
A Current Sensorless Control of Buck-Boost Converter for Maximum Power Point Tracking in Photovoltaic Applications
 , , and
, , and 
Abstract
:1. Introduction
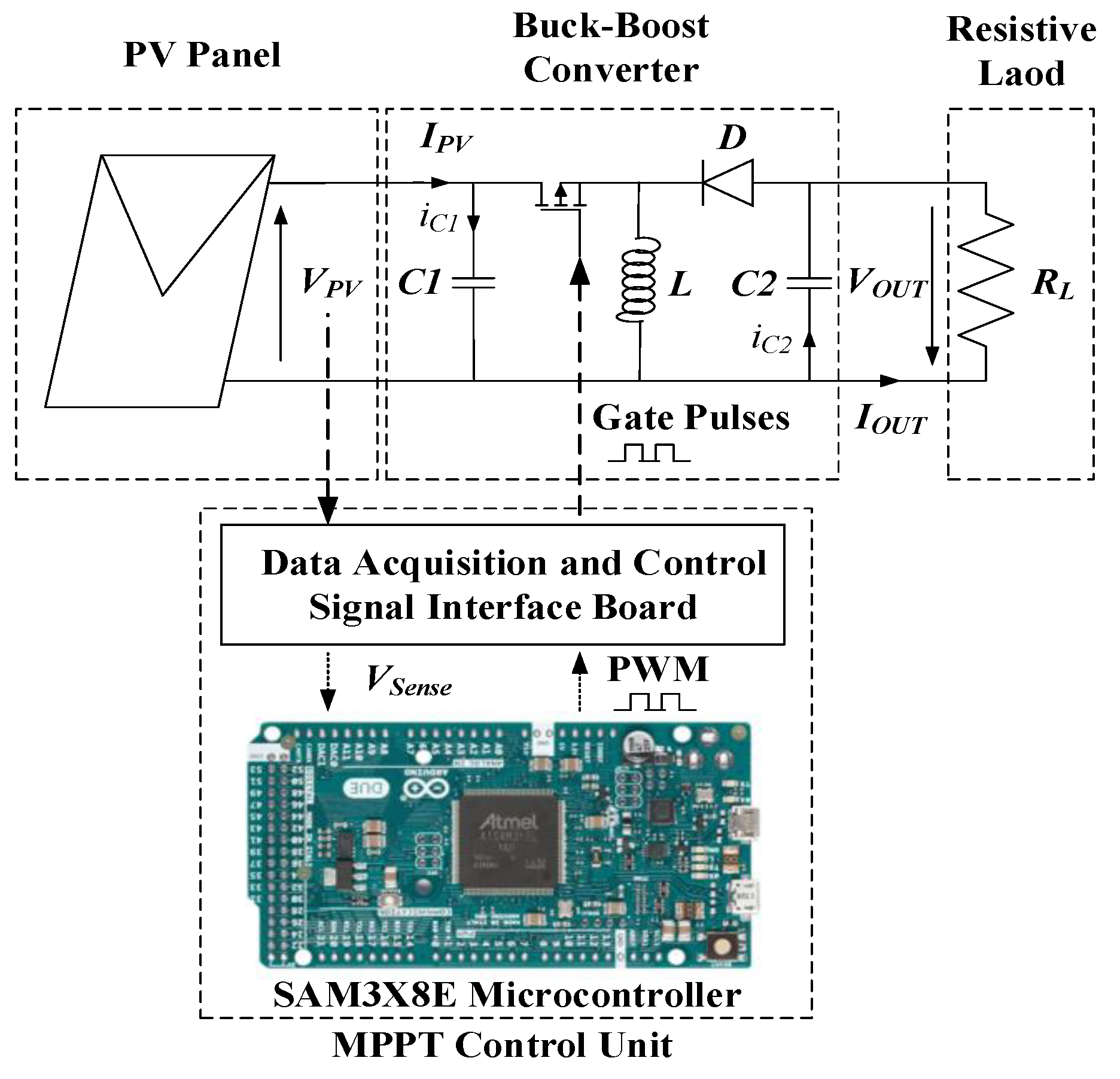
2. The PV System under Study
3. The Proposed Current Sensorless MPPT Algorithm
3.1. Establishment of the Objective Function from the Mathematical Model of the Buck-Boost Converter
3.2. Stability Requirement Analysis of Q Using Lyapunov’s Second Method
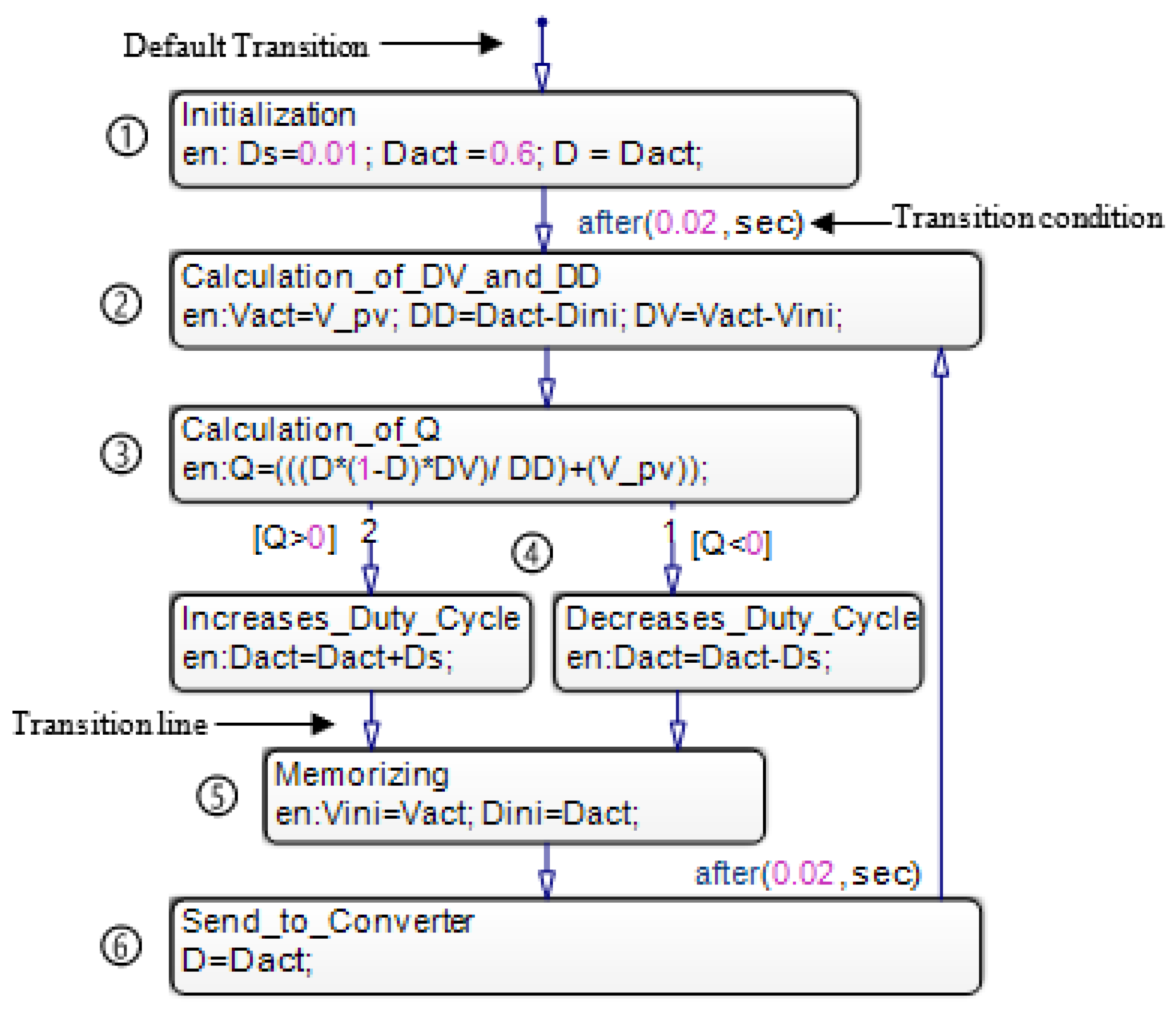
3.3. Description of the Proposed CSL-MPPT
- Step ①: Initialization of the duty cycle D based on (3).
- Step ②: Sensing VPV and calculation of ∆V and ∆D.
- Step ③: Calculation of Q using (13).
