
Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System

 ,
,  ,
,  ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
- a.
- An LFC-AVR combined model of a two-area system was designed for simultaneous voltage and frequency stabilization.
- b.
- Intelligent-based fuzzy PID was implemented as a secondary regulator in the loops of LFC and AVR.
- c.
- The implementation of fuzzy PID for a combined system has not been reported in the literature so far.
- d.
- The HAEFA algorithm was utilized to tune the parameters of the secondary controller.
- e.
- The supremacy of fuzzy PID was demonstrated with controllers of traditional PI/PID.
- f.
- The necessity of coupling AVR with LFC loop was clearly demonstrated and justified.
- g.
- The performance assessment of different ESDs in a combined effect was analyzed.
2. Methodology
3. System Modeling
3.1. Modeling of LFC Loop
3.2. Modeling of AVR Loop
3.3. Modeling of LFC and AVR Coupling
4. Controller and Objective Function
5. Discussion
5.1. Ultra Capacitors
5.2. Superconducting Magnetic Energy Storage
5.3. Redoxflow Batteries
6. HAEFA Algorithm
7. Simulation Results
7.1. Case-1: Analysis of Combined LFC and AVR System with HAEFA-Tuned Controllers
7.2. Case-2: Analysis of System Performance with and without Considering AVR Coupling
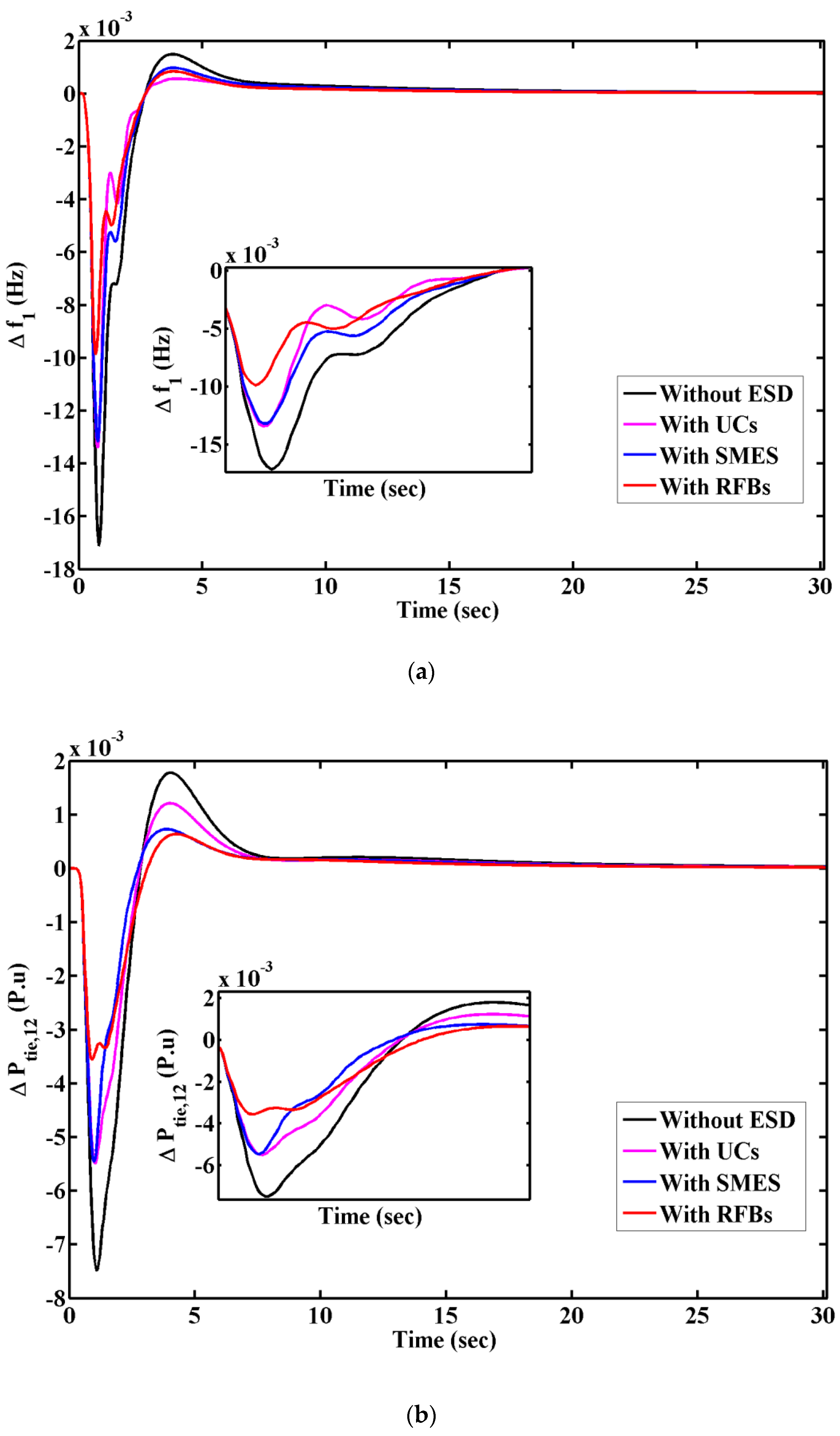
7.3. Case-3: Analysis of Combined LFC and AVR System with Different ESDs
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kalyan, C.S.; Rao, G. Demonstrating the Effect of Excitation Cross Coupling and Communication Time Delays on Automatic Generation Control. In Proceedings of the 2021 4th Biennial International Conference on Nascent Technologies in Engineering (ICNTE), Virtual, 15–16 January 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Fosha, C.E.; Elgerd, O.I. The Megawatt-Frequency Control Problem: A New Approach Via Optimal Control Theory. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 563–577. [Google Scholar] [CrossRef]
- Dhanasekaran, B.; Siddhan, S.; Kaliannan, J. Ant colony optimization technique tuned controller for frequency regulation of single area nuclear power generating system. Microprocess. Microsyst. 2020, 73, 102953. [Google Scholar] [CrossRef]
- Mohanty, B.; Hota, P.K. A hybrid chemical reaction- particle swarm optimization technique for automatic generation control. J. Electr. Syst. Inf. Technol. 2018, 5, 229–244. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Fathy, A. Recent methodology based Harris Hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.; Banerjee, S. Load frequency control of interconnected power system using grey wolf optimization. Swarm Evol. Comput. 2016, 27, 97–115. [Google Scholar] [CrossRef]
- Madasu, S.D.; Kumar, M.L.S.S.; Singh, A.K. A flower pollination algorithm based automatic generation control of inter-connected power system. Ain Shams Eng. J. 2018, 9, 1215–1224. [Google Scholar] [CrossRef] [Green Version]
