
Amplitude Control of Stall-Induced Nonlinear Aeroelastic System Based on Iterative Learning Control and Unified Pitch Motion


Abstract
:1. Introduction
2. Nonlinear Dynamical System
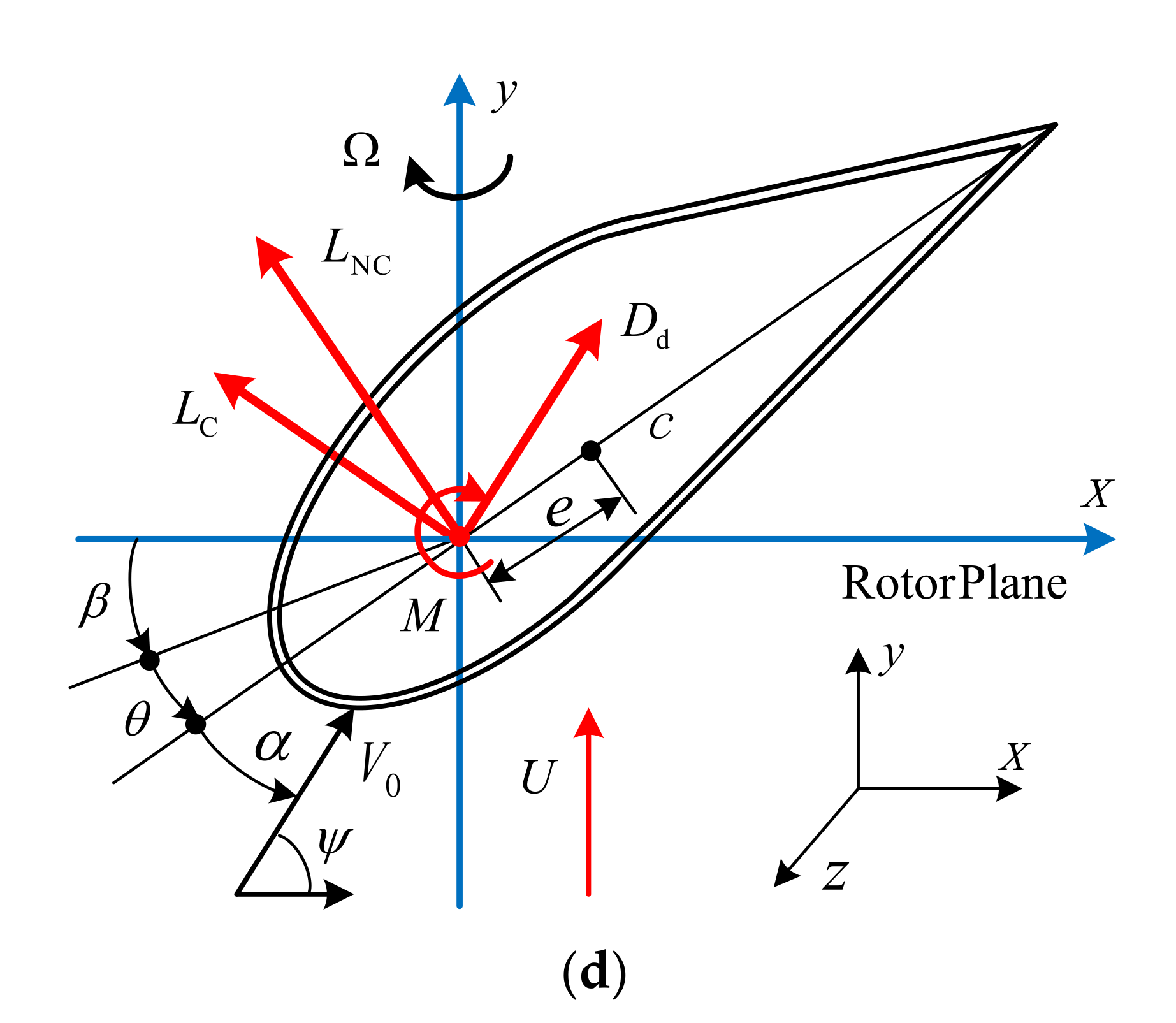
2.1. Structural Modelling and Aeroelastic System
2.2. Stall-Induced Nonlinear Aerodynamics Model
3. Amplitude Control Based on IILC
3.1. System Simplification