- Step ④: Decision of the direction of perturbation of D.
- Step ⑤: Storage of the actual values of the D and VPV.
- Step ⑥: Transmitting the updated D to the converter.
- The initialization of D and the step-size of the duty cycle perturbation (DS) are made in the first state labeled ①.
- VPV sensed after TS = 20 ms and ΔV, ΔD, denoted by DV, DD, respectively, can be calculated during state ② activation.
- In state ③, ΔV, and ΔD values are used to calculate Q.
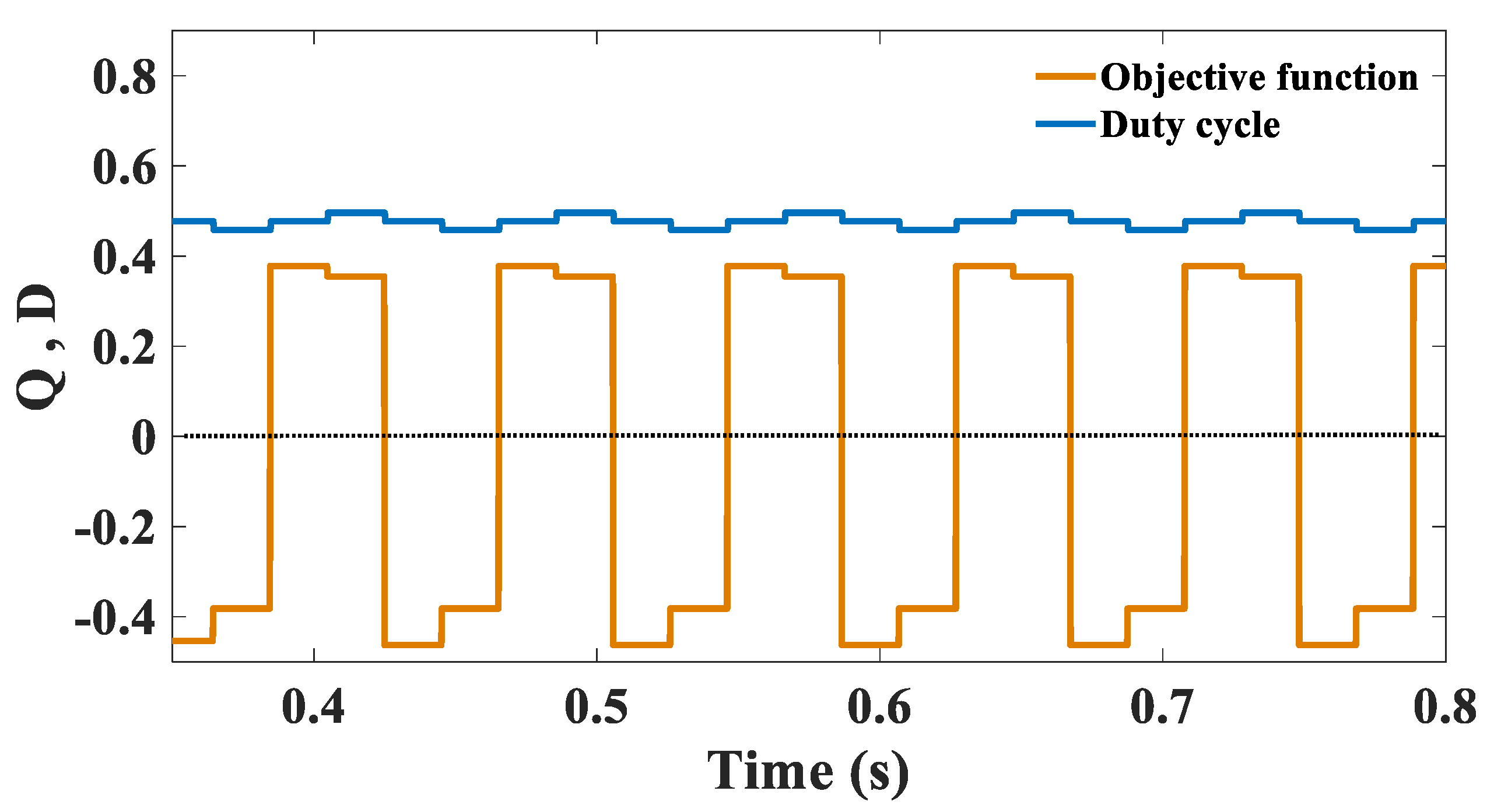
- The decision of the perturbation direction of D is made by executing either Increases_Duty_Cycle or Decreases_Duty_Cycle states ④, depending on the sign of Q.
