
A Review of the Advancements in the Design of Brushless Doubly Fed Machines


Abstract
:1. Introduction
- The evolution of cascaded IMs to contemporary BDFM topologies. In this section, significant contributions to the present day BDFM topologies are highlighted, with the underlying reasons for these design developments.
- Discussions on the aspects of BDFM design. A comprehensive run-down of recent developments and approaches employed in the design of BDFMs, are presented in this section.
2. Development of BDFMs from Cascade Induction Motors
2.1. The Thompson Motor
2.2. The Lydall Motor
2.3. The Hunt Motor
2.4. The Broadway & Burbridge Motor
2.5. Cascade Systems to Brushless Doubly Fed Operations
3. Recent BDFM Design Development
3.1. Stator Winding Development
3.1.1. Relative Winding Pole Size
3.1.2. Unbalanced Magnetic Pull and Magnetic Coupling
3.1.3. Commonly Used Pole Pair Combinations
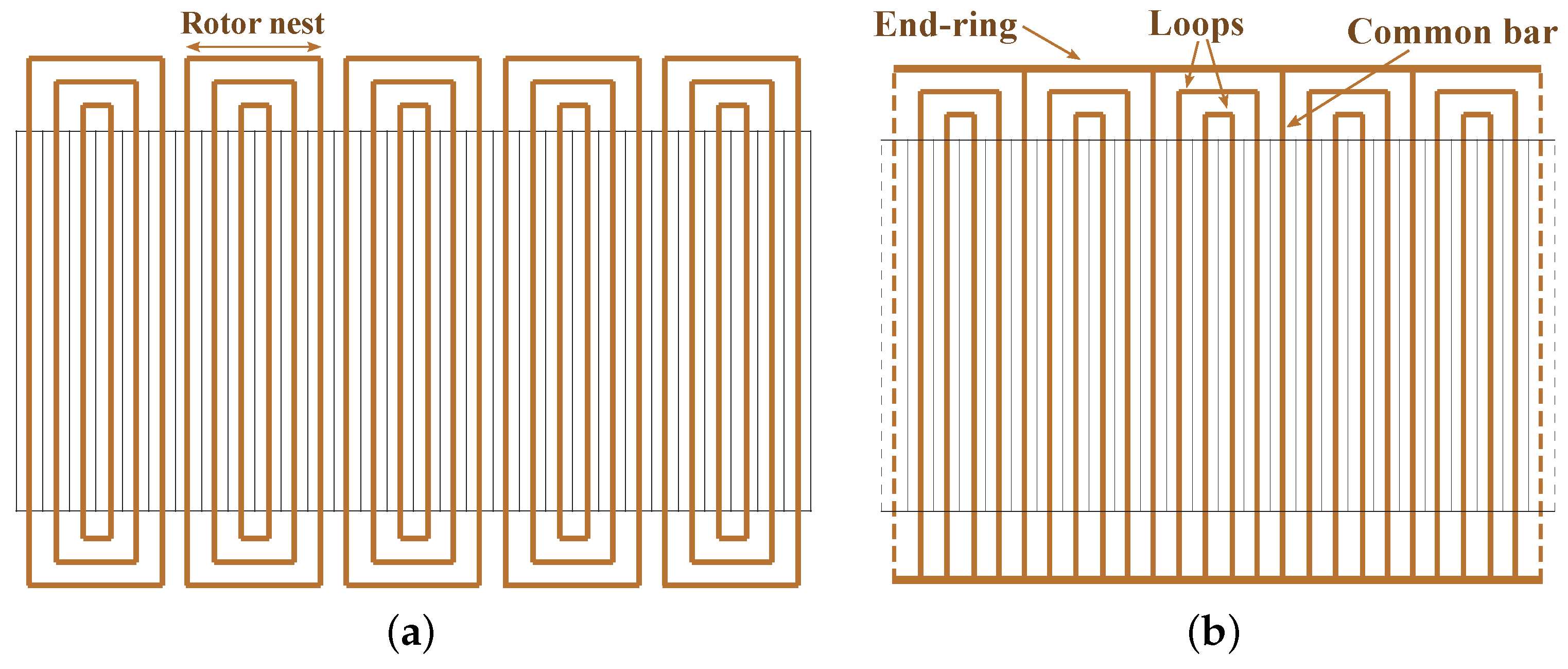
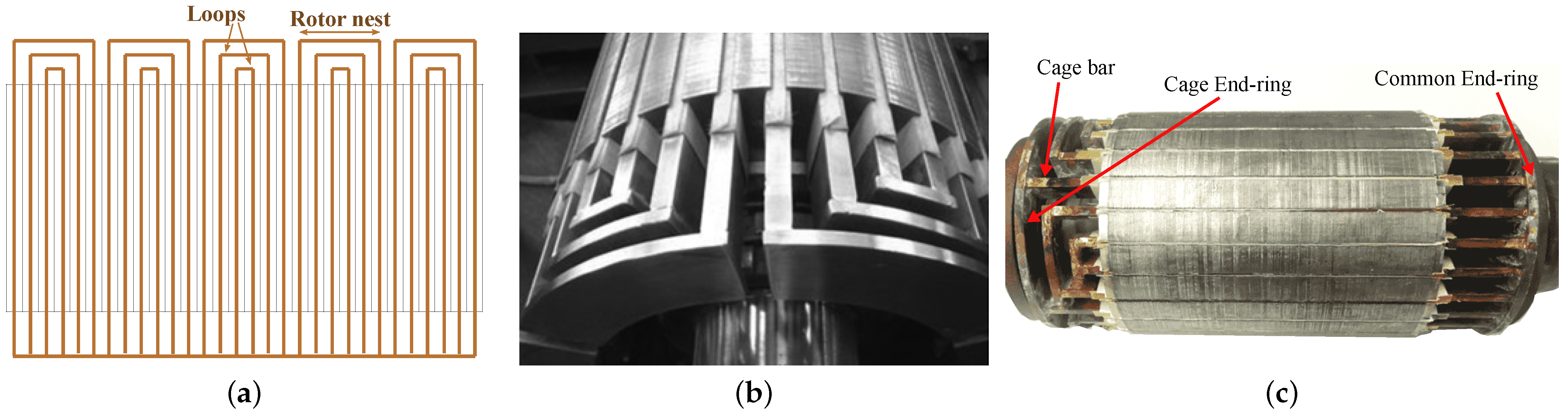
3.2. Rotor Winding Development
3.3. BDFM Sizing and Power Ratings
3.4. Vibrations and Harmonics Mitigation
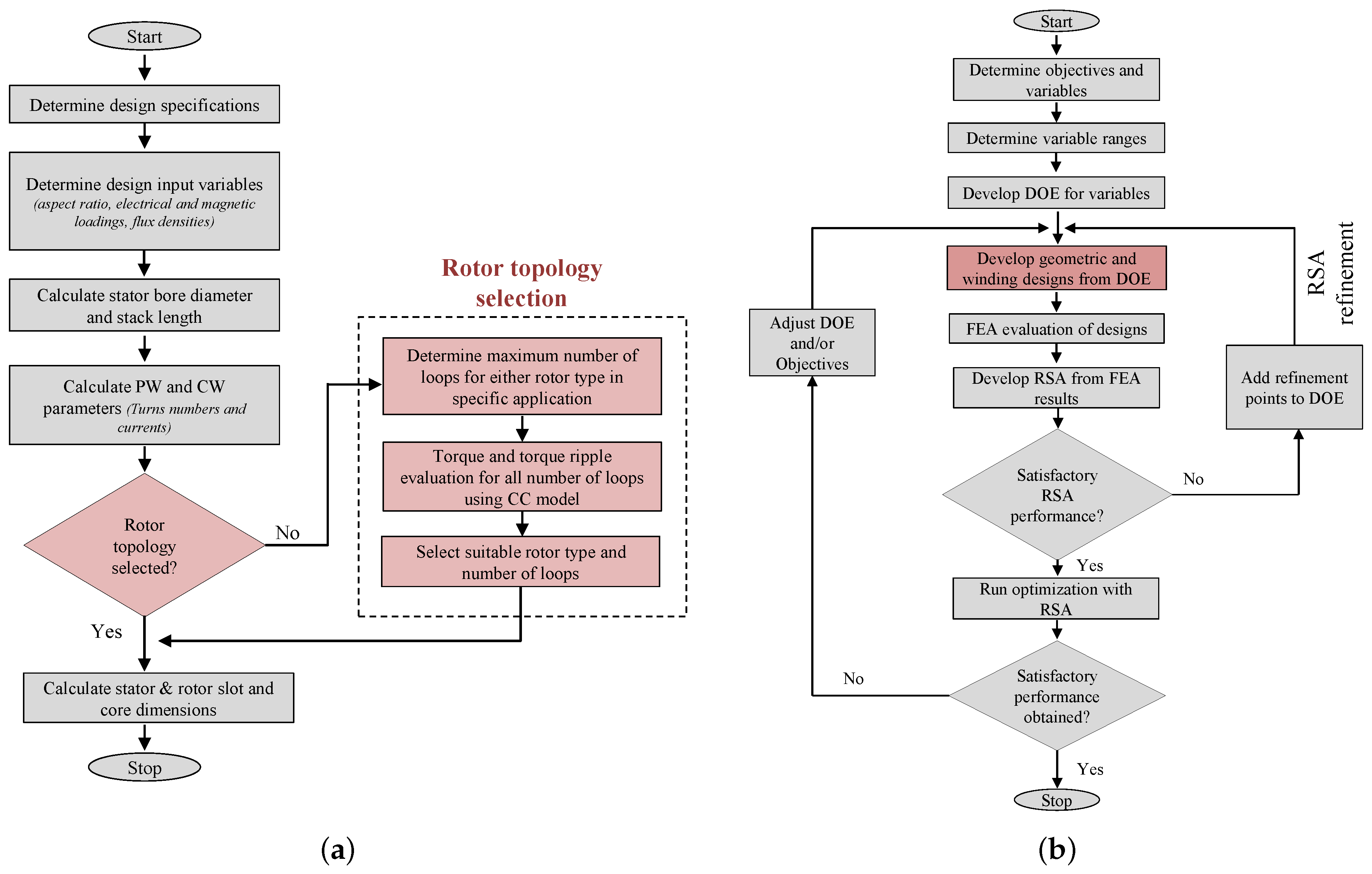
3.5. BDFM Design and Optimization Procedures
4. Conclusions and Future Research
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BDFM | Brushless doubly fed machine |
| CC | Coupled circuit |
| CW | Control winding |
| DFIG | Doubly fed induction generator |
| EEC | Electric equivalent circuit |
| FEA | Finite element analysis |
| IL | Isolated loops |
| IM | Induction machine |
| LVRT | Low voltage ride through |
| MEC | Magnetic equivalent circuit |
| NL | Nested loops |
| NSGA-II | Non dominated sorting genetic algorithm |
| O&M | Operational and maintenance |
| PW pole pairs | |
| CW pole pairs | |
| PW | Power winding |
| RSA | Response surface approximation |
| SCIM | Squirrel cage induction motor |
| SW | Series wound |
| UMP | Unbalanced magnetic pull |
References
- Polinder, H.; Ferreira, J.A.; Jensen, B.B.; Abrahamsen, A.B.; Atallah, K.; McMahon, R.A. Trends in Wind Turbine Generator Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 174–185. [Google Scholar] [CrossRef]
- Carroll, J.; McDonald, A.; Dinwoodie, I.; McMillan, D.; Revie, M.; Lazakis, I. Availability, operation and maintenance costs of offshore wind turbines with different drive train configurations. Wind Energy 2017, 20, 361–378. [Google Scholar] [CrossRef] [Green Version]
- Global Wind Energy Council (GWEC). Global Wind Report 2021; Technical Report; GWEC: Brussels, Belgium, 2021. [Google Scholar]
