1. Introduction
Approximately 1 billion people worldwide currently live without access to electricity, and it is estimated that by 2030 about 780 million will remain in this condition. In recent years, this situation has improved mainly due to the development of technologies that have allowed access and participation in new forms of energy generation in the world electrical matrix. The old paradigm of access to energy through the expansion of the existing electrical system—centralized generation—has been overcome. Considering the recent increase of the energy demand, a new form of energy generation known as distributed generation (DG) is strongly recommended. DG allows the consumers to generate their own energy, with the possibility of injecting the surplus generated into the concessionaire’s network [
1].
The growing presence of this type of generation in power systems requires a high level of protection to be able to detect and isolate failures that may occur in the different operation modes of the DG, in the least possible time while maintaining selectivity. This growth means that traditional systems, with centralized generation, tend to transform from radial unidirectional power flow networks into active networks in which the power flow can run in multiple directions, causing the short currents to change in value and direction [
2]. Thus, to avoid loss of selectivity, the settings of the protection devices must be frequently checked as the installation of new DG units increases [
3]. In addition to the loss of selectivity, the performance of the overcurrent relay, the coordination between fuse and recloser, and the operation in island mode, caused by the presence of the DG, can impact the distribution networks protection systems [
4,
5]. Alternative proposals are suggested to try to mitigate these impacts collaborating with the efficiency of protection systems: change of protection devices or adjustments; disconnection of the generation distributed during the faults; creating balance between the different technologies of DG; use of adaptive protection; use of intelligent transformers; using the fault current limiter (FCL) [
5].
Among the alternatives listed, the use of an FCL is shown as one of the most efficient options in reducing the effects caused by the presence of the DG in the protection of distribution systems. Basically, it is a device formed by an impedance inserted in series with the circuit that is intended to limit the current and its value varies according to the current that circulates through the circuit. In normal conditions, the impedance value is approximately zero. If a fault is detected, it increases sharply in order to limit the short-circuit current. Once the fault is over, the impedance value returns to the normal condition [
6].
The FCL eliminates the selectivity problem caused by the connection of new DG units without the need to readjust or replace the protection elements already installed. Moreover, the use of FCL results in an increase in the reliability and safety of the system, improvement in the transient stability, mitigation of voltage sags at the common coupling point, improvement of the system’s capacity, and increase in the integration of DG in the distribution [
7,
8,
9].
Regarding the desirable electrical characteristics of an FCL, the following stand out: low impedance under nominal system operating conditions; limitation of the first peak of the transient fault current; limitation of the stationary fault current; no action under sufficiently small fault currents; capacity for many maintenance-free operations; high reliability and long service life; no overvoltages arising from current limitation; fast and automatic return to the low-impedance state after the fault interruption; and low energy dissipation during the limiting action [
9,
10].
Among the main technologies currently used in the manufacture of FCL, specialized literature highlights the high-temperature superconducting fault current limiters, resonant fault current limiters, and solid-state fault limiters [
10,
11]. Depending on the type of technology used, the fault current will behave differently. The analysis of the limiter performance with a superconductor must consider thermal models and the type of material used as well. Regarding the resonant limiter, it has a high limiting action since the first cycles in which the fault occurs gradually limit the current until reaching the maximum value defined in the project. The solid-state current limiter (SSFCL) has a constant limiting action from the second cycle on which the fault is detected, but before detection, the current value is greater than the maximum specified current [
7,
12].
The SSFCL is a device that uses the switching of high-power semiconductors to interrupt the fault current before it reaches its maximum value. It maintains the network protection system coordination and can be installed in microgrids or in feeders with renewable sources. Faster semiconductor devices with a higher blocking voltage are required for this [
8,
13].
According to the scientific literature [
14], Ueda was the pioneer in the development of the first SSFCL to be used in a distribution system. The arrangement consisted of gate turn-off thyristors (GTOs), current-limiting impedance, voltage limiting, and a fault current detector element. Each unit of the prototype tested had as voltage and current characteristics, respectively, 2 kV
RMS and 400 A
RMS. To be tested in a 6.6 kV distribution substation, it was necessary to associate units in series. The time between fault detection and its interruption was 40 µs.
Traditional protection devices use the fundamental phasors of the current and voltage signals to monitor the behavior of electrical systems. This procedure suffers a delay caused by data windowing, a characteristic of the algorithms used in phasor extraction [
15]. As a result, research has been initiated to develop fast protection devices based on processing instantaneous quantities and to avoid phasor estimation procedures. Great scientific and industrial contributions, directed toward the development of time domain protection devices, took place in the 1980s. Hardware limitations, speed of response of algorithms, and the control of processed quantities in the time domain have been obstacles that have slowed the development of the area of fast protections. Significant contributions in this area have resumed since the 2000s [
16].
Thus, research has been developed with the aim of improving a technology in the time domain that uses the instantaneous value of current and/or voltage, with no need for phasor calculation. As a result, the activation time of the protection devices is between 1 and 4 ms, which is difficult to achieve with phasor-based relays.
A method that is based on the analytical model of distribution systems and that uses effective values of current and voltage fundamental components referring to transients obtained at substations was proposed by [
17]. Tests were performed using MATLAB/Simulink software to simulate the missing system, and it showed high accuracy.
A protection function based on the analysis of incremental quantities is presented in [
18]. Using current and voltage signals obtained in the pre-fault condition and incremental current and voltage quantities, operating and restraining voltages in the protection range are estimated. By comparing these values, it is possible to determine whether the fault is internal or external to the considered protection zone. In an attempt to reduce the effects that the high-frequency components have on the algorithm, average values of operating magnitude are counted and considered for the relay actuation. Hence, average actuation times close to 12 ms are observed.
