
Grid and PV Fed Uninterruptible Induction Motor Drive Implementation and Measurements †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Designs
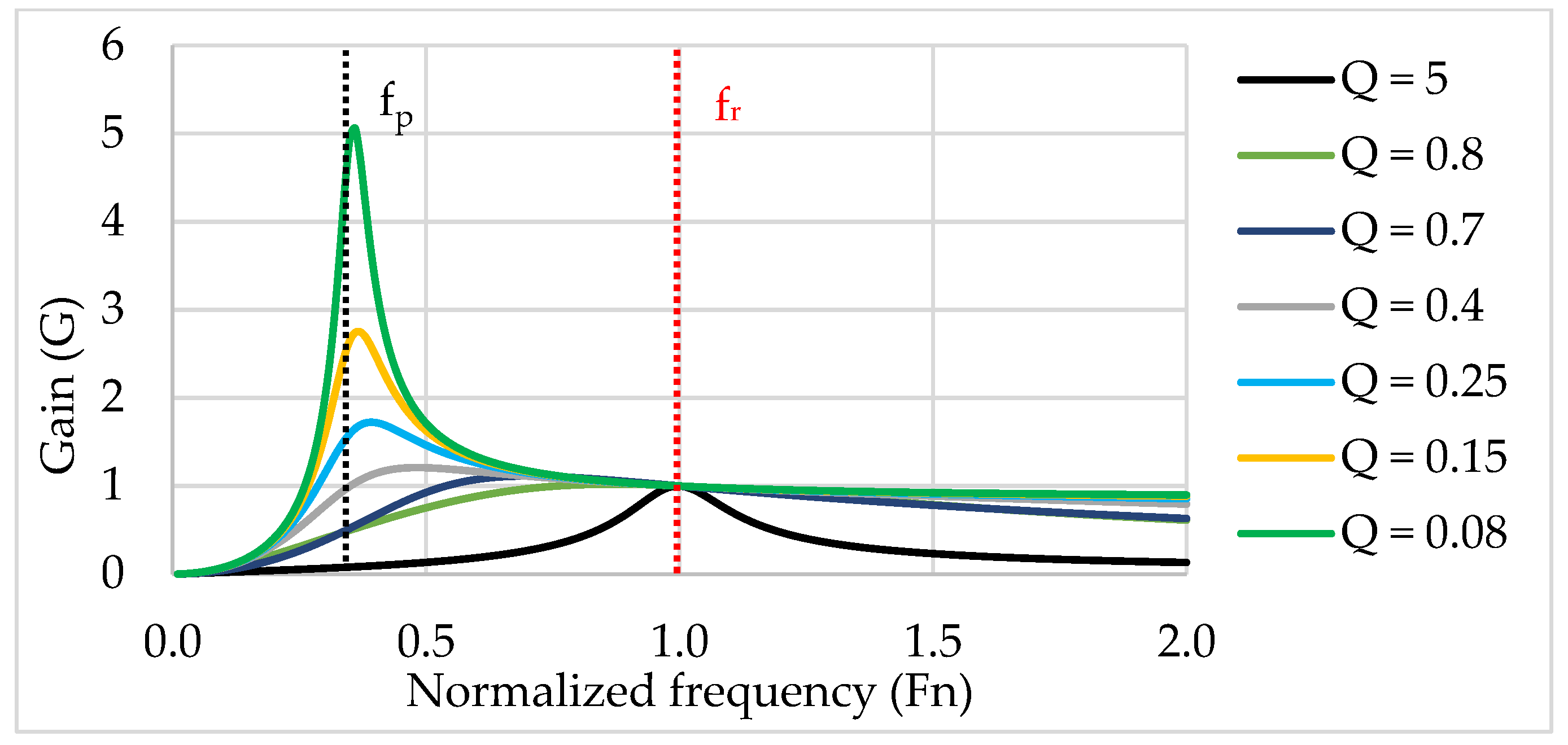
2.1. LLC Converter in General
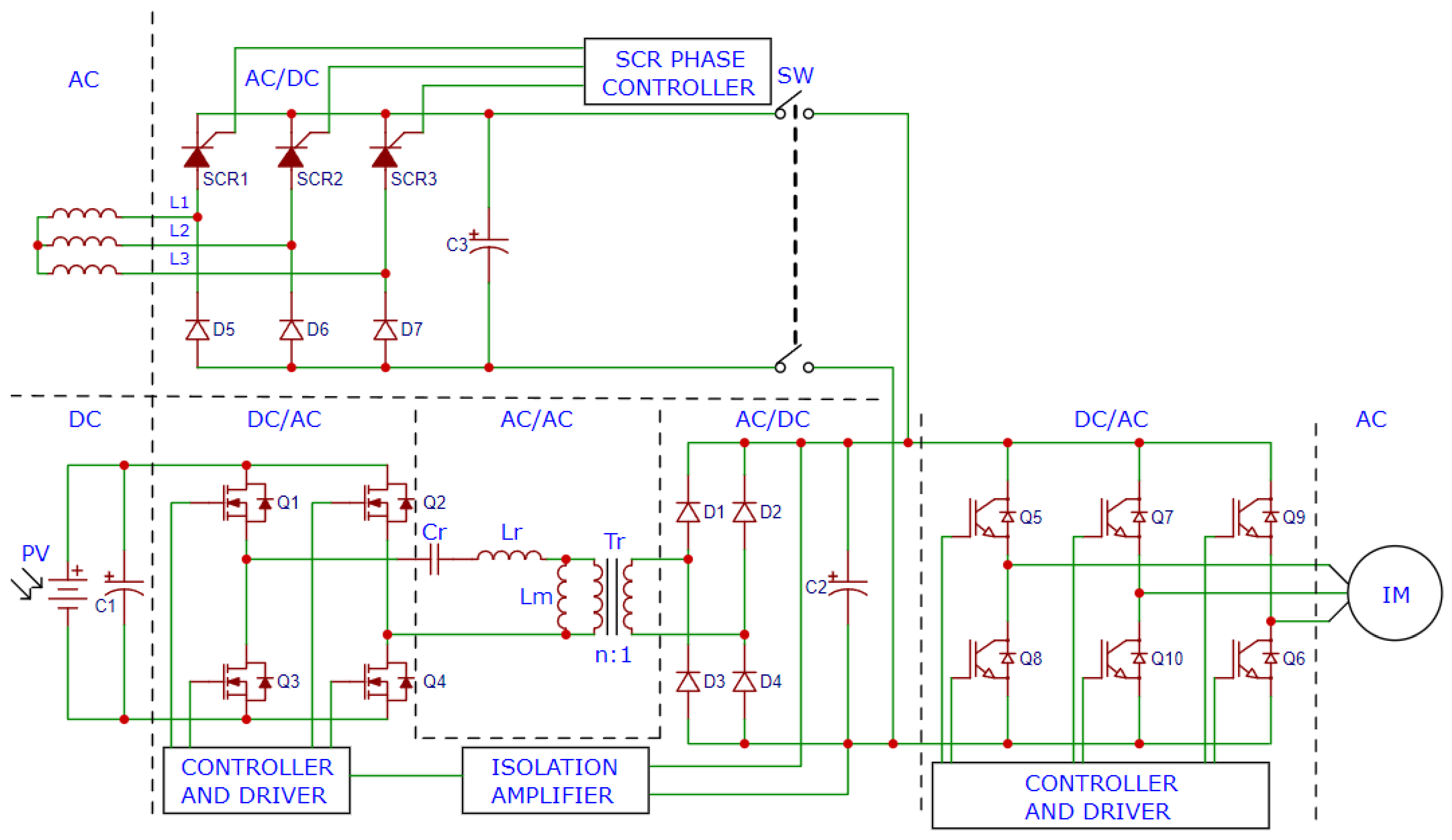
2.2. Uninterruptible Induction Motor Variable-Frequency Drive
- The LLC converter is turned off, only the rectifier is feeding the motor;
- The rectifier is turned off, only the LLC converter is feeding the motor;
- Both the rectifier and the LLC converter are simultaneously feeding the motor at a certain rate. The ratio depends on the magnitude of the voltage generated by the converters.
