
Heat Conduction with Krylov Subspace Method Using FEniCSx


Abstract
:1. Introduction
2. Heat Conduction
2.1. General Heat Conduction Equation
2.2. Boundary Conditions
2.2.1. Temperature Boundary Condition
2.2.2. Heat Flux Boundary Condition
2.2.3. Convection Boundary Condition
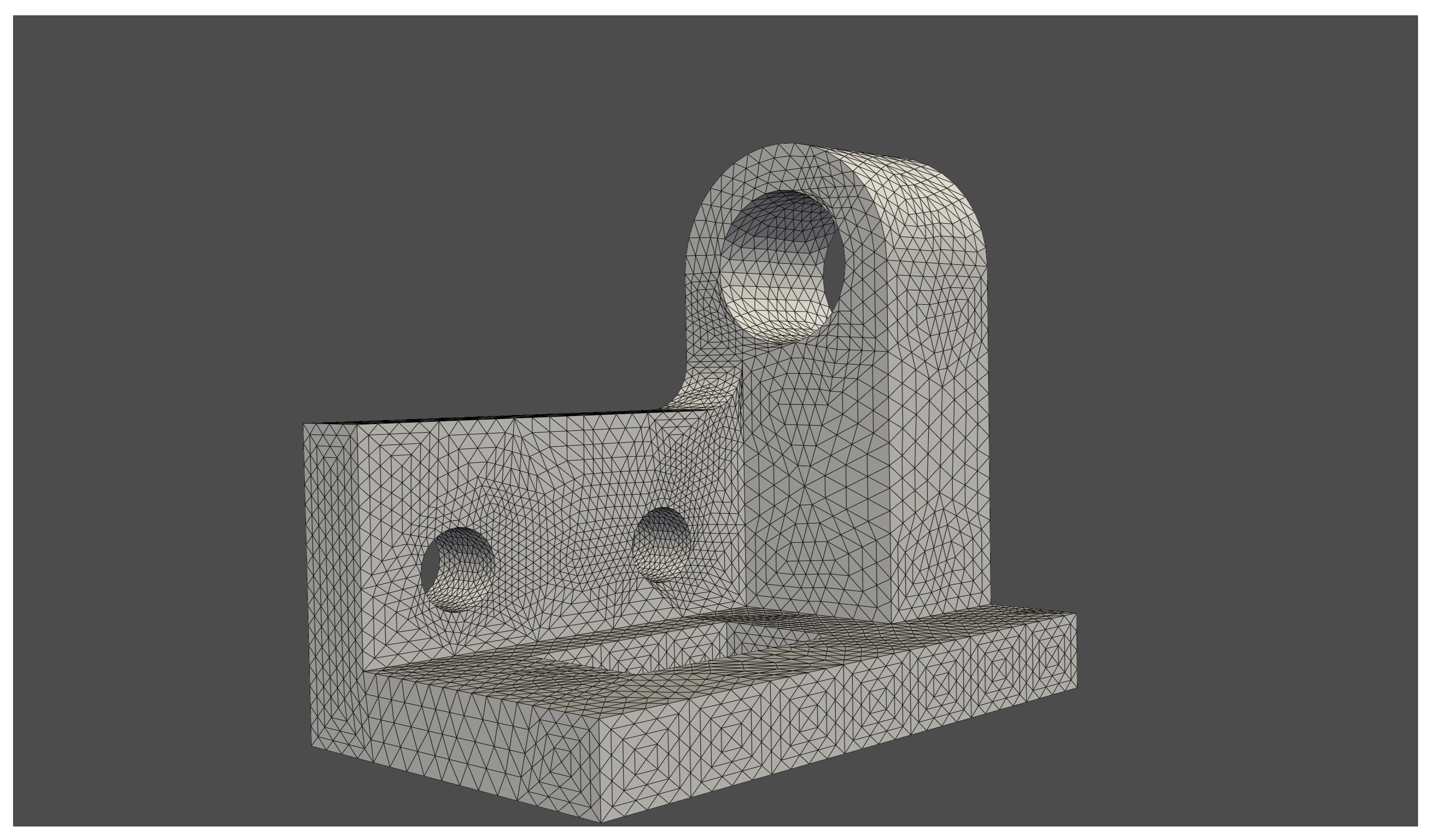
3. Bracket Geometry
4. Steady Heat Conduction
4.1. Variational Formulation
4.2. FEniCSx Implementation
4.2.1. Importing the Mesh
