
A Robust Nonlinear Sliding Mode Controller for a Three-Phase Grid-Connected Inverter with an LCL Filter
 , , ,
, , ,
Abstract
:1. Introduction
- (1)
- it guarantees the finite time convergence towards the origin;
- (2)
- it requires only knowledge about the sliding variable for controller design;
- (3)
- a continuous signal is produced to reduce the chattering effects.
- The nonlinear ST-ISMC control law is implemented in a stationary frame of reference for the first time to reduce the computational burden associated with the synchronous reference frame in practical implementation.
- A current controller is devised to inject current into the grid while considering adverse disturbance sources such as filter parametric variations, grid inductance change, and grid harmonic components.
- STI-SMC control is designed without any external damping mechanism to reduce the cost and power loss.
2. System Mathematical Modeling
- (1)
- The dc voltage, , at the inverter input is taken from an ideal dc source.
- (2)
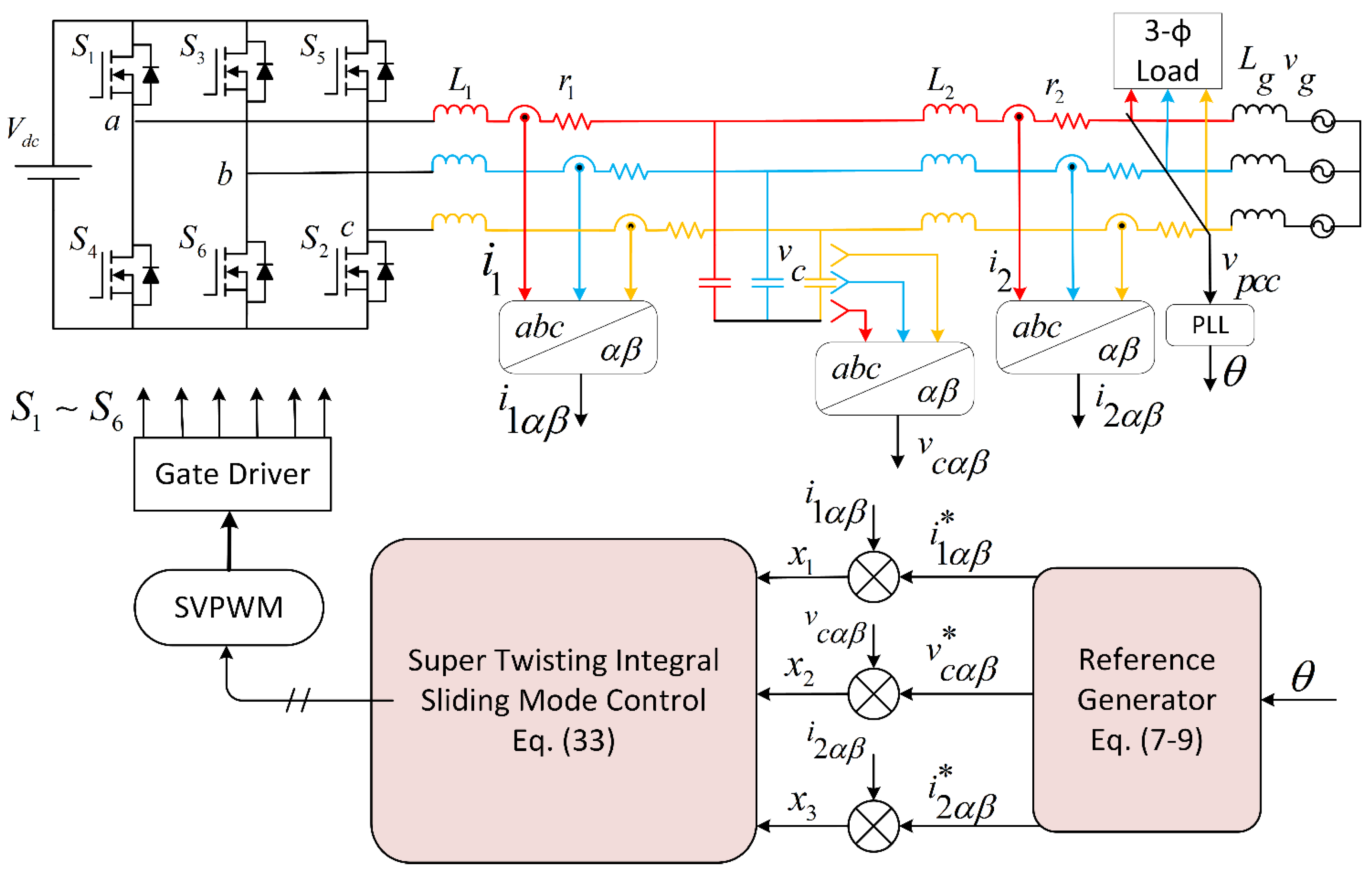
- The utility grid is considered pure inductive, while the uncertainty in inductance is denoted by . The mathematical model of the GC-VSI system in the reference frame is derived as follows:where is the control input, inverter output current is , grid current , capacitor voltage , and are obtained using sensors. To inject current waveform in-phase with grid voltages, the reference for grid current, , is obtained by utilizing the utility grid voltage phase angle extracted through the phase locked loop (PLL) in (7). Based on the system dynamics, inverter side reference current, , and capacitor reference voltages, , can be written as follows [22,23]:
3. Super-Twisting Integral Sliding Mode Control Design
4. Simulation Results
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Dc supply voltage | |
| Grid supply voltage | |
| Inverter output current | |
| Grid output current | |
| Voltage across filter capacitor | |
| C | Filter capacitor |
| 1st Inductor of LCL filter | |
| 2nd Inductor of LCL filter | |
| Grid impedance | |
| Sliding surface coefficients | |
| SMC reaching law design parameter | |
| Controller gains | |
| Switching frequency | |
| Grid frequency | |
| Equivalent control | |
| Super-twisting switching action | |
| Super-twisting Integral Sliding Mode Law |
References
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid connected photovoltaic systems: An overview of recent research and emerging pv converter technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Lin, Z.; Ruan, X.; Wu, L.; Zhang, H.; Li, W. Multi resonant component-based grid-voltage-weighted feedforward scheme for grid- connected inverter to suppress the injected grid current harmonics under weak grid. IEEE Trans. Power Electron. 2020, 35, 9784–9793. [Google Scholar] [CrossRef]
