




A New Strategy for PI Tuning in Photovoltaic Irrigation Systems Based on Simulation of System Voltage Fluctuations Due to Passing Clouds


Abstract
:1. Introduction
2. Materials and Methods
- Data collection of the PVIS system operation under different passing clouds.
- Data analysis to identify clouds.
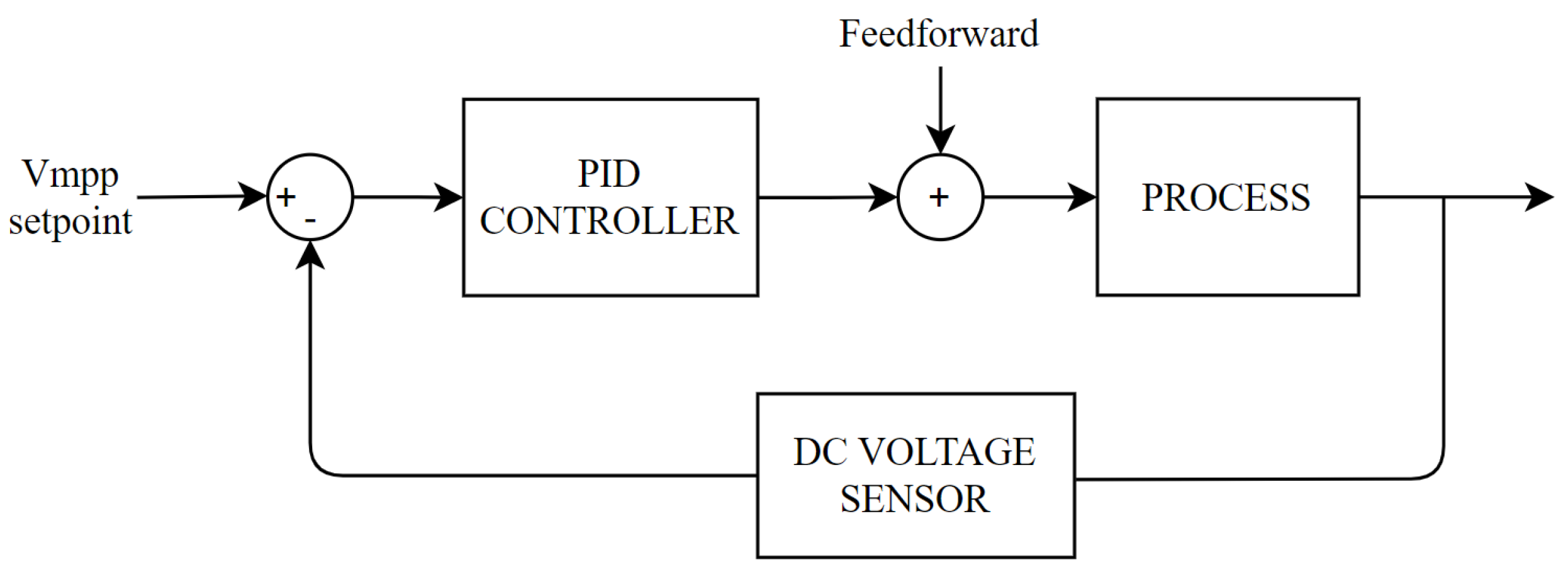
- Method for simulation using the feedforward input.
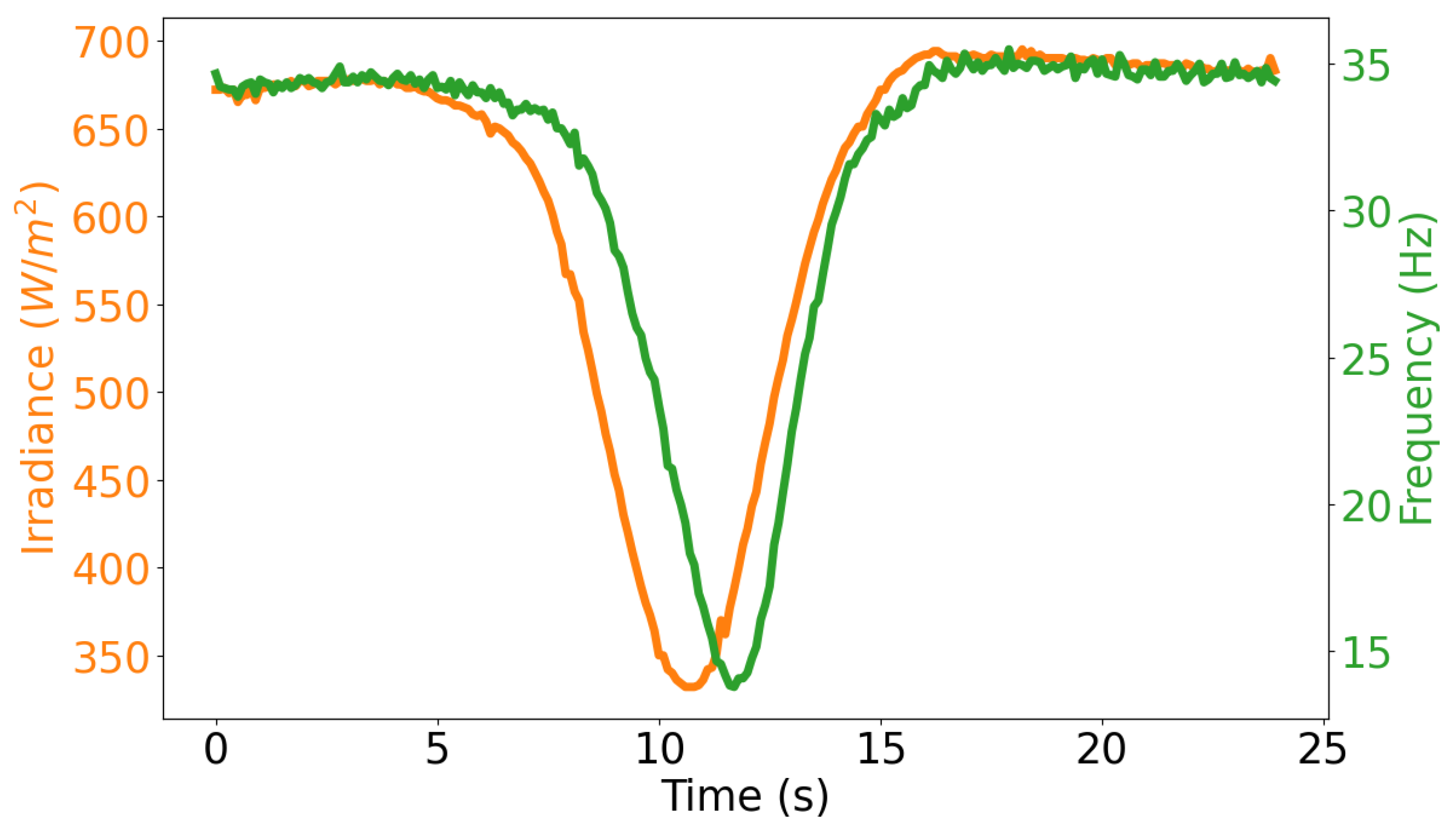
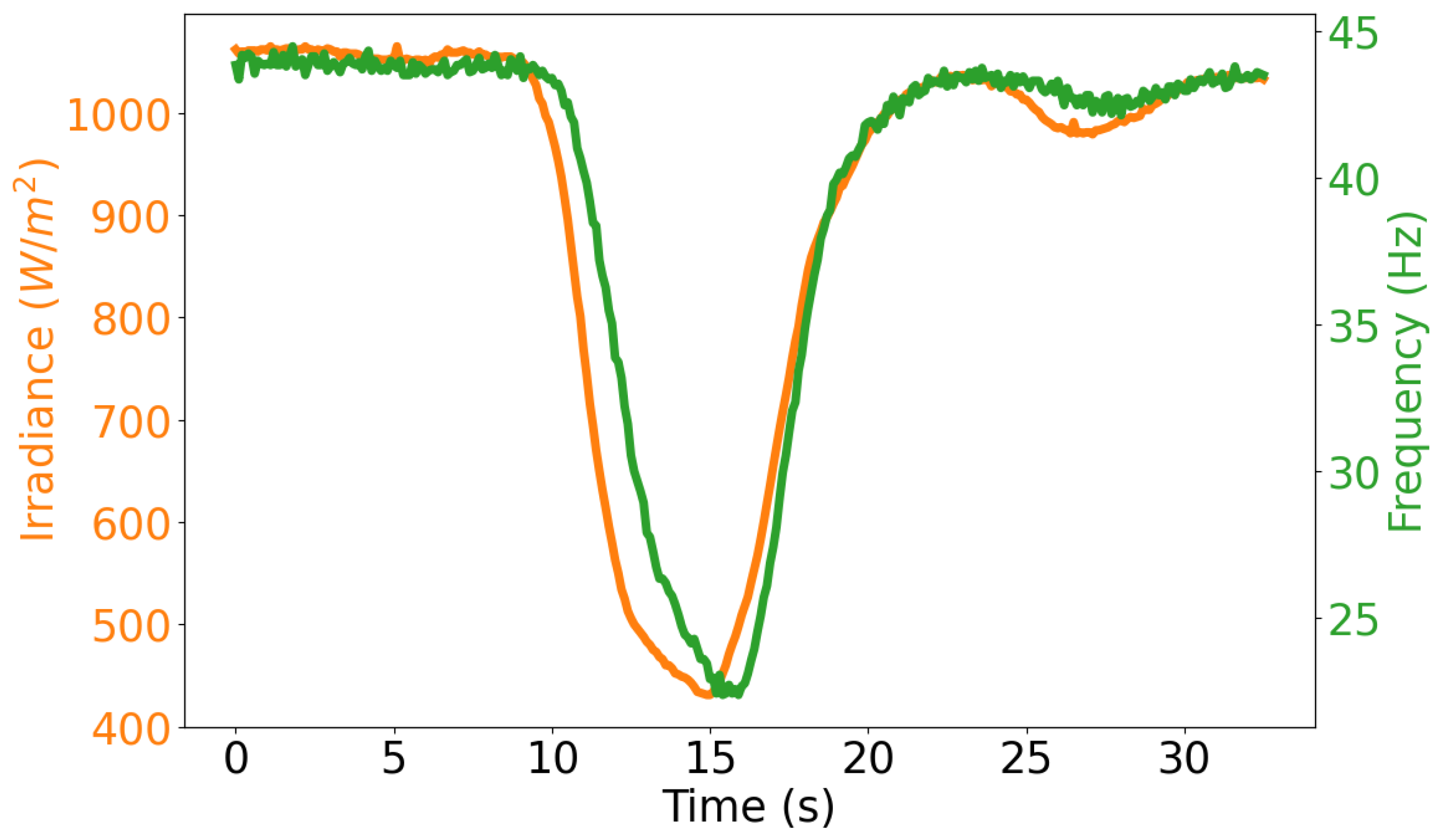
- The definition of the most suitable feedforward signal for the PID tuning based on the relationship between the system voltage, the derivative of irradiance and the output frequency.