2.3. LLC Converter Design for Induction Motor Variable-Frequency Drive
3. LLC Converter Implementation
3.1. Single-Phase Inverter
3.2. LLC Tank and Transformer
3.2.1. Output Rectifier
3.2.2. Output Voltage Measurement Circuit and Microcontroller
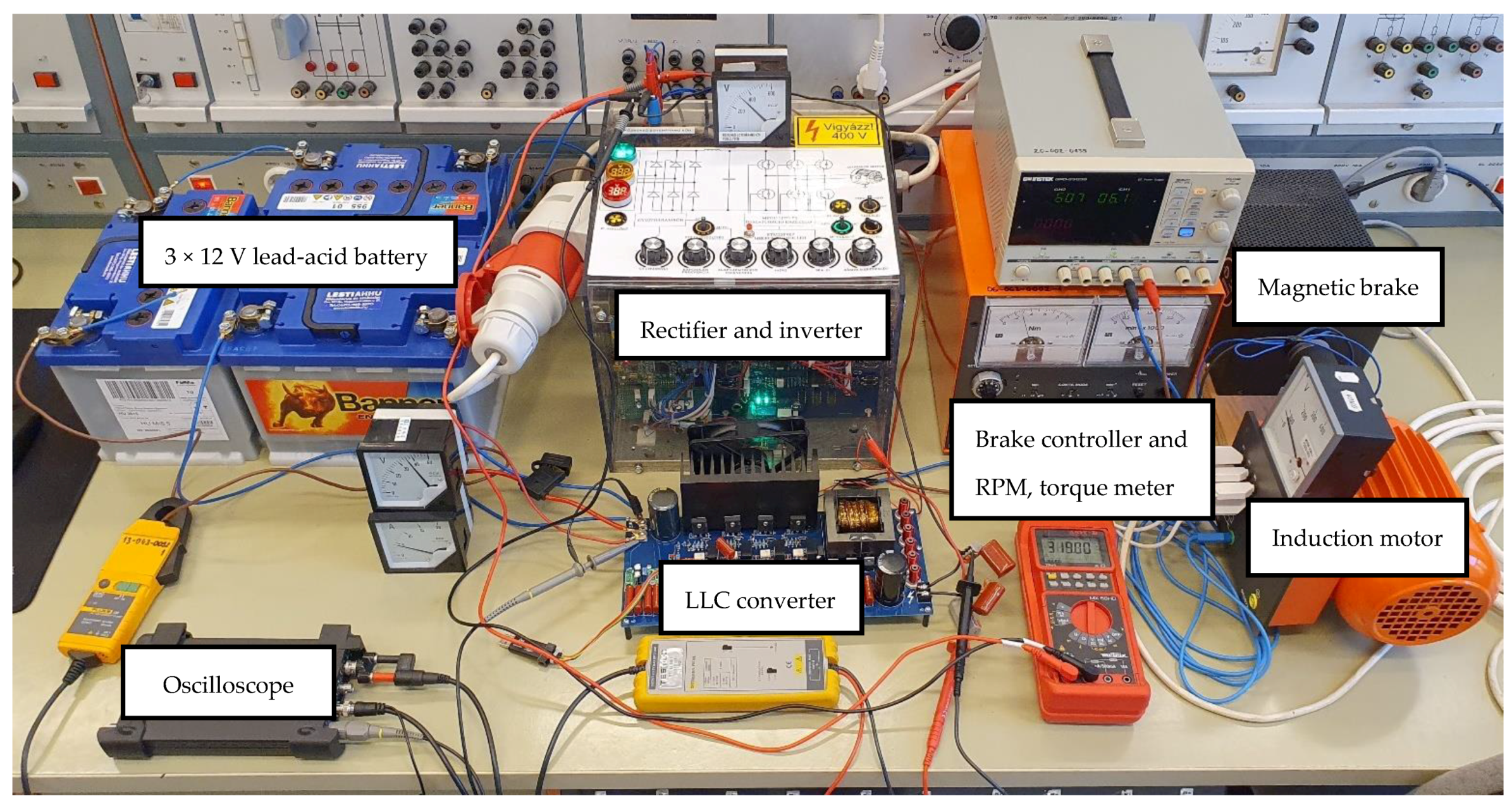