- Hakimuddin, N.; Khosla, A.; Garg, J.K. Centralized and decentralized AGC schemes in 2-area interconnected power system considering multi source power plants in each area. J. King Saud Univ. Eng. Sci. 2020, 32, 123–132. [Google Scholar] [CrossRef]
- Barisal, A.; Mishra, S. Improved PSO based automatic generation control of multi-source nonlinear power systems interconnected by AC/DC links. Cogent Eng. 2018, 5, 1422228. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Performance comparison of various energy storage devices in combined LFC and AVR of multi area system with renewable energy integration. Int. J. Renew. Energy Res. 2020, 10, 933–944. [Google Scholar]
- Kalyan, C.S.; Suresh, C.V. PIDD controller for AGC of nonlinear system with PEV integration and AC-DC links. In Proceedings of the 2021 International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Virtual, 21–23 January 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Tasnin, W.; Saika, L.C. Comparative performance of different energy storage devices in AGC of multi-source system in-cluding geothermal power plant. J. Renew. Sustain. Energy 2018, 10, 024101. [Google Scholar] [CrossRef]
- Zamani, A.; Barakati, S.M.; Yousofi-Darmian, S. Design of a fractional order PID controller using GBMO algorithm for load–frequency control with governor saturation consideration. ISA Trans. 2016, 64, 56–66. [Google Scholar] [CrossRef] [PubMed]
- Jain, S.; Hote, Y.V. Design of fractional PID for Load frequency control via Internal model control and Big bang Big crunch optimization. IFAC Pap. Line 2018, 51, 610–615. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. Design and analysis of BFOA- optimized fuzzy PI/PID controller for AGC of multi-area tradition-al/restructured electrical power systems. Soft Comput. 2017, 121, 6435–6452. [Google Scholar] [CrossRef]
- Rajesh, K.; Dash, S.; Rajagopal, R. Hybrid improved firefly-pattern search optimized fuzzy aided PID controller for automatic generation control of power systems with multi-type generations. Swarm Evol. Comput. 2019, 44, 200–211. [Google Scholar] [CrossRef]
- Nayak, J.R.; Shaw, B.; Sahu, B.K. Application of adaptive-SOS (ASOS) algorithm based interval type-2 fuzzy-PID controller with derivative filter for automatic generation control of an interconnected power system. Eng. Sci. Technol. Int. J. 2018, 21, 465–485. [Google Scholar] [CrossRef]
- Arya, Y. Improvement in automatic generation control of two-area electric power systems via a new fuzzy aided optimal PIDN-FOI controller. ISA Trans. 2018, 80, 475–490. [Google Scholar] [CrossRef] [PubMed]
- Gupta, A.; Chauhan, A.; Khanna, R.; Gupta, A.; Chauhan, A.; Khanna, R. Design of AVR and ALFC for single area power system including damping control. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, 6–8 March 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rouzbehi, K.; Sadeh, S. A New Combined Model for Simulation of Mutual Effects between LFC and AVR Loops. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Chandrakala, K.V.; Balamurugan, S. Simulated annealing based optimal frequency and terminal voltage control of multi source multi area system. Int. J. Electr. Power Energy Syst. 2016, 78, 823–829. [Google Scholar] [CrossRef]