- Development of the tuning process for both, stable operation and start-up of the PVIS. This section has been structured accordingly.
2.1. Laboratory Experimentation System
- PV array. ; V.
- Variable frequency drive (VFD). Three-phase 200 V; 0.75 kW.
- A monitoring and control system using:
- -
- Arduino based PLC (IndustrialShields).
- -
- MQTT for communication protocol.
- -
- Voltage, current, irradiance and temperature sensor. Frequency can be obtained from VFD.
- Oscilloscope and signal generator.
2.2. Methodology to Simulate System Voltage Drops Caused by Passing Clouds
- -
- Step 1: Data collection
- -
- Step 2: Data analysis to identify clouds
- Cloud recognition starts when the value of the calculated derivative is below the set threshold.
- Each of the derivative samples is analysed until its value is close to 0. If irradiance is stable, the cloud has finished.
- Advanced cloud filtering is available. For example, it can be configured to only display clouds that cause an irradiance decrease of a given value or given duration.
- -
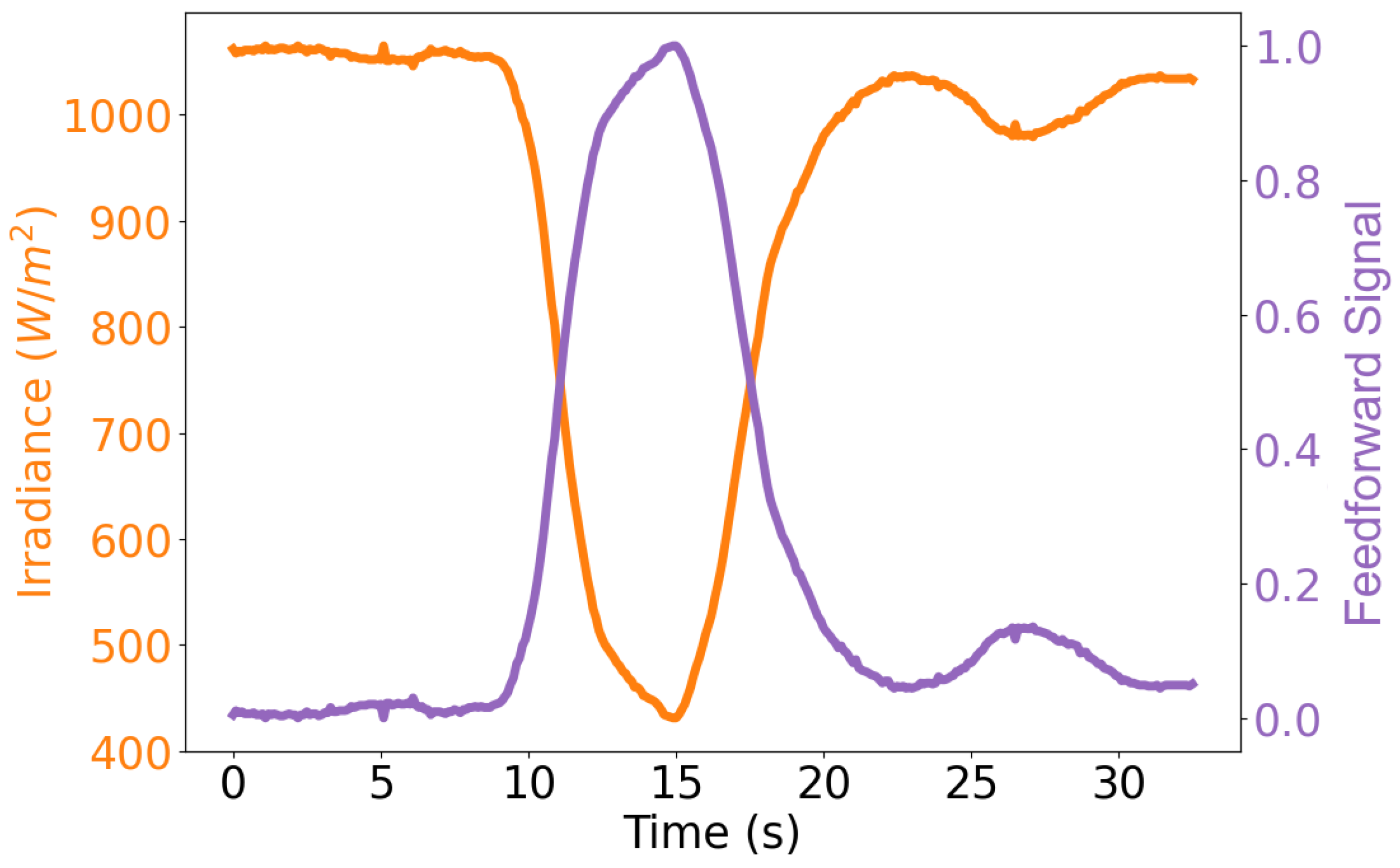
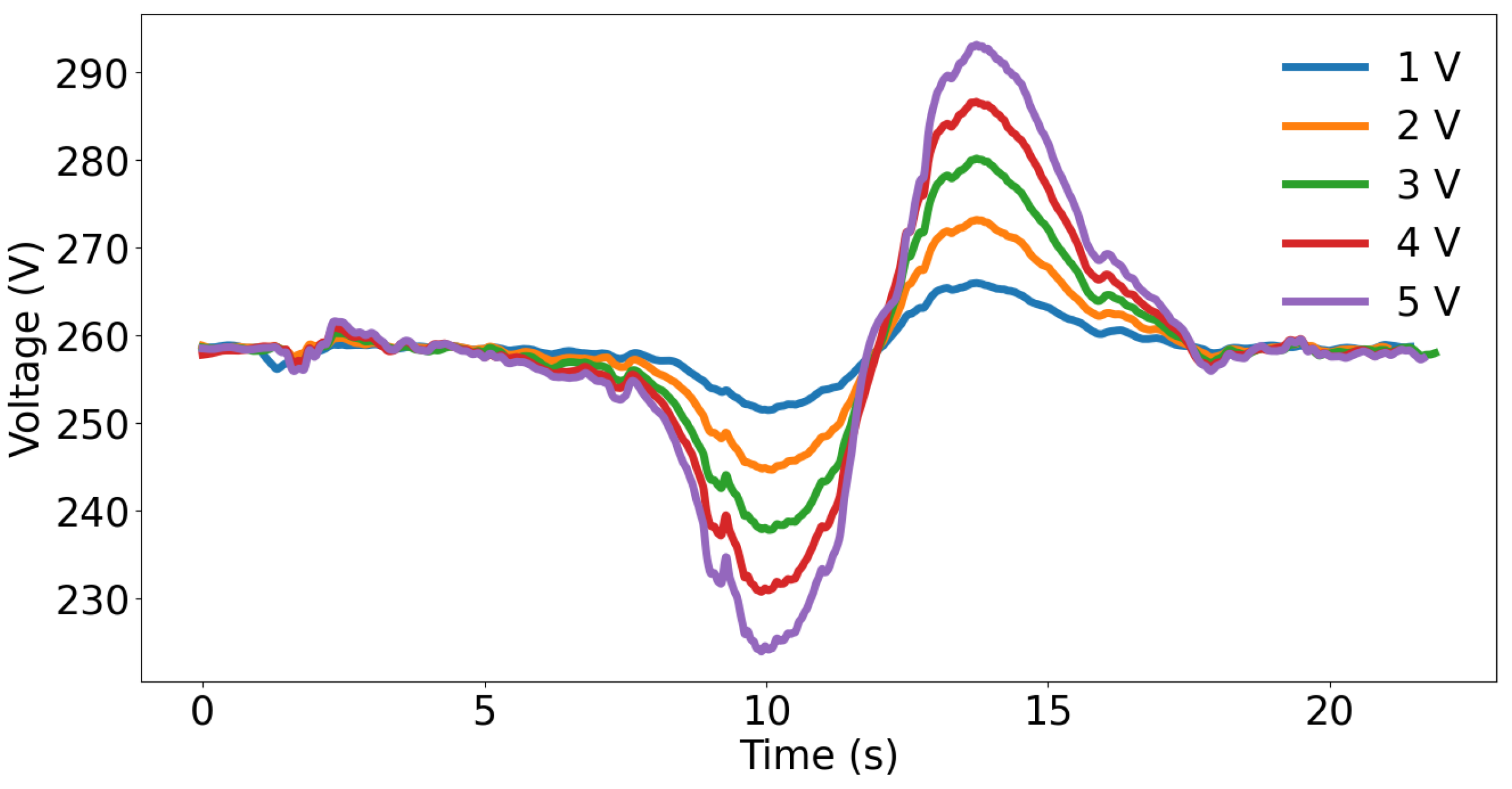
- Step 3: Simulation of system voltage drop caused by clouds using the VFD feedforward input
- Get maximum value of the irradiance curve corresponding to a passing cloud.
- Subtract each irradiance sample to the maximum obtained in the first step.
- Divide by the maximum of the curve to normalize and get 1 as maximum.
2.3. PID Tuning Method
2.3.1. Most Suitable Feedforward Signal for PID Tuning Based on the Relationship between System Voltage, Derivative of Irradiance and Output Frequency
2.3.2. Tuning Process
- smaller than optimal.
- larger than optimal.