3.2. An Improved ILC (IILC) Algorithm Based on Residual Effect
4. Results and Discussions
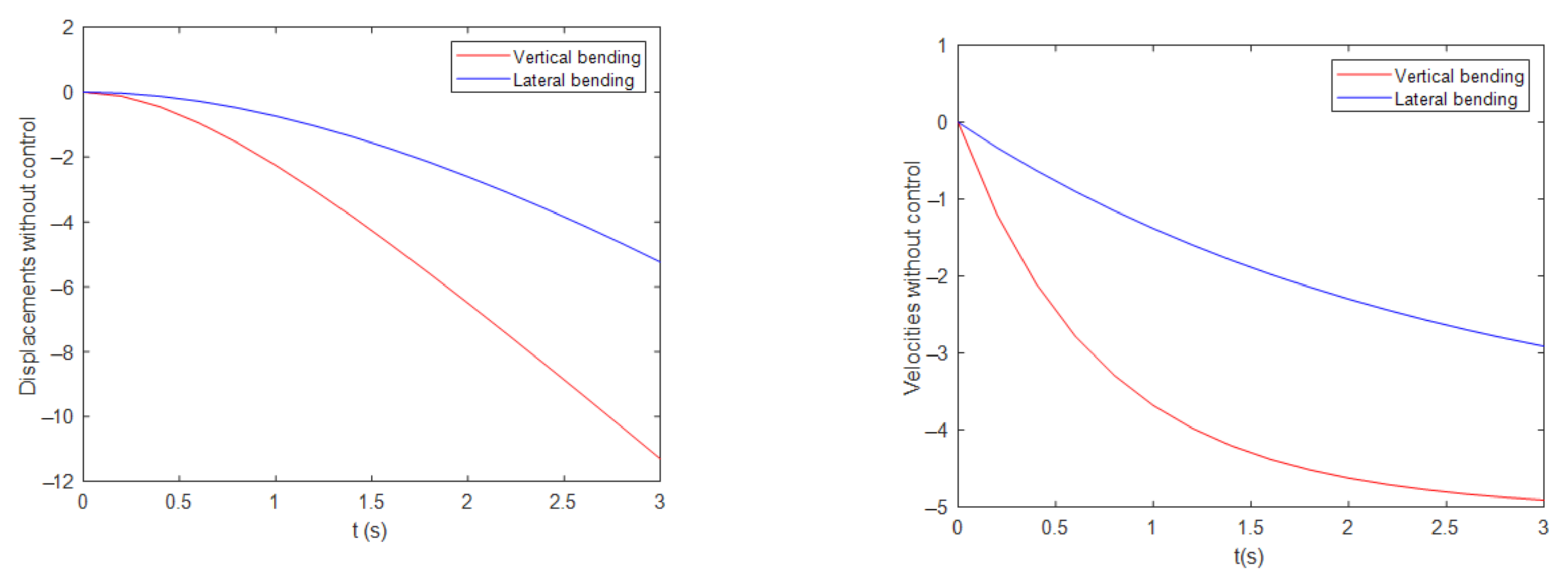
4.1. Absolutely Divergent Instability
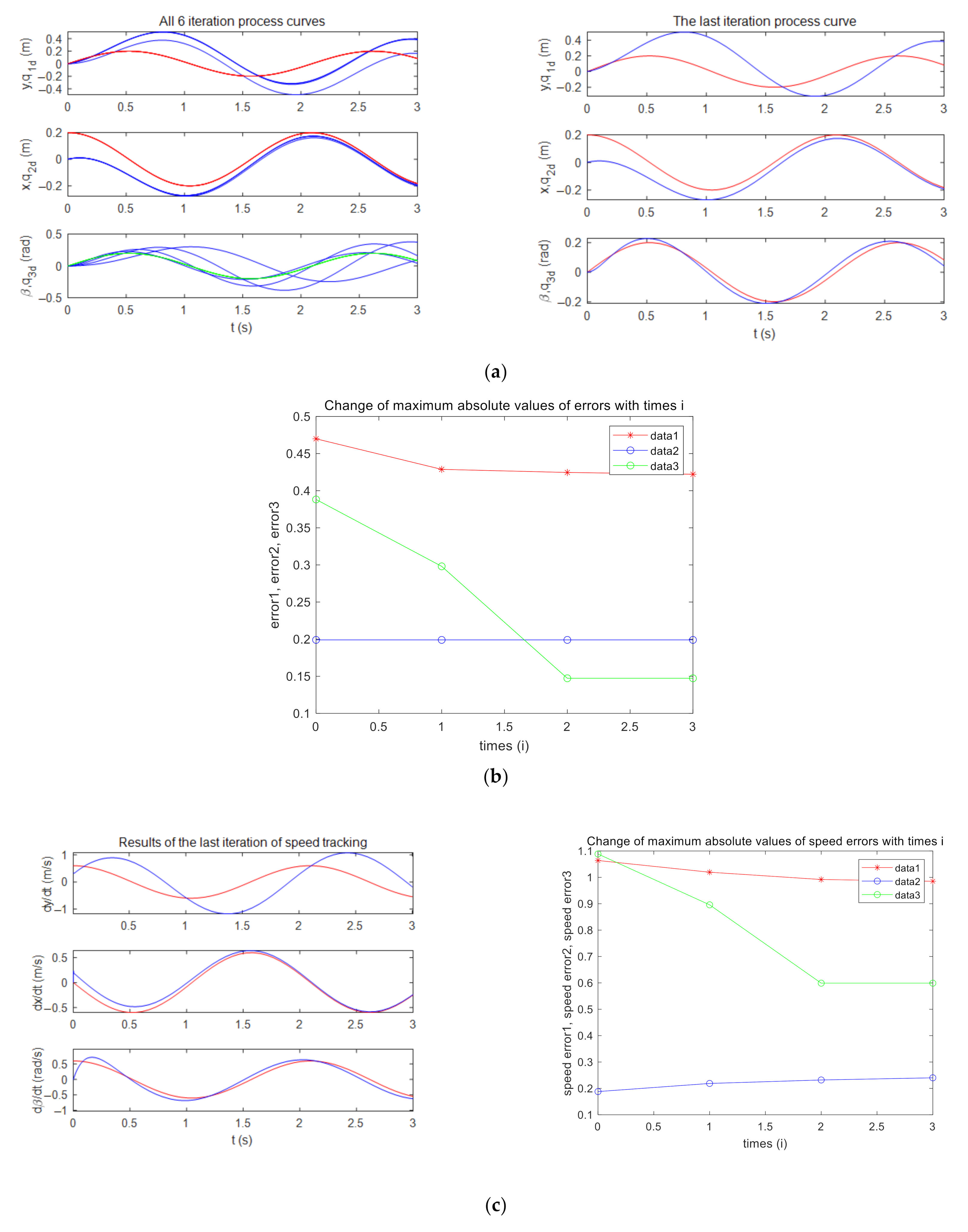
4.2. Realization of Amplitude Control by Using IILC Algorithm
4.3. Algorithm Requirements for Residual Effect
4.4. Robustness of the IILC Algorithm
5. Conclusions
- The nonlinear aeroelastic system equations are deduced. The nonlinear ISNO aerodynamic model is applied, with the nonlinear items in the ONERA model, fitted to be applied in the iterative algorithm. The validity of the residuals in the process of data fitting and the validity of the residuals in the process of the iterative algorithm operation have been tested directly or indirectly, respectively.