4. Uninterruptible Induction Motor Drive Implementation
5. Measurements
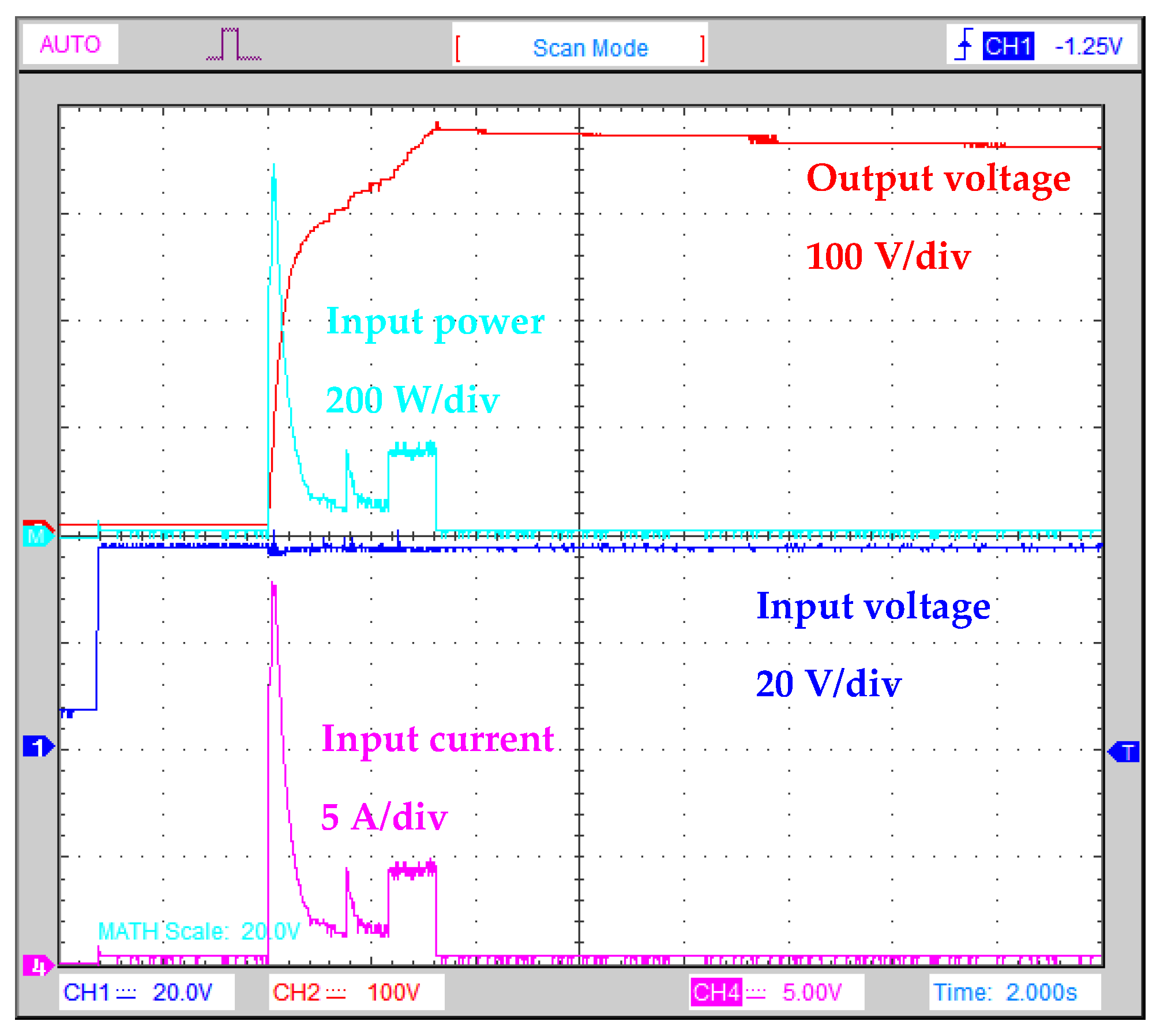
5.1. LLC Converter Energy-Free Turn on Transient
5.2. LLC Converter Normal Operation
5.3. LLC Converter Fed by Solar Panel
5.4. LLC Converter Fed by Batteries and Solar Panel
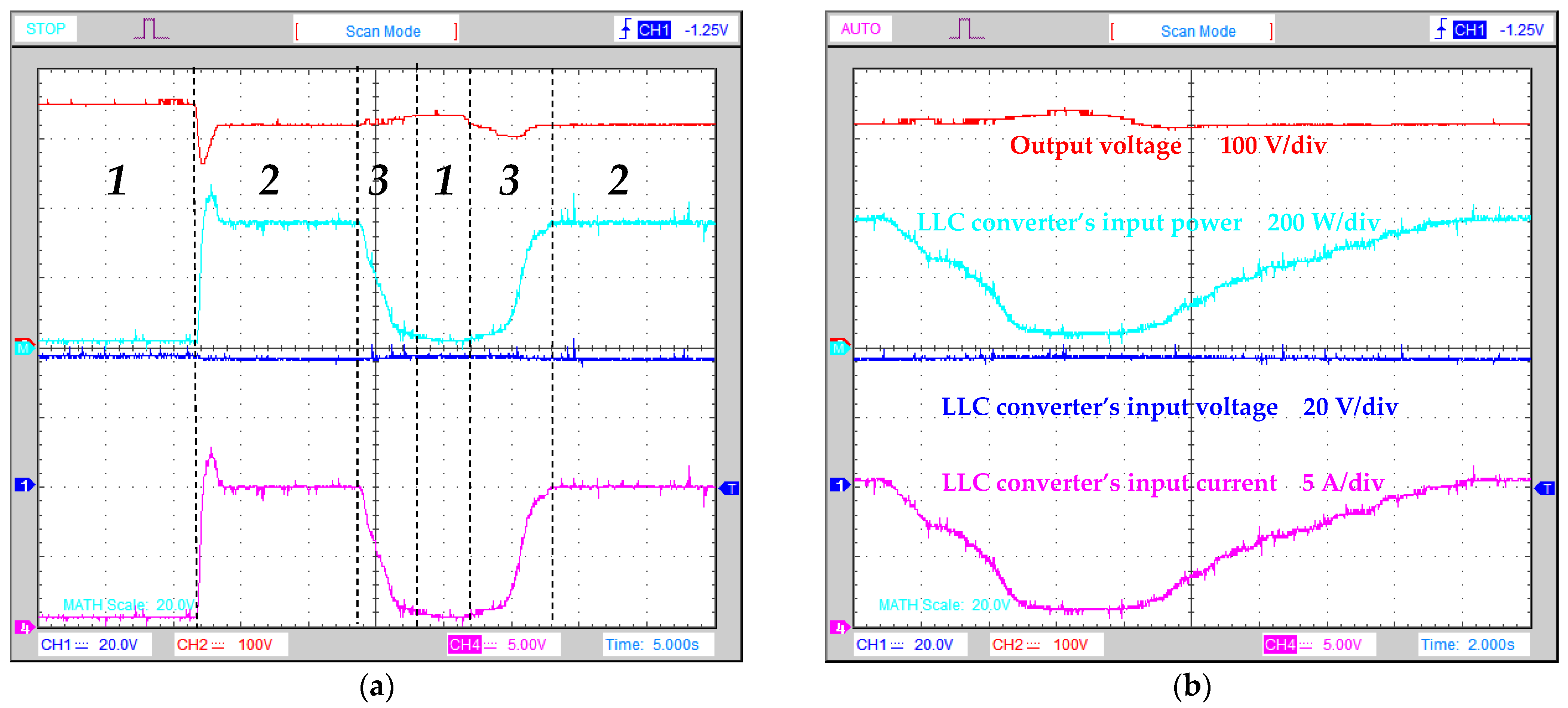
5.5. Uninterruptible Induction Motor Drive
- The LLC converter is turned off, only the rectifier is feeding the motor;
- The rectifier is turned off, only the LLC converter is feeding the motor;
- Both the rectifier and the LLC converter are simultaneously feeding the motor at a certain rate.