- In state ⑤, the actual values of VPV and D are stored for the next MPPT cycle.
- The updated D is transmitted to the converter in state ⑥.
4. Simulation of the Proposed CSL-MPPT Method
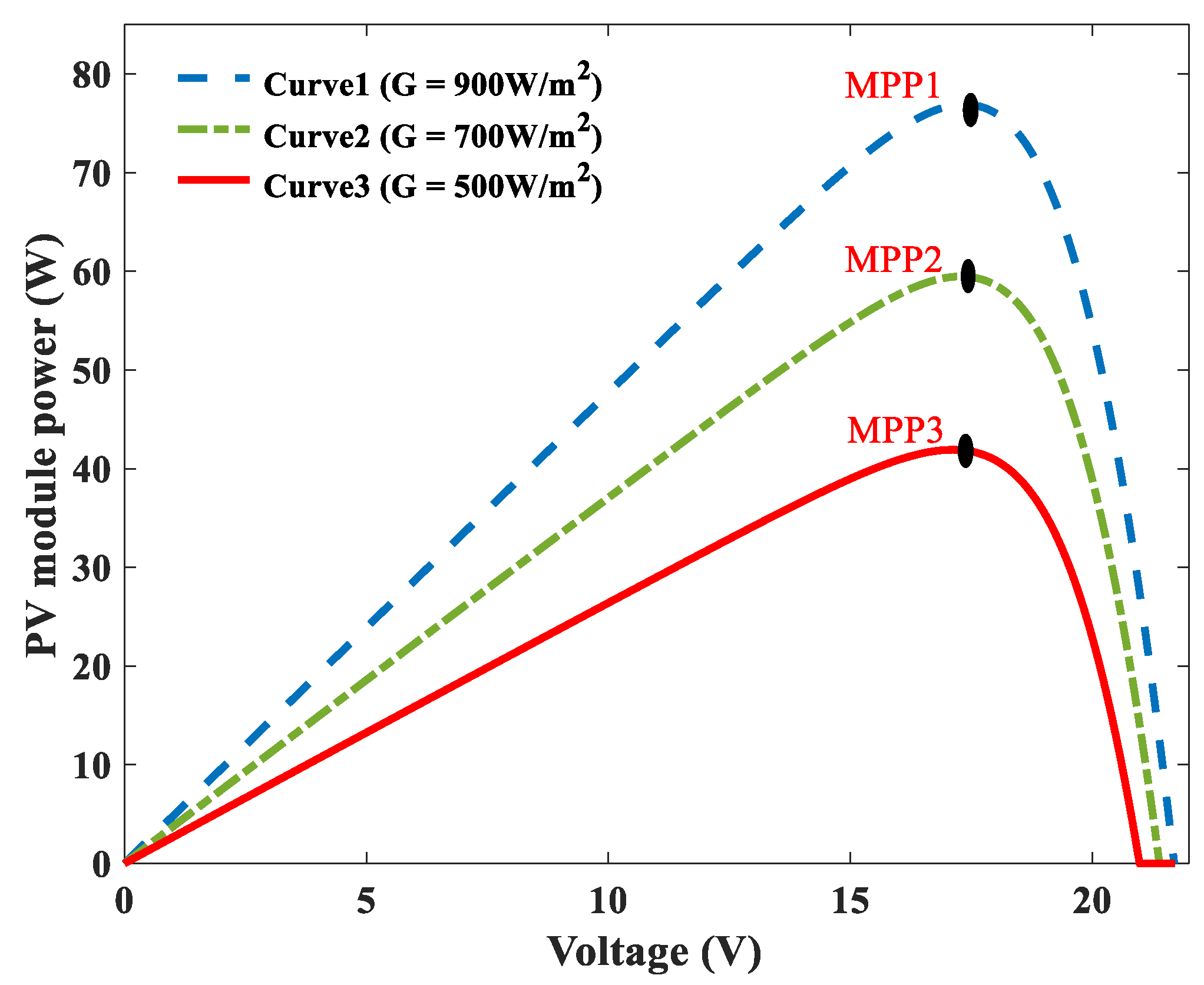
4.1. The Test Environment Used for Simulation
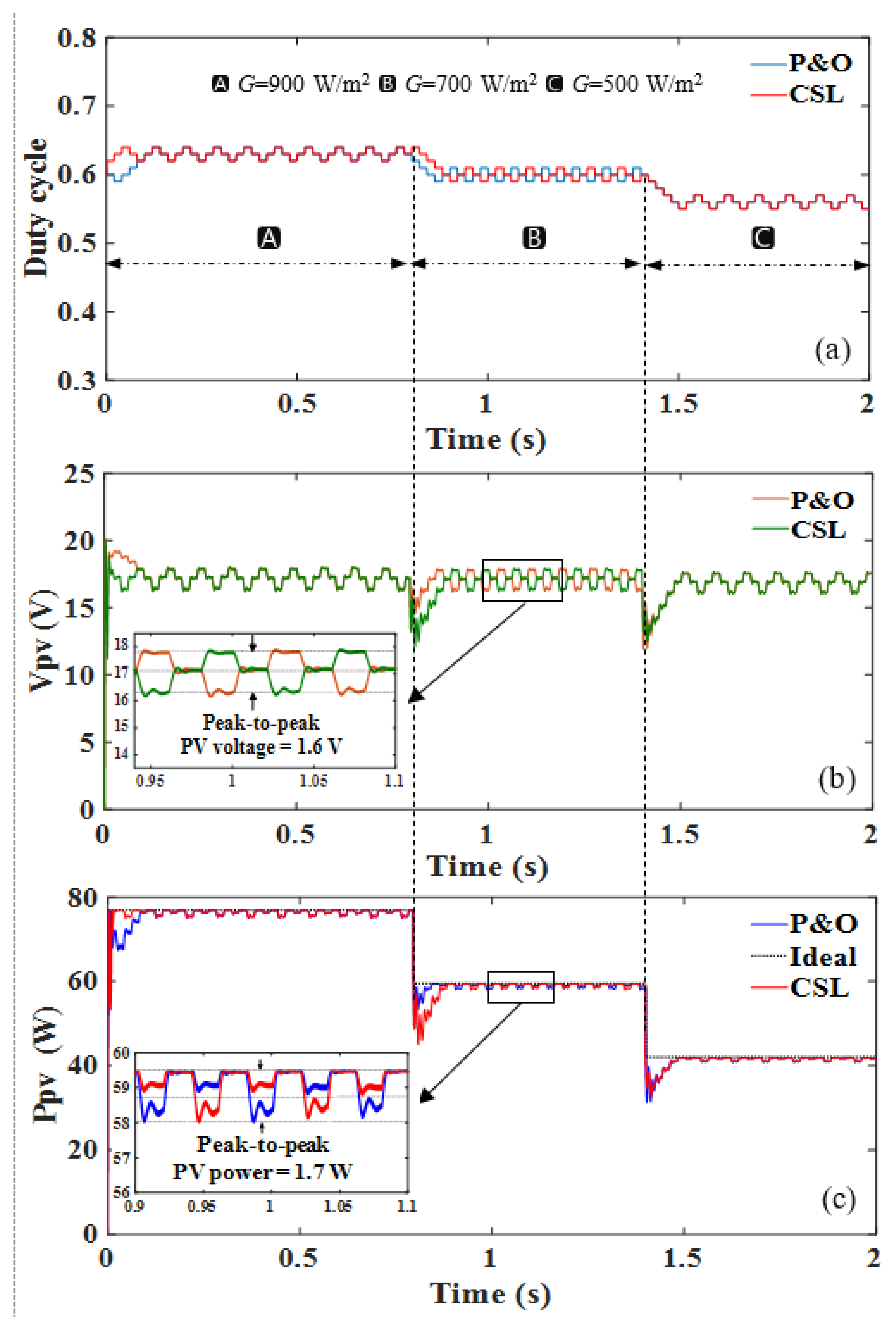
4.2. Results and Discussion
5. Hardware Validation