- Jamil, M.; Hussain, B.; Abu-Sara, M.; Boltryk, R.; Sharkh, S. Microgrid power electronic converters: State of the art and future challenges. In Proceedings of the IEEE 44th International Universities Power Engineering Conference (UPEC), Glasgow, UK, 1–4 September 2009; pp. 1–5. [Google Scholar]
- Bai, Z.; Ma, H.; Xu, D.; Wu, B.; Fang, Y.; Yao, Y. Resonance damping and harmonic suppression for grid-connected current-source converter. IEEE Trans. Ind. Electron. 2013, 61, 3146–3154. [Google Scholar] [CrossRef]
- Sharma, H.R.; Suryawanshi, H.M.; Chaturvedi, P.; Govind, D. Implementation of Passive Damping Technique in LCL Filter for Three-Phase Grid Connected Inverter. In Proceedings of the 2022 IEEE 2nd International Conference on Sustainable Energy and Future Electric Transportation (SeFeT), Hyderabad, India, 4–6 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, W.; He, Y.; Tang, T.; Blaabjerg, F. A New Design Method for the Passive Damped LCL and LLCL Filter-Based Single-Phase Grid-Tied Inverter. IEEE Trans. Ind. Electron. 2013, 60, 4339–4350. [Google Scholar] [CrossRef]
- Sgrò, D.; Souza, S.A.; Tofoli, F.L.; Leão, R.P.S. An integrated design approach of LCL filters based on nonlinear inductors for grid-connected inverter applications. Electr. Power Syst. Res. 2020, 186, 106389. [Google Scholar] [CrossRef]
- Wu, W.; Liu, Y.; He, Y.; Chung, H.S.-H.; Liserre, M.; Blaabjerg, F. Damping Methods for Resonances Caused by LCL-Filter-Based Current-Controlled Grid-Tied Power Inverters: An Overview. IEEE Trans. Ind. Electron. 2017, 64, 7402–7413. [Google Scholar] [CrossRef] [Green Version]
- Avila, V.H.; Leite, V. Control of grid-connected inverter output current: A practical review. In Proceedings of the IEEE 9th International Conference on Renewable Energy Research and Application (ICRERA), Glasgow, UK, 27–30 September 2020; pp. 232–235. [Google Scholar]
- Jamil, M.; Waris, A.; Gilani, S.O.; Khawaja, B.A.; Khan, M.N.; Raza, A. Design of robust higher-order repetitive controller using phase lead compensator. IEEE Access 2020, 8, 30603–30614. [Google Scholar] [CrossRef]
- Husev, O.; Roncero-Clemente, C.; Makovenko, E.; Pimentel, S.P.; Vinnikov, D.; Martins, J. Optimization and implementation of the proportional-resonant controller for grid-connected inverter with significant computation delay. IEEE Trans. Ind. Electron. 2019, 67, 1201–1211. [Google Scholar] [CrossRef]
- Qu, B.; Hong, X.-Y.; Yao, W.-X.; Lu, Z.-Y.; Guerrero, J.M. An optimized deadbeat control scheme using fuzzy control in three phase voltage source pwm rectifier. In Proceedings of the IEEE Twenty-Fourth Annual Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 1215–1219. [Google Scholar]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional- resonant controllers and filters for grid-connected voltage-source con- verters. IEE Proc.-Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef]