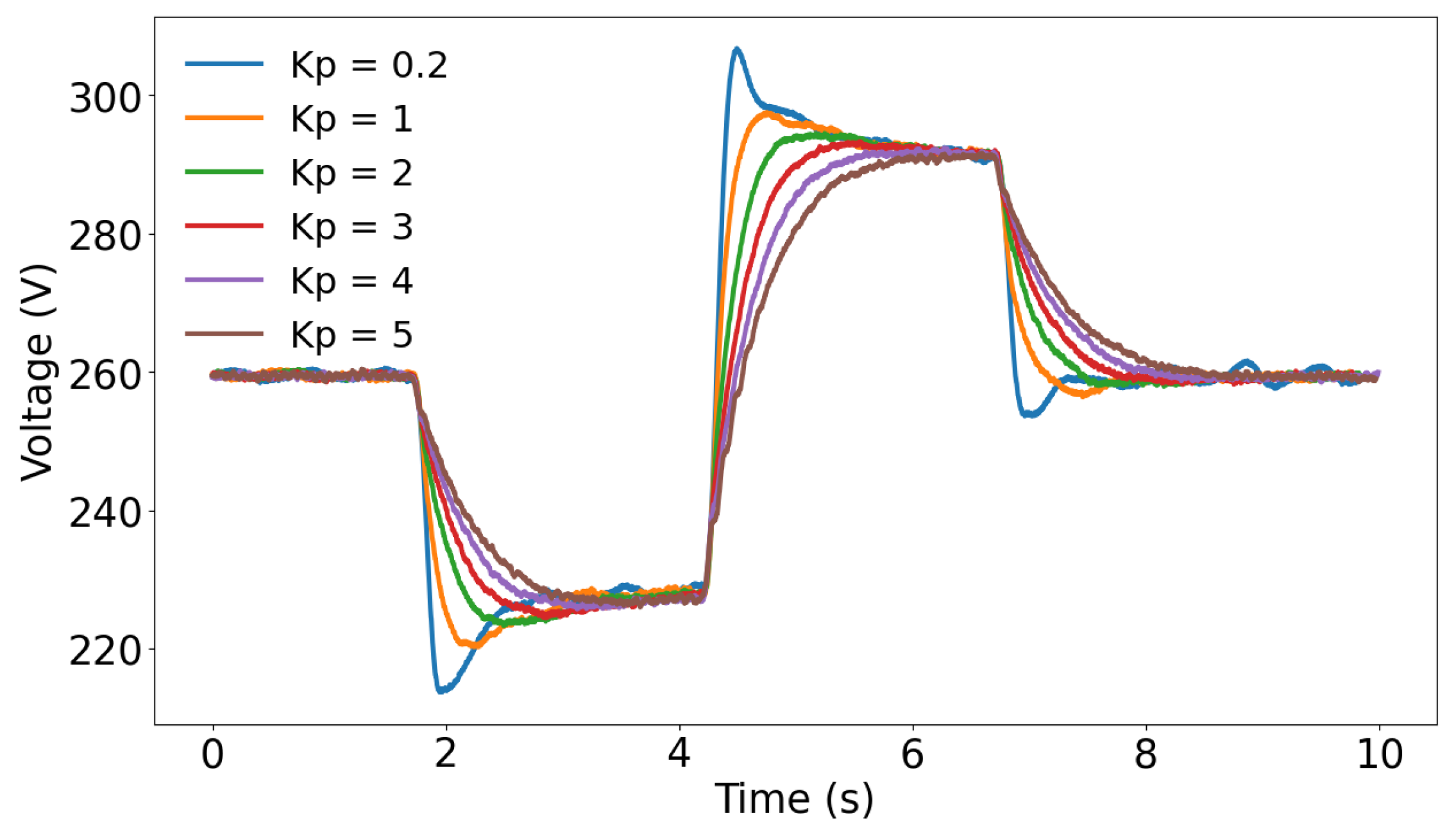
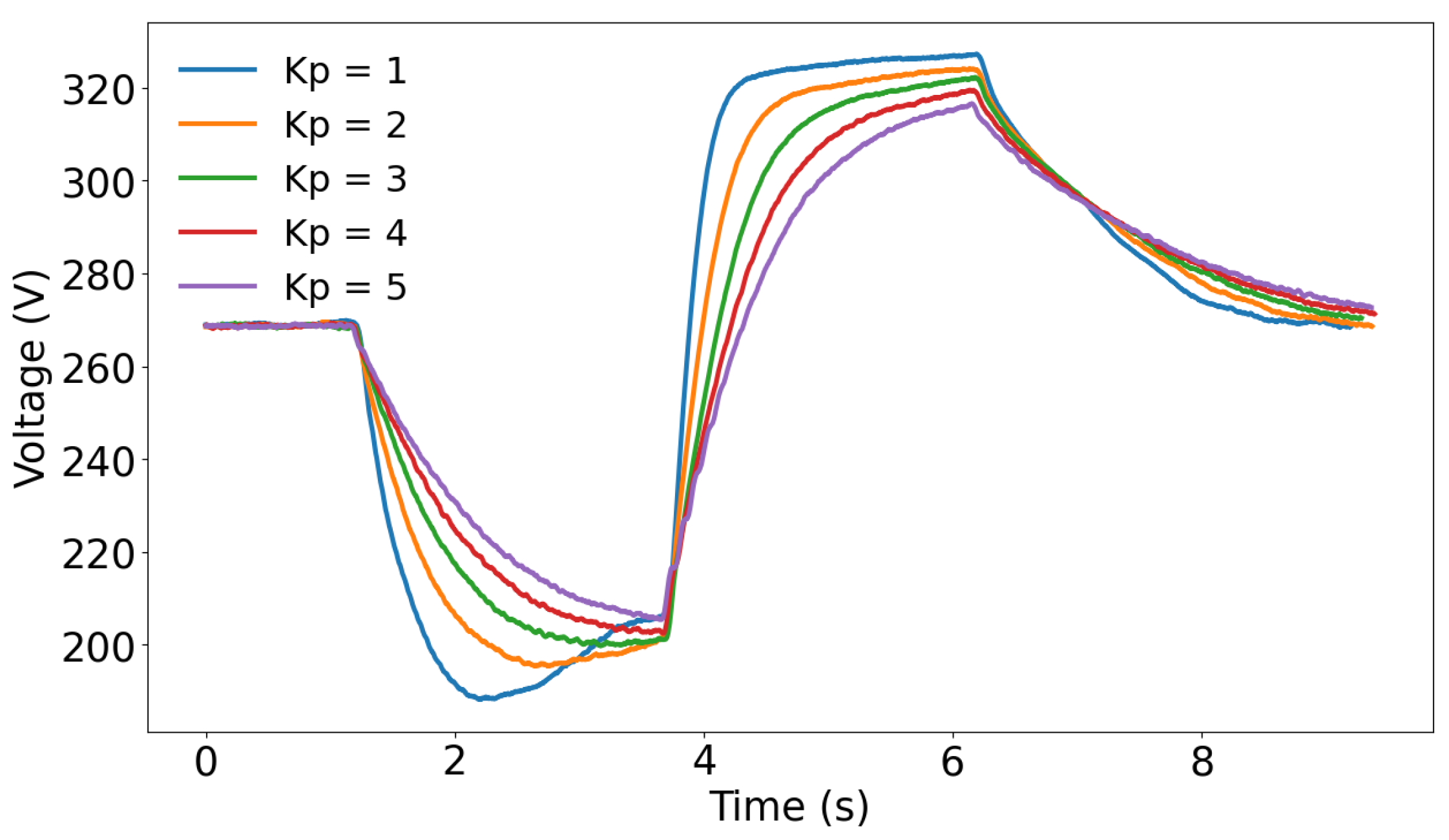
- modifies the system voltage waveform. The larger is, the smoother the step of the squared signal of the system voltage. If it is too small, oscillation occurs, which can be dangerous for the PVIS. This is true when using small , which is what happens in this type of system.
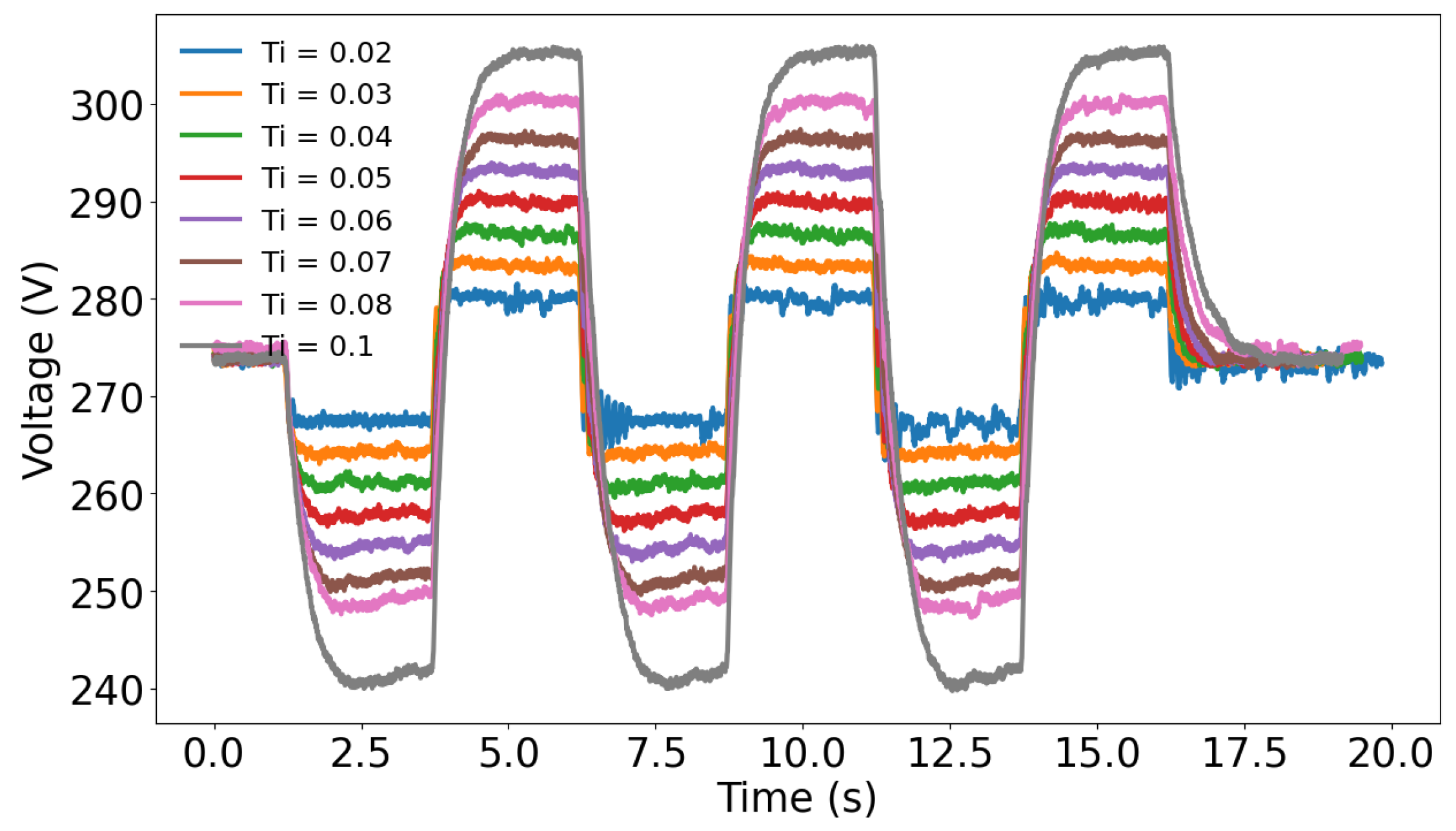
- modifies the total amplitude of the system voltage signal. Low values result in low amplitudes, but making it too small results in an unstable and oscillating system.
