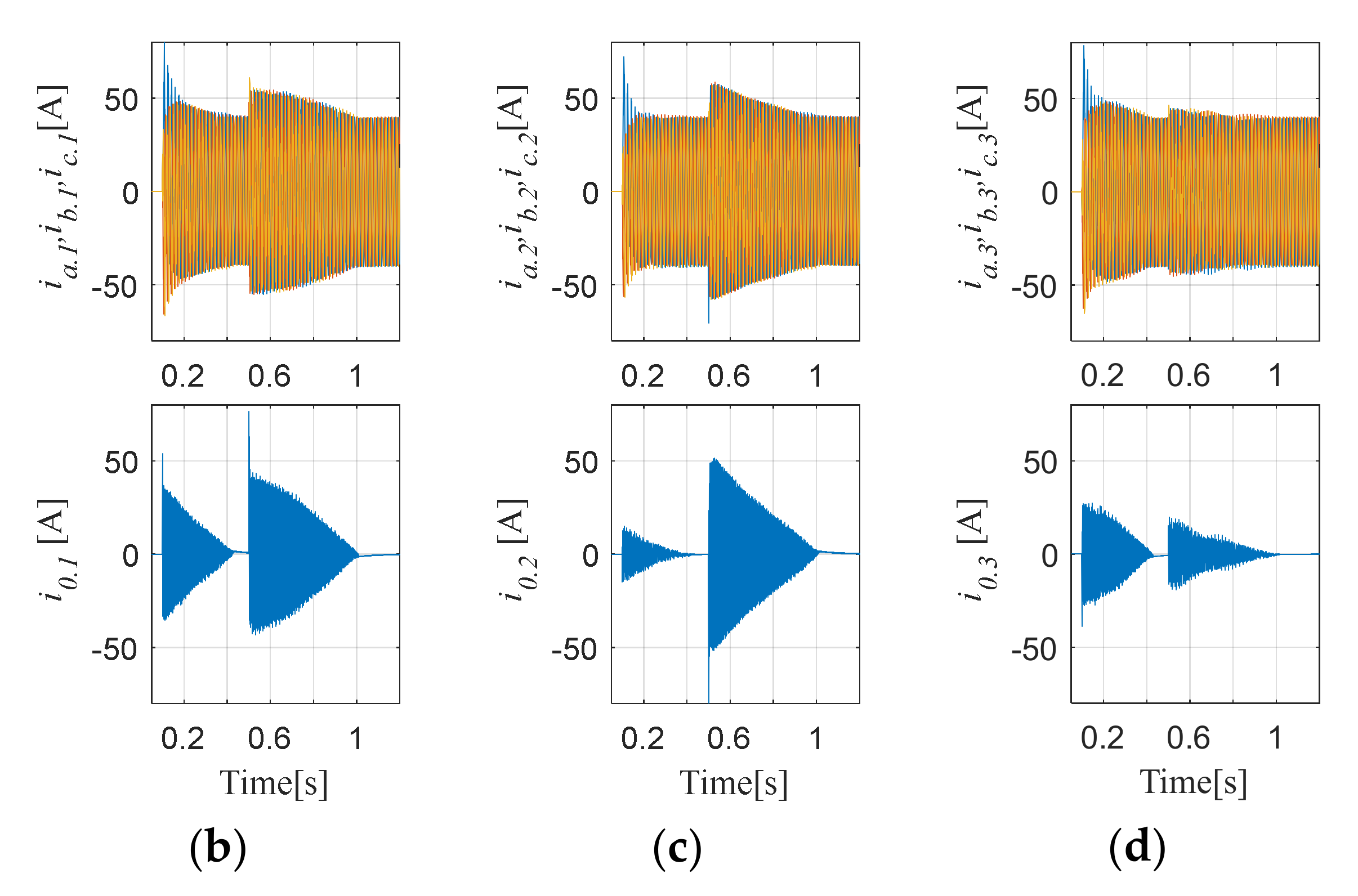
4.1. Results of Simulation of Phase Disturbance Occurring during Normal Operation
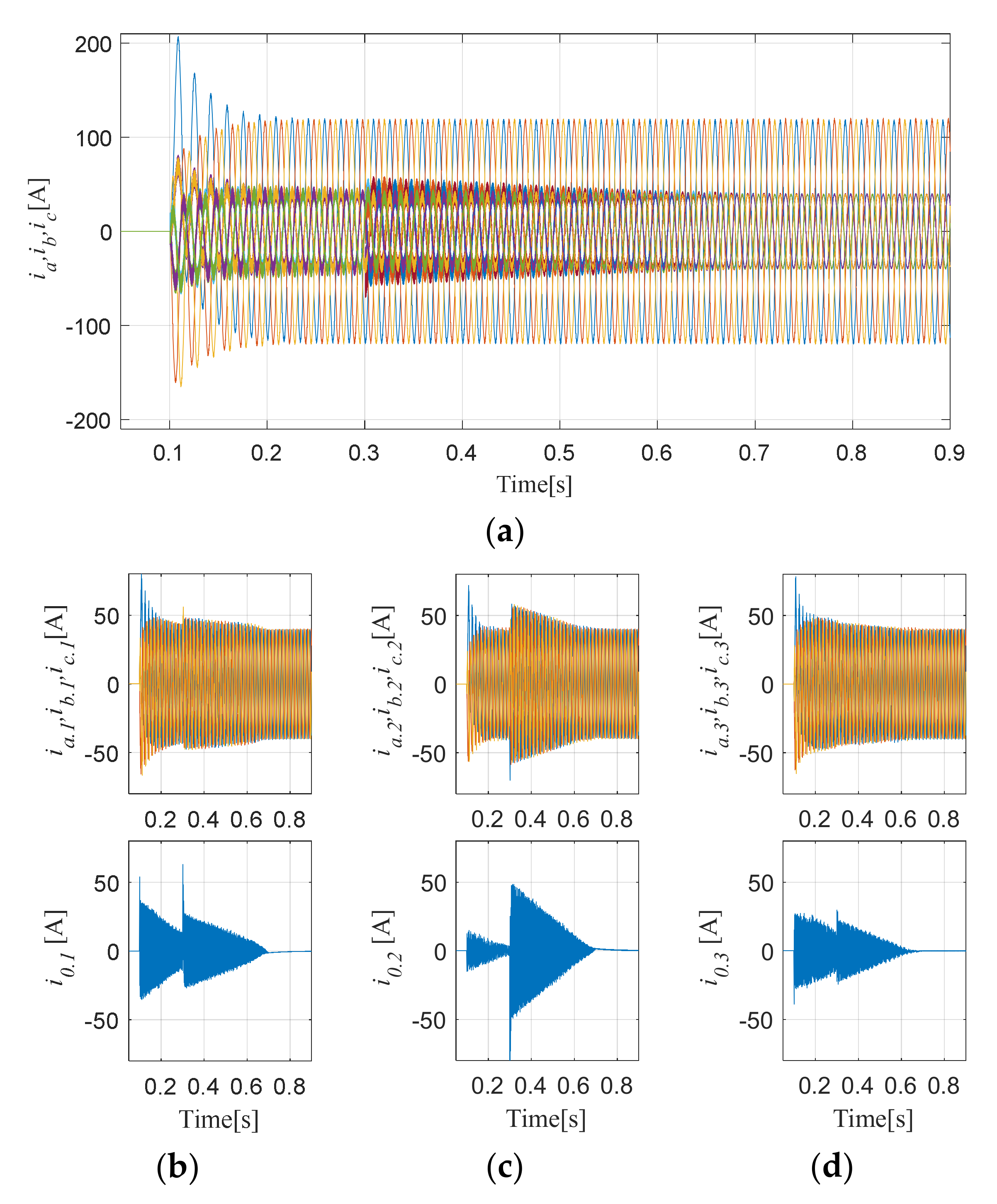
4.2. Results of Simulation of Phase Disturbance Occurring during Phase Control Operation
5. Experiment Results
5.1. Results of Experiments for Phase Disturbance during Normal Operation
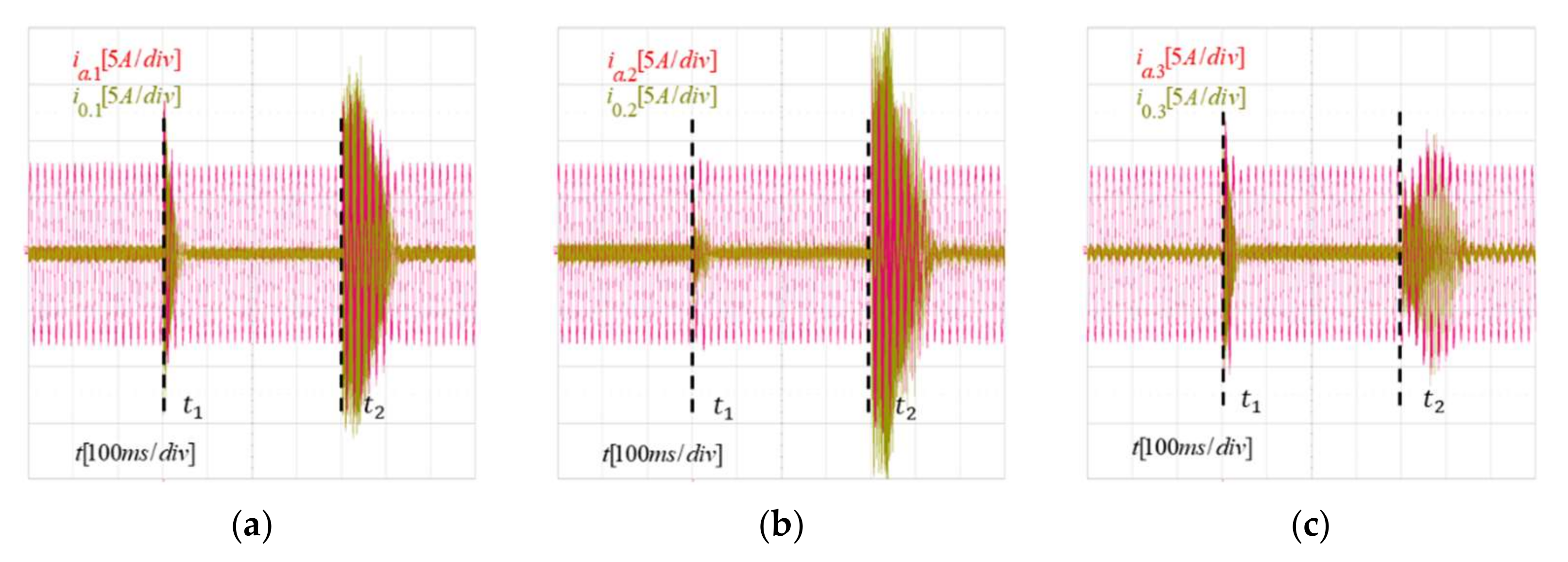
5.2. Results of Experiments for Phase Disturbance Occurring during Phase Control Operation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kjaer, S.B.; Pedersen, J.K.; Blaabjerg, F. A review of single-phase grid-connected inverters for photovoltaic modules. IEEE Trans. Ind. Appl. 2005, 41, 1292–1306. [Google Scholar] [CrossRef]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galván, E.; Portillo Guisado, R.C.; Prats, M.Á.M.; León, J.I.; Moreno-Alfonso, N. Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Wang, J.; Chang, N.C.P.; Feng, X.; Monti, A. Design of a Generalized Control Algorithm for Parallel Inverters for Smooth Microgrid Transition Operation. IEEE Trans. Ind. Electron. 2015, 62, 4900–4914. [Google Scholar] [CrossRef]
- Kawabata, T.; Higashino, S. Parallel operation of voltage source inverters. IEEE Trans. Ind. Appl. 1988, 24, 281–287. [Google Scholar] [CrossRef]
- Pan, C.T.; Liao, Y.H. Modeling and control of circulating currents for parallel three-phase boost rectifiers with different load sharing. IEEE Trans. Ind. Electron. 2008, 55, 2776–2785. [Google Scholar] [CrossRef]
- Xueguang, Z.; Li, W.; Xiao, Y.; Wang, G.; Xu, D. Analysis and Suppression of Circulating Current Caused by Carrier Phase Difference in Parallel Voltage Source Inverters with SVPWM. IEEE Trans. Power Electron. 2018, 33, 11007–11020. [Google Scholar] [CrossRef]