- Liu, Q.; Caldognetto, T.; Buso, S. Review and comparison of grid- tied inverter controllers in microgrids. IEEE Trans. Power Electron. 2019, 35, 7624–7639. [Google Scholar] [CrossRef]
- Alali, M.A.E.; Shtessel, Y.B.; Barbot, J.-P. Grid-Connected Shunt Active LCL Control via Continuous Sliding Modes. IEEE/ASME Trans. Mechatron. 2019, 24, 729–740. [Google Scholar] [CrossRef]
- Roy, T.; Mahmud, M.; Hossain, M.; Oo, A. Nonlinear backstepping controller design for sharing active and reactive power in three-phase grid-connected photovoltaic systems. In Proceedings of the IEEE Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015. [Google Scholar]
- Meza, C.; Biel, D.; Jeltsema, D.; Scherpen, J.M. Lyapunov-based control scheme for single-phase grid-connected pv central inverters. IEEE Trans. Control Syst. Technol. 2011, 20, 520–529. [Google Scholar] [CrossRef]
- Abrishamifar, A.; Ahmad, A.; Mohamadian, M. Fixed switching frequency sliding mode control for single-phase unipolar inverters. IEEE Trans. Power Electron. 2011, 27, 2507–2514. [Google Scholar] [CrossRef]
- Levant, A. Universal single-input-single-output (siso) sliding-mode controllers with finite-time convergence. IEEE Trans. Auto. Control 2001, 46, 1447–1451. [Google Scholar] [CrossRef] [Green Version]
- Emel’yanov, S.; Korovin, S.; Levantovskii, L. Higher-order sliding modes in binary control systems. Sov. Phys. Dokl. 1986, 31, 291. [Google Scholar]
- Li, H.; Wu, W.; Huang, M.; Chung, H.S.H.; Liserre, M.; Blaabjerg, F. Design of pwm-smc controller using linearized model for grid- connected inverter with lcl filter. IEEE Trans. Power Electron. 2020, 35, 12773–12786. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W. A sliding-mode controller with multiresonant sliding surface for single-phase grid- connected vsi with an lcl filter. IEEE Trans. Power Electron. 2012, 28, 2259–2268. [Google Scholar] [CrossRef]
- Liu, J.; Shen, X.; Alcaide, A.M.; Yin, Y.; Leon, J.I.; Vazquez, S.; Wu, L.; Franquelo, L.G. Sliding mode control of grid-connected neutral-point- clamped converters via high-gain observer. IEEE Trans. Ind. Electron. 2021, 69, 4010–4021. [Google Scholar] [CrossRef]
- Zeb, K.; Busarello, T.D.C.; Islam, S.U.; Uddin, W.; Raghavendra, K.V.G.; Khan, M.A.; Kim, H.-J. Design of super twisting sliding mode controller for a three-phase grid-connected photovoltaic system under normal and abnormal conditions. Energies 2020, 13, 3773. [Google Scholar] [CrossRef]
- Kale, M.; Karabacak, M.; Kruschel, W.; Kilic, F.; Zacharias, P. Chattering free robust control of lcl filter based shunt active power filter using adaptive second order sliding mode and resonant controllers. Int. J. Electr. Power Energy Syst. 2016, 76, 174–184. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S.; Yu, X. Composite super-twisting sliding mode control design for pmsm speed regulation problem based on a novel disturbance observer. IEEE Trans. Energy Convers. 2020, 36, 2591–2599. [Google Scholar] [CrossRef]