- Abdi, E.; Tatlow, M.R.; McMahon, R.A.; Tavner, P. Design and performance analysis of a 6 MW medium-speed Brushless DFIG. In Proceedings of the 2nd IET Renewable Power Generation Conference (RPG 2013), Beijing, China, 9–11 September 2013; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- McMahon, R.A.; Roberts, P.C.; Wang, X.; Tavner, P.J. Performance of BDFM as generator and motor. IEE Proc. Electr. Power Appl. 2006, 153, 289–299. [Google Scholar] [CrossRef] [Green Version]
- Strous, T.D.; Polinder, H.; Ferreira, J.A. Brushless doubly-fed induction machines for wind turbines: Developments and research challenges. IET Electr. Power Appl. 2017, 11, 991–1000. [Google Scholar] [CrossRef]
- Zhang, F.; Yu, S.; Wang, H.; Wang, Y.; Wang, D. Overview of research and development status of brushless doubly-fed machine system. Chin. J. Electr. Eng. 2016, 2, 1–13. [Google Scholar] [CrossRef]
- Han, P.; Cheng, M.; Ademi, S.; Jovanovic, M.G. Brushless doubly-fed machines: Opportunities and challenges. Chin. J. Electr. Eng. 2018, 4, 1–17. [Google Scholar] [CrossRef]
- Bell, L. Some Facts about Polyphase Motors. Trans. Am. Inst. Electr. Eng. 1894, 11, 559–569. [Google Scholar] [CrossRef]
- Hunt, L.J. The “cascade” induction motor. J. Inst. Electr. Eng. 1914, 52, 406–426. [Google Scholar] [CrossRef]
- Adams, A.D. Motor Speed Regulation. Trans. Am. Inst. Electr. Eng. 1899, 16, 443–445. [Google Scholar] [CrossRef]
- Scott, C.F. Variable Speed Motor Control. Trans. Am. Inst. Electr. Eng. 1902, 20, 111–114. [Google Scholar] [CrossRef]
- Siemens Brothers & Co. Ltd.; Lydall, F. Improvements in Polyphase Induction Motors. British Patent 16839, 23 July 1903. [Google Scholar]
- Hunt, L.J. A new type of induction motor. Electr. Eng. J. Inst. 1907, 39, 648–667. [Google Scholar] [CrossRef]
- Leonard, H.W. Volts vs. Ohms; Speed Regulation of Electric Motors. Trans. Am. Inst. Electr. Eng. 1896, 13, 373–386. [Google Scholar] [CrossRef] [Green Version]
- Steinmetz, C.P. Operating alternating motors. U.S. Patent 587340 A, 3 August 1897. [Google Scholar]
- Creedy, F. Some developments in multi-speed cascade induction motors. Electr. Eng. J. Inst. 1921, 59, 511–532. [Google Scholar] [CrossRef]
- Broadway, A.R.W.; Burbridge, L. Self-cascaded machine: A low-speed motor or high-frequency brushless alternator. Electr. Eng. Proc. Inst. 1970, 117, 1277–1290. [Google Scholar] [CrossRef]
- Smith, B.H. Theory and Performance of a Twin Stator Induction Machine. IEEE Trans. Power Appar. Syst. 1966, PAS-85, 123–131. [Google Scholar] [CrossRef]
- Smith, B.H. Synchronous Behavior of Doubly Fed Twin Stator Induction Machine. IEEE Trans. Power Appar. Syst. 1967, PAS-86, 1227–1236. [Google Scholar] [CrossRef]
- Wallace, A.K.; Spee, R.; Lauw, H.K. Dynamic modeling of brushless doubly-fed machines. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; pp. 329–334. [Google Scholar] [CrossRef]