In order to promote faster actuation times and make the algorithm safer and more robust, [
19] proposed a protection function that uses Clarke transform together with a frequency response compensation filter of the capacitive potential transformers.
Some functions intended for transmission line protection in the time domain, based on the use of incremental quantities and traveling wave theory, are proposed by [
20]. Among these functions, the following stand out: directional power functions based on traveling waves and incremental quantities, distance function founded on the analysis of incremental quantities, and a function based on traveling wave theory.
The first transmission line protection device to employ only time-domain functions, based on incremental quantities and traveling wave theories, was presented by [
21]. They displayed the main constructive details of the hardware and showed its operation in real fault situations and through simulations. Performance analysis is done by comparison with traditional phase-based protection devices. In all the tests performed, the device in the time domain was faster than traditional devices, showing an operation time of less than or equal to 20 ms.
Due to the emergence of new ultra-high-speed protection devices based on incremental quantities and traveling waves, configuration adjustments are required. Most often, these adjustments are related to the levels of incremental quantities and propagation times of the traveling waves. Then, for the setup to be done properly, it is necessary to know how to calculate incremental currents and voltages and how to estimate and measure the propagation times of the traveling waves [
22].
A communications-based protection scheme that uses incremental-quantity directional elements and traveling waves to make decisions to shut down a transmission line, where voltage transformers with a coupling capacitor provide voltage signals to these elements is presented in [
23]. Incremental-quantity directional elements operated in the range of 1055 to 8750 ms, with an average operating time of 2966 ms. The traveling-wave-based directional elements operated in the range of 105 µs and the slowest one was at 138 µs, with an average operating time of 116 µs. The details of the commissioning of two ultra-high-speed protection relays in the time domain from the pilot project developed in India are presented in [
24]. They are installed on a hybrid line, 220 kV, 89 km long, and use incremental quantities of voltage and current, which are the differences between an instantaneous current sample and a sample from a previous cycle. Incremental quantities contain purely fault voltage and current, excluding any charge information. These signals are filtered in a low-pass filter, and then applied to directional and distance elements.
The high participation of DG in power systems, especially in distribution, has detrimental effects on the quality of power, causing losses for consumers and utilities.
In [
25] a modified multi-class support vector machines (MMC-SVMs) technique is proposed to detect and identify faults, using the real-time RMS voltage values of each bar of the distribution system. These values are grouped into two dataset matrices: matrix showing no fault conditions; matrix associated with the fault conditions.
A method to detect and classify faults in distribution networks with the presence of DG is presented in [
26]. Its main idea is to consider the operation modes of distributed generators in the analysis of fault characteristics using the Fortescue approach. In addition, SoftMax regression is employed to minimize the negative effects of transients on fault classification.
The authors of [
27] present a fault detection method that uses a summarized matrix of the characteristics of the power system, RMS voltage information provided by the Hilbert transform, harmonic information obtained by the discrete Fourier transform, and a detection method based on the Hilbert–Huang transform. A typical 10.5 kV radial distribution network with three feeders is used to demonstrate, through simulations, the performance of the proposed fault detection method compared to several classical methods.
To limit the short-circuit current in a 500 kV AC main, an FCL based on a high-coupled split reactor (HCSR), namely, HCSR-FCL is proposed in [
28]. The device is controlled in real time through a detection algorithm based on the squared ratio of the three-phase current, with two data windows as detection criteria. The simulation results showed that the fault detection time was below 1 ms.
In reference [
29], a harmonic mitigation method to improve power quality in distribution systems is presented. It basically consists of the use of single-tuned harmonic filters (STFs), to minimize total harmonic distortion (THD) and power loss and improve the voltage profile considering different restrictions to meet the IEEE 519 standard. The Water Cycle algorithm (WCA) is used to determine the quantity, characteristics, and the installation location of STFs.
A method for fault detection in distribution systems with the presence of non-linear loads is presented in [
30]. The phase angle of the third harmonic is obtained using the Stockwell transform and then compared to a self-adaptive threshold. An index based on the cumulative error generated by this comparison is employed to monitor the status of each phase.
Considering that the fault detection systems, especially the algorithms, used by the manufacturers of protection devices, are not open, that is, in the public domain, the development of the protection area is hindered. Thus, the focus of this study is to propose and analyze a system that works with instantaneous values of the current and its derivative to act quickly in detecting fault current in medium-voltage distribution systems.
The main contributions of this paper can be summarized as follows:
- −
simplicity of the methodology;
- −
monitoring in the time domain of the behavior of the instantaneous value of the current and its derivative, allowing an increase in the detection speed;
- −
demonstration that the simultaneous monitoring of the current in three different references frames working together makes faster fault detection possible in many situations. The complementary action of the references in the detection of the fault causes the activation of the protection device to be made by a control signal issued by the reference that detects the fault first.