4.2.2. Defining the Function Space
4.2.3. Defining the Variational Form and Boundary Conditions
4.2.4. Solving the Linear Variational Problem
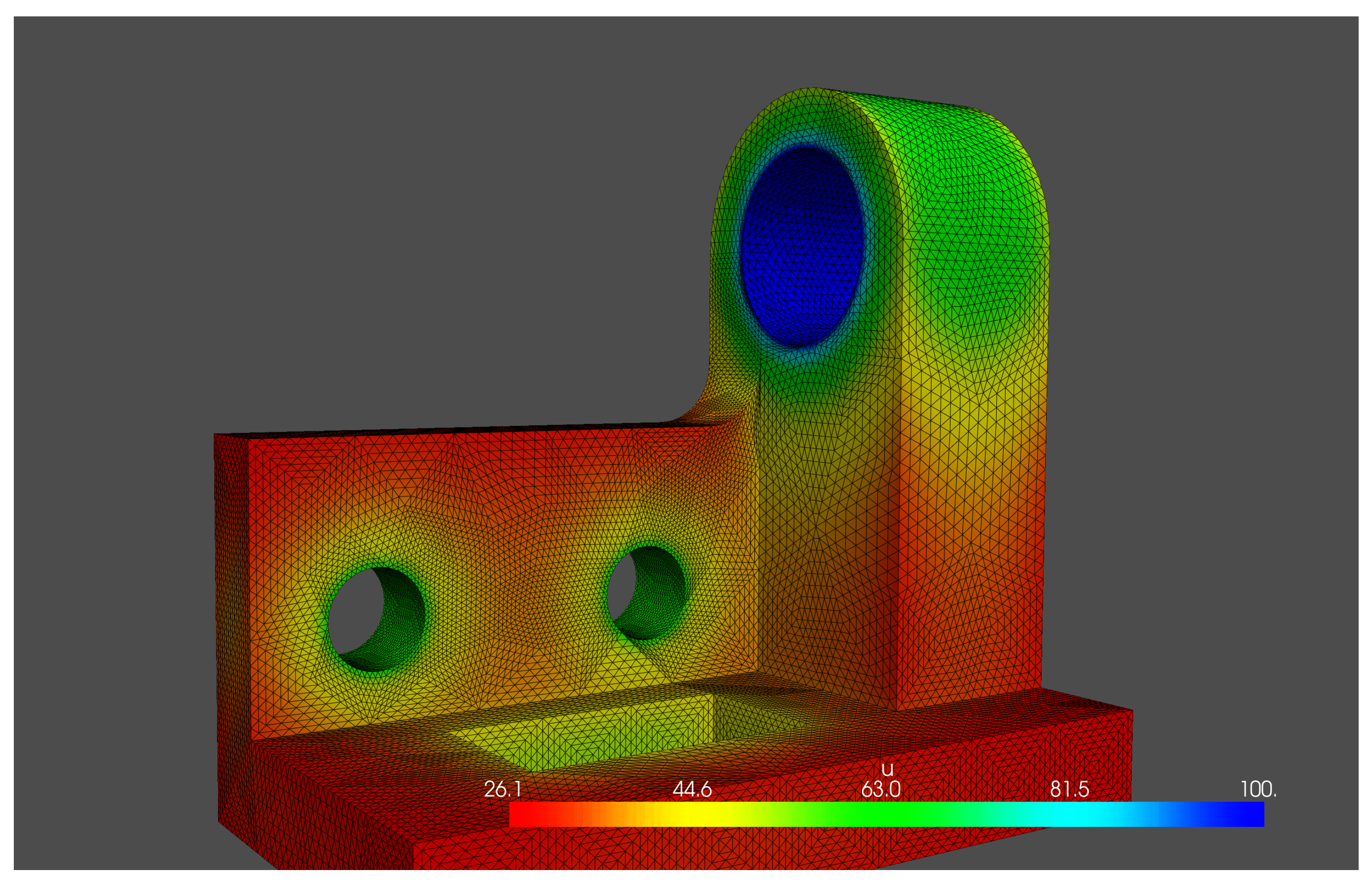
4.3. Results
5. Transient Heat Conduction
5.1. Variational Formulation
5.2. FEniCSx Implementation
5.2.1. Boundary Conditions
5.2.2. Temporal Parameters
- Start Time t = 0 s;
- Final Time T = 5 s;
- Step Size dt = 0.05 s;
- Number of time steps = T/dt = 100 steps.