5.1. Experimental Set-Up
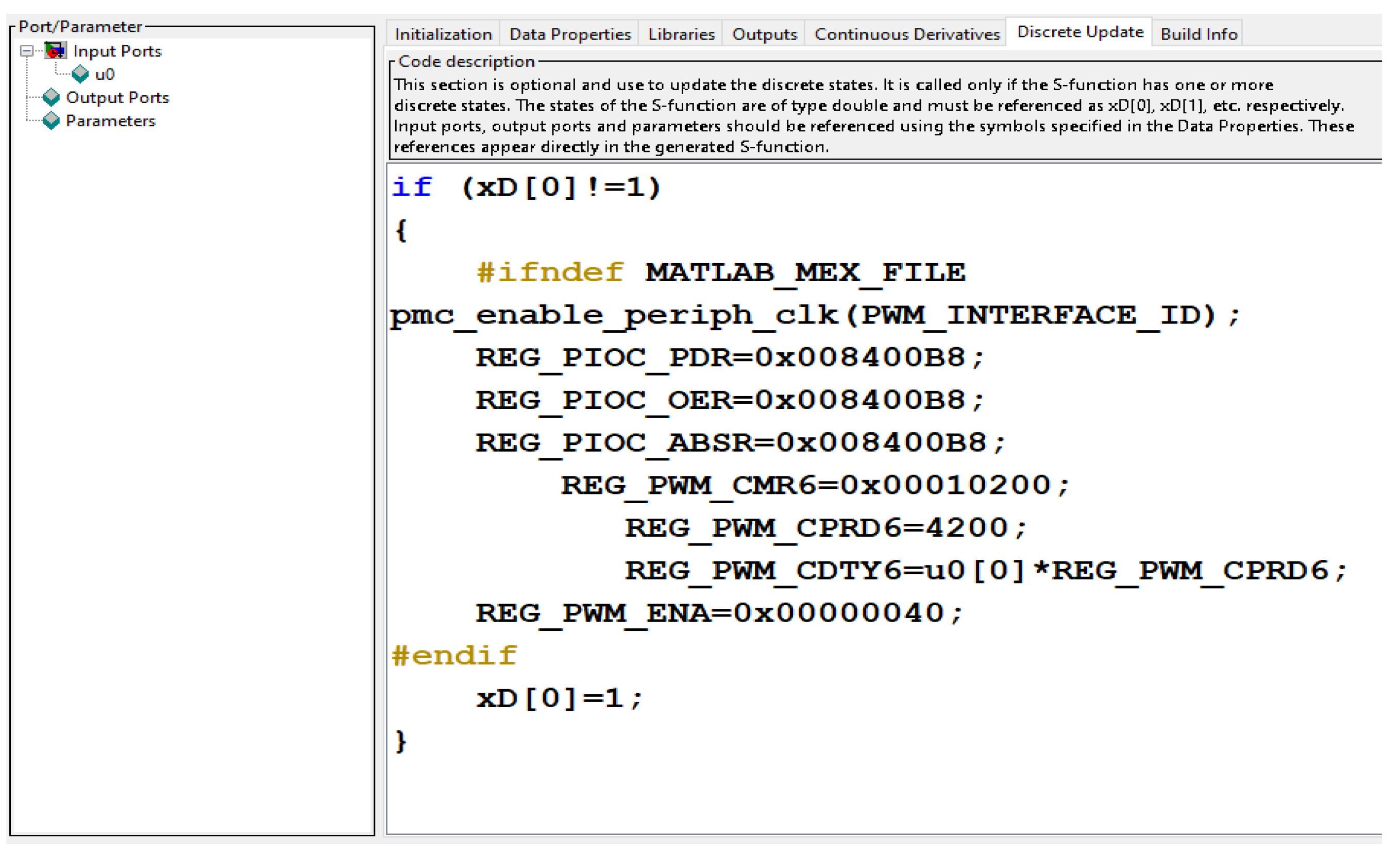
- Multiplexing the parallel input/output of port C (PIOC) with PWM channel 6 output: The register REG_PIOC_PDR is used to disable PIOC; then, the REG_PIOC_ABSR register is used to assign the PIOC to peripheral A or B; after that, the PIOC is enabled again by using REG_PIOC_OER.