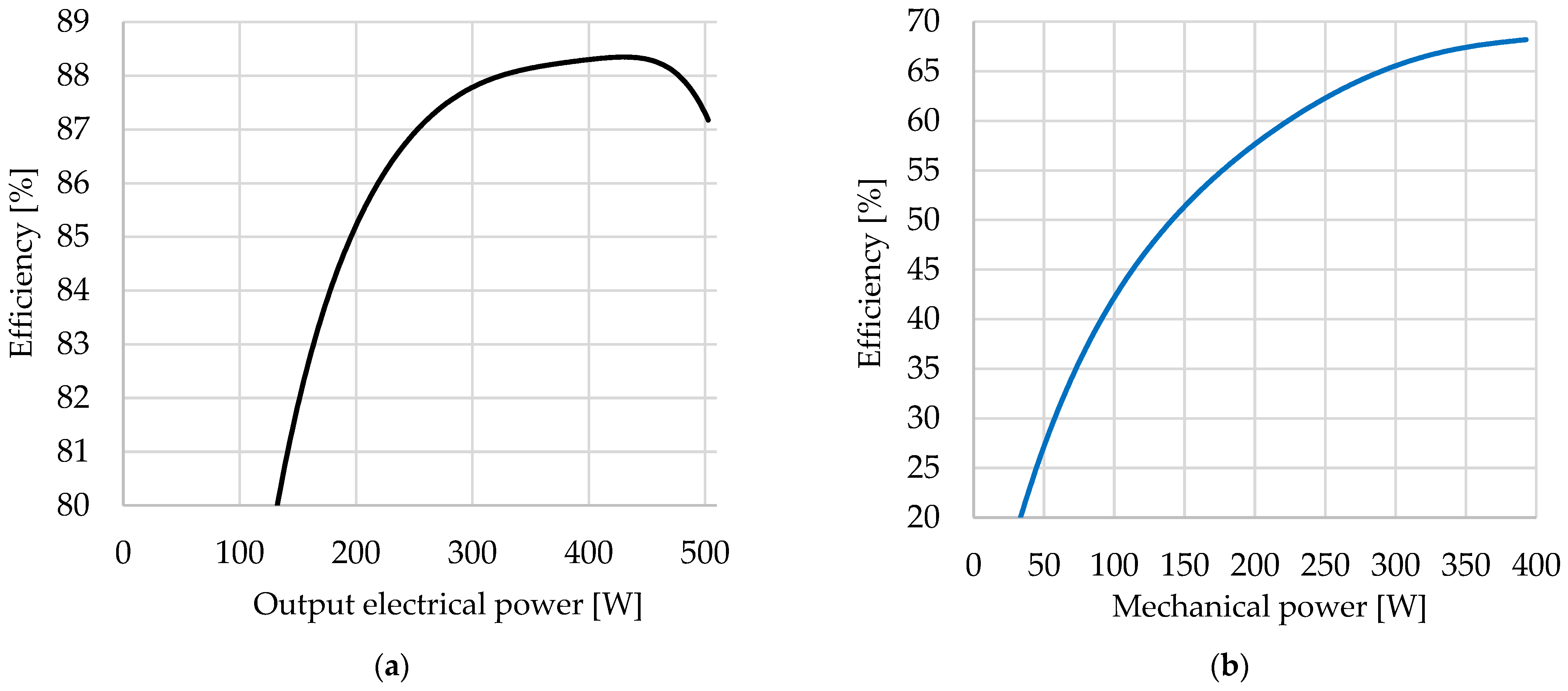
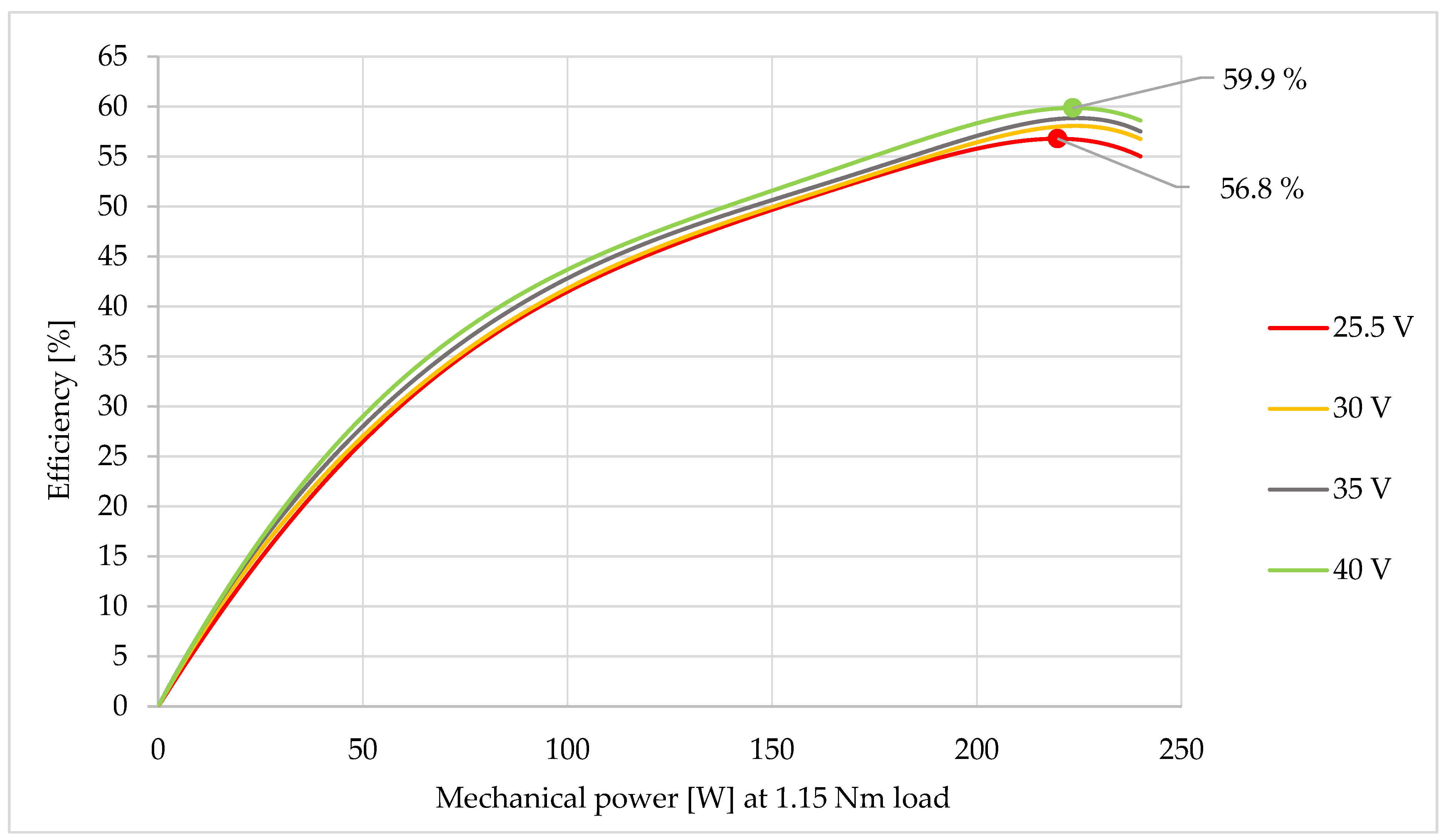
5.6. Efficiency Measurements
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hasanuzzaman, M.; Zubir, U.S.; Ilham, N.I.; Seng Che, H. Global electricity demand, generation, grid system, and renewable energy polices: A review. WIREs Energ. Environ. 2016, 6, 18. [Google Scholar] [CrossRef]
- Frivaldsky, M.; Kascak, S.; Morgos, J.; Prazenica, M. From Non-Modular to Modular Concept of Bidirectional Buck/Boost Converter for Microgrid Applications. Energies 2020, 13, 3287. [Google Scholar] [CrossRef]
- Derbeli, M.; Napole, C.; Barambones, O.; Sanchez, J.; Calvo, I.; Fernández-Bustamante, P. Maximum Power Point Tracking Techniques for Photovoltaic Panel: A Review and Experimental Applications. Energies 2021, 14, 7806. [Google Scholar] [CrossRef]
- Adamczyk, M.; Orlowska-Kowalska, T. Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive. Sensors 2019, 19, 4979. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rafael, R.B.; Istvan, B. LLC Resonant Converter Design and Simulation for PV Motor Drives. In Proceedings of the 2021 22nd International Carpathian Control Conference (ICCC), Ostrava, Czech Republic, 31 May–1 June 2021; pp. 1–5. [Google Scholar]
- Escudero, M.; Kutschak, M.-A.; Pulsinelli, F.; Rodriguez, N.; Morales, D.P. On the Practical Evaluation of the Switching Loss in the Secondary Side Rectifiers of LLC Converters. Energies 2021, 14, 5915. [Google Scholar] [CrossRef]
