
Health Monitoring of Pressure Regulating Stations in Gas Distribution Networks Using Mathematical Models

 ,
,
Abstract
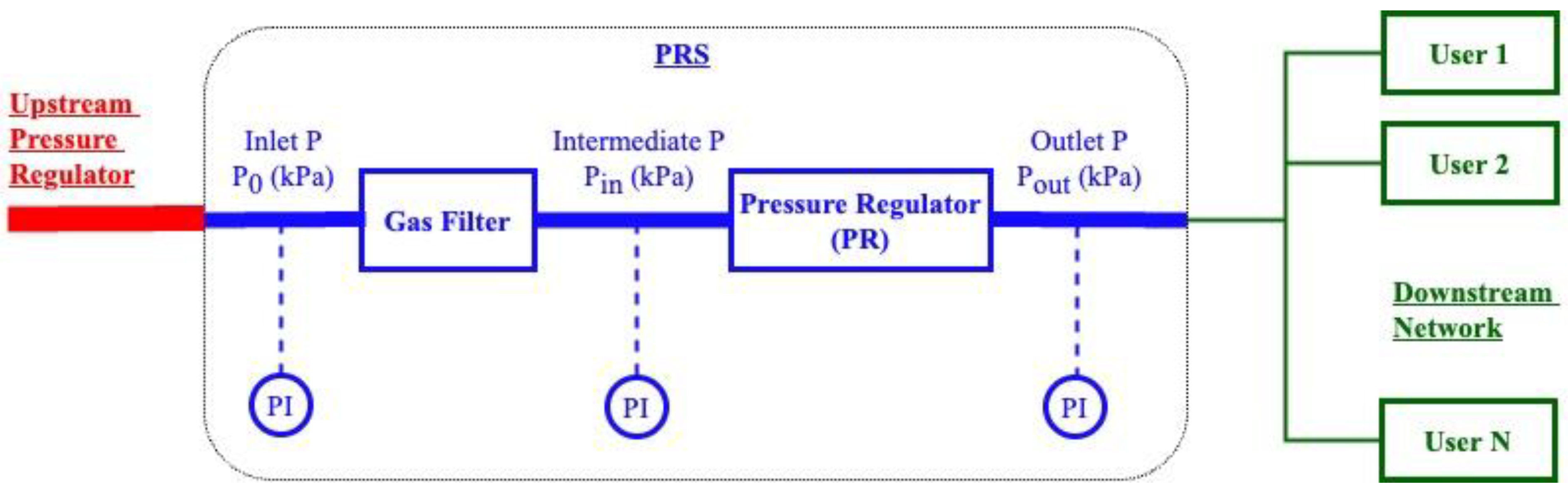
:1. Introduction
- Mathematical models for two different regulator types: spring-loaded and level-type regulators (the spring-loaded regulators had a significantly different valve seat geometry than those that were studied by Leo et al. [1]);
- Precise PR dimensions and calibration data that were obtained from the PRS vendors to determine the mathematical model parameters (in contrast, Leo et al. [1] assumed some parameters);
- In contrast to Leo et al. [1], this work used real data from a large existing GDN comprising both industrial and residential end-users (the GDN did not measure the flows through the PRs and rarely measured Pin);
- Significantly modified and advanced monitoring algorithms to address the following challenges for more robust and improved inferences: (a) higher noise levels in industrial data compared to the white noise that has been added to synthetic data, (b) the absence of some data from the GDN, and (c) pressure sensor errors in real data;
- A filter monitoring methodology that used Pin (or Po when Pin was not available) and Pout, whereas valve seat and diaphragm monitoring only required Pout (these advances are detailed in the Fault Monitoring Methodologies section).