- Ogasawara, S.; Takagaki, J.; Akagi, H.; Nabae, A. A Novel Control Scheme of a Parallel Current-Controlled PWM Inverter. IEEE Trans. Ind. Appl. 1992, 28, 1023–1030. [Google Scholar] [CrossRef]
- Prasad, J.S.S.; Ghosh, R.; Narayanan, G. Common-mode injection PWM for parallel converters. IEEE Trans. Ind. Electron. 2015, 62, 789–794. [Google Scholar] [CrossRef]
- Cai, H.; Zhao, R.; Yang, H. Study on ideal operation status of parallel inverters. IEEE Trans. Power Electron. 2008, 23, 2964–2969. [Google Scholar] [CrossRef]
- Jung, H.S.; Sul, S.K. Decomposed current controller for a paralleled inverter with a small interfaced inductor. IEEE Trans. Power Electron. 2019, 34, 9316–9328. [Google Scholar] [CrossRef]
- Wang, J.; Hu, F.; Jiang, W.; Wang, W.; Gao, Y. Investigation of Zero Sequence Circulating Current Suppression for Parallel Three-Phase Grid-Connected Converters Without Communication. IEEE Trans. Ind. Electron. 2018, 65, 7620–7629. [Google Scholar] [CrossRef]
- Kang, S.W.; Choi, S.Y.; Im, J.H.; Kim, R.Y.; Kim, S. Il Control strategy for suppression of circulating current using high-frequency voltage compensation in asynchronous carriers for modular and scalable inverter systems. IET Power Electron. 2019, 12, 3668–3674. [Google Scholar] [CrossRef]
- Hedayati, M.H.; John, V. Integrated common-mode inductor design for parallel interleaved converters. IET Power Electron. 2016, 9, 2130–2138. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, X.; Wang, C.; Sun, Z. Research on Parallel Interleaved Inverters with Discontinuous Space-Vector Modulation. Energy Power Eng. 2013, 5, 219–225. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, F.; Burgos, R.; Lai, R.; Boroyevich, D. Impact of interleaving on AC passive components of paralleled three-phase voltage-source converters. IEEE Trans. Ind. Appl. 2010, 46, 1042–1054. [Google Scholar] [CrossRef]