- Switching the frequency configuration: the channel mode register REG_PWM_CMR6 is used to set the required clock of channel 6 and the characteristics of the output waveforms. Then, the value of REG_PWM_CPRD6 is calculated such that the required frequency can be accurately generated, i.e., to get a 20 kHz-switching frequency, since the master clock (84 MHz) is selected, the value of REG_PWM_CPRD6 is obtained as follows: 84 MHz/20 KHz = 4200.
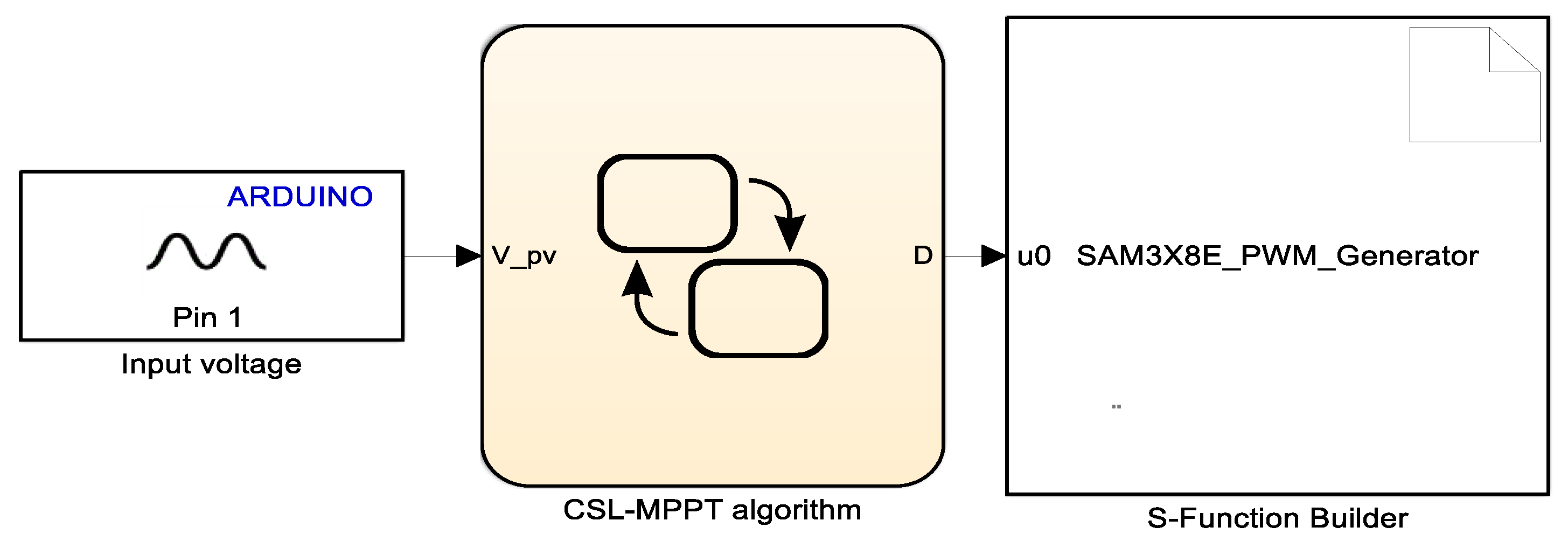
- Updating the duty cycle value: the updating value of the duty cycle is configured through the REG_PWM_CDTY6 register as follows: REG_PWM_CDTY6 = u0[0] × REG_PWM_CPRD6, where u0[0] contains the computed duty cycle value obtained from the Stateflow of the CSL-MPPT algorithm [34].