- A triangular feedforward signal with a certain amplitude is chosen. At the beginning it should be very small but enough to produce a noticeable disturbance. It is important to note that it is not sufficient to introduce only a single disturbance. A train of at least two pulses of the triangular signal shall be introduced.A train of changes in the slope of the signal will produce more noticeable disturbances that would not occur with a single pulse.
- The value of is progressively increased and the triangular pulse train is reintroduced until the voltage response is as close as possible to a square wave. If a waveform as close to a square wave as possible is not achieved, the value of should be slightly reduced. See details in Section 3.2.1.
- The is gradually lowered until a small amplitude is reached in the train of square pulses of the system voltage, but without causing the system to oscillate and become unstable.
- The amplitude of the triangular signal is slightly increased so that the disturbance in the system voltage is greater. Repeat steps 2 and 3 again adjusting the parameters until the triangular signal amplitude is close to the maximum of the input feedforward (50 Hz) and is supported by the system.
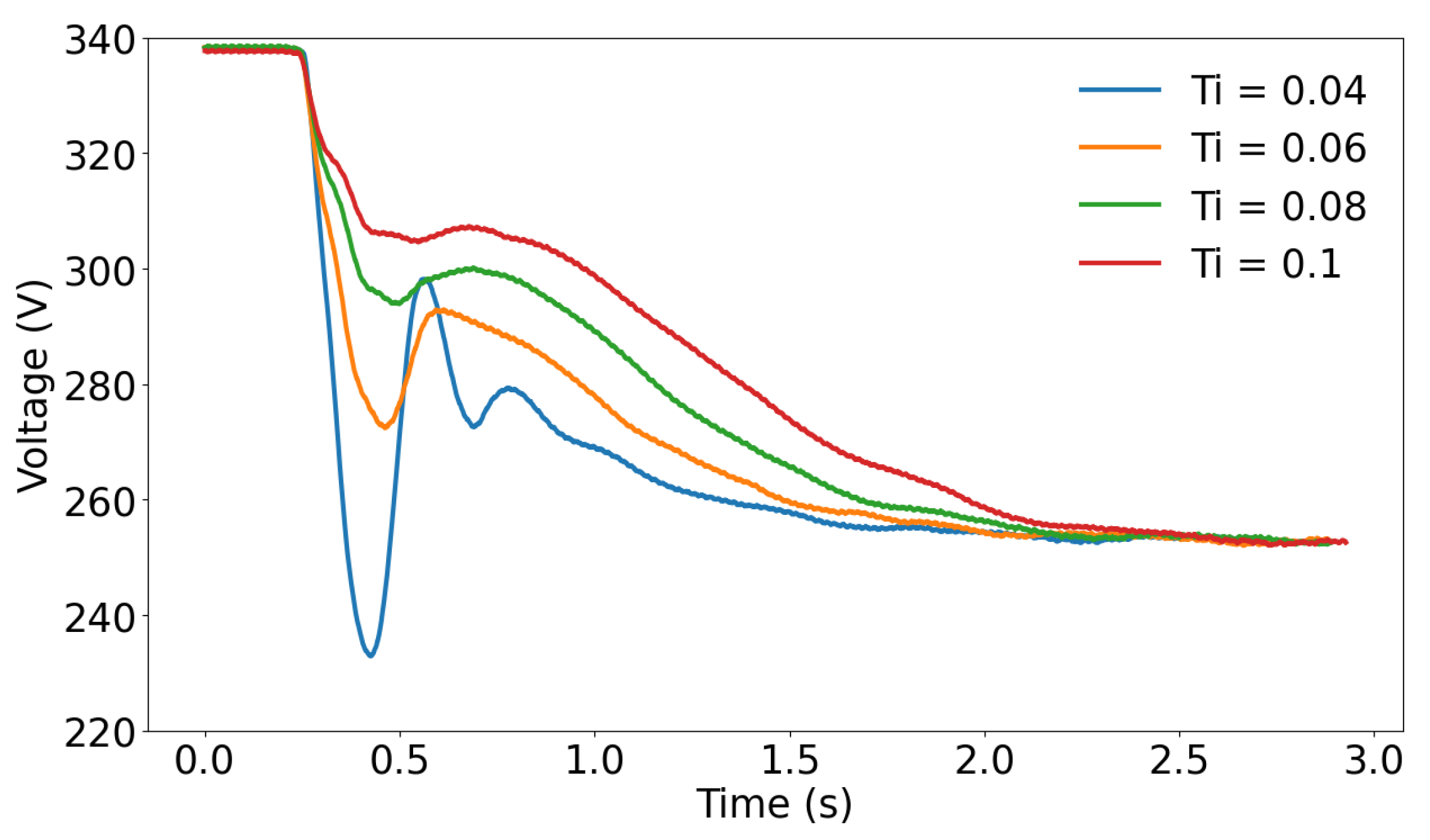
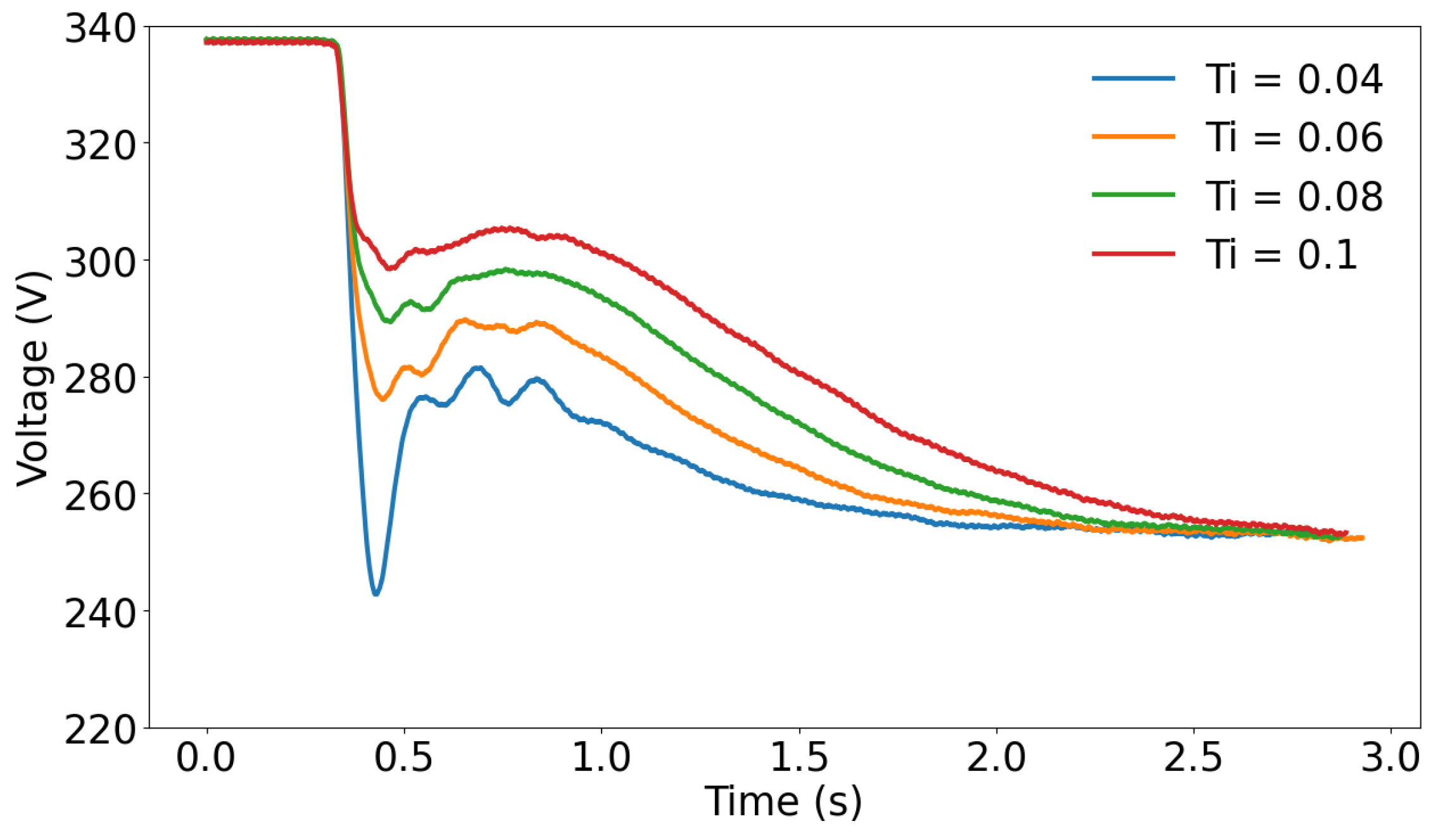
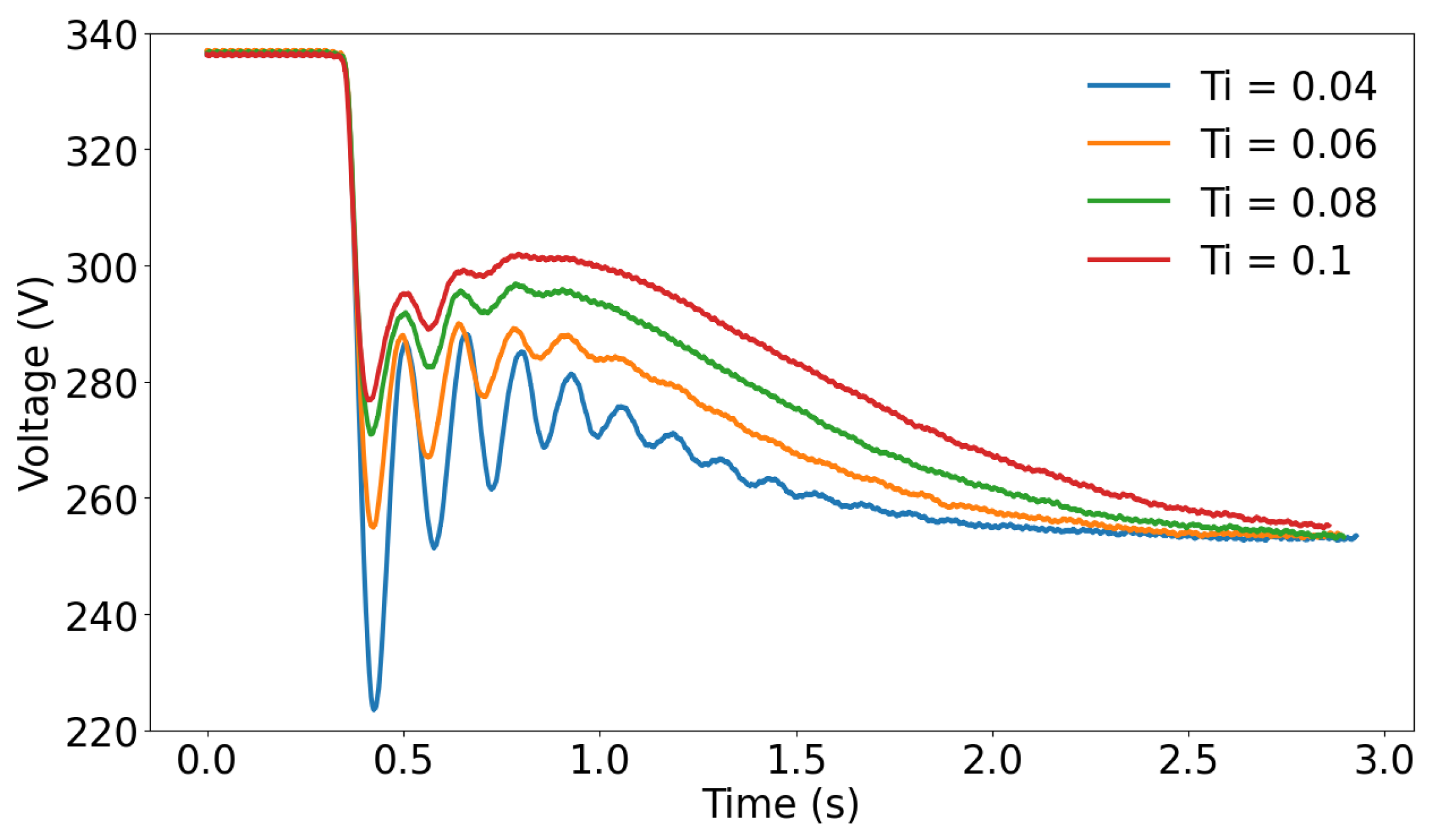
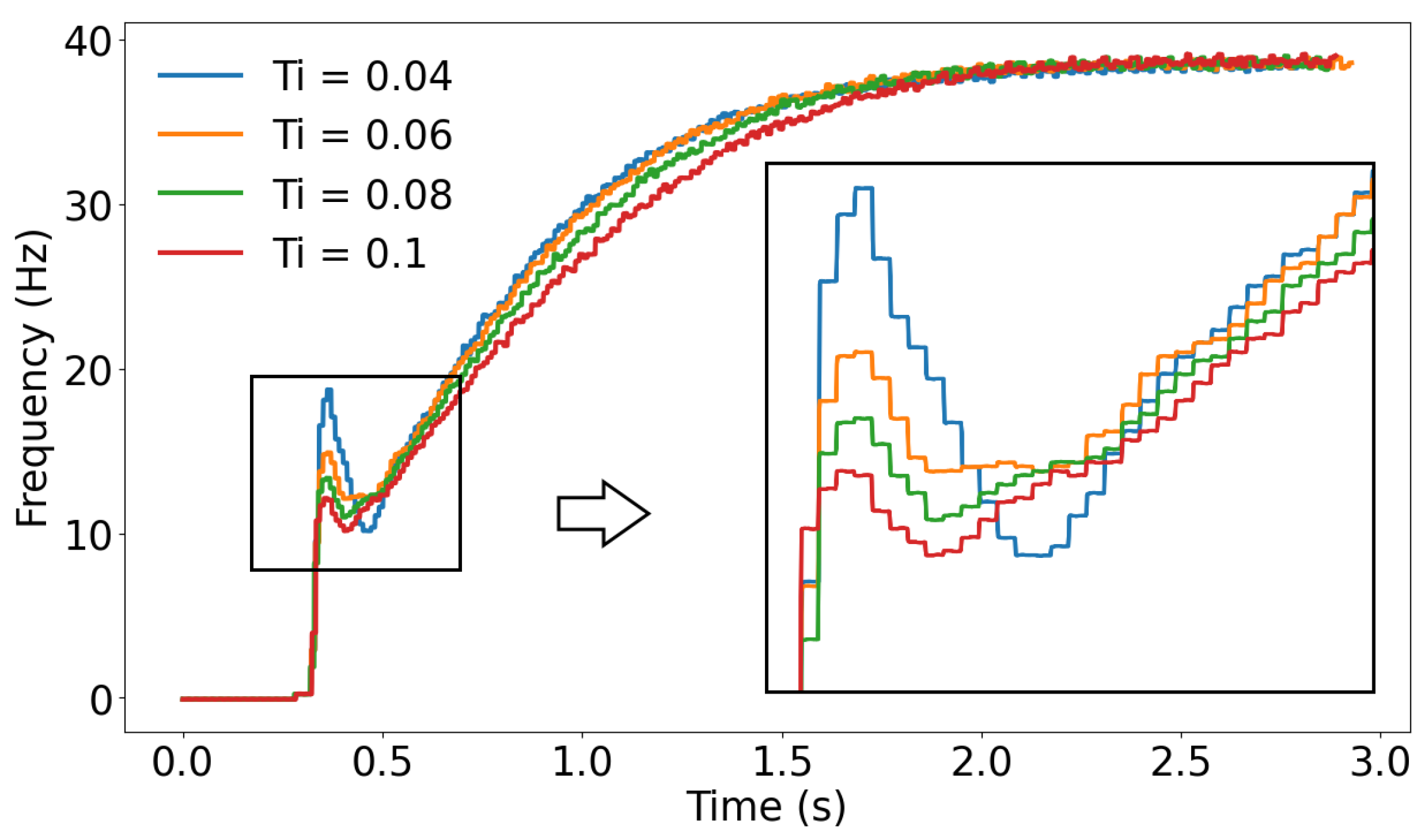
2.3.3. Tuning for Start-Up
- Program an adaptive PI. This means that the PI parameters at start-up and in normal operation will be different.
- Compromise to obtain an acceptable start and behaviour in all situations.
3. Results
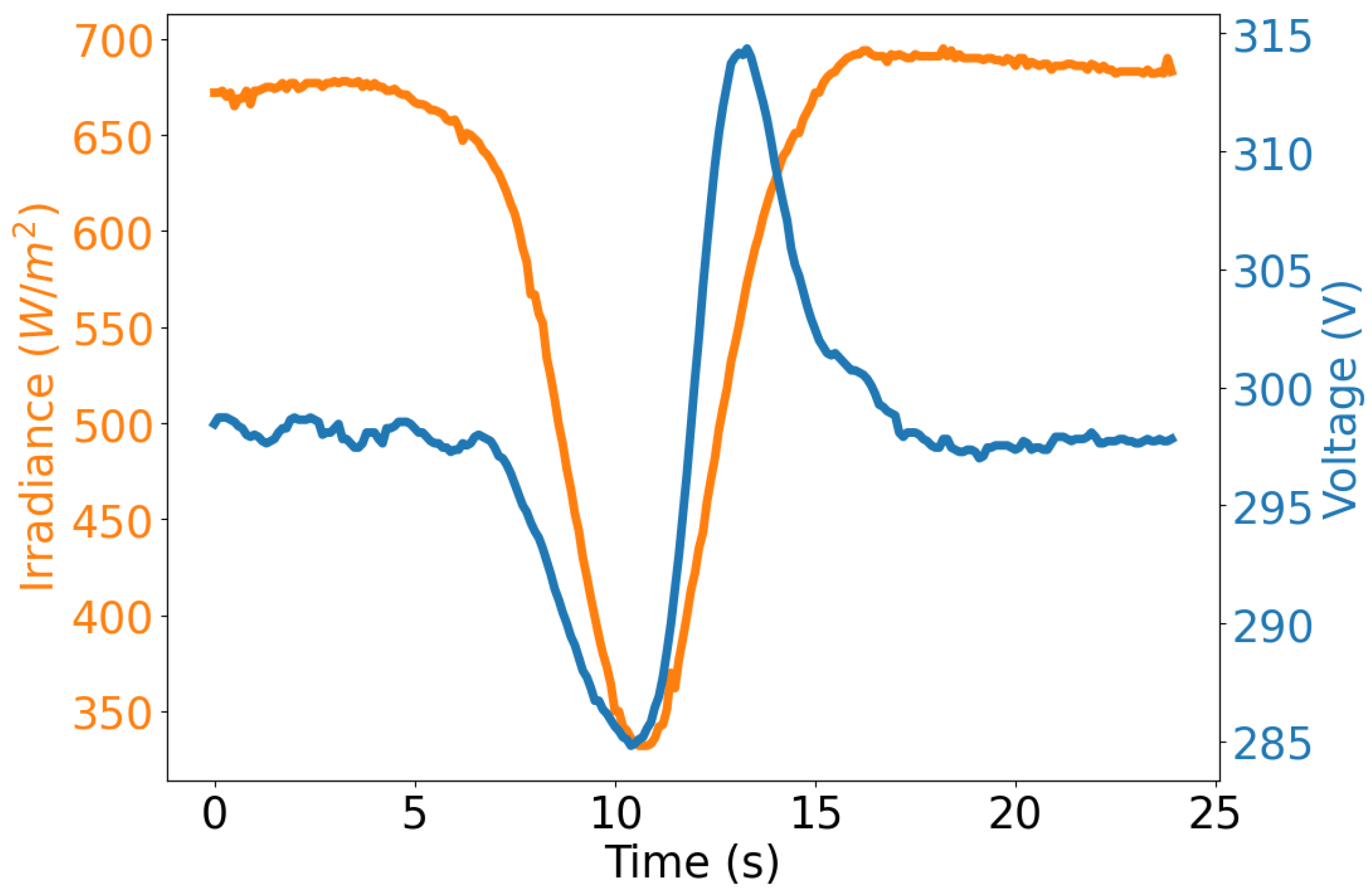
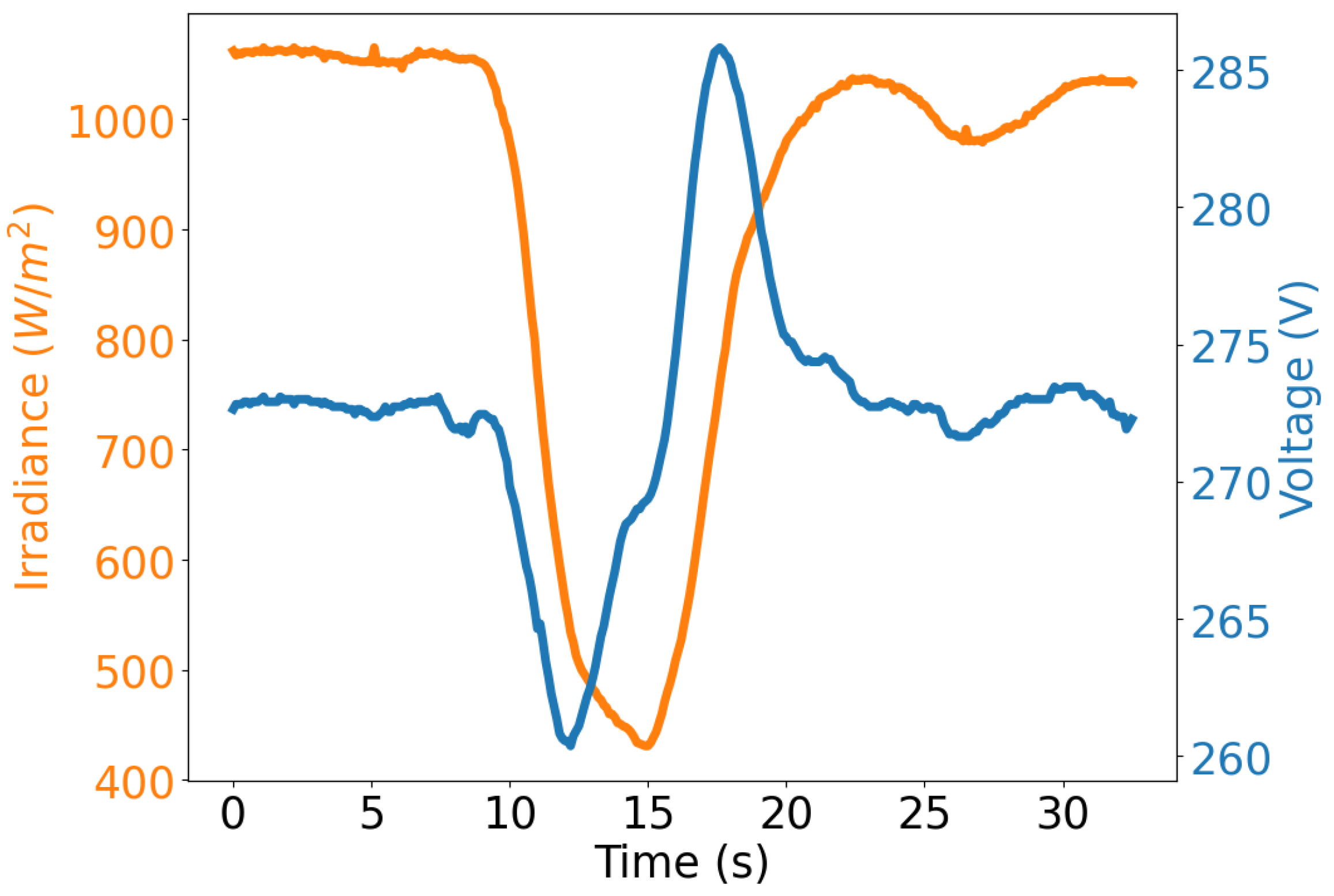
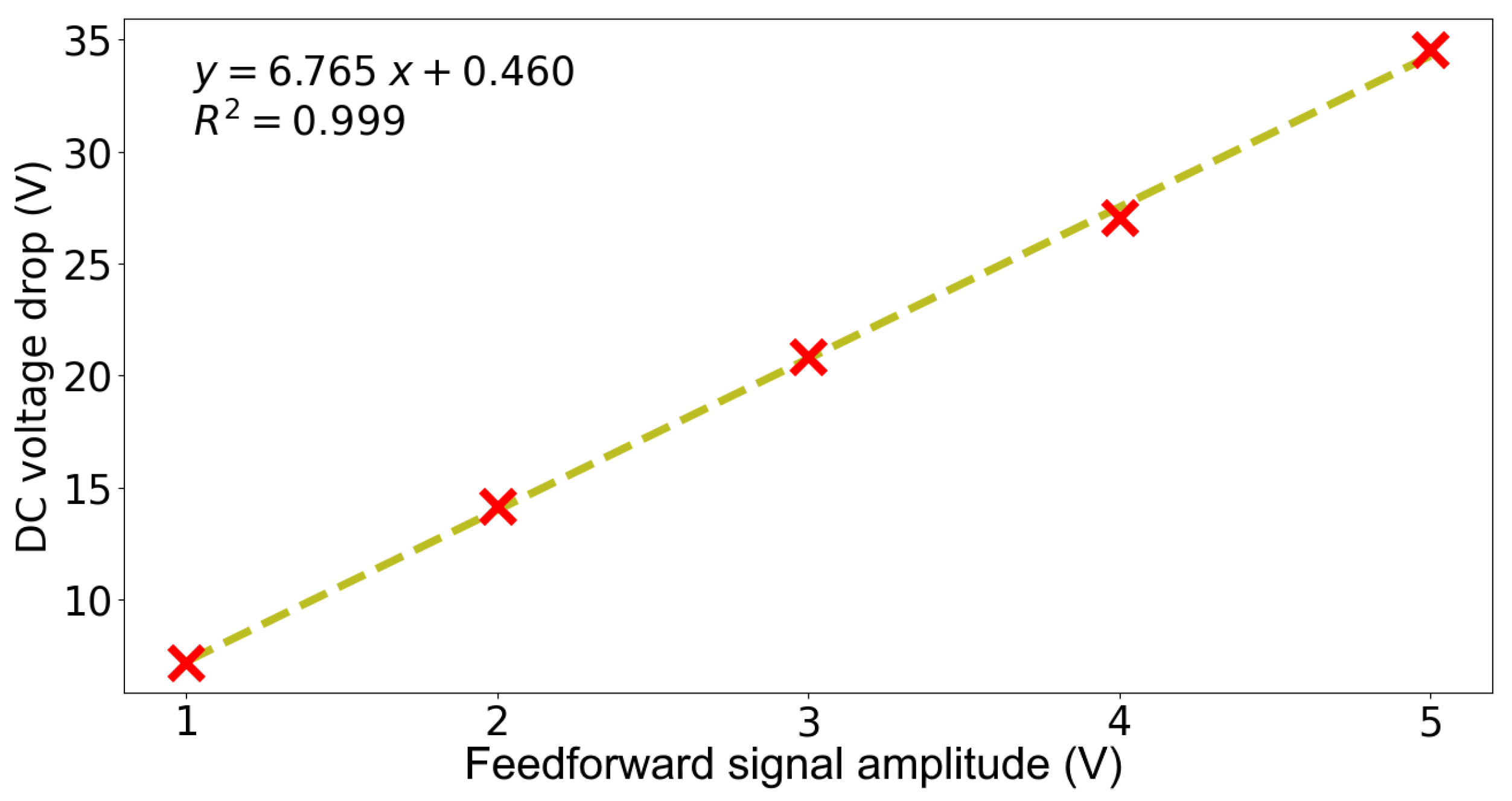
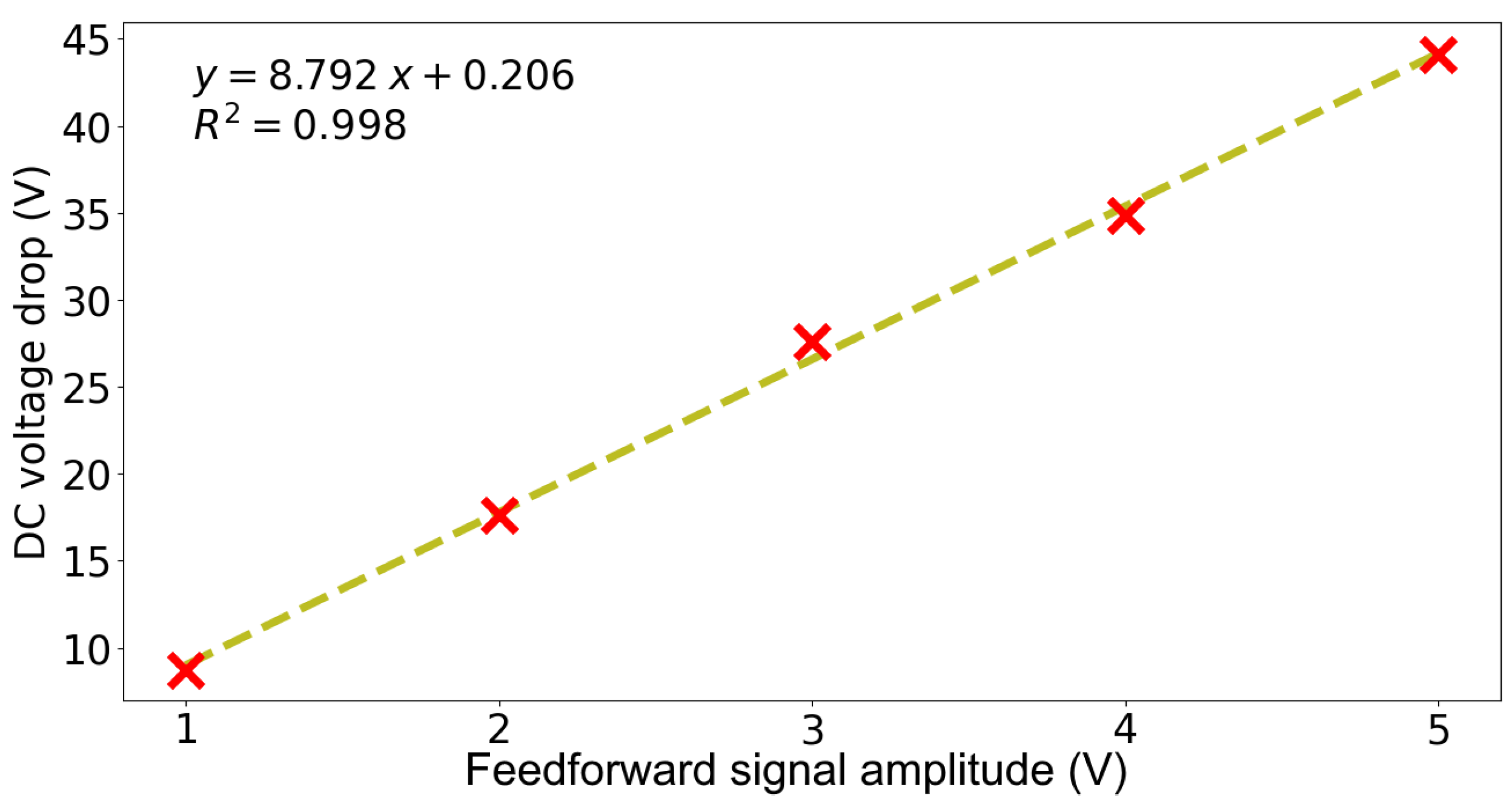
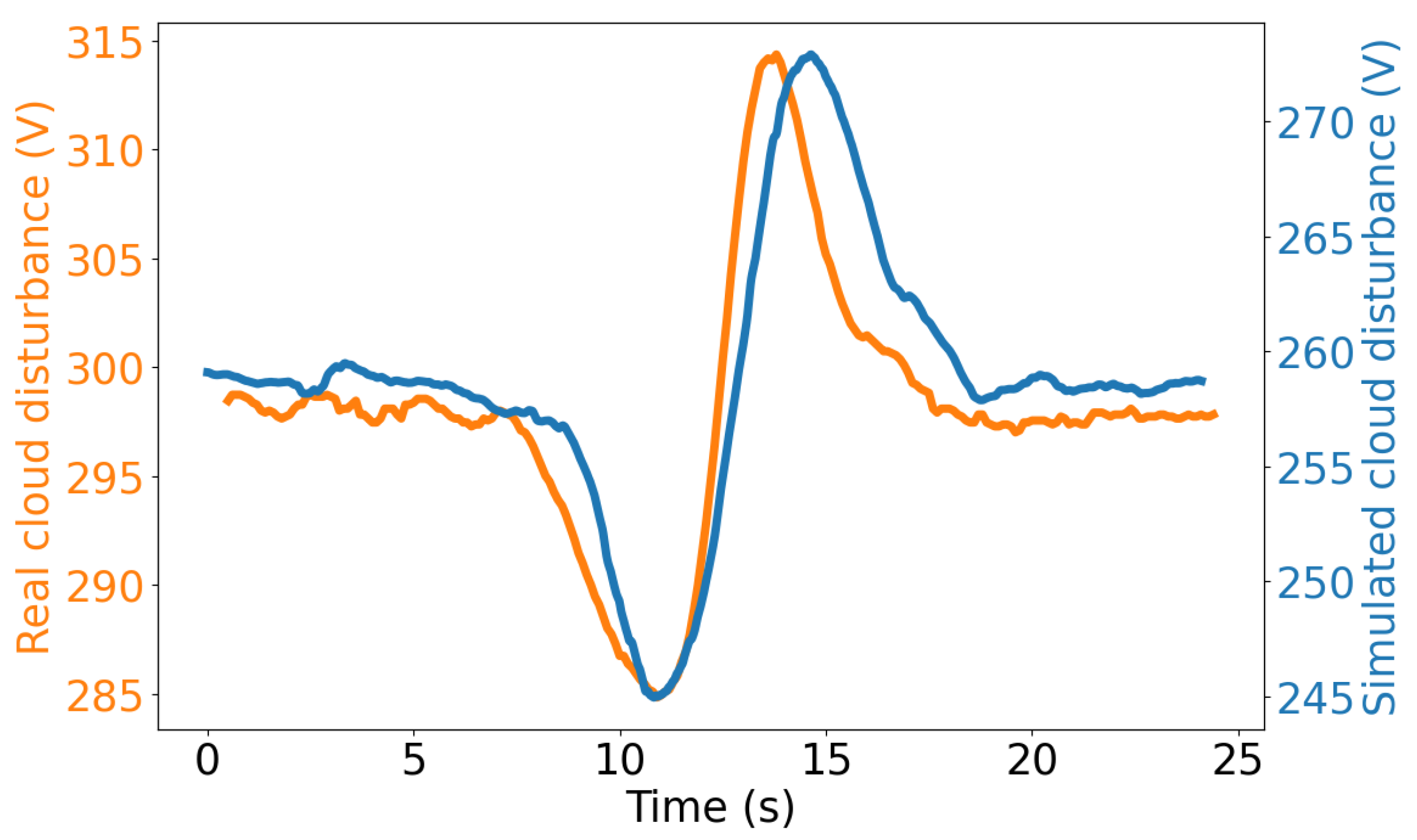
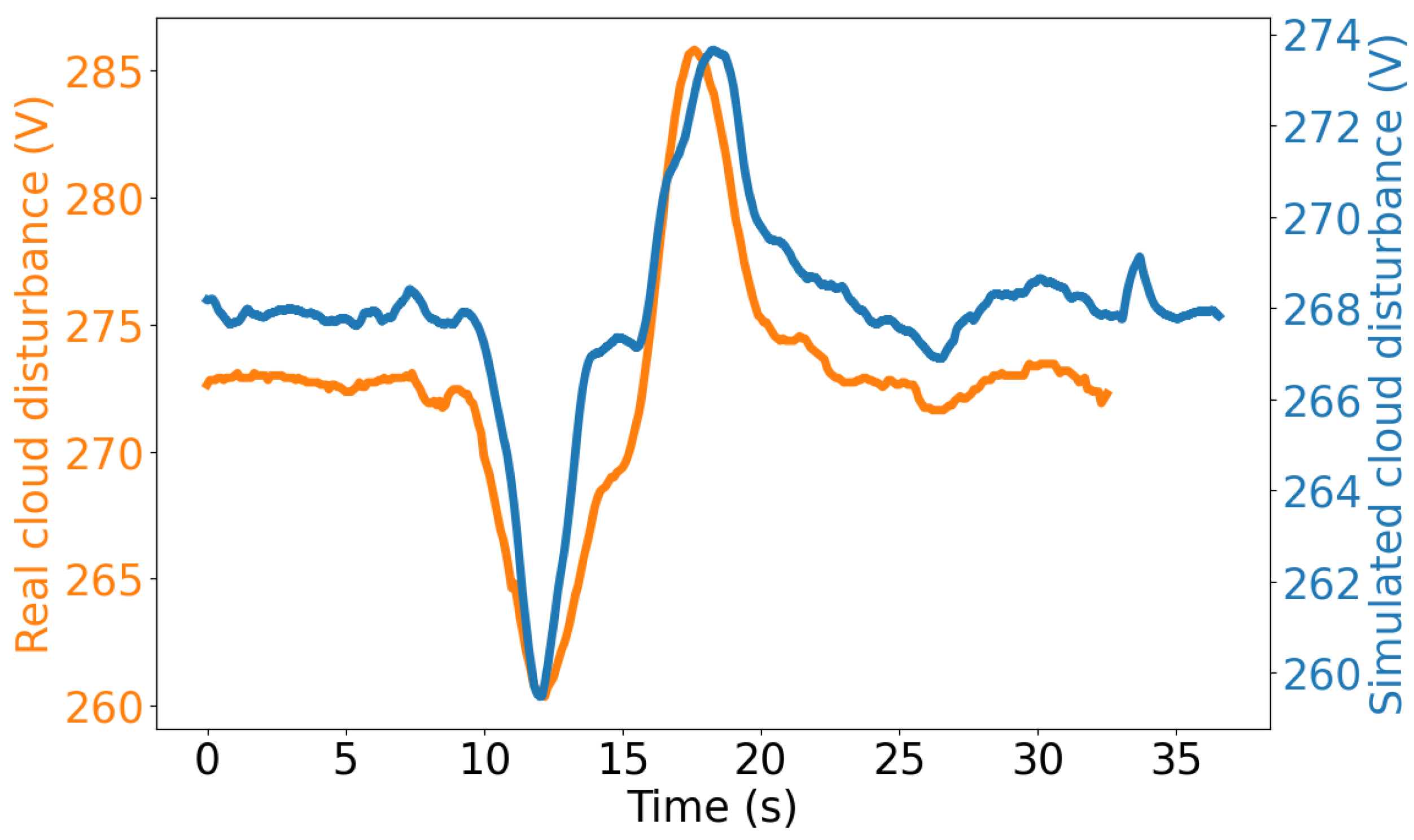
3.1. Results Related with the Simulation of System Voltage Drop Caused by Passing Clouds
3.2. Results Related with the New PI Tuning Method
3.2.1. Tuning for Normal Operation
3.2.2. Tuning for Start-Up
