
Research on an Off-Chip Microvalve for Pneumatic Control in Microfluidic Chips


Abstract
:1. Introduction
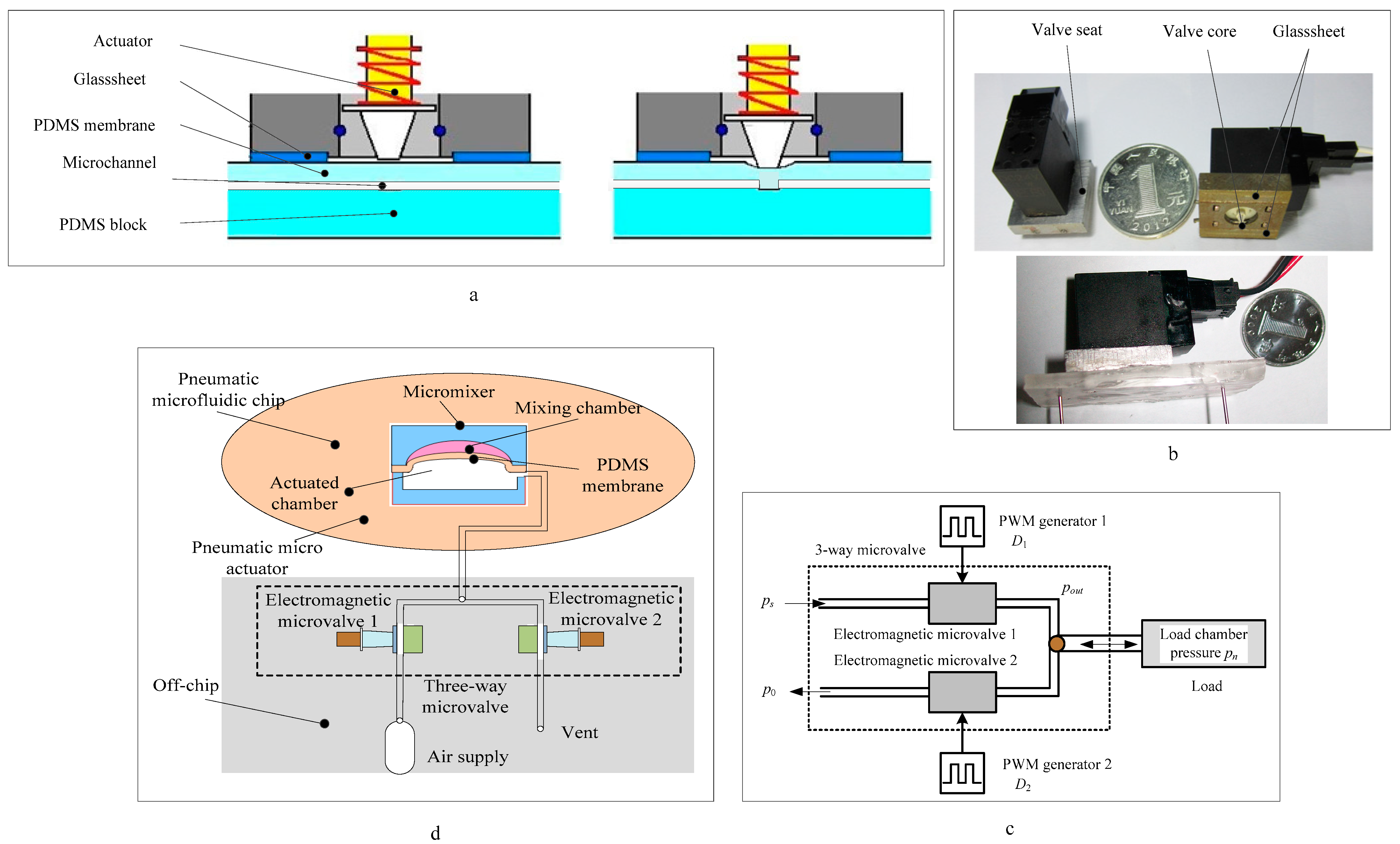
2. Architecture and Working Principle
3. Numerical Simulation of the Off-Chip Microvalve
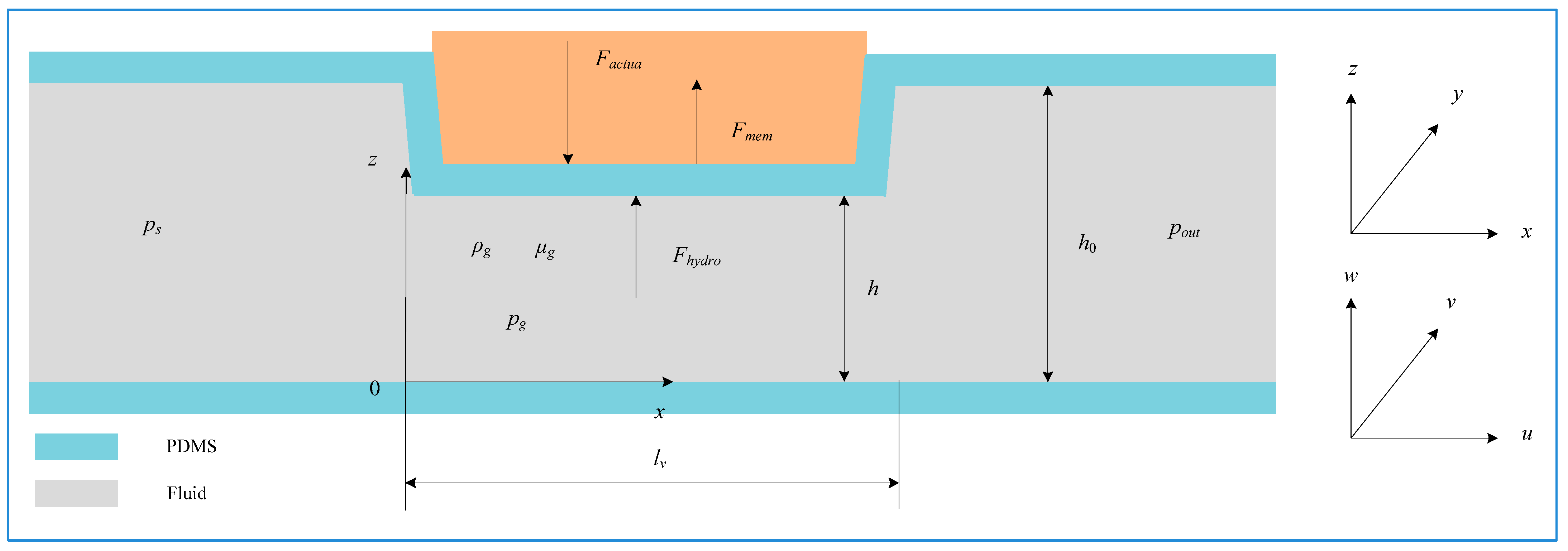
3.1. Model of the Valve-Membrane Force
3.2. Air–Solid Coupling Mathematical Model of the Valve Membrane
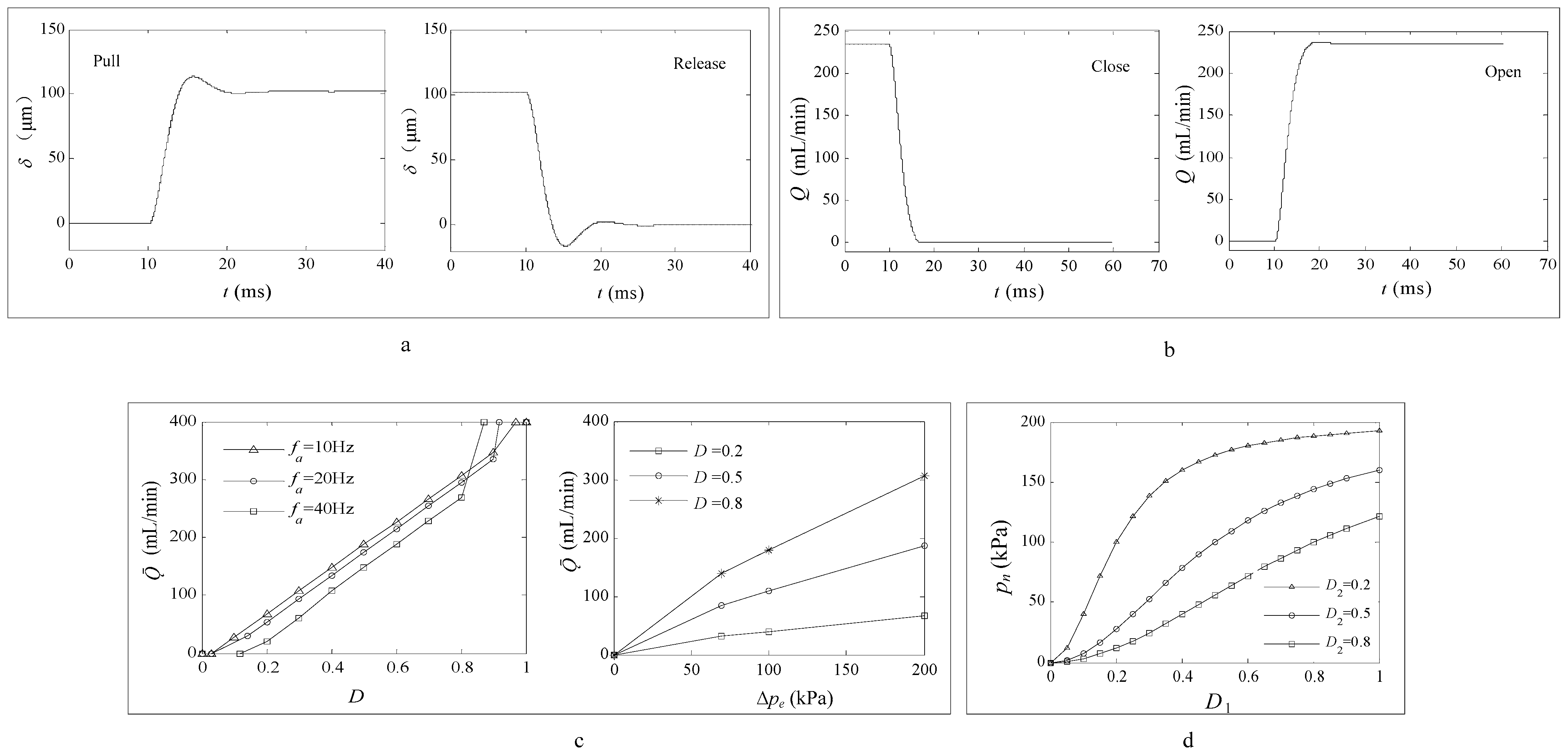
3.3. Dynamic Characteristic Simulation Results
4. Experimental Study of the Off-Chip Microvalve
4.1. Sealing Strength of Valve Body and Fatigue Test of Valve Membrane
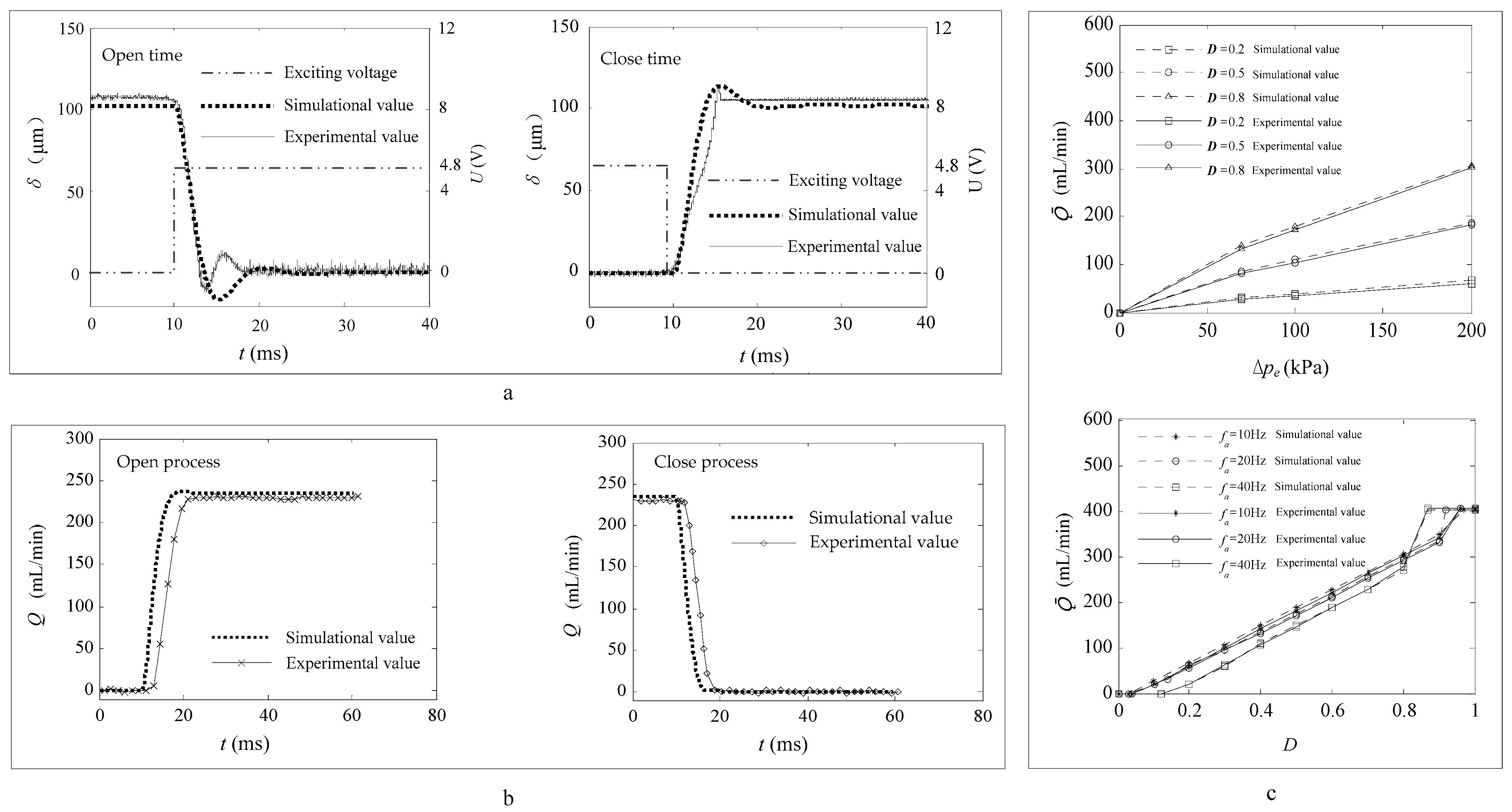
4.2. Experimental Study on Dynamic Characteristics
4.3. Experimental Performance of Mixing
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| pn | actuated chamber pressure (Pa) |
| ρn | density under 101.325 kPa and 21.1 °C (kg/m3) |
| Cv | specific heat at constant volume and 25 °C (kJ(kg·k)) |
| α | molar entropy under 25 °C (J/(mol·k)) |
| λ | thermal conductivity under 25 °C (W/(m·k)) |
| Fhydro | fluid power in the valve chamber (N) |
| k2 | elastic plate stiffness |
| h0 | initial height of the valve chamber (m) |
| Lv | length of the valve chamber (m) |
| Av | area of the valve membrane (m2) |
| μg | dynamic air viscosity of the valve chamber (Pa∙s) |
| h | displacement of the valve membrane (m) |
| ∆pe | pressure differential (Pa) |
| Q | air mass flow rate (kg/s) |
| kv1 | flow coefficient of valve-port |
| ε | pressure ratio |
| R | gas constant (J/(mol·k)) |
| K | isentropic exponent |
| D | duty cycle of PWM |
| D2 | duty cycle of PWM of electromagnetic microvalve 1 |
| Q1 | average inlet flow of three-way microvalve (m3/s) |
| Q12 | average output flow of three-way microvalve (m3/s) |
| fm | vibration frequency of the micromixer |
| ps | air source pressure (Pa) |