5.2. Experimental Results and Discussion
5.2.1. Experimental Validation under the Irradiance Change Test:
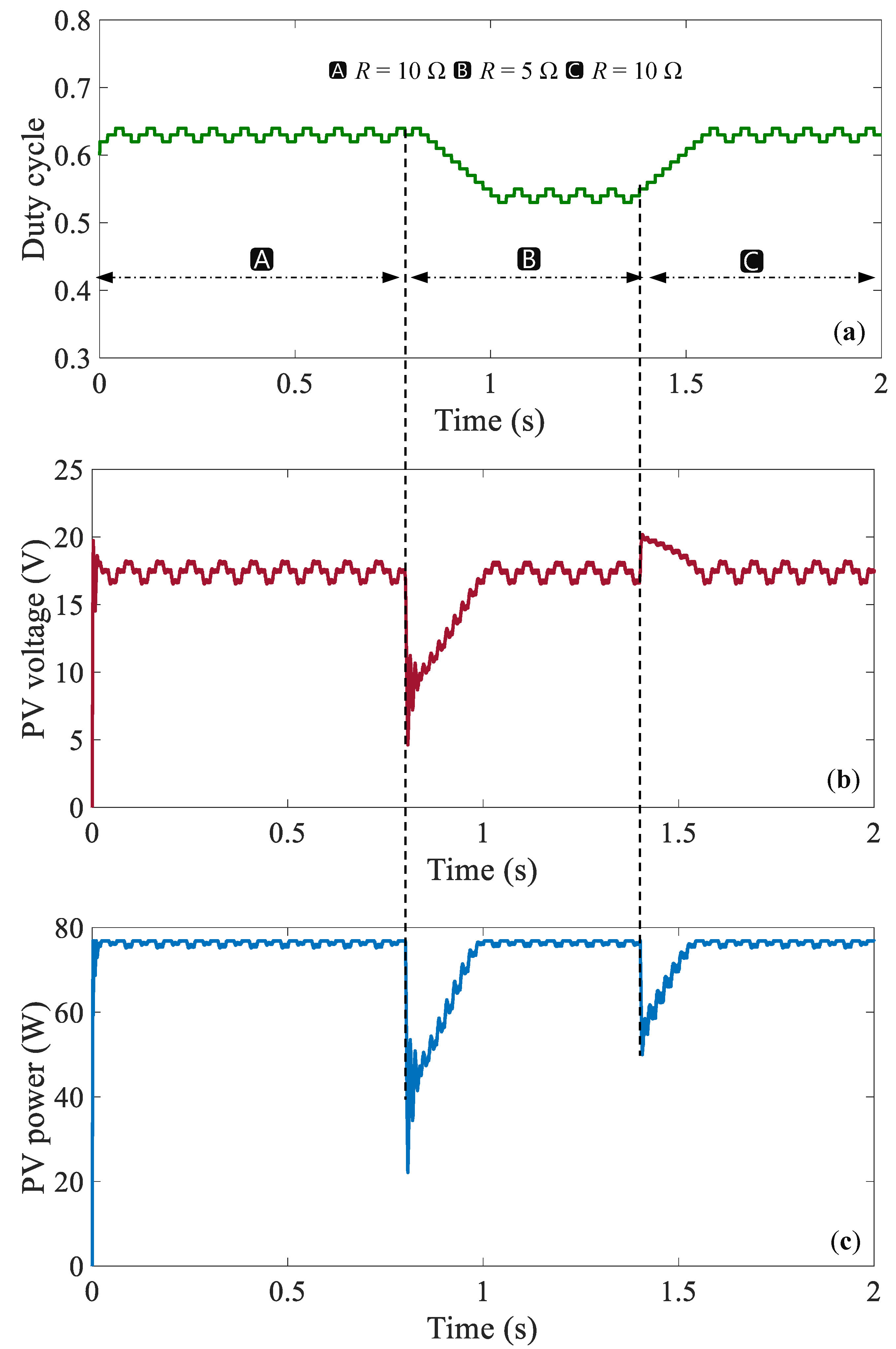
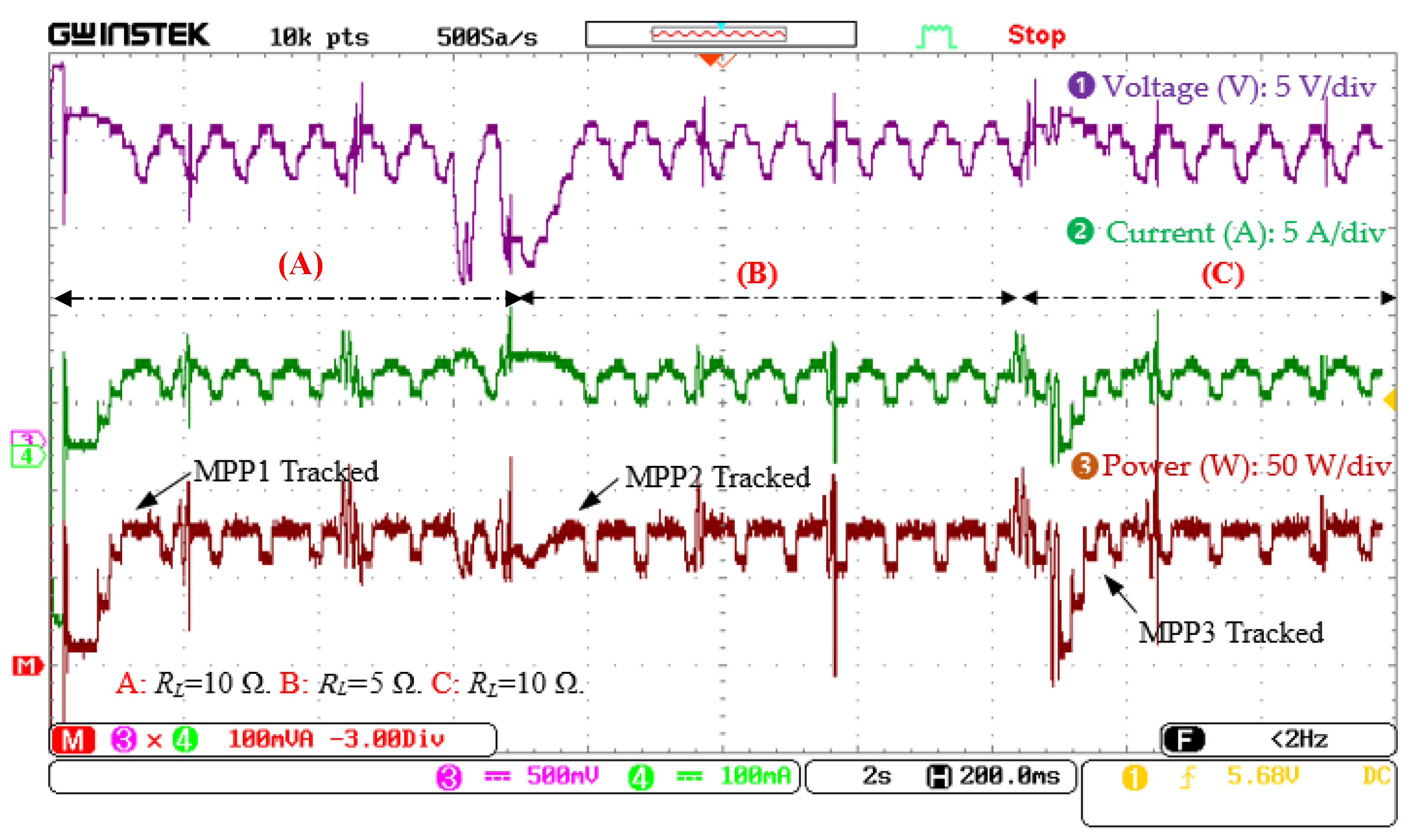
5.2.2. Experimental Validation in Presence of Load Disturbances
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Achour, L.; Bouharkat, M.; Assas, O.; Behar, O. Hybrid model for estimating monthly global solar radiation for the Southern of Algeria:(Case study: Tamanrasset, Algeria). Energy 2017, 135, 526–539. [Google Scholar] [CrossRef]
- Kok Soon, T.; Mekhilef, S.; Safari, A. Simple and low cost incremental conductance maximum power point tracking using buck-boost converter. J. Renew. Sustain. Energy 2013, 5, 023106. [Google Scholar] [CrossRef]
- Azevedo, G.; Cavalcanti, M.; Oliveira, K.; Neves, F.; Lins, Z. Comparative evaluation of maximum power point tracking methods for photovoltaic systems. J. Sol. Energy Eng. 2009, 131, 031006. [Google Scholar] [CrossRef]
- Kjær, S.B. Evaluation of the “hill climbing” and the “incremental conductance” maximum power point trackers for photovoltaic power systems. IEEE Trans. Energy Convers. 2012, 27, 922–929. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. An enhanced adaptive P&O MPPT for fast and efficient tracking under varying environmental conditions. IEEE Trans. Sustain. Energy 2018, 9, 1487–1496. [Google Scholar]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter. IEEE Trans. Ind. Electron. 2010, 58, 1154–1161. [Google Scholar] [CrossRef]
- Huynh, D.C.; Dunnigan, M.W. Development and comparison of an improved incremental conductance algorithm for tracking the MPP of a solar PV panel. IEEE Trans. Sustain. Energy 2016, 7, 1421–1429. [Google Scholar] [CrossRef]
- Lashab, A.; Sera, D.; Guerrero, J.M. A dual-discrete model predictive control-based MPPT for PV systems. IEEE Trans. Power Electron. 2019, 34, 9686–9697. [Google Scholar] [CrossRef] [Green Version]
- Valenciaga, F.; Inthamoussou, F. A novel PV-MPPT method based on a second order sliding mode gradient observer. Energy Convers. Manag. 2018, 176, 422–430. [Google Scholar] [CrossRef]
- Bawa, D.; Patil, C. Fuzzy control based solar tracker using Arduino Uno. Int. J. Eng. Innov. Technol. 2013, 2, 179–187. [Google Scholar]
- Kermadi, M.; Berkouk, E.M. Artificial intelligence-based maximum power point tracking controllers for Photovoltaic systems: Comparative study. Renew. Sustain. Energy Rev. 2017, 69, 369–386. [Google Scholar] [CrossRef]
- Labbi, Y.; Attous, D.B. Maximum Photovoltaic Power Tracking under Different Conditions Using a Genetic Algorithm and Particle Swarm Optimization. J. Electr. Control Eng. Dec 2012, 2, 7–13. [Google Scholar]
- Ram, J.P.; Rajasekar, N. A novel flower pollination based global maximum power point method for solar maximum power point tracking. IEEE Trans. Power Electron. 2016, 32, 8486–8499. [Google Scholar]
- Du, Y.; Yan, K.; Ren, Z.; Xiao, W. Designing localized MPPT for PV systems using fuzzy-weighted extreme learning machine. Energies 2018, 11, 2615. [Google Scholar] [CrossRef] [Green Version]