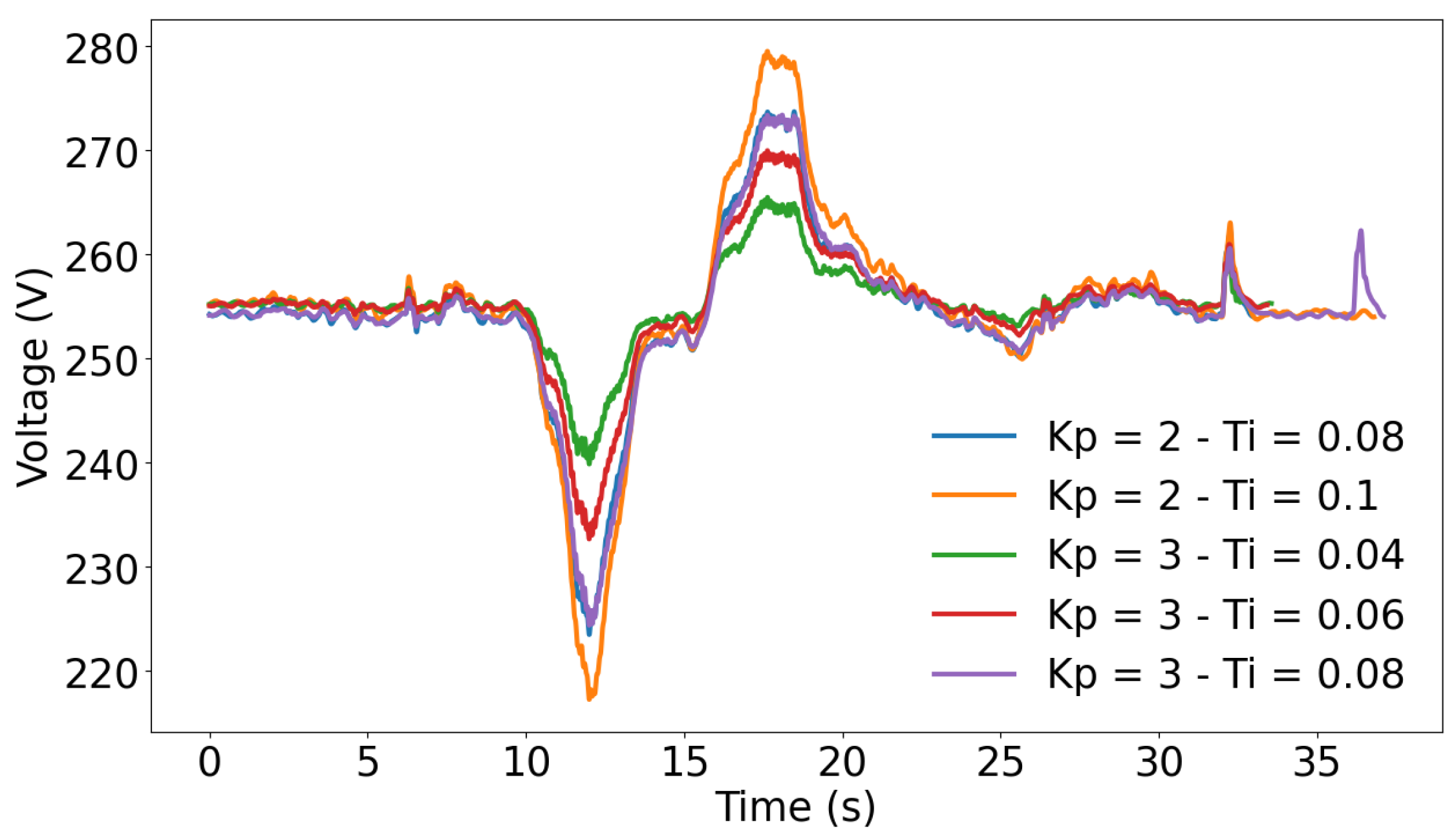
3.2.3. Influence of PI Tuning on the System Voltage Drop Simulation
3.3. About the Generalization of the Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VFD | Variable Frequency Drive |
| V | Voltage |
| PV | Photovoltaic |
| PVIS | Photovoltaic Irrigation Systems |
References
- Langarita, R.; Chóliz, J.S.; Sarasa, C.; Duarte, R.; Jiménez, S. Electricity costs in irrigated agriculture: A case study for an irrigation scheme in Spain. Renew. Sustain. Energy Rev. 2017, 68, 1008–1019. [Google Scholar] [CrossRef]
- Khiareddine, A.; Ben Salah, C.; Mimouni, M.F. Power management of a photovoltaic/battery pumping system in agricultural experiment station. Sol. Energy 2015, 112, 319–338. [Google Scholar] [CrossRef]
- Das, M.; Mandal, R. A comparative performance analysis of direct, with battery, supercapacitor, and battery-supercapacitor enabled photovoltaic water pumping systems using centrifugal pump. Sol. Energy 2018, 171, 302–309. [Google Scholar] [CrossRef]
- Bhayo, B.A.; Al-Kayiem, H.H.; Gilani, S.I. Assessment of standalone solar PV-Battery system for electricity generation and utilization of excess power for water pumping. Sol. Energy 2019, 194, 766–776. [Google Scholar] [CrossRef]
- Almeida, R.; Carrêlo, I.; Carrasco, L.; Martínez-Moreno, F.; Narvarte, L. Large-scale hybrid PV-Grid irrigation system. SISIFO 2017, 5, 6. [Google Scholar]
- Abella, M.; Lorenzo, E.; Chenlo, F. PV water pumping systems based on standard frequency converters. Prog. Photovolt. Res. Appl. 2003, 11, 179–191. [Google Scholar] [CrossRef]
- Valer, L.R.; Melendez, T.A.; Fedrizzi, M.C.; Zilles, R.; de Moraes, A.M. Variable-speed drives in photovoltaic pumping systems for irrigation in Brazil. Sustain. Energy Technol. Assessm. 2016, 15, 20–26. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hagglund, T. Advanced PID Control; ISA: Research Triangle Park, NC, USA, 2009. [Google Scholar]
- Brito, A.; Zilles, R. Systematized procedure for parameter characterization of a variable-speed drive used in photovoltaic pumping applications. Prog. Photovolt. Res. Appl. 2006, 14, 249–260. [Google Scholar] [CrossRef]