| Cp | specific heat at constant pressure and 25 °C (kJ/(kg·k)) |
| Cp/Cv | specific heat ratio |
| μ | viscosity under 25 °C (Pa·s) |
| Factua | driving force of the valve core (N) |
| Fmem | elastic force of the valve membrane (N) |
| pout | outlet pressure of electromagnetic microvalve (Pa) |
| wv | width of valve chamber (m) |
| γe | valve-opening of electromagnetic microvalve |
| ρg | fluid density of valve chamber (kg/m3) |
| δ | displacement of the valve core (m), δ = h |
| M | Mach number |
| φ(ε) | N2 flow coefficient |
| kx1 | microscale correction coefficient before and after orifice |
| Ap | effective area under harmony plug flow (m2) |
| Ts | temperature of the air supply (K) |
| fa | frequency of PWM (Hz) |
| D1 | duty cycle of PWM of the off-chip microvalve 1 |
| average flow of the off-chip microvalve (m3/s) | |
| Q2 | average outlet flow of three-way microvalve (m3/s) |
| ε* | pressure ratio of upstream and downstream of valve port |
| U | exciting voltage of the three-way microvalve (V) |
| t | time (s) |
References
- Shao, P.; Rummler, Z.; Schomburg, W.K. Polymer micro piezo valve with a small dead volume. J. Micromech. Microeng. 2003, 14, 305–309. [Google Scholar] [CrossRef]
- Anjewierden, D.; Liddiard, G.A.; Gale, B. An electrostatic microvalve for pneumatic control of microfluidic systems. J. Micromech. Microeng. 2012, 22, 025019. [Google Scholar] [CrossRef]
- Zheng, Y.; Dai, W.; Wu, H. A screw-actuated pneumatic valve for portable, disposable microfluidics. Lab Chip 2009, 9, 469–472. [Google Scholar] [CrossRef]
- Zeng, W.; Li, S.; Fu, H. Precise control of the pressure-driven flows considering the pressure fluctuations induced by the process of droplet formation. Microfluid. Nanofluid. 2018, 22, 133. [Google Scholar] [CrossRef]