The structure of the paper is as follows:
Section 2 presents the signal-processing-based fault detection techniques used in power systems;
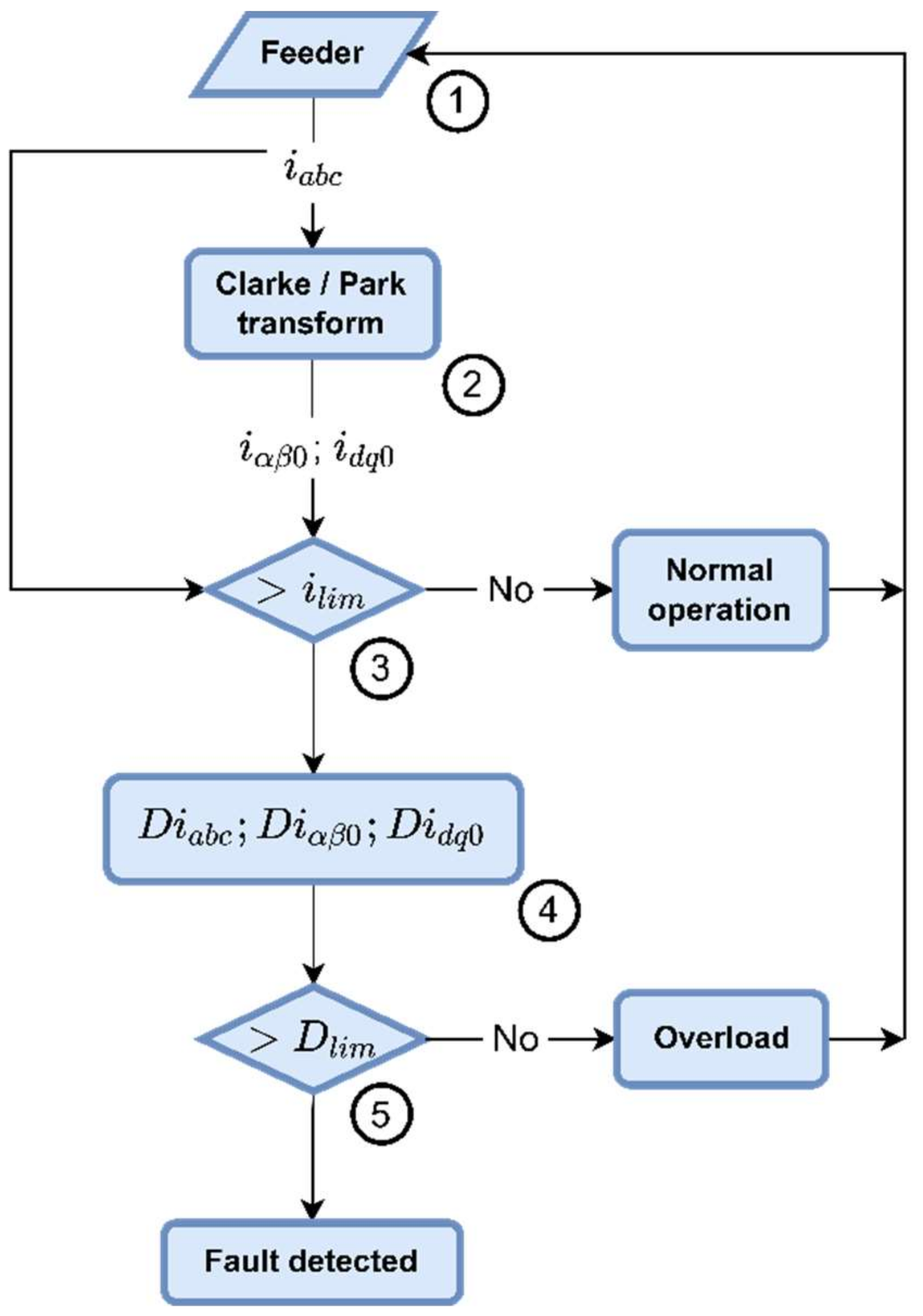
Section 3 presents the proposed fault current detection algorithm in the time domain;
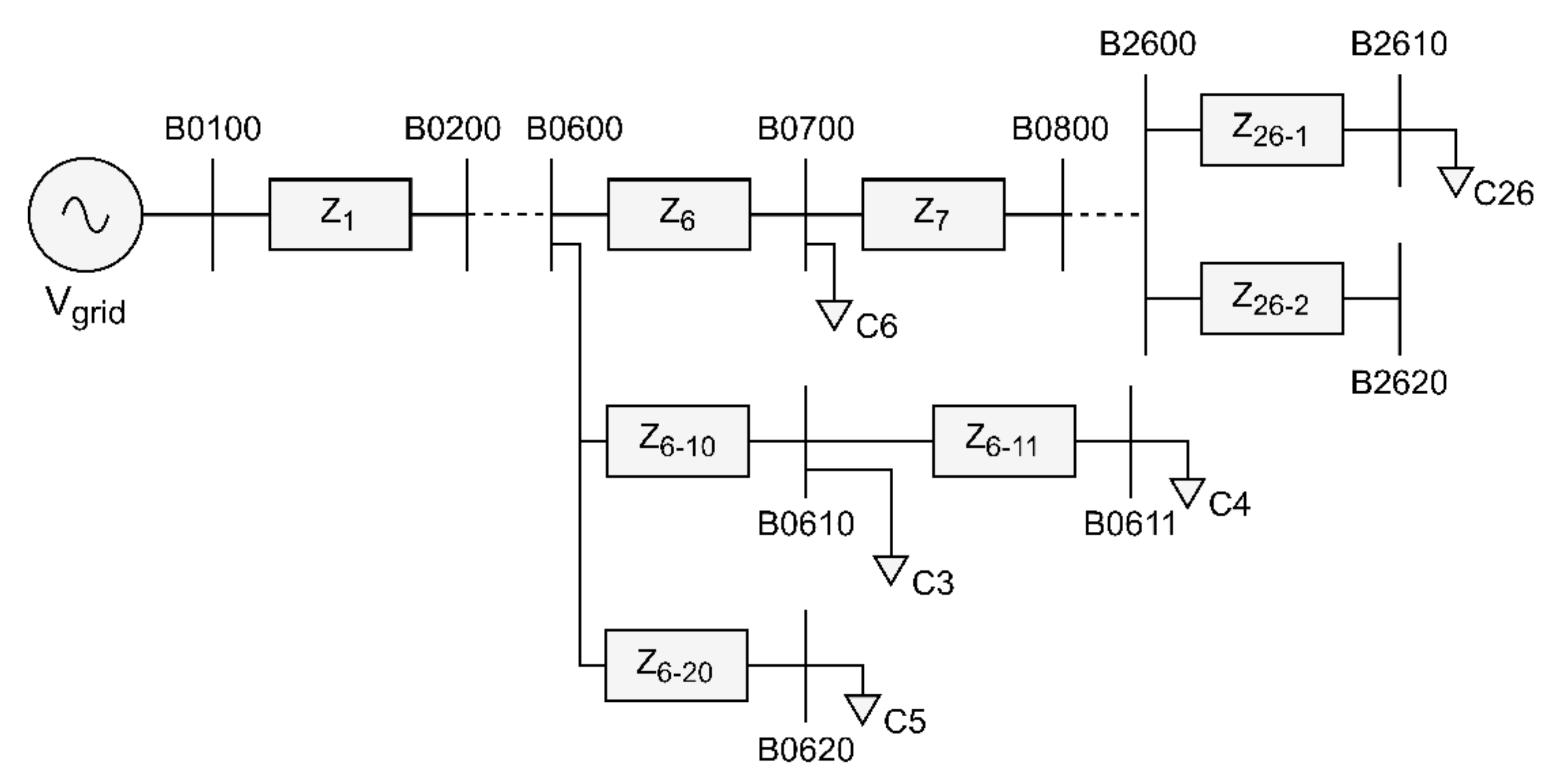
Section 4 presents a case study on a feeder belonging