- Fernández-Ramos, J.; Narvarte-Fernández, L.; Poza-Saura, F. Improvement of photovoltaic pumping systems based on standard frequency converters by means of programmable logic controllers. Sol. Energy 2010, 84, 101–109. [Google Scholar] [CrossRef]
- Herraiz, J.I.; Fernández-Ramos, J.; Almeida, R.H.; Báguena, E.M.; Castillo-Cagigal, M.; Narvarte, L. On The Tuning and Performance Of Stand-Alone Large-Power Pv Irrigation Systems. Energy Convers. Manag. 2022, 13, 100175. [Google Scholar] [CrossRef]
- Fernández-Ramos, J.; Narvarte, L.; López-Soria, R.; Almeida, R.; Carrêlo, I. An assessment of the proportional-integral control tuning rules applied to Photovoltaic Irrigation Systems based on Standard Frequency Converters. Sol. Energy 2019, 191, 468–480. [Google Scholar] [CrossRef]
- Hägglund, T.; Åström, K.J. Revisiting the Ziegler-Nichols tuning rules for PI control. Asian J. Control 2002, 4, 364–380. [Google Scholar] [CrossRef]
- Hägglund, T.; Åström, K.J. Revisiting the Ziegler-Nichols tuning rules for PI control—Part II the frequency response method. Asian J. Control 2004, 6, 469–482. [Google Scholar] [CrossRef]
- Jewell, W.; Ramakumar, R. The Effects of Moving Clouds on Electric Utilities with Dispersed Photovoltaic Generation. IEEE Trans. Energy Convers. 1987, EC-2, 570–576. [Google Scholar] [CrossRef]
- Jewell, W.; Unruh, T. Limits on cloud-induced fluctuation in photovoltaic generation. IEEE Trans. Energy Convers. 1990, 5, 8–14. [Google Scholar] [CrossRef]
- Hoff, T.E.; Perez, R. Quantifying PV power Output Variability. Sol. Energy 2010, 84, 1782–1793. [Google Scholar] [CrossRef]
- Lave, M.; Kleissl, J. Cloud speed impact on solar variability scaling—Application to the wavelet variability model. Sol. Energy 2013, 91, 11–21. [Google Scholar] [CrossRef]
- Marcos, J.; Marroyo, L.; Lorenzo, E.; Alvira, D.; Izco, E. Power output fluctuations in large scale PV plants: One year observations with one second resolution and a derived analytic model. Prog. Photovolt. Res. Appl. 2011, 19, 218–227. [Google Scholar] [CrossRef]