- Brune, C.S.; Spee, R.; Wallace, A.K. Experimental evaluation of a variable-speed, doubly-fed wind-power generation system. IEEE Trans. Ind. Appl. 1994, 30, 648–655. [Google Scholar] [CrossRef]
- Abdi, E.; Mcmahon, R.; Malliband, P.; Shao, S.; Mathekga, M.E.; Tavner, P.; Abdi, S.; Oraee, A.; Long, T.; Tatlow, M. Performance analysis and testing of a 250 kW medium-speed brushless doubly-fed induction generator. IET Renew. Power Gener. 2013, 7, 631–638. [Google Scholar] [CrossRef]
- Rochelle, P.; Spee, R.; Wallace, A.K. The effect of stator winding configuration on the performance of brushless doubly-fed machines in adjustable speed drives. In Proceedings of the Conference Record of the 1990 IEEE Industry Applications Society Annual Meeting, Seattle, WA, USA, 7–12 October 1990; pp. 331–337. [Google Scholar] [CrossRef]
- Oraee, A.; Abdi, E.; McMahon, R.A. Converter rating optimisation for a brushless doubly fed induction generator. IET Renew. Power Gener. 2015, 9, 360–367. [Google Scholar] [CrossRef]
- McMahon, R.A.; Abdi, E.; Malliband, P.D.; Shao, S.; Mathekga, M.E.; Tavner, P.J. Design and testing of a 250 kW medium-speed Brushless DFIG. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- McMahon, R.A.; Mathekga, M.E.; Wang, X.; Tatlow, M.R. Design considerations for the brushless doubly-fed (induction) machine. IET Electr. Power Appl. 2016, 10, 394–402. [Google Scholar] [CrossRef] [Green Version]
- Rüncos, F.; Carlson, R.; Sadowski, N.; Kuo-Peng, P. Performance analysis of a doubly fed twin stator cage induction generator. In Recent Developments of Electrical Drives; Springer: Dordrecht, The Netherlands, 2006; pp. 361–373. [Google Scholar]
- Oraee, A.; McMahon, R.; Abdi, E.; Abdi, S.; Ademi, S. Influence of Pole-pair Combinations on the Characteristics of the Brushless Doubly Fed Induction Generator. IEEE Trans. Energy Convers. 2020, 35, 1151–1159. [Google Scholar] [CrossRef]
- Roberts, P.C. A Study of Brushless Doubly-Fed (Induction) Machines. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 2004. [Google Scholar]
- Roberts, P.C.; Long, T.; Mcmahon, R.A.; Shao, S.; Abdi, E.; Maciejowski, J.M. Dynamic modelling of the brushless doubly fed machine. IET Electr. Power Appl. 2013, 7, 544–556. [Google Scholar] [CrossRef]
- Kusko, A.; Somuah, C.B. Speed Control of a Single-Frame Cascade Induction Motor with Slip-Power Pump Back. IEEE Trans. Ind. Appl. 1978, IA-14, 97–105. [Google Scholar] [CrossRef]
- Gorginpour, H.; Oraee, H.; Abdi, E. Calculation of Core and Stray Load Losses in Brushless Doubly Fed Induction Generators. IEEE Trans. Ind. Electron. 2014, 61, 3167–3177. [Google Scholar] [CrossRef]