to a medium-voltage distribution system of a real network in the state of Espírito Santo, Brazil;
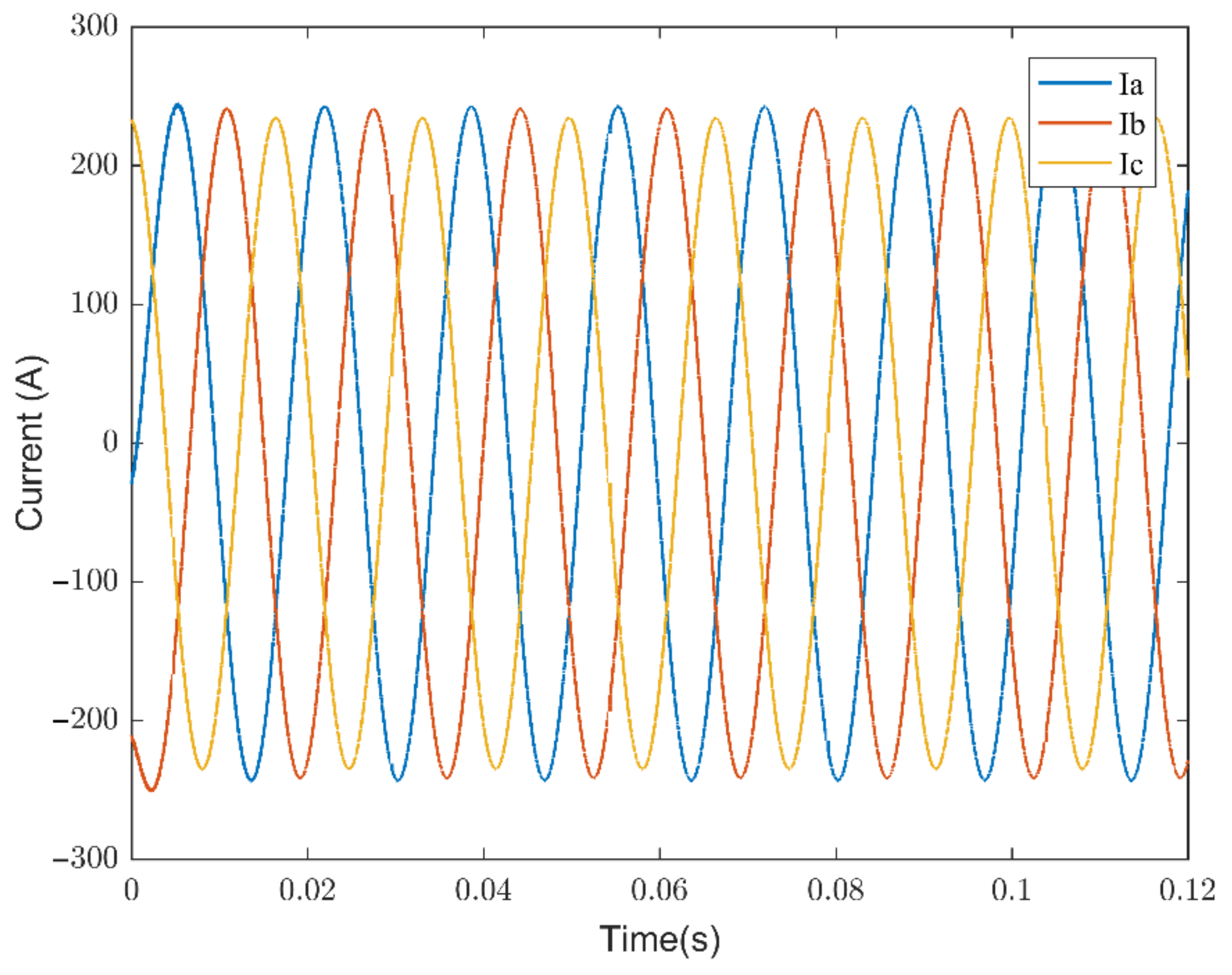
Section 5 presents the simulation results obtained in
abc,
αβ0, and
dq0 references, for different fault conditions and processing sampling rates;
Section 6 presents a discussion; finally,
Section 7 presents the conclusions.