- Kuszamaul, S.; Ellis, A.; Stein, J.; Johnson, L. Lanai High-Density Irradiance Sensor Network for characterizing solar resource variability of MW-scale PV system. In Proceedings of the 2010 35th IEEE Photovoltaic Specialists Conference, Honolulu, HI, USA, 20–25 June 2010; pp. 283–288. [Google Scholar] [CrossRef]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. A Novel Approach for Ramp-Rate Control of Solar PV Using Energy Storage to Mitigate Output Fluctuations Caused by Cloud Passing. IEEE Trans. Energy Convers. 2014, 29, 507–518. [Google Scholar] [CrossRef]
- Beltran, H.; Bilbao, E.; Belenguer, E.; Etxeberria-Otadui, I.; Rodriguez, P. Evaluation of Storage Energy Requirements for Constant Production in PV Power Plants. IEEE Trans. Ind. Electron. 2013, 60, 1225–1234. [Google Scholar] [CrossRef]
- Han, X.; Chen, F.; Cui, X.; Li, Y.; Li, X. A Power Smoothing Control Strategy and Optimized Allocation of Battery Capacity Based on Hybrid Storage Energy Technology. Energies 2012, 5, 1593–1612. [Google Scholar] [CrossRef]
- Kakimoto, N.; Satoh, H.; Takayama, S.; Nakamura, K. Ramp-Rate Control of Photovoltaic Generator With Electric Double-Layer Capacitor. IEEE Trans. Energy Convers. 2009, 24, 465–473. [Google Scholar] [CrossRef]
- Darras, C.; Muselli, M.; Poggi, P.; Voyant, C.; Hoguet, J.C.; Montignac, F. PV output power fluctuations smoothing: The MYRTE platform experience. Int. J. Hydrogen Energy 2012, 37, 14015–14025. [Google Scholar] [CrossRef]
- Marcos, J.; Marroyo, L.; Lorenzo, E.; Alvira, D.; Izco, E. From irradiance to output power fluctuations: The PV plant as a low pass filter. Prog. Photovolt. Res. Appl. 2011, 19, 505–510. [Google Scholar] [CrossRef]
- Marcos, J.; Marroyo, L.; Lorenzo, E.; García, M. Smoothing of PV power fluctuations by geographical dispersion. Prog. Photovolt. Res. Appl. 2012, 20, 226–237. [Google Scholar] [CrossRef]
- Lave, M.; Kleissl, J.; Arias-Castro, E. High-frequency irradiance fluctuations and geographic smoothing. Sol. Energy 2012, 86, 2190–2199. [Google Scholar] [CrossRef]