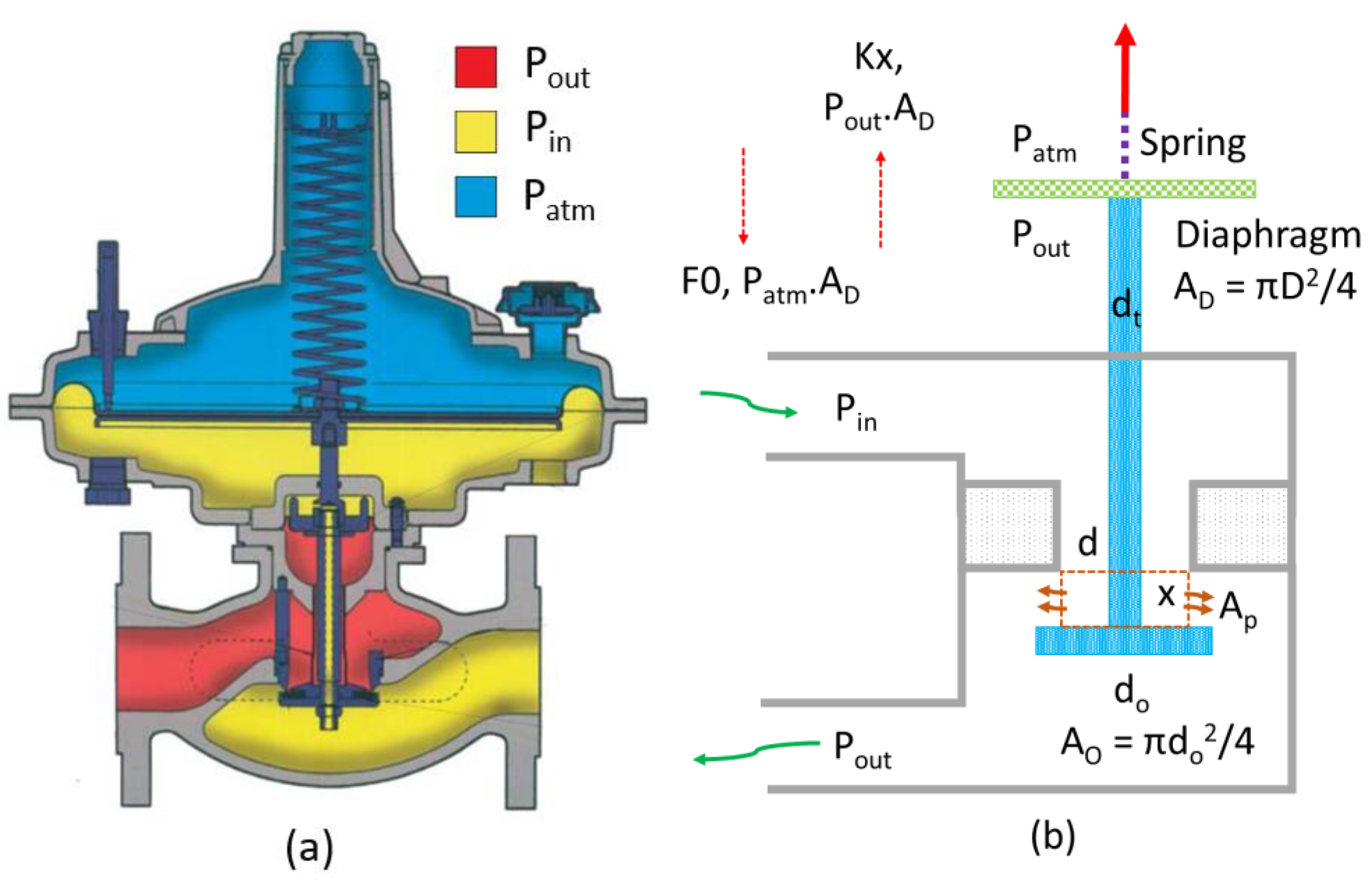
2. Mathematical Model for Spring-Loaded PRs
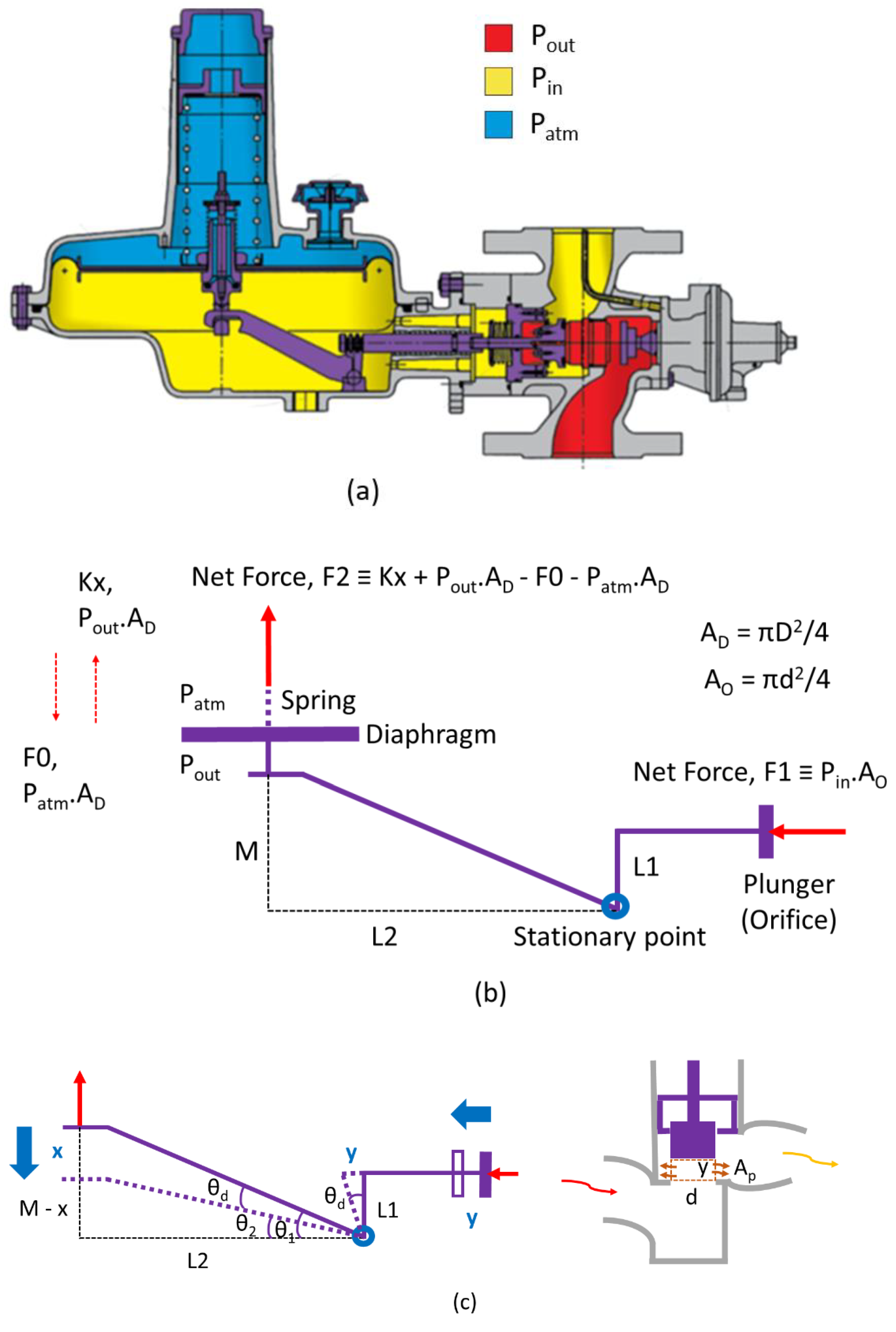
3. Mathematical Model for Lever-Type PRs
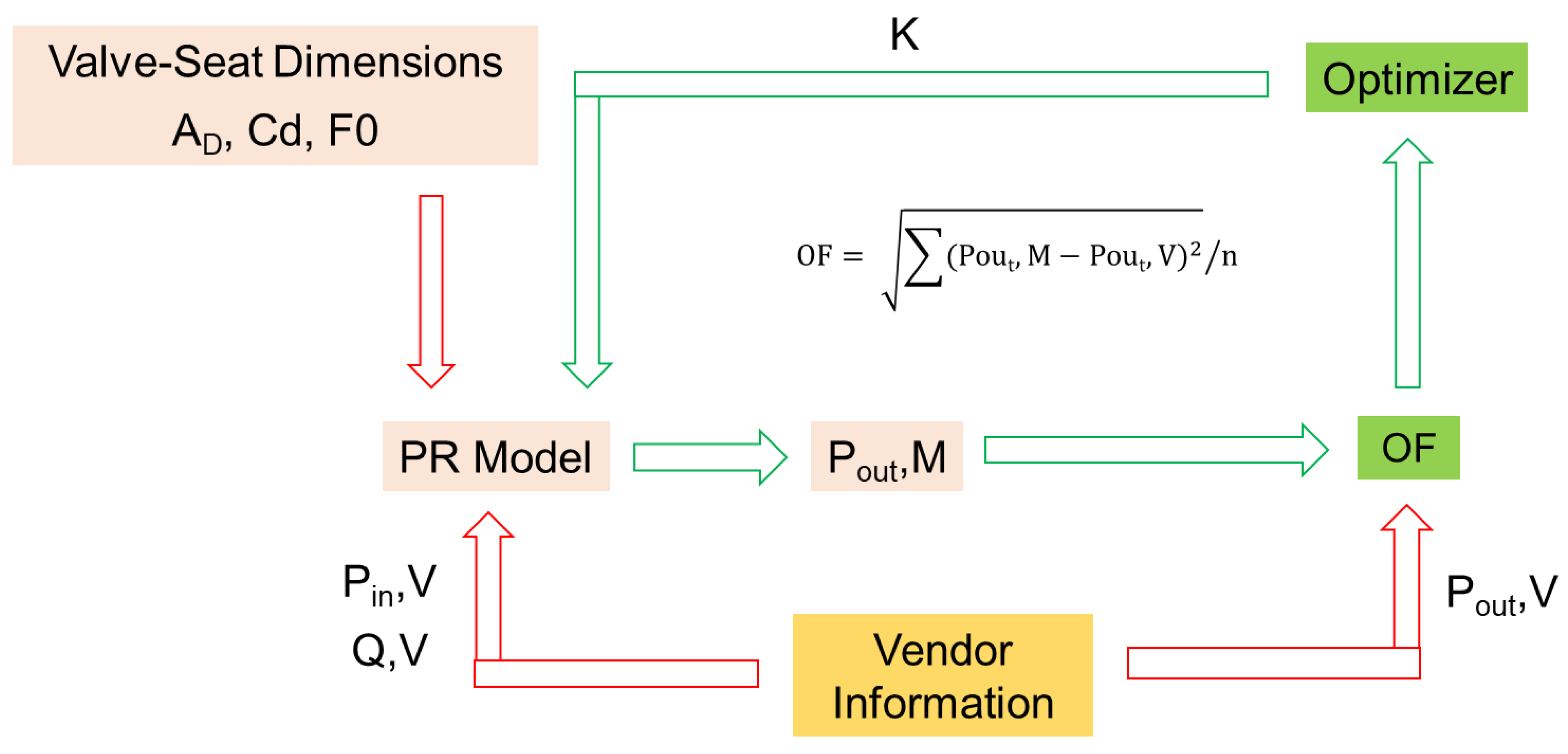
4. Model Parameters
5. Fault Monitoring Methodologies
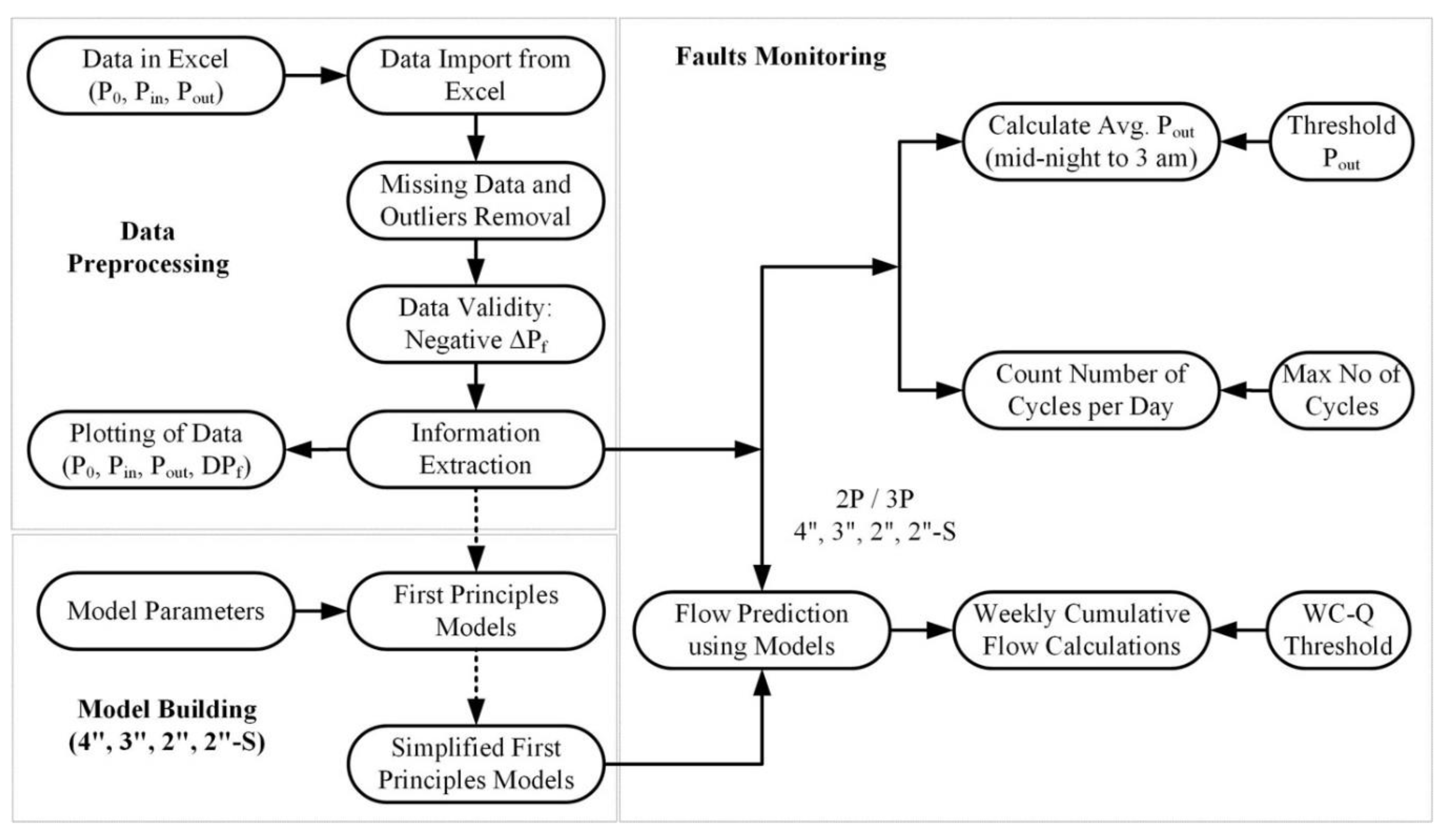
5.1. Data Preprocessing
- Data were imported from Excel into MATLAB. Each regulator had an Excel file with the date, time, inlet pressure (P0), intermediate pressure (Pin), and outlet pressure (Pout) data. Some did not have Pin data.
- When one pressure value was missing for a data point, then all of its pressure values were replaced by those for the previous data point. A pressure value was considered an outlier when it was more than three standard deviations away from the mean value. Outlier pressure values were replaced by the previous pressure value.
- Data were checked for valid pressure drops across the filter (ΔPf). The number (SN-ΔPf) of data samples with negative ΔPf values was computed. When SN-ΔPf was lower than 0.1% of the number of all samples, then those faulty pressure values were replaced by the mean values. Otherwise, New Pin = Old Pin − max (ΔPf).
- Important information was extracted, such as the start and end dates of the data, the number of days of data, and the number of samples for each day.
- Finally, the pressure data were visualized by plotting P0, Pin, Pout, and ΔPf against time.