- Bott, H.; Leonhardt, R.; Laermer, F.; Hoffmann, J. Employing fluorescence analysis for real-time determination of the volume displacement of a pneumatically driven diaphragm micropump. J. Micromech. Microeng. 2021, 31, 075003. [Google Scholar] [CrossRef]
- Guan, Y.; Yang, T.; Wu, J. Mixing and transport enhancement in microchannels by electrokinetic flows with charged surface heterogeneity. Phys. Fluids 2021, 33, 042006. [Google Scholar] [CrossRef]
- Stroock, A.D.; Whitesides, G.M. Components for integrated poly (dimethylsiloxane) microfluidic systems. Electrophoresis 2002, 23, 3461–3473. [Google Scholar]
- Zhong, J.F.; Chen, Y.; Marcus, J.S.; Scherer, A.; Quake, S.R.; Taylor, C.R.; Weiner, L.P. A microfluidic processor for gene expression profiling of single human embryonic stem cells. Lab Chip 2007, 8, 68–74. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Peng, J.; Shu, Z.; Sekar, P.K.; Li, S.; Gao, D. Determination of the Membrane Transport Properties of Jurkat Cells with a Microfluidic Device. Micromachines 2019, 10, 832. [Google Scholar] [CrossRef] [Green Version]
- Grover, W.; Skelley, A.M.; Liu, C.N.; Lagally, E.T.; Mathies, R.A. Monolithic membrane valves and diaphragm pumps for practical large-scale integration into glass microfluidic devices. Sens. Actuators B Chem. 2003, 89, 315–323. [Google Scholar] [CrossRef]
- Kecskemeti, A.; Gaispar, A. Preparation and characterization of a packed bead immobilized trypsin reactor integrated into a PDMS microfluidic chip for rapid protein digestion. Alanta 2017, 166, 275–283. [Google Scholar] [CrossRef]
- Abrishamka, A.; Paradinas, M.; Bailo, E.; Trujillo, R.R.; Pfattner, R.; Rossi, R.M.; Ocal, C.; deMello, A.J.; Amabilino, D.B.; Luis, J.P. Microfluidic Pneumatic Cages: A Novel Approach for In-chip Crystal Trapping, Manipulation and Controlled Chemical Treatment. J. Vis. Exp. 2016, 113, e54193. [Google Scholar]