- Baburajan, S.; Wang, H.; Kumar, D.; Wang, Q.; Blaabjerg, F. Dc-link current harmonic mitigation via phase-shifting of carrier waves in paralleled inverter systems. Energies 2021, 14, 4229. [Google Scholar] [CrossRef]
- Ohn, S.; Phukan, R.; Dong, D.; Burgos, R.; Boroyevich, D.; Mondal, G.; Nielebock, S. Modular Filter Building Block for Modular full-SiC AC-DC Converters by an Arrangement of Coupled Inductors. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 4130–4136. [Google Scholar] [CrossRef]
- Akagi, H.; Nabae, A.; Atoh, S. Control Strategy of Active Power Filters Using Multiple Voltage-Source Pwm Converters. IEEE Trans. Ind. Appl. 1986, IA-22, 460–465. [Google Scholar] [CrossRef]
- Wang, F.; Wang, Y.; Gao, Q.; Wang, C.; Liu, Y. A Control Strategy for Suppressing Circulating Currents in Parallel-Connected PMSM Drives with Individual DC Links. IEEE Trans. Power Electron. 2016, 31, 1680–1691. [Google Scholar] [CrossRef]
- Gorijeevaram Reddy, P.K.; Dasarathan, S.; Krishnasamy, V. Investigation of adaptive droop control applied to low-voltage DC microgrid. Energies 2021, 14, 5356. [Google Scholar] [CrossRef]
- Singh, S.; Salmon, J. Multi-Level Voltage Source Parallel Inverters using Coupled Inductors. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 16–19 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Ye, Z.; Boroyevich, D.; Choi, J.Y.; Lee, F.C. Control of circulating current in two parallel three-phase boost rectifiers. IEEE Trans. Power Electron. 2002, 17, 609–615. [Google Scholar] [CrossRef] [Green Version]