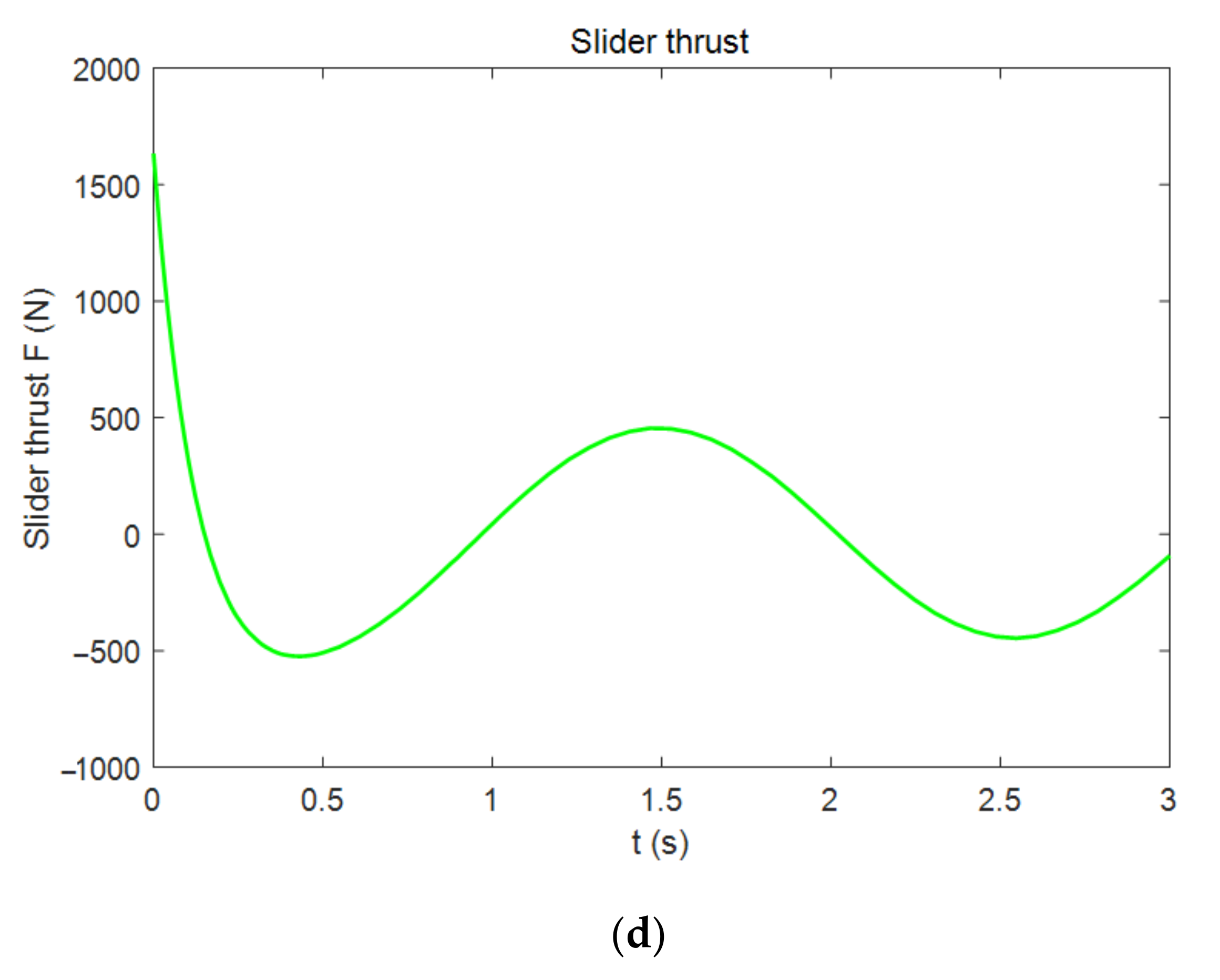
- The amplitude control of the wind turbine blade, based on unified pitch motion driven by a slider-linkage mechanism, is investigated by using the IILC algorithm that focuses on residual analysis and residual effect.
- The slider-linkage mechanism is driven by screw pod transmission. The rotation of the screw rod is driven by the stepping motor. The stability of the stepping motor movement and the maturity of real-time control are more conducive to the engineering application of the step-by-step operation of the iterative algorithm.
- Time responses of displacements and velocities, and trajectory tracking results based on the IILC algorithm are investigated. Good tracking results show the effectiveness of the IILC algorithm. Numerical simulations based on different parameters prove that the algorithm is superior in reliability and robustness.
- There are two keys to the implementation of the IILC algorithm. First, the method of fitting aerodynamic coefficients is necessary, which is the key to the smooth operation of the IILC algorithm; secondly, the simplification of the aeroelastic system is also necessary, which is the key to accelerating the IILC algorithm, so as to facilitate the engineering application of the algorithm.