- Pillai, D.S.; Ram, J.P.; Ghias, A.M.; Mahmud, M.A.; Rajasekar, N. An Accurate, Shade Detection-Based Hybrid Maximum Power Point Tracking Approach for PV Systems. IEEE Trans. Power Electron. 2019, 35, 6594–6608. [Google Scholar] [CrossRef]
- Fannakh, M.; Elhafyani, M.L.; Zouggar, S. Hardware implementation of the fuzzy logic MPPT in an Arduino card using a Simulink support package for PV application. IET Renew. Power Gener. 2018, 13, 510–518. [Google Scholar] [CrossRef]
- Killi, M.; Samanta, S. An adaptive voltage-sensor-based MPPT for photovoltaic systems with SEPIC converter including steady-state and drift analysis. IEEE Trans. Ind. Electron. 2015, 62, 7609–7619. [Google Scholar] [CrossRef]
- Motahhir, S.; Chalh, A.; El Ghzizal, A.; Derouich, A. Development of a low-cost PV system using an improved INC algorithm and a PV panel Proteus model. J. Clean. Prod. 2018, 204, 355–365. [Google Scholar] [CrossRef]
- Killi, M.; Samanta, S. Voltage-Sensor-Based MPPT for Stand-Alone PV Systems Through Voltage Reference Control. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 1399–1407. [Google Scholar] [CrossRef]
- Dasgupta, N.; Pandey, A.; Mukerjee, A.K. Voltage-sensing-based photovoltaic MPPT with improved tracking and drift avoidance capabilities. Sol. Energy Mater. Sol. Cells 2008, 92, 1552–1558. [Google Scholar] [CrossRef]
- Metry, M.; Shadmand, M.B.; Balog, R.S.; Abu-Rub, H. MPPT of photovoltaic systems using sensorless current-based model predictive control. IEEE Trans. Ind. Appl. 2016, 53, 1157–1167. [Google Scholar] [CrossRef]
- Veerachary, M.; Senjyu, T.; Uezato, K. Voltage-based maximum power point tracking control of PV system. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 262–270. [Google Scholar] [CrossRef] [Green Version]
- Harrag, A.; Messalti, S.; Daili, Y. Innovative Single Sensor Neural Network PV MPPT. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 1895–1899. [Google Scholar]
- Kermadi, M.; Mekhilef, S.; Salam, Z.; Ahmed, J.; Berkouk, E.M. Assessment of maximum power point trackers performance using direct and indirect control methods. Int. Trans. Electr. Energy Syst. 2020, 30, e12565. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Shamsudin, A.; Amjad, M. A direct control based maximum power point tracking method for photovoltaic system under partial shading conditions using particle swarm optimization algorithm. Appl. Energy 2012, 99, 414–422. [Google Scholar] [CrossRef]
- Kermadi, M.; Salam, Z.; Ahmed, J.; Berkouk, E.M. An effective hybrid maximum power point tracker of photovoltaic arrays for complex partial shading conditions. IEEE Trans. Ind. Electron. 2018, 66, 6990–7000. [Google Scholar] [CrossRef]
- Loukriz, A.; Haddadi, M.; Messalti, S. Simulation and experimental design of a new advanced variable step size Incremental Conductance MPPT algorithm for PV systems. ISA Trans. 2016, 62, 30–38. [Google Scholar] [CrossRef] [PubMed]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Kermadi, M.; Salam, Z.; Berkouk, E.M. A rule-based power management controller using stateflow for grid-connected PV-battery energy system supplying household load. In Proceedings of the 2018 9th IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 25–28 June 2018; pp. 1–6. [Google Scholar]