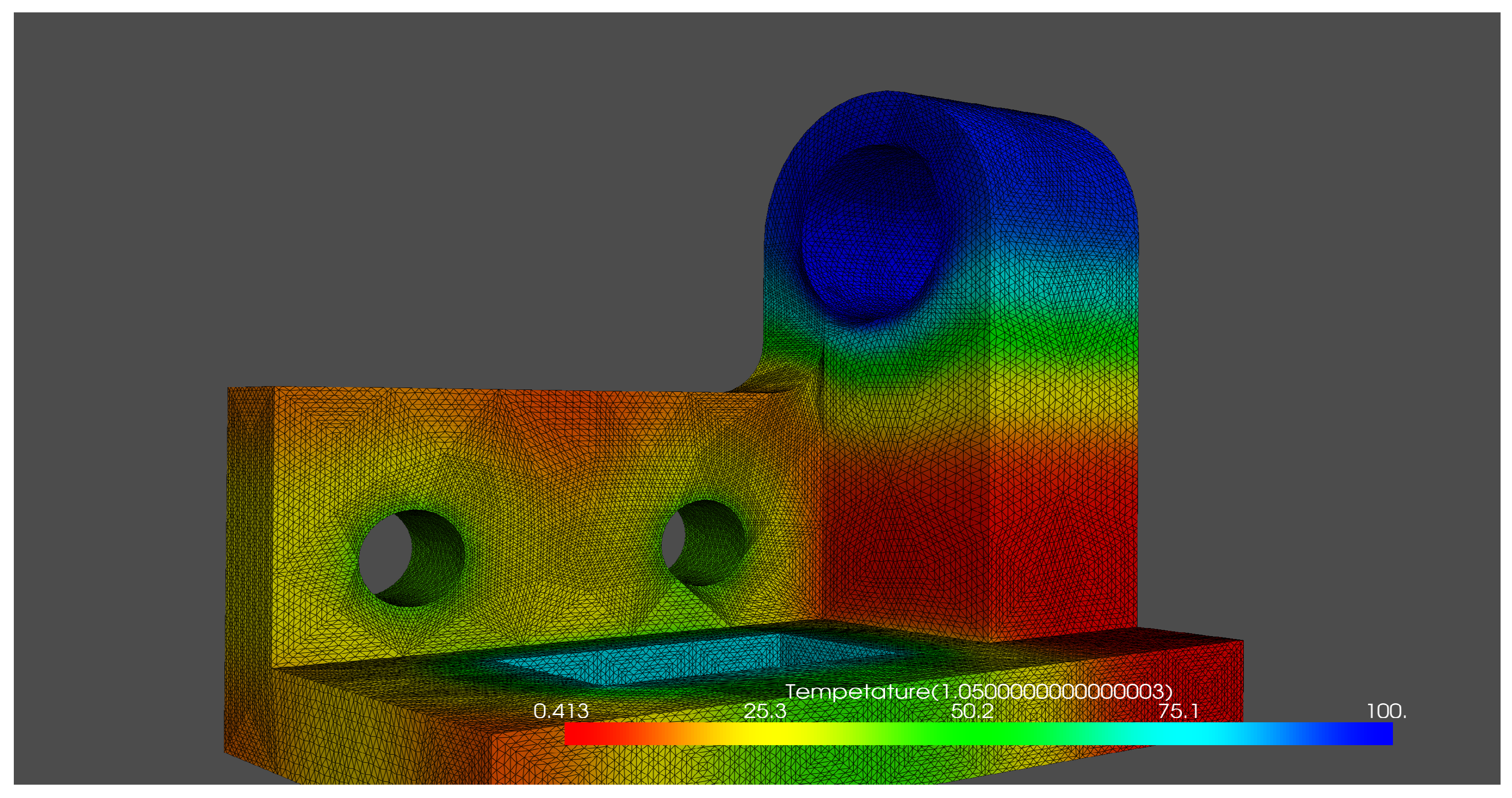
5.3. Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations and Nomenclature
| FEM | Finite Element Method |
| PDE | Partial Differential Equation |
| UFL | Unified Form Language |
| CG | Conjugate Gradient |
| BC | Boundary Condition |
| u | Trial Function |
| Dirichlet BC | |
| Boundary with Dirichlet BC | |
| Boundary with Neumann BC | |
| Boundary with Robin BC | |
| Spatial Domain | |
| v | Test Function |
| u at time level n | |
| DOF | Degree of Freedom |
| HO | Higher Order |
References
- Kareem Jalghaf, H.; Omle, I.; Kovács, E. A Comparative Study of Explicit and Stable Time Integration Schemes for Heat Conduction in an Insulated Wall. Buildings 2022, 12, 824. [Google Scholar] [CrossRef]
- Dokken, J.S.; Mitusch, S.K.; Funke, S.W. Automatic shape derivatives for transient PDEs in FEniCS and Firedrake. arXiv 2020, arXiv:2001.10058. [Google Scholar]
- Cook, R.D.; Malkus, D.S.; Plesha, M.E.; Witt, R.J. Concepts and Applications of Finite Element Analysis; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Susanne, C.; Brenner, L. Ridgway Scott The Mathematical Theory of Finite Element Methods; Springer: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Smitha, T.V.; Nagaraja, K.V. An efficient automated higher-order finite element computation technique using parabolic arcs for planar and multiply-connected energy problems. Energy 2019, 183, 996–1011. [Google Scholar] [CrossRef]
- Supriya, D.; Nagaraja, K.V.; Smitha, T.V.; Jayan, S. Accurate higher order automated unstructured triangular meshes for airfoil designs in aerospace applications using parabolic arcs. Aerosp. Sci. Technol. 2019, 88, 405–420. [Google Scholar]
- Zhang, J.; Chauhan, S. Fast explicit dynamics finite element algorithm for transient heat transfer. Int. J. Therm. Sci. 2019, 139, 160–175. [Google Scholar] [CrossRef] [Green Version]
- Bergagio, M.; Li, H.; Anglart, H. An iterative finite-element algorithm for solving two-dimensional nonlinear inverse heat conduction problems. Int. J. Heat Mass Transf. 2018, 126, 281–292. [Google Scholar] [CrossRef]
- Kudela, L.; Chýlek, R.; Pospíšil, J. Efficient Integration of Machine Learning into District Heating Predictive Models. Energies 2020, 13, 6381. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, L.; Feng, Y.; Zhao, Y. Three-Dimensional Streamline Tracing Method over Tetrahedral Domains. Energies 2020, 13, 6027. [Google Scholar] [CrossRef]
- Alnaes, M.S.; Blechta, J.; Hake, J.; Johansson, A.; Kehlet, B.; Logg, A.; Richardson, C.; Ring, J.; Rognes, M.E.; Wells, G.N. The FEniCS Project Version 1.5. In Archive of Numerical Software 3; 2015; Available online: https://publications.lib.chalmers.se/records/fulltext/228672/local_228672.pdf (accessed on 1 October 2022).
- Logg, A.; Mardal, K.A.; Wells, G. Automated Solution of Differential Equations by the Finite Element Method; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar] [CrossRef]