6. Discussion
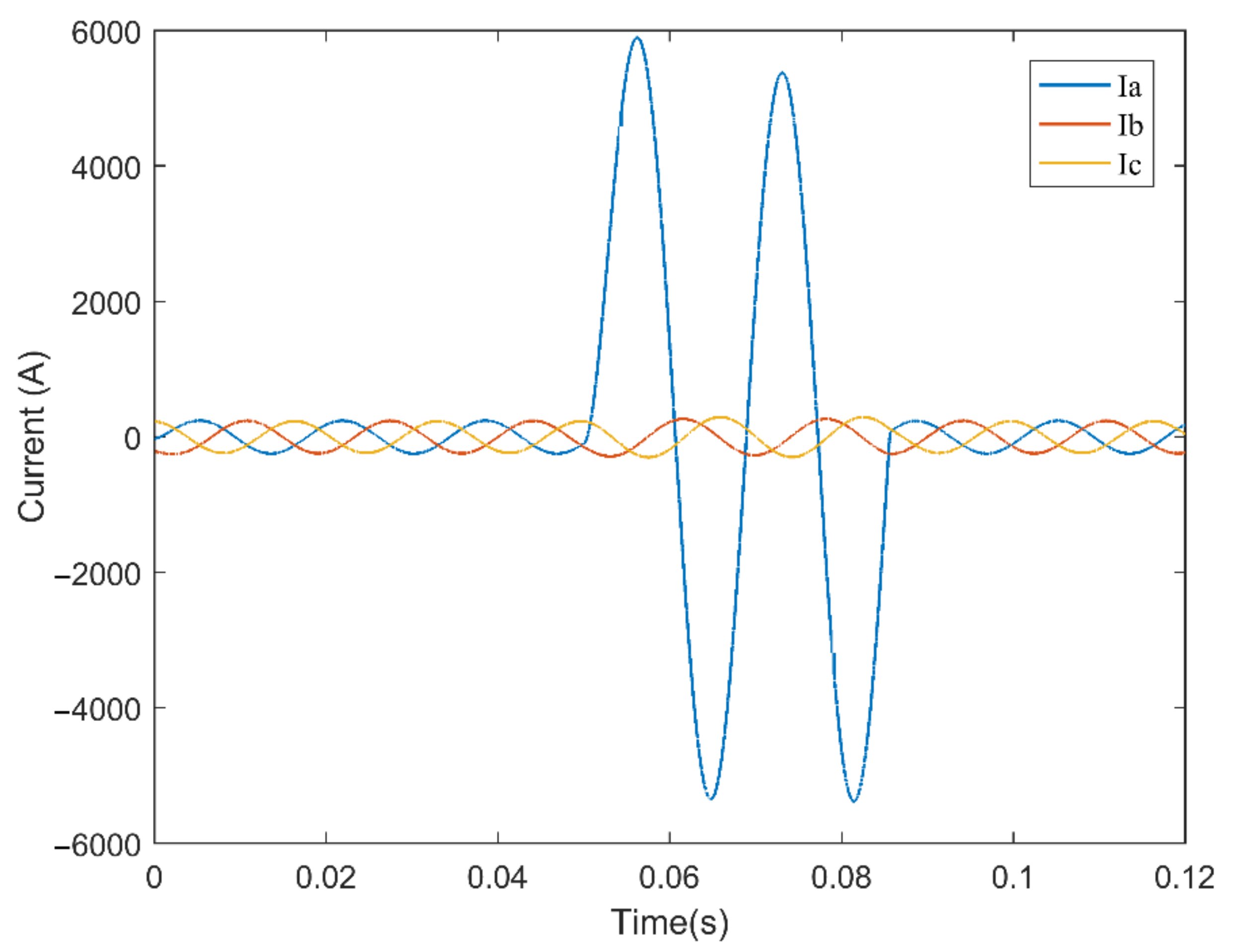
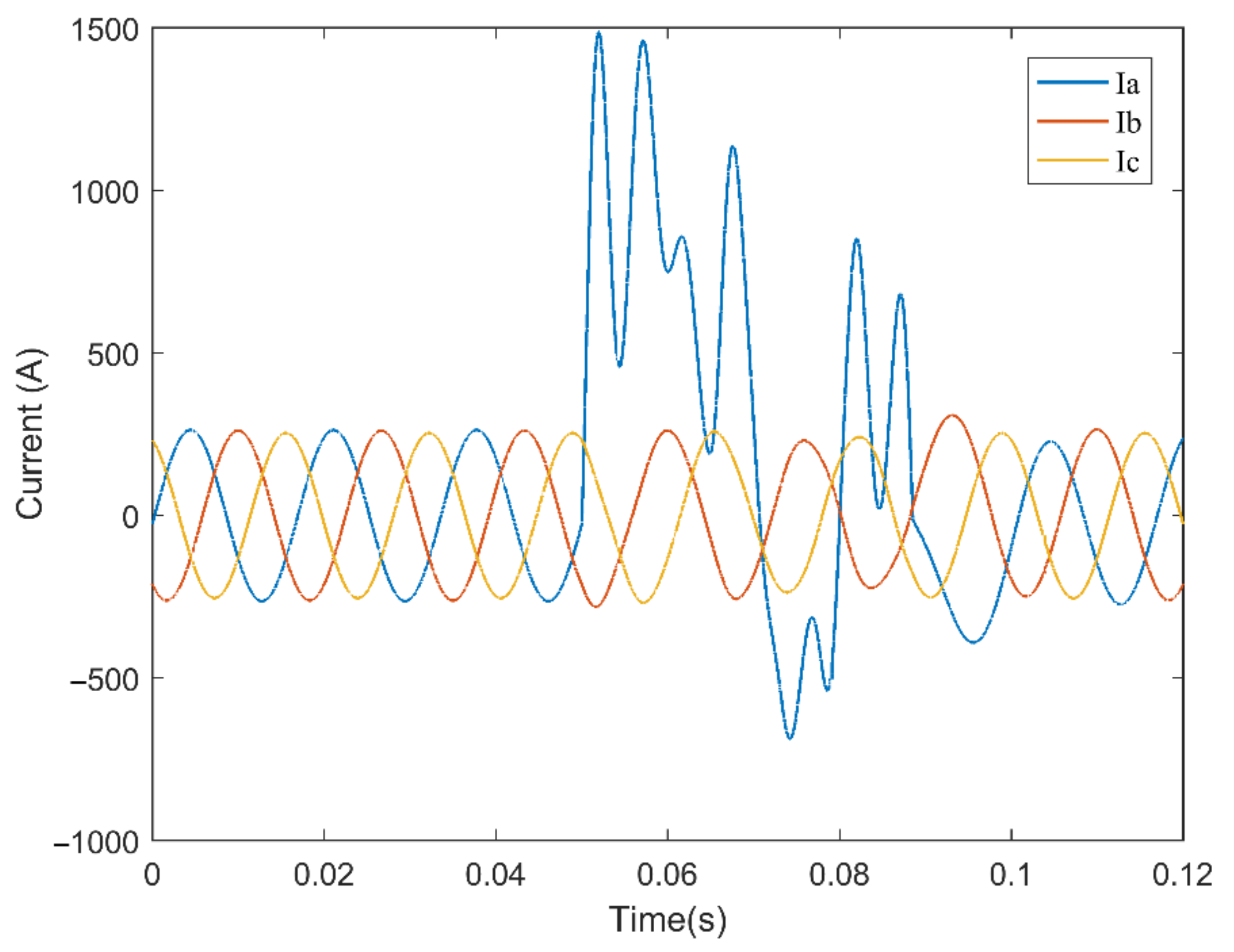
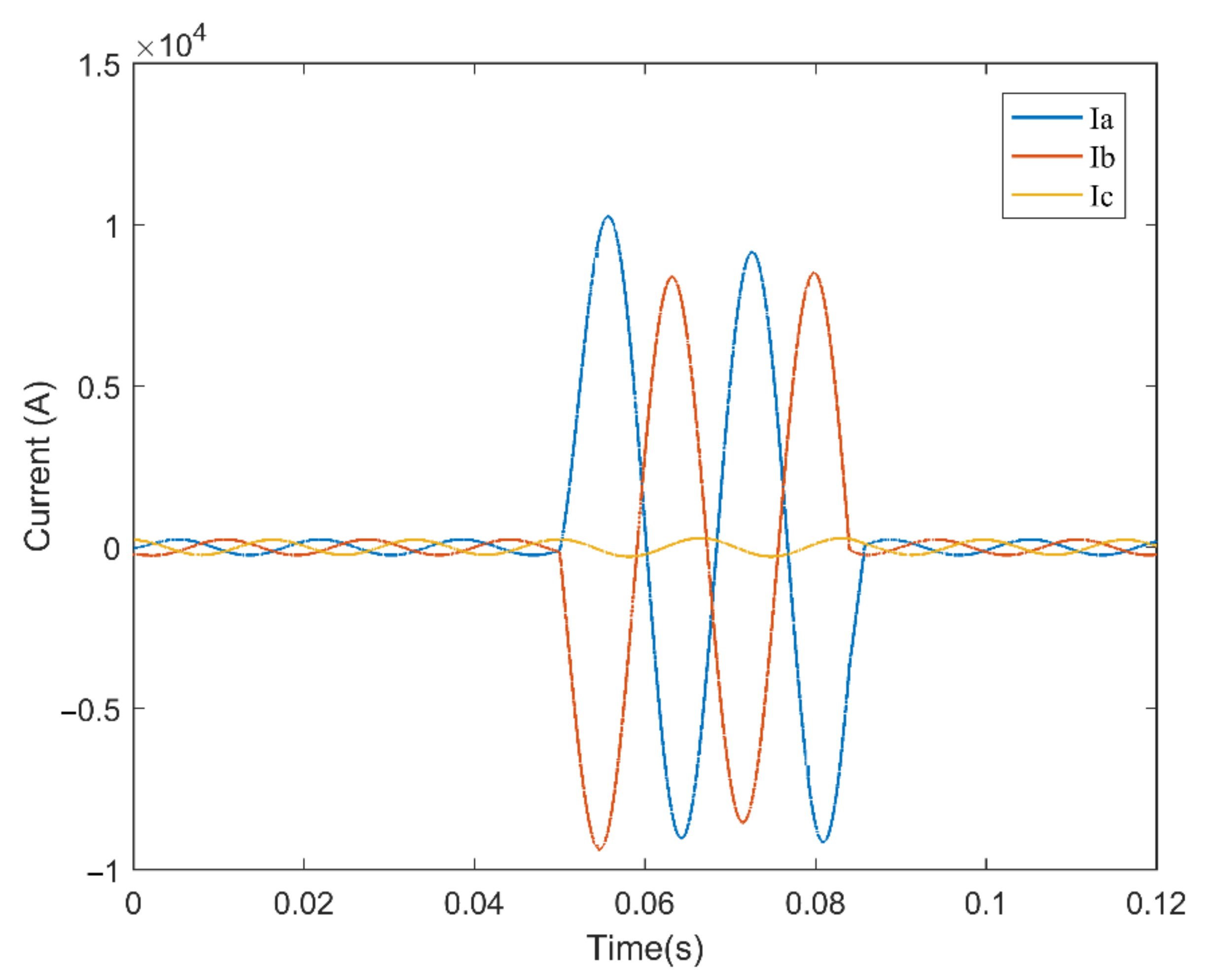
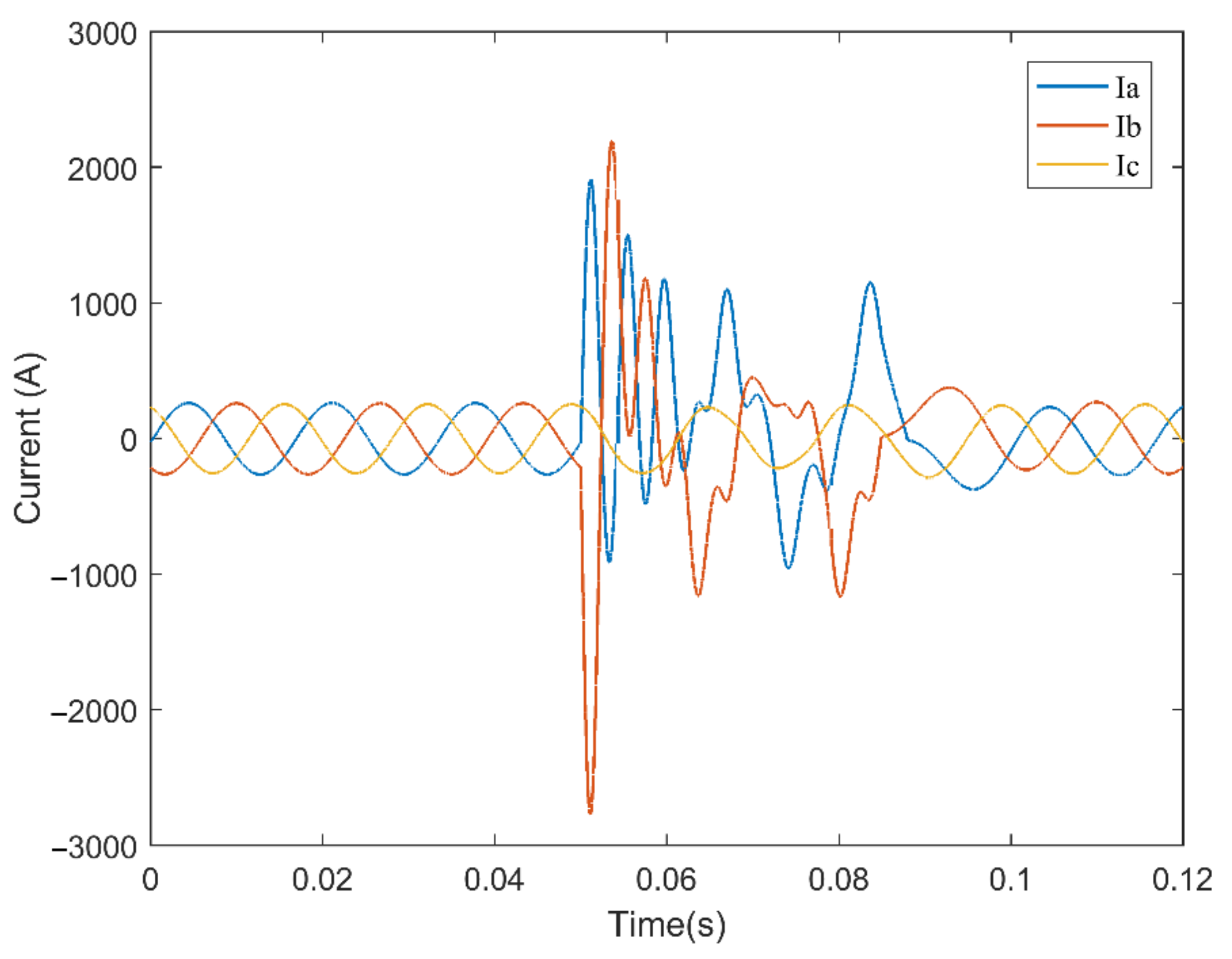
The presented results show that the fault detection technique based on monitoring the instantaneous current value and its first derivative can detect different fault situations in a distribution system. The fault detection speed was found to depend on the PSR used and the type of fault present in the electrical system. The SLG fault was detected more quickly in the abc reference, with PSR = 50 µs and an average detection time of 63 µs. For the 2LG fault, detection was fastest in the dq0 reference, with PSR = 10 µs and an average detection time of 40 µs. When the fault was 2L, detection occurred faster in the abc and dq0 references, with PSR = 50 µs and an average detection time of 50 µs. Finally, detection of the 3LG fault was faster in the dq0 reference, with PSR = 10 µs and an average detection time of 45 µs. Considering all fault situations analyzed and independent of the PSR used, the total average detection time was 49 µs.