- As for further development, additional study needs to be performed on different types of blades, with more realistic blade specifications and more reliable dynamic stall characteristics. Further research on stall states should be carried out; different kinds of stall states, including critical stall, mild stall, deep stall and post-stall state, should be studied to solve the nonlinear aeroelastic system, further reduce the complexity of the iterative process of solving the nonlinear system, and improve the calculation speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Mathematical Relationship between Pitch Angle β and Slider Displacement h


References
- Petot, D.; Dat, R. Unsteady aerodynamic loads on an oscillating airfoil with unstead stall. In Proceedings of the 2nd Workshop on Dynamics and Aeroelasticity Stability Modeling of Rotorcraft Systems, Florida Atlantic University, Boca Raton, FL, USA, 1987; pp. 11–23. [Google Scholar]
- Dunn, P.; Dugundji, J. Nonlinear stall flutter and divergence analysis of cantilevered graphite/epoxy wings. AIAA J. 1992, 30, 153–162. [Google Scholar] [CrossRef]
- Taehyoun, K. Nonlinear Large Amplitude Structural and Aeroelastic Behavior of Composite Rotor Blades at Large Static Deflection. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1992; pp. 82–93. [Google Scholar]
- Boutet, J.; Dimitriadis, G.; Amandolese, X. A modified Leishman–Beddoes model for airfoil sections undergoing dynamic stall at low Reynolds numbers. J. Fluids Struct. 2020, 93, 102852. [Google Scholar] [CrossRef]
- Bagherpour, T.; Li, X.; Manolas, D.; Riziotis, V. Modeling of material bend-twist coupling on wind turbine blades. Compos. Struct. 2018, 193, 237–246. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Q. Modification of Leishman–Beddoes model incorporating with a new trailing-edge vortex model. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 229, 1606–1615. [Google Scholar] [CrossRef]
- Xiaohua, L.; Guo, Z.; Dana, G.; Hou, Z. Efficient reduced-order modeling of unsteady aerodynamics under light dynamic stall conditions. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 233, 2141–2151. [Google Scholar] [CrossRef]
- Wang, X.; Kou, J.; Zhang, W. Unsteady aerodynamic modeling based on fuzzy scalar radial basis function neural networks. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5107–5121. [Google Scholar] [CrossRef]
- Samara, F.; Johnson, D.A. Deep dynamic stall and active aerodynamic modification on a S833 airfoil using pitching trailing edge flap. Wind. Eng. 2021, 45, 884–903. [Google Scholar] [CrossRef]
- Liu, T.; Gong, A.; Song, C.; Wang, Y. Sliding Mode Control of Active Trailing-Edge Flap Based on Adaptive Reaching Law and Minimum Parameter Learning of Neural Networks. Energies 2020, 13, 1029. [Google Scholar] [CrossRef] [Green Version]
- Zanotti, A.; Melone, S.; Nilifard, R.; D’Andrea, A. Experimental-numerical investigation of a pitching airfoil in deep dynamic stall. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 557–566. [Google Scholar] [CrossRef]
- Leknys, R.; Arjomandi, M.; Kelso, R.; Birzer, C. Dynamic- and post-stall characteristics of pitching airfoils at extreme conditions. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 232, 1171–1185. [Google Scholar] [CrossRef]
- Taehyoun, K.; Dugundji, J. Nonlinear large amplitude aeroelastic behavior of composite rotor blades. AIAA J. 1993, 31, 1489–1497. [Google Scholar]
- Liu, J. Robot Control System Design and MATLAB Simulation-the Advanced Design Method; Tsinghua University Press: Beijing, China, 2017; pp. 144–150. [Google Scholar]
- Liu, T.-R.; Gong, A.-L. Theoretical modeling and vibration control for pre-twisted composite blade based on LLI controller. Trans. Inst. Meas. Control 2019, 42, 1255–1270. [Google Scholar] [CrossRef]