- Chapman, F. The production of noise and vibration by certain squirrel-cage induction motors. J. Inst. Electr. Eng. 1922, 61, 39–48. [Google Scholar] [CrossRef] [Green Version]
- Abdi, S.; Abdi, E.; McMahon, R. A Study of Unbalanced Magnetic Pull in Brushless Doubly Fed Machines. IEEE Trans. Energy Convers. 2015, 30, 1218–1227. [Google Scholar] [CrossRef]
- Van der Blij, N.H.; Strous, T.D.; Wang, X.; Polinder, H. A novel analytical approach and finite element modelling of a BDFIM. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 346–352. [Google Scholar] [CrossRef]
- Abdi, E.; Oraee, A.; Abdi, S.; McMahon, R.A. Design of the Brushless DFIG for optimal inverter rating. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Strous, T.D.; Wang, X.; Polinder, H.; Ferreira, J.A.B. Finite element based multi-objective optimization of a brushless Doubly-Fed Induction Machine. In Proceedings of the 2015 IEEE International Electric Machines Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 1689–1694. [Google Scholar] [CrossRef]
- Wang, X.; Strous, T.D.; Lahaye, D.; Polinder, H.; Ferreira, J.A. Modeling and Optimization of Brushless Doubly-Fed Induction Machines Using Computationally Efficient Finite-Element Analysis. IEEE Trans. Ind. Appl. 2016, 52, 4525–4534. [Google Scholar] [CrossRef]
- Wang, X.; Polinder, H.; Lahaye, D.; Ferreira, J.A. FE based multi-objective optimization of a 3.2 MW brushless doubly-fed induction machine. In Proceedings of the 2017 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Nottingham, UK, 20–21 April 2017; pp. 89–94. [Google Scholar] [CrossRef]
- Strous, T.D.; Wang, X.; Polinder, H.; Ferreira, J.A. Evaluating Harmonic Distortions in Brushless Doubly Fed Induction Machines. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Mcmahon, R.; Tavner, P.; Abdi, E.; Malliband, P.; Barker, D. Characterising brushless doubly fed machine rotors. IET Electr. Power Appl. 2013, 7, 535–543. [Google Scholar] [CrossRef]
- Xiong, F.; Wang, X. Design of a Low-Harmonic-Content Wound Rotor for the Brushless Doubly Fed Generator. IEEE Trans. Energy Convers. 2014, 29, 158–168. [Google Scholar] [CrossRef]
- Logan, T.G.; McMahon, R.A.; Tavner, P.J.; Tohidi, S. A comparison of cage and nested-loop BDFM rotors. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Abdi, S.; Grace, A.; Abdi, E.; McMahon, R. A new optimized rotor design for brushless doubly fed machines. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Oraee, A.; Abdi, E.; Abdi, S.; McMahon, R.; Tavner, P.J. Effects of Rotor Winding Structure on the BDFM Equivalent Circuit Parameters. IEEE Trans. Energy Convers. 2015, 30, 1660–1669. [Google Scholar] [CrossRef]
- Wallace, A.; Rochelle, P.; Spee, R. Rotor modeling and development for brushless doubly-fed machines. Electr. Mach. Power Syst. 1995, 23, 703–715. [Google Scholar] [CrossRef]