- Melin, J.; Quake, S.R. Microfluidic Large-Scale Integration: The Evolution of Design Rules for Biological Automation. Annu. Rev. Biophys. Biomol. Struct. 2007, 36, 213–231. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.-W.; Lin, X.-Z.; Hwang, S.-M.; Lee, G.-B. The culture and differentiation of amniotic stem cells using a microfluidic system. Biomed. Microdevices 2009, 11, 869–881. [Google Scholar] [CrossRef]
- Tice, J.D.; Desai, A.V.; Bassett, T.A.; Apblett, C.A.; Kenis, P.J.A. Control of pressure-driven components in integrated microfluidic devices using an on-chip electrostatic microvalve. RSC Adv. 2014, 4, 51593–51602. [Google Scholar] [CrossRef]
- Selly, A.H. Colenoid actuators-further developments in extremely fast acting solenoids. SAE Trans. 1981, 90, 1770–1781. [Google Scholar]
- Liu, X.; Li, S. Control Method Experimental Research of Micro Chamber Air Pressure via a Novel Electromagnetic Microvalve. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 921–925. [Google Scholar]
- Zhang, Q.; Zhang, P.; Su, Y.; Mou, C.; Zhou, T.; Yang, M.; Xu, J.; Ma, B. On-demand control of microfluidic flow via capillary-tuned solenoid microvalve suction. Lab Chip 2014, 14, 4599–4603. [Google Scholar] [CrossRef]
- Cao, Z.; Chen, F.; Bao, N.; He, H.; Xu, P.; Jana, S.; Jung, S.; Lian, H.; Lu, C. Droplet sorting based on the number of encapsulated particles using a solenoid valve. Lab Chip 2013, 13, 171–178. [Google Scholar] [CrossRef]
- Chung, J.; Issadore, D.; Ullal, A.; Lee, K.; Weissleder, R.; Lee, H. Rare cell isolation and profiling on a hybrid magnetic/size-sorting chip. Biomicrofluidics 2013, 7, 054107. [Google Scholar] [CrossRef]
- Yang, B.; Lin, Q. A Latchable Phase-Change Microvalve with Integrated Heaters. J. Microelectromech. Syst. 2009, 18, 860–867. [Google Scholar] [CrossRef]