- Sam, A.-R. Resonant LLC Converter: Operation and Design. Infineon 2012, 1, 19. [Google Scholar]
- Hang-Seok, C. Half-Bridge LLC Resonant Converter Design Using FSFR-Series Fairchild Power Switch (FPSTM); Fairchild: Sunnyvale, CA, USA, 2007; p. 20. [Google Scholar]
- Shukla, S.; Singh, B. Single Stage PV-Grid Interactive Induction Motor Drive with Improved Flux Estimation Technique for Water Pumping with Reduced Sensors. IEEE Trans. Power Electron. 2020, 35, 12988–12999. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. Grid-PV Array Fed Induction Motor Drive for Water Pumping. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Madras, India, 18–21 December 2018; p. 6. [Google Scholar]
- Abdelwanis, M.I.; Rashad, E.M.; Taha, I.B.M.; Selim, F.F. Implementation and Control of Six-Phase Induction Motor Driven by a Three-Phase Supply. Energies 2021, 14, 7798. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, C.; Tang, T. An Optimal Train Speed Profile Planning Method for Induction Motor Traction System. Energies 2021, 14, 5153. [Google Scholar] [CrossRef]
- Cortés, B.; Tapia, R.; Flores, J.J. System-Independent Irradiance Sensorless ANN-Based MPPT for Photovoltaic Systems in Electric Vehicles. Energies 2021, 14, 4820. [Google Scholar] [CrossRef]
- Yang, C.; Liang, T.; Chen, K.; Li, J.; Lee, J. Loss analysis of half-bridge LLC resonant converter. In Proceedings of the 1st International Future Energy Electronics Conference (IFEEC), Tainan City, Taiwan, 2–6 November 2013; p. 6. [Google Scholar]