- Wang, X.; Liu, D.; Polinder, H.; Lahaye, D.; Ferreira, J.A. Comparison of nested-loop rotors in brushless doubly-fed induction machines. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–6. [Google Scholar]
- Olubamiwa, O.I.; Gule, N.; Kamper, M.J. Coupled circuit analysis of the brushless doubly fed machine using the winding function theory. IET Electr. Power Appl. 2020, 14, 1558–1569. [Google Scholar] [CrossRef]
- Strous, T.D.; Shipurkar, U.; Polinder, H.; Ferreira, J.A. Comparing the Brushless DFIM to other Generator Systems for Wind Turbine Drive-Trains. J. Phys. Conf. Ser. 2016, 753, 112014. [Google Scholar] [CrossRef]
- Abdi, S.; Abdi, E.; Oraee, A.; McMahon, R. Optimization of Magnetic Circuit for Brushless Doubly Fed Machines. IEEE Trans. Energy Convers. 2015, 30, 1611–1620. [Google Scholar] [CrossRef]
- Abdi, S.; Abdi, E.; Oraee, A.; McMahon, R.A. Investigation of magnetic wedge effects in large-scale BDFMs. In Proceedings of the 2nd IET Renewable Power Generation Conference (RPG 2013), Beijing, China, 9–11 September 2013; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Logan, T.; Mcmahon, R.; Seffen, K. Noise and vibration in brushless doubly fed machine and brushless doubly fed reluctance machine. IET Electr. Power Appl. 2014, 8, 50–59. [Google Scholar] [CrossRef]
- Strous, T.D.; Wang, X.; Polinder, H.; Ferreira, J.A.B. Brushless doubly-fed induction machines: Torque ripple. In Proceedings of the 2015 IEEE International Electric Machines Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 1145–1151. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, W. Harmonics in Brushless Doubly Fed Induction Generator for Torque Ripple Analysis and Modeling. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Gorginpour, H.; Jandaghi, B.; Oraee, A.; Saket, M.A.; Ahmadian, M.; Oraee, H. Reduction of the torque ripple in Brushless Doubly-Fed Machine. In Proceedings of the 2011 3rd International Youth Conference on Energetics (IYCE), Leiria, Portugal, 7–9 July 2011; pp. 1–7. [Google Scholar]
- Wang, X.; Strous, T.D.; Lahaye, D.; Polinder, H.; Ferreira, J.A. Effects of rotor skew on the performance of brushless doubly-fed induction machine. In Proceedings of the 2015 IEEE International Electric Machines Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 260–265. [Google Scholar] [CrossRef]
- Roberts, P.C.; McMahon, R.A.; Tavner, P.J.; Maciejowski, J.M.; Flack, T.J. Equivalent circuit for the brushless doubly fed machine (BDFM) including parameter estimation and experimental verification. IEE Proc. Electr. Power Appl. 2005, 152, 933–942. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.H.; Li, Y.T.; Lin, I.H.; Hsieh, M.F. A design approach integrating the magnetic circuit and electric circuit models for BDFIM. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 1685–1690. [Google Scholar] [CrossRef]