Instantaneous information makes protection devices with time-domain sensing technology faster than phase-based devices. This means that the protection relays present in systems operating at 60 Hz typically act between 17 and 25 ms, and faults are cleared between 50 and 67 ms.
The results of this study indicate that the fault detection technique based on monitoring the instantaneous value of the current and its first derivative is an alternative that can contribute to the improvement of protection devices in the time domain, especially in increasing the speed of action of these devices.
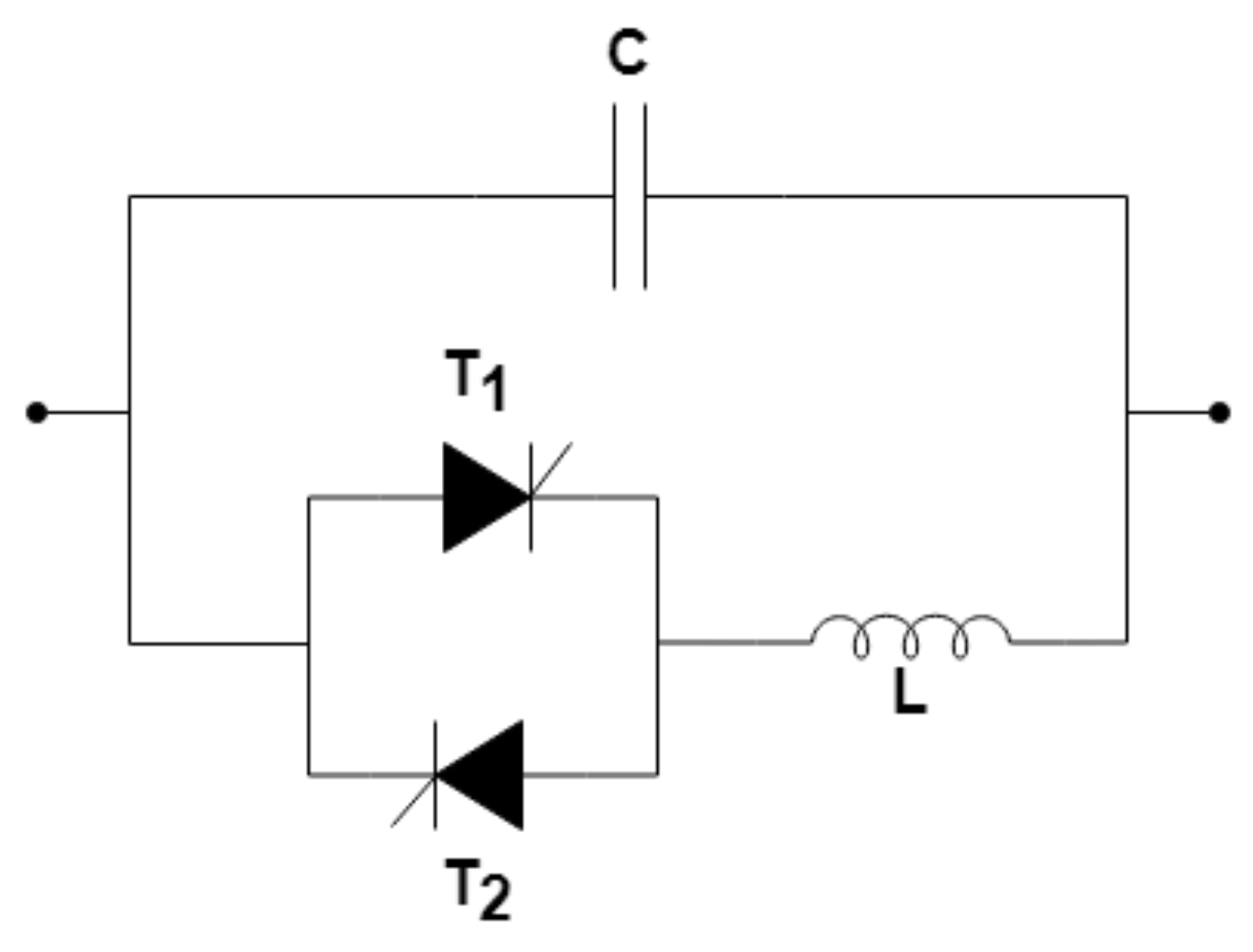
Regarding the limitation of fault currents, the detection technique associated with TCSC presented the expected behavior, causing the device to act as a variable impedance, limiting the fault current of the distribution system studied. Due to the potential growth in the number of DG units connected to traditional distribution systems, these systems tend to transform from radial unidirectional power flow networks to active networks in which the power flow can run in multiple directions and then, change the value of the short-circuit current. Considering that a TCSC is formed by controlled semiconductor switches and passive elements, its actuation time will basically depend on the fault detection time and the switching time of the switches, which is in the range from 5 to 400 µs.
According to the specialized literature, for systems operating at 60 Hz, actuation time of a recloser is typically less than 50 ms. Therefore, TCSC can be one of the alternatives to reduce the lack of coordination between the fuse and the recloser when temporary faults occur in distribution systems with DG.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