- Bründlinger, R.; Henze, N.; Häberlin, H.; Burger, B.; Bergmann, A.; Baumgartner, F. prEN 50530–The New European Standard for Performance Characterisation of PV Inverters. In Proceedings of the 24th European Photovoltaic Solar Energy Conference, Hamburg, Germany, 21–24 September 2009; pp. 3105–3109. [Google Scholar]
- Zurbriggen, I.G.; Ordonez, M. PV Energy Harvesting Under Extremely Fast Changing Irradiance: State-Plane Direct MPPT. IEEE Trans. Ind. Electron. 2019, 66, 1852–1861. [Google Scholar] [CrossRef]
- Simulink Support Package for Arduino Hardware. 2020. Available online: https://www.mathworks.com/matlabcentral/fileexchange/40312-simulink-support-package-for-arduino-hardware (accessed on 7 September 2022).
- Atmel. SAM3X/SAM3A Series Datasheet; Atmel Corporation: San Jose, CA, USA, 2015; p. 1459. [Google Scholar]
- Voltage Transducer LV25P. 2020. Available online: https://www.lem.com/sites/default/files/products_datasheets/lv_25-p.pdf (accessed on 3 October 2022).
- Current Transducer LA25-NP/SP25. 2020. Available online: https://www.lem.com/sites/default/files/products_datasheets/la%2025-np%20sp25.pdf (accessed on 3 October 2022).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | MPPT Algorithm | Microcontroller Used |
|---|---|---|
| Killi et al., 2015 [18] | Voltage-based MPPT | Atmega2560 |
| Fannakh et al., 2018 [17] | Fuzzy logic | Atmega2560 |
| Motahir et al., 2018 [19] | Modified Incremental Conductance (IncCond) | Atmega328p |
| Killi et al., 2018 [20] | Voltage-Reference-based MPPT | Atmega2560 |
| Authors | Objective Function (Q) | Converter | Controller Type |
|---|---|---|---|
| Killi et al. [18] | SEPIC | Atmega2560 (AVR core) | |
| Dasgupta et al. [21] | Buck | ADuC831 (8052 core) | |
| Harrag et al. [24] | ANN based on | Boost | Matlab/ Simulink |
| Proposed | Buck-boost | SAM3X8E (ARM-Cortex M3 core) |
| Parameters | Labels | Values |
|---|---|---|
| Max Power | Pmax | 85 W |
| Max Voltage | Vmax | 17.85 V |
| Max current | Imax | 4.77 A |
| Short-Circuit | Isc | 5.15 A |
| Open Circuit voltage | Voc | 21.8 V |
| Temperature coefficient of ISC | KV | 0.06%/°C |
| Temperature coefficient of VOC | KI | −0.35%/°C |
| Number of cells | NS | 36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Obeidi, N.; Kermadi, M.; Belmadani, B.; Allag, A.; Achour, L.; Mekhilef, S. A Current Sensorless Control of Buck-Boost Converter for Maximum Power Point Tracking in Photovoltaic Applications. Energies 2022, 15, 7811. https://doi.org/10.3390/en15207811
Obeidi N, Kermadi M, Belmadani B, Allag A, Achour L, Mekhilef S. A Current Sensorless Control of Buck-Boost Converter for Maximum Power Point Tracking in Photovoltaic Applications. Energies. 2022; 15(20):7811. https://doi.org/10.3390/en15207811
Chicago/Turabian StyleObeidi, Nabil, Mostefa Kermadi, Bachir Belmadani, Abdelkarim Allag, Lazhar Achour, and Saad Mekhilef. 2022. "A Current Sensorless Control of Buck-Boost Converter for Maximum Power Point Tracking in Photovoltaic Applications" Energies 15, no. 20: 7811. https://doi.org/10.3390/en15207811