- Hsieh, M.F.; Lin, I.H.; Hsu, Y.C.; McMahon, R.A. Design of Brushless Doubly-Fed Machines Based on Magnetic Circuit Modeling. IEEE Trans. Magn. 2012, 48, 3017–3020. [Google Scholar] [CrossRef]
- Gorginpour, H.; Oraee, H.; McMahon, R.A. Electromagnetic-Thermal Design Optimization of the Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2014, 61, 1710–1721. [Google Scholar] [CrossRef]
- Gorginpour, H.; Oraee, H.; McMahon, R.A. A Novel Modeling Approach for Design Studies of Brushless Doubly Fed Induction Generator Based on Magnetic Equivalent Circuit. IEEE Trans. Energy Convers. 2013, 28, 902–912. [Google Scholar] [CrossRef]
- Wang, X.; Roberts, P.C.; McMahon, R.A. Optimisation of BDFM stator design using an equivalent circuit model and a search method. In Proceedings of the 3rd IET International Conference on Power Electronics, Machines and Drives (PEMD 2006), Dublin, Ireland, 4–6 April 2006; pp. 606–610. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; McMahon, R.A.; Tavner, P.J. Design of the Brushless Doubly-Fed (Induction) Machine. In Proceedings of the 2007 IEEE International Electric Machines Drives Conference, Antalya, Turkey, 3–5 May 2007; pp. 1508–1513. [Google Scholar] [CrossRef]
- Wang, X.; Strous, T.D.; Lahaye, D.; Polinder, H.; Ferreira, J.A. Finite element modeling of brushless doubly-fed induction machine based on magneto-static simulation. In Proceedings of the 2015 IEEE International Electric Machines Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 315–321. [Google Scholar] [CrossRef]
- Olubamiwa, O.I.; Gule, N. Design and optimization of a Cage + Nested loops rotor BDFM. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 1868–1874. [Google Scholar] [CrossRef]
- Olubamiwa, O.I.; Gule, N. Prioritizing power factor in power density assessments of doubly fed induction generator alternatives. In Proceedings of the 2020 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 24–26 June 2020; pp. 47–52. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Pole Pair Combinations | ||
|---|---|---|---|
| 2/3 | 2/4 | 4/6 | |
| Power density [29,38,39] | High | Medium | Low |
| Efficiency [29,38,39] | High | Medium | Low |
| Torque ripple [38] | Low | High | Low |
| Harmonic distortion [40,41] | Low | High | Low |
| UMP [35,36] | Present | - | - |
| Component | Description |
|---|---|
| Rs0 | Thermal resistance between external frame and environment with thermal resistance of external frame |
| Rs1 | Thermal resistance of stator core |