- Rajabongshi, R.; Saikia, L.C. Conbined control of voltage and frequency of multi-area multisource system incorporating solar thermal power plant using LSA optimized classical controllers. IET Gener. Transm. Distrib. 2017, 11, 2489–2498. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K. Combined load frequency and terminal voltage control of power systems using moth flame optimization algorithm. J. Electr. Syst. Inf. Technol. 2019, 6, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Kalyan, C.H.N.S.; Rao, G.S. Impact of communication time delays on combined LFC and AVR of a multi-area hybrid system with IPFC-RFBs coordinated control strategy. Prot. Control. Mod. Power Syst. 2021, 6, 1–20. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Coordinated SMES and TCSC Damping Controller for Load Frequency Control of Multi Area Power System with Diverse Sources. Int. J. Electr. Eng. Inform. 2020, 12, 747–769. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Frequency and voltage stabilisation in combined load frequency control and automatic voltage regulation of multiarea system with hybrid generation utilities by AC/DC links. Int. J. Sustain. Energy 2020, 39, 1009–1029. [Google Scholar] [CrossRef]
- Rajbongshi, R.; Saikia, L.C. Coordinated performance of interline power flow controller and superconducting magnetic energy storage in combined ALFC and AVR system under deregulated environment. J. Renew. Sustain. Energy 2018, 10, 044102. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Venkateswarlu, A.N.; Reddy, C.R.; Goud, B.S.; Prasad, A.G.; Sriram, C.; Aymen, F. Frequency reg-ulation of multi area renewable energy source system with practical constraints under fractional-order fuzzy controller. Int. J. Renew. Energy Res. 2021, 11, 992–1002. [Google Scholar]
- Kalyan, C.N.S.; Rao, G.S. Performance Index-Based Coordinated Control Strategy for Simultaneous Frequency and Voltage Stabilization of Multi-area Interconnected System. In Control Applications in Modern Power System; Singh, A.K., Tripathy, M., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2021; pp. 45–55. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Coordinated control strategy for simultaneous frequency and voltage stabilisation of the multi-area interconnected system considering communication time delays. Int. J. Ambient. Energy 2021, 1–13. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Suresh, C.V. Differential Evolution based Intelligent Control Approach for LFC of Multiarea Power System with Communication Time Delays. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 19–20 February 2021; pp. 868–873. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Ramadan, H.S.; Bajaj, M.; Ali, Z.M. Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays. Energies 2021, 14, 5387. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Stabilizing Frequency and Voltage in Combined LFC and AVR System with Coordinated Performance of SMES and TCSC. In Control Applications in Modern Power System; Singh, A.K., Tripathy, M., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2021; pp. 65–76. [Google Scholar] [CrossRef]