- Alhasnawi, B.N.; Jasim, B.H.; Anvari-Moghaddam, A.; Blaabjerg, F. A new robust control strategy for parallel operated inverters in green energy applications. Energies 2020, 13, 3480. [Google Scholar] [CrossRef]
- Bella, S.; Chouder, A.; Djerioui, A.; Houari, A.; Machmoum, M.; Benkhoris, M.-F.; Ghedamsi, K. Circulating Currents Control for Parallel Grid-Connected Three-Phase Inverters. In Proceedings of the 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 28–31 October 2018; pp. 1–5. [Google Scholar]
- Li, R.; Xu, D. Parallel operation of full power converters in permanent-magnet direct-drive wind power generation system. IEEE Trans. Ind. Electron. 2013, 60, 1619–1629. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of inverter modules | 3 |
| Output line-to-line voltage (RMS) | 220 [V] |
| 100 [μH] | |
| 400 [V] | |
| Output frequency | 60 [Hz] |
| Switching frequency | 3 [kHz] |
| Sampling frequency | 6 [kHz] |
| Load inductance | 4 [mH] |
| Output power | 32 [kVA] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-Y.; Jung, J.-J. The Circulating Current Reduction Control Method for Asynchronous Carrier Phases of Parallel Connected Inverters. Energies 2022, 15, 1949. https://doi.org/10.3390/en15051949
Lee S-Y, Jung J-J. The Circulating Current Reduction Control Method for Asynchronous Carrier Phases of Parallel Connected Inverters. Energies. 2022; 15(5):1949. https://doi.org/10.3390/en15051949
Chicago/Turabian StyleLee, Seung-Yong, and Jae-Jung Jung. 2022. "The Circulating Current Reduction Control Method for Asynchronous Carrier Phases of Parallel Connected Inverters" Energies 15, no. 5: 1949. https://doi.org/10.3390/en15051949