- Chia, B.T.; Liao, H.-H.; Yang, Y.-J. A novel thermo-pneumatic peristaltic micropump with low temperature elevation on working fluid. Sens. Actuators A Phys. 2011, 165, 86–93. [Google Scholar] [CrossRef]
- Gu, W.; Chen, H.; Tung, Y.-C.; Meiners, J.-C.; Takayama, S. Multiplexed hydraulic valve actuation using ionic liquid filled soft channels and Braille displays. Appl. Phys. Lett. 2007, 90, 033505. [Google Scholar] [CrossRef]
- Anjewierden, D. An Electrostatic Microvalve for Pneumatic Control of Microfluidic Systems. Master’s Thesis, University of Utah, Salt Lake City, UT, USA, 2011; pp. 58–59. [Google Scholar]
- Liu, X.; Li, S. An Electromagnetic Microvalve for Pneumatic Control of Microfluidic Systems. J. Lab. Autom. 2014, 19, 444–453. [Google Scholar] [CrossRef]
- Feng, Z.; Liu, X.; Li, S. Simulation on dynamic characteristics of a novel electromagnetic microvalve. Chin. Hydraul. Pneum. 2017, 10, 17–22. [Google Scholar]
- Li, S.; Liu, X.; Jia, W. Simulation on characteristics of a pneumatic electromagnetic microvalve. Chin. Hydraul. Pneum. 2013, 7, 6–8. [Google Scholar]
- Zhang, Y.; Chen, X. Blood cells separation microfluidic chip based on dielectrophoretic force. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 206. [Google Scholar] [CrossRef]
- Liu, X. Research of A Pdms Pneumatic Pressure Driven Microvalve and Applications in Pneumatic Mciro Mixing Chips. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2016; pp. 26–29. (In Chinese). [Google Scholar]
- Sun, L.; Siddique, M.K.; Wang, L.; Li, S. Mixing characteristics of a bubble mixing microfluidic chip for genomic DNA extraction based on magnetophoresis: CFD simulation and experiment. Electrophoresis 2021, 42, 2365–2374. [Google Scholar] [CrossRef]
- Zeng, W.; Jacobi, I.; Beck, D.J.; Li, S.; Stone, H.A. Characterization of syringe-pump-driven induced pressure fluctuations in elastic microchannels. Lab Chip 2015, 15, 1110–1115. [Google Scholar] [CrossRef]