| Rs2 | Thermal resistance of coil insulator |
| Rs3/Rs5 Rs7/Rs9 | Thermal resistance of PW & CW end-winding to middle of slot at drive end/non-drive end sections |
| Rs4/Rs6 Rs8/Rs10 | Thermal resistance between PW & CW end-winding and environment at drive end/non-drive end sections |
| Rag | Thermal resistance between rotor and stator |
| Rr1 | Thermal resistance of rotor slot insulator |
| Rr2/Rr4 | Thermal resistance of rotor end-winding to middle of slot at drive end/non-drive end sections |
| Rr3/Rr5 | Thermal resistance between rotor end-winding and environment at drive end/non-drive end sections |
| Rr6 | Thermal resistance of rotor core |
| Rr7 | Thermal resistance between shaft and environment |
| Pfe,(s/r), Pfric | Stator/rotor iron, frictional losses |
| Pcu,ew, Pcu,slot | End-winding, slot copper losses |
| Description | Relevant References | Models/Analytical Methods | Applications/Advantages | Limitations |
|---|---|---|---|---|
| 6 MW BDFM design | [4,23,58] | Equivalent circuit models, CC models, FEA | Comprehensive MW rated BDFM design | Impractical for smaller designs |
| BDFM design with EEC and MEC models | [59,60] | EEC and MEC models | Computationally cheap | Limited functionality |
| Electromagnetic and thermal design of BDFMs | [61,62] | EEC, MEC & thermal models, vibration analysis, 2D FEA, imperialist competitive algorithm | Robust design procedure; broad functionality | Complex implementation |
| BDFM rotor design and power density optimization | [49,66,67] | CC model, Transient FEA, NSGA-II, Response surface approximations | Rotor type selection; Systematic power output evaluation; computationally cheap optimization | No thermal considerations; slightly complex implementation |
| Electric and magnetic loading optimization | [63,64] | Equivalent circuit model, Tabu search method | Maximizing power output, easy implementation | Power factor constraint too low |
| Multi-objective optimizations | [39,40,65] | Magnetostatic FEA, NSGA-II | Computationally cheap optimizations; material cost, efficiency & torque optimizations | No power factor consideration |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olubamiwa, O.I.; Gule, N. A Review of the Advancements in the Design of Brushless Doubly Fed Machines. Energies 2022, 15, 725. https://doi.org/10.3390/en15030725
Olubamiwa OI, Gule N. A Review of the Advancements in the Design of Brushless Doubly Fed Machines. Energies. 2022; 15(3):725. https://doi.org/10.3390/en15030725
Chicago/Turabian StyleOlubamiwa, Oreoluwa I., and Nkosinathi Gule. 2022. "A Review of the Advancements in the Design of Brushless Doubly Fed Machines" Energies 15, no. 3: 725. https://doi.org/10.3390/en15030725