- Derafa, L.; Benallegue, A.; Fridman, L. Super twisting control algorithm for the attitude tracking of a four rotors uav. J. Frankl. Inst. 2012, 349, 685–699. [Google Scholar] [CrossRef]
- Yeam, T.-I.; Lee, D.-C. Design of sliding-mode speed controller with active damping control for single-inverter dual-pmsm drive systems. IEEE Trans. Power Electron. 2020, 36, 5794–5801. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S.; Bayhan, S.; Zhang, Z. Sliding mode control: Overview of its applications in power converters. IEEE Ind. Electron. Mag. 2021, 15, 40–49. [Google Scholar] [CrossRef]
- Chalanga, A.; Kamal, S.; Fridman, L.M.; Bandyopadhyay, B.; Moreno, J.A. Implementation of super-twisting control: Super-twisting and higher order sliding-mode observer-based approaches. IEEE Trans. Ind. Electron. 2016, 63, 3677–3685. [Google Scholar] [CrossRef]
- Xia, J.; Guo, Y.; Zhang, X.; Jatskevich, J.; Amiri, N. Robust control strategy design for single-phase grid-connected converters under system perturbations. IEEE Trans. Ind. Electron. 2019, 66, 8892–8901. [Google Scholar] [CrossRef]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Fridman, L.; Levant, A. Higher order sliding modes. Sliding Mode Control. Eng. 2002, 11, 53–102. [Google Scholar]
- Seeber, R.; Horn, M. Stability proof for a well-established super- twisting parameter setting. Automatica 2017, 84, 241–243. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| DC supply voltage | 350 V | |
| VSI side Inductor | 1.2 mH | |
| Capacitance | C | 6 µF |
| Grid side Inductor | 1.2 mH | |
| Resistance of Inductor | 0.2 Ω | |
| Grid Voltage | 110 (RMS) | |
| Switching frequency | 12 KHz |
| Parameter | Value |
|---|---|
| α1, α2, α3 | 1.5 |
| Β | 200 |
| k1 | 13.5 |
| k2 | 13.5 |
| k3 | 5 × 104 |
| 0.5 | |
| α1, α2, α3 | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sufyan, A.; Jamil, M.; Ghafoor, S.; Awais, Q.; Ahmad, H.A.; Khan, A.A.; Abouobaida, H. A Robust Nonlinear Sliding Mode Controller for a Three-Phase Grid-Connected Inverter with an LCL Filter. Energies 2022, 15, 9428. https://doi.org/10.3390/en15249428
Sufyan A, Jamil M, Ghafoor S, Awais Q, Ahmad HA, Khan AA, Abouobaida H. A Robust Nonlinear Sliding Mode Controller for a Three-Phase Grid-Connected Inverter with an LCL Filter. Energies. 2022; 15(24):9428. https://doi.org/10.3390/en15249428
Chicago/Turabian StyleSufyan, Abu, Mohsin Jamil, Salman Ghafoor, Qasim Awais, Hafiz Ali Ahmad, Ashraf Ali Khan, and Hassan Abouobaida. 2022. "A Robust Nonlinear Sliding Mode Controller for a Three-Phase Grid-Connected Inverter with an LCL Filter" Energies 15, no. 24: 9428. https://doi.org/10.3390/en15249428