- Mao, X. Research on Spatial Trajectory Control of Pneumatic Manipulator. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2010; pp. 3–4. (In Chinese). [Google Scholar]
- Li, L.; Li, H.; Kou, G.; Yang, D.; Hu, W.; Peng, J.; Li, S. Dynamic Camouflage Characteristics of a Thermal Infrared Film Inspired by Honeycomb Structure. J. Bionic Eng. 2022, 19, 458–470. [Google Scholar] [CrossRef]
- Chuang, H.S. Pneumatically-Driven Elastomeric Devices for a Programmable Lab on a Chip and Applications. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2010; pp. 32–37. [Google Scholar]
- Wiederkehr, R.S.; Salvadori, M.C.; Brugger, J.; Degasperi, F.T.; Cattani, M. Fabrication and testing of a poly(vinylidene fluoride) (PVDF) microvalve for gas flow control. Smart Mater. Struct. 2007, 16, 2302–2307. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, D.; Liu, J.; Wang, L.; Li, S. RGB color model analysis for a simple structured polydimethylsiloxane pneumatic micromixer. Slas Technol. Transl. Life Sci. Innov. 2021, 26, 510–518. [Google Scholar] [CrossRef]
- Lee, Y.-K.; Tabeling, P.; Shih, C.; Ho, C.-M. Characterization of a MEMS-Fabricated Mixing Device. In Proceedings of the ASME 2000 International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–10 November 2000; pp. 505–511. [Google Scholar]
- Maliani, A.D.E.; Hassouni, M.E.; Berthoumieu, Y.; Aboutajdine, D. Generic multivariate model for color texture classification in RGB color space. Int. J. Multimed. Inf. Retr. 2014, 4, 217–231. [Google Scholar] [CrossRef] [Green Version]
- Nazari, M.; Rashidib, S.; Esfahania, J.A. Mixing process and mass transfer in a novel design of induced-charge electrokinetic micromixer with a conductive mixing-chamber. Int. Commun. Heat Mass Transf. 2019, 108, 104293. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Fu, L.-M. Recent advances and applications of micromixers. Sens. Actuators B Chem. 2018, 259, 677–702. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Length of the electromagnetic actuator (mm) | 20.5 |