- Perez, R.; Kivalov, S.; Schlemmer, J.; Hemker, K.; Hoff, T.E. Short-term irradiance variability: Preliminary estimation of station pair correlation as a function of distance. Sol. Energy 2012, 86, 2170–2176. [Google Scholar] [CrossRef]
- Perpiñán, O.; Marcos, J.; Lorenzo, E. Electrical power fluctuations in a network of DC/AC inverters in a large PV plant: Relationship between correlation, distance and time scale. Sol. Energy 2013, 88, 227–241. [Google Scholar] [CrossRef]
- Gilman, F.C. Testing Pumps as Fans and Fans as Pumps. J. Eng. Power 1968, 90, 140–142. [Google Scholar] [CrossRef]
- King, J.A. Testing Pumps in Air. J. Eng. Power 1968, 90, 97–104. [Google Scholar] [CrossRef]
- Bario, F.; Barral, L.; Bois, G. Air Test Flow Analysis of the Hydrogen Pump of Vulcain Rocket Engine. J. Fluids Eng. 1991, 113, 654–659. [Google Scholar] [CrossRef]
- Choi, J.S.; McLaughlin, D.K.; Thompson, D.E. Experiments on the unsteady flow field and noise generation in a centrifugal pump impeller. J. Sound Vib. 2003, 263, 493–514. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DC Voltage Drop (V) | ||
|---|---|---|
| Feedforward Amplitude (V) | Cloud 1 | Cloud 2 |
| 1 | 7.19 | 8.73 |
| 2 | 14.14 | 17.63 |
| 3 | 20.84 | 27.63 |
| 4 | 27.05 | 34.82 |
| 5 | 34.56 | 44.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guillén-Arenas, F.J.; Fernández-Ramos, J.; Narvarte, L. A New Strategy for PI Tuning in Photovoltaic Irrigation Systems Based on Simulation of System Voltage Fluctuations Due to Passing Clouds. Energies 2022, 15, 7191. https://doi.org/10.3390/en15197191
Guillén-Arenas FJ, Fernández-Ramos J, Narvarte L. A New Strategy for PI Tuning in Photovoltaic Irrigation Systems Based on Simulation of System Voltage Fluctuations Due to Passing Clouds. Energies. 2022; 15(19):7191. https://doi.org/10.3390/en15197191
Chicago/Turabian StyleGuillén-Arenas, Francisco Jesús, José Fernández-Ramos, and Luis Narvarte. 2022. "A New Strategy for PI Tuning in Photovoltaic Irrigation Systems Based on Simulation of System Voltage Fluctuations Due to Passing Clouds" Energies 15, no. 19: 7191. https://doi.org/10.3390/en15197191