- Wang, Q.; Zhang, X.; Burgos, R.; Boroyevich, D.; White, A.; Kheraluwala, M. Design considerations for a high efficiency 3 kW LLC resonant DC/DC transformer. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 5454–5461. [Google Scholar]
- Schmidt, O.R.; Myhre, E. 380Vdc/48Vdc/ 3kw DC/DC converter with 98.2% efficiency. In Proceedings of the IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015; pp. 1–6. [Google Scholar]
- Eltamaly, A.M.; Alolah, A.I.; Badr, B.M. Fuzzy controller for three phases induction motor drives. In Proceedings of the International Conference on Autonomous and Intelligent Systems, Povoa de Varzim, Portugal, 21–23 June 2010; p. 6. [Google Scholar]
- Eltamaly, A.M.; Alolah, A.I.; Hamouda, R.; Abdulghany, M.Y. A novel digital implementation of AC voltage controller for speed control of induction motor. Int. J. Power Energy Convers. 2010, 2, 78–94. [Google Scholar] [CrossRef] [Green Version]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boros, R.R.; Bodnár, I. Grid and PV Fed Uninterruptible Induction Motor Drive Implementation and Measurements. Energies 2022, 15, 708. https://doi.org/10.3390/en15030708
Boros RR, Bodnár I. Grid and PV Fed Uninterruptible Induction Motor Drive Implementation and Measurements. Energies. 2022; 15(3):708. https://doi.org/10.3390/en15030708
Chicago/Turabian StyleBoros, Ruben Rafael, and István Bodnár. 2022. "Grid and PV Fed Uninterruptible Induction Motor Drive Implementation and Measurements" Energies 15, no. 3: 708. https://doi.org/10.3390/en15030708