| Width of the electromagnetic actuator (mm) | 9.8 |
| Height of the electromagnetic actuator (mm) | 12.0 |
| Diameter of the valve core (mm) | 1.0 |
| Length of the microchannel (mm) | 20.0 |
| Width of the microchannel (mm) | 0.5 |
| Depth of the microchannel (mm) | 0.1 |
| Thickness of the valve membrane (mm) | 0.1 |
| Valve membrane: base/curing agent | 15:1 |
| Thickness of the PDMS thick block with a microchannel (mm) | 5.0 |
| PDMS thick block with a microchannel: base/curing agent | 8:1 |
| Length of the encapsulated microvalve | 25.0 |
| Width of the encapsulated microvalve | 9.8 |
| Height of the encapsulated microvalve | 17.0 |
| Type | Symbol | Parameter Name | Optimal Value |
|---|---|---|---|
| Electromagnetic actuator | μ0 | Air permeability (H/m) | 1.257 × 10−6 |
| D | Armature diameter (m) | 4.2 × 10−3 | |
| N | Turns per coil (r) | 5100 | |
| lx | Armature length (m) | 6 × 10−3 | |
| l0 | Non-working air gap length (m) | 0.65 × 10−3 | |
| r | Non-working air gap average width (m) | 0.5 × 10−3 | |
| R | Magnetic circuit equivalent resistance (Ω) | 550 | |
| u | Working voltage (V) | 24 | |
| δ0 | Spring preload (m) | 1.55 × 10−3 | |
| Cv | Velocity damping coefficient (N/(m/s)) | 5 | |
| Cf | Viscous damping coefficient of working medium (N/(m/s)) | 0 | |
| m | Armature weight (kg) | 30 × 10−3 | |
| k1 | Reset spring stiffness (N/m) | 7.5 × 102 | |
| N2 | ρn | Density under 101.325 kPa and 21.1 °C (kg/m3) | 1.160 |
| Cp | Specific heat under 25 °C (kJ/(kg·k)) | 1.038 | |
| Cv | Specific heat under 25 °C (kJ(kg·k)) | 0.741 | |
| Cp/Cv | Specific heat ratio | 1.401 | |
| Son | Molar entropy under 25 °C (J/(mol·k)) | 191.5 | |