- Schreck, S.J.; Robinson, M.C. Horizontal Axis Wind Turbine Blade Aerodynamics in Experiments and Modeling. IEEE Trans. Energy Convers. 2007, 22, 61–70. [Google Scholar] [CrossRef]
- Lei, Y.; Wang, J. Aerodynamic performance of a quadrotor MAV considering the horizontal wind. IEEE Access 2020, 8, 109421–109428. [Google Scholar] [CrossRef]
- Huang, D.; Yang, W.; Huang, T.; Qin, N.; Chen, Y.; Tan, Y. Iterative Learning Operation Control of High-Speed Trains with Adhesion Dynamics. IEEE Trans. Control Syst. Technol. 2021, 29, 2598–2608. [Google Scholar] [CrossRef]
- Xue, D.Y. Computer Aided Control Systems Design Using MATLAB Language, 3rd ed.; Tsinghua University Publishing Company: Beijing, China, 2014; pp. 383–389. [Google Scholar]
- Sharma, A.K.; Singh, D.J.; Singh, V.; Verma, N.K. Aerodynamic Modeling of ATTAS Aircraft using Mamdani Fuzzy Inference Network. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3566–3576. [Google Scholar] [CrossRef]
- Yuan, Q.; Li, C.; Yang, Y. Research on comparison of the fractal characteristics of turbulent wind. Acta Energ. Sol. Sin. 2018, 39, 2027–2035. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Values |
|---|---|---|
| ωx | Angular frequency | 18 rad s−1 |
| ωy | Angular frequency | 12 rad s−1 |
| ωθ | Angular frequency | 5π rad s−1 |
| ρb | Mass per length of blade | 50 kg m−1 |
| ICG | Rotational inertia | 10 m kg |
| U | Wind speed | 5 m s−1 |
| a | The sum of the lengths of the two connecting rods | 2 m |
| ξx | Damping ratio | 0.08 |
| ξy | Damping ratio | 0.06 |
| ξθ | Damping ratio | 0.06 |
| e | Distance between the two centers | 0.1 m |
| Ω | Angular frequency | 0.6283 rad s−1 |
| Mb | Equivalent slider mass | 120 kg |
| R | Distance from CRFCB to the center of the blade root | 0.8 m |
| Nonlinear Parts | Parameters | 95 Percent Confidence Intervals |
|---|---|---|
| ∆CL | p1 = −0.001329 | % (−0.01969, 0.01704) |
| p2 = −0.5626 | % (−0.5976, −0.5276) | |
| p3 = 0.2003 | % (0.1861, 0.2146) | |
| p4 = −0.02494 | % (−0.02771, −0.02216) | |
| p5 = 0.001236 | % (0.0009995, 0.001472) | |
| p6 = −1.86e−05 | % (−2.571 × 10−5, −1.15 × 10−5) | |
| q1 = −0.4713 | % (−0.4891, −0.4534) | |
| q2 = 0.09069 | % (0.08319, 0.09819) | |
| q3 = −0.008524 | % (−0.009628, −0.00742) | |
| q4 = 0.0003258 | % (0.0002697, 0.0003818) | |
| ∆CM | a0 = 0.03932 | % (0.03651, 0.04213) |
| a1 = −0.0357 | % (−0.04107, −0.03033) | |
| b1 = −0.02527 | % (−0.02976, −0.02078) | |
| a2 = −0.01138 | % (−0.01811, −0.004655) | |
| b2 = −0.03203 | % (−0.03688, −0.02718) | |
| a3 = 0.009252 | % (0.00298, 0.01552) | |
| b3 = −0.02015 | % (−0.02402, −0.01629) | |
| a4 = 0.01412 | % (0.01034, 0.01791) | |
| b4 = −0.0004783 | % (−0.004383, 0.003427) | |
| a5 = 0.005038 | % (0.0008763, 0.0092) | |
| b5 = 0.01216 | % (0.008025, 0.01629) | |
| a6 = −0.006258 | %(−0.01096, −0.001556) | |
| b6 = 0.0116 | % (0.005918, 0.01729) | |
| a7 = −0.009751 | % (−0.01324, −0.006259) | |
| b7 = 0.003518 | % (−0.002786, 0.009821) | |
| a8 = −0.005128 | % (−0.008551, −0.001705) | |
| b8 = −0.002258 | % (−0.006777, 0.002261) | |
| w = 3.682 | % (3.496, 3.867) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Sun, C.; Zhao, K.; Gong, A. Amplitude Control of Stall-Induced Nonlinear Aeroelastic System Based on Iterative Learning Control and Unified Pitch Motion. Energies 2022, 15, 787. https://doi.org/10.3390/en15030787
Liu T, Sun C, Zhao K, Gong A. Amplitude Control of Stall-Induced Nonlinear Aeroelastic System Based on Iterative Learning Control and Unified Pitch Motion. Energies. 2022; 15(3):787. https://doi.org/10.3390/en15030787
Chicago/Turabian StyleLiu, Tingrui, Changle Sun, Kang Zhao, and Ailing Gong. 2022. "Amplitude Control of Stall-Induced Nonlinear Aeroelastic System Based on Iterative Learning Control and Unified Pitch Motion" Energies 15, no. 3: 787. https://doi.org/10.3390/en15030787