- Kalyan, C.N.S. UPFC and SMES based Coordinated Control Strategy for Simultaneous Frequency and Voltage Stability of an Interconnected Power System. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Shankar, R.; Bhushan, R.; Chatterjee, K. Small-signal stability analysis for two-area interconnected power system with load frequency controller in coordination with FACTS and energy storage device. Ain Shams Eng. J. 2016, 7, 603–612. [Google Scholar] [CrossRef] [Green Version]
- Anita; Yadav, A. AEFA: Artificial electric field algorithm for global optimization. Swarm Evol. Comput. 2019, 48, 93–108. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ACE | ∆ACE | ||||
|---|---|---|---|---|---|
| BN | SN | Z | SP | BP | |
| BN | BN | BN | BN | SN | Z |
| SN | BN | BN | SN | Z | SP |
| Z | BN | SN | Z | SP | BP |
| SP | SN | Z | SP | BP | BP |
| BP | BP | Z | SP | BP | BP |
| Parent1 | 0 1 0 0 0 1 0 1 |
| Parent2 | 0 0 1 1 0 1 0 0 |
| Mask | 1 0 0 1 0 1 1 0 |
| Child1 | 0 1 0 1 0 1 0 1 |
| Child2 | 0 0 1 0 0 1 0 0 |
| HAEFA-Based Controllers | Settling Time TS (Sec) | ITAE | ||||
|---|---|---|---|---|---|---|
| ∆f1 | ∆f2 | ∆Ptie12 | V1 | V2 | ||
| PI | 26.88 | 26.62 | 27.94 | 8.124 | 8.791 | 36.134 |
| PID | 23.45 | 24.11 | 22.93 | 6.524 | 7.811 | 28.376 |
| Fuzzy PID | 15.23 | 11.03 | 17.34 | 5.127 | 4.157 | 16.552 |
| HAEFA Tuned Controller | Area-1 | Area-2 | ||
|---|---|---|---|---|
| LFC Loop | AVR Loop | LFC Loop | AVR Loop | |
| PI | KP = 3.1324 KI = 2.1487 | KP = 2.0119 KI = 1.1576 | KP = 2.9034 KI = 1.8270 | KP = 1.9085 KI = 1.0864 |
| PID | KP = 3.3517 KI = 2.4854 KD = 0.9649 | KP = 2.2510 KI = 1.3472 KD = 0.4976 | KP = 2.8909 KI = 2.1869 KD = 0.9595 | KP = 2.3413 KI = 1.3718 KD = 0.8693 |
| Fuzzy PID | KP = 3.7679 KI = 1.9755 KD = 1.2769 | KP = 2.0457 KI = 1.0844 KD = 0.9961 | KP = 3.4509 KI = 1.9924 KD = 0.9133 | KP = 2.3015 KI = 1.1554 KD = 0.9419 |
| HAEFA: Fuzzy PID | |||||
|---|---|---|---|---|---|
| ∆f1 | ∆f2 | ∆Ptie12 | V1 | V2 | |
| Without ESD | 15.23 | 11.03 | 17.34 | 5.127 | 4.157 |
| With UCs | 14.55 | 9.92 | 16.90 | 4.125 | 3.821 |
| With SMES | 12.89 | 9.81 | 16.25 | 3.240 | 2.801 |
| With RFBs | 11.61 | 8.28 | 15.59 | 2.214 | 2.026 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Bajaj, M.; Sharma, N.K.; Alhelou, H.H.; Siano, P.; Kamel, S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies 2022, 15, 629. https://doi.org/10.3390/en15020629
Kalyan CNS, Goud BS, Reddy CR, Bajaj M, Sharma NK, Alhelou HH, Siano P, Kamel S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies. 2022; 15(2):629. https://doi.org/10.3390/en15020629
Chicago/Turabian StyleKalyan, CH. Naga Sai, B. Srikanth Goud, Ch. Rami Reddy, Mohit Bajaj, Naveen Kumar Sharma, Hassan Haes Alhelou, Pierluigi Siano, and Salah Kamel. 2022. "Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System" Energies 15, no. 2: 629. https://doi.org/10.3390/en15020629