- Habera, M.; Hale, J.S.; Richardson, C.N.; Ring, J.; Rognes, M.E.; Sime, N.; Wells, G.N. FEniCSX: A sustainable future for the FEniCS project. In SIAM PP20 Minisymposium: Improving Productivity and Sustainability for Parallel Computing Software; Seattle, WA, USA, 2020; Available online: https://fenicsproject.org/citing/ (accessed on 1 October 2022).
- Alnaes, M.S.; Logg, A.; Ølgaard, K.B.; Rognes, M.E.; Wells, G.N. Unified Form Language: A domain-specific language for weak formulations of partial differential equations. ACM Trans. Math. Softw. 2014, 40, 1–37. [Google Scholar] [CrossRef]
- Scroggs, M.W.; Dokken, J.S.; Richardson, C.N.; Wells, G.N. Construction of arbitrary order finite element degree-of-freedom maps on polygonal and polyhedral cell meshes. ACM Trans. Math. Softw. 2022, 48, 1–23. [Google Scholar] [CrossRef]
- Scroggs, M.W.; Baratta, I.A.; Richardson, C.N.; Wells, G.N. Basix: A runtime finite element basis evaluation library. J. Open Source Softw. 2022, 7, 3982. [Google Scholar] [CrossRef]
- Kirby, R.C.; Logg, A. A compiler for variational forms. ACM Trans. Math. Softw. 2006, 32, 417–444. [Google Scholar] [CrossRef] [Green Version]
- Geuzaine, C.; Remacle, J.-F. Gmsh: A three-dimensional finite element mesh generator with built-in pre- and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Sullivan, C.; Kaszynski, A. PyVista: 3D plotting and mesh analysis through a streamlined interface for the Visualization Toolkit (VTK). J. Open Source Softw. 2019, 4, 1450. [Google Scholar] [CrossRef]
- Ahrens, J.; Geveci, B.; Law, C. ParaView: An End-User Tool for Large Data Visualization. In Visualization Handbook; Elsevier: Amsterdam, The Netherlands, 2005; ISBN -13: 978-0123875822. [Google Scholar]
- Ayachit, U. The ParaView Guide: A Parallel Visualization Application; Kitware: New York, NY, USA, 2015; ISBN 978-1930934306. [Google Scholar]
- Van Der Vorst, H.A. Krylov Subspace Iteration. Comput. Sci. Eng. 2000, 2, 32–37. [Google Scholar] [CrossRef]
- Gao, C.; Liu, Y.; You, R.; Li, H. Theoretical and Numerical Study on Thermal Insulation Performance of Thermal Barrier Coatings. Energies 2022, 15, 6880. [Google Scholar] [CrossRef]
- Moumtzakis, A.; Zoras, S.; Evagelopoulos, V.; Dimoudi, A. Experimental Investigation of Thermal Bridges and Heat Transfer through Window Frame Elements at Achieving Energy Saving. Energies 2022, 15, 5055. [Google Scholar] [CrossRef]
- Cengel, Y.A.; Ghajar, A.J. Heat and Mass Transfer: Fundamentals and Applications, 6th ed.; McGraw-Hill Professional: New York, NY, USA, 2020. [Google Scholar]
- Piasecka, M.; Maciejewska, B.; Łabędzki, P. Heat Transfer Coefficient Determination during FC-72 Flow in a Minichannel Heat Sink Using the Trefftz Functions and ADINA Software. Energies 2020, 13, 6647. [Google Scholar] [CrossRef]
- He, J.; Wang, K.; Li, J. Numerical Analysis of the Convective Heat Transfer Coefficient Enhancement of a Pyro-Breaker Utilized in Superconducting Fusion Facilities. Energies 2021, 14, 7565. [Google Scholar] [CrossRef]