| μn | Viscosity under 25 °C (Pa·s) | 175.44 × 10−7 | |
| λn | Thermal conductivity under 25 °C (W/(m·k)) | 0.02475 |
| Name | Type | Key Parameters | Manufacturer |
|---|---|---|---|
| Precision pressure-reducing valve | IR1000-01 | Two-way type, measuring range 0.005~0.2 MPa, contact measurement mode, sensitivity: 0.2%F.s. Repetition accuracy within ±0.2%F.S. | SMC |
| Miniature gas pressure sensor | XCQ-062-30A | Diameter: 1.7 mm, weight: 0.17 g, operating range: 0~3 × 105 Pa, working mode: absolute pressure, natural frequency: 300 kHz. | Kulite |
| Miniature gas flow sensor | ASF1430 | Dynamic measurement range: ±400 mL/min, maximum gas pressure: 29 psi (0.2 Mpa), minimum resolution: 0.0143 mL/min. | Sensirion |
| Power supply | Customized | Dual channel, can be 0–10 V low voltage signal converted to −150V~+150 V high voltage signal. | HIT |
| Laser displacement sensor | LK-G5000 | Displacement resolution: 0.01 μm, time resolution: 0.01 ms, sampling frequency: 393 kHz. | Keyence |
| Data acquisition card | PCI-1710-CE | 16 A/D input ports and 2 D/A output ports. | Advantech |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zuo, W.; Song, H.; Shang, T.; Dong, H.; Wang, L.; Shao, J.; Li, S. Research on an Off-Chip Microvalve for Pneumatic Control in Microfluidic Chips. Energies 2022, 15, 8094. https://doi.org/10.3390/en15218094
Liu X, Zuo W, Song H, Shang T, Dong H, Wang L, Shao J, Li S. Research on an Off-Chip Microvalve for Pneumatic Control in Microfluidic Chips. Energies. 2022; 15(21):8094. https://doi.org/10.3390/en15218094
Chicago/Turabian StyleLiu, Xuling, Wensi Zuo, Huafeng Song, Tingdong Shang, Haiwei Dong, Liangwen Wang, Jinggan Shao, and Songjing Li. 2022. "Research on an Off-Chip Microvalve for Pneumatic Control in Microfluidic Chips" Energies 15, no. 21: 8094. https://doi.org/10.3390/en15218094