- Langtangen, H.P.; Logg, A. Solving PDEs in Python The FEniCS Tutorial I; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Reddy, J.N.; Gartling, D.K. The Finite Element Method in Heat Transfer and Fluid Dynamics; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar] [CrossRef]
- Langtangen, H.P.; Mardal, K.-A. Introduction to Numerical Methods for Variational Problems; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Larson, M.G.; Bengzon, F. The Finite Element Method:Theory, Implementation, and Applications. In Texts in Computational Science and Engineering; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Smitha, T.V.; Nagaraja, K.V. Application of automated cubic-order mesh generation for efficient energy transfer using parabolic arcs for microwave problems. Energy 2019, 168, 1104–1108. [Google Scholar] [CrossRef]
- Kumar, S.; Jakkareddy, P.S.; Balaji, C. A novel method to detect hot spots and estimate strengths of discrete heat sources using liquid crystal thermography. Int. J. Therm. Sci. 2020, 154, 106377. [Google Scholar] [CrossRef]
- McDonagh, J.; Palumbo, N.; Cherukunnath, N.; Dimov, N.; Yousif, N. Modelling a permanent magnet synchronous motor in FEniCSx for parallel high-performance simulations. Finite Elem. Anal. Des. 2022, 204, 103755. [Google Scholar] [CrossRef]
- Singh, P. Errors Incurred in Local Convective Heat Transfer Coefficients Obtained through Transient One-Dimensional Semi-Infinite Conduction Modeling: A Computational Heat Transfer Study. Energies 2022, 15, 7001. [Google Scholar] [CrossRef]
- Jakkareddy, P.S.; Balaji, C. Estimation of local heat transfer coefficient from natural convection experiments using liquid crystal thermography and Bayesian method. Exp. Therm. Fluid Sci. 2018, 97, 458–467. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | DOFs | Direct Solver | Krylov Solver(CG) |
|---|---|---|---|
| 1 | 15,603 | 2.342662 s | 1.241860 s |
| 2 | 111,273 | 59.647889 s | 2.411070 s |
| 3 | 360,543 | 561.680618 s | 9.031274 s |
| 4 | 836,949 | 5047.619034 s | 31.712334 s |
| 5 | 1,614,027 | 45,448.596721 s | 115.382458 s |
| Order | DOFs | Direct Solver | Krylov Solver (CG) |
|---|---|---|---|
| 1 | 15,603 | 80.71472 s | 8.6550031 s |
| 2 | 111,273 | 4803.45891 s | 68.042709 s |
| 3 | 360,543 | 21,769.80122 s | 418.93187 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, V.; Chandan, K.; Nagaraja, K.V.; Reddy, M.V. Heat Conduction with Krylov Subspace Method Using FEniCSx. Energies 2022, 15, 8077. https://doi.org/10.3390/en15218077
Kumar V, Chandan K, Nagaraja KV, Reddy MV. Heat Conduction with Krylov Subspace Method Using FEniCSx. Energies. 2022; 15(21):8077. https://doi.org/10.3390/en15218077
Chicago/Turabian StyleKumar, Varun, K. Chandan, K. V. Nagaraja, and M. V. Reddy. 2022. "Heat Conduction with Krylov Subspace Method Using FEniCSx" Energies 15, no. 21: 8077. https://doi.org/10.3390/en15218077