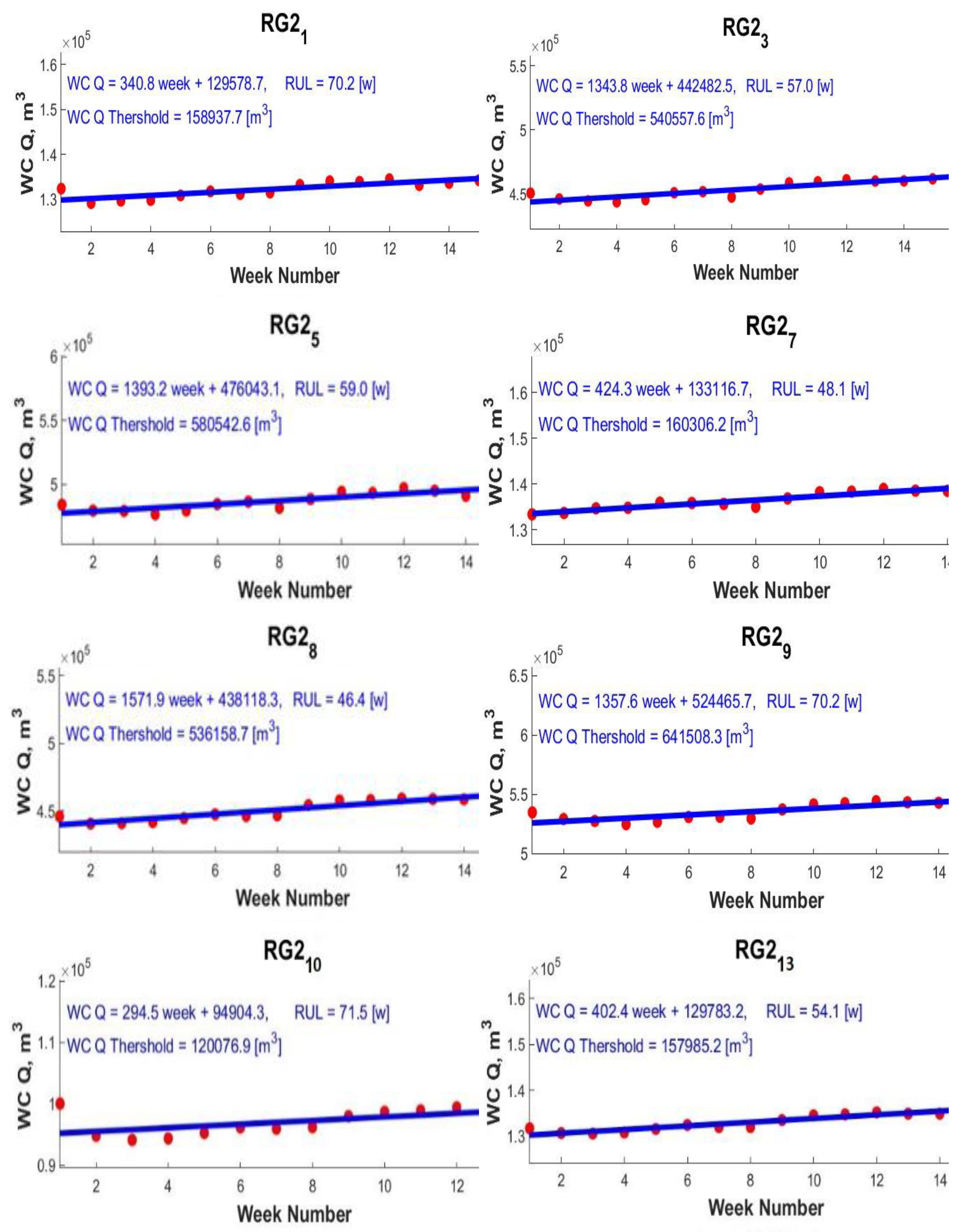
5.2. Filter Choking
- Input threshold WC-Q values for the PRs (4″, 3″, 2″, and 2″ SR);
- In the absence of Pin data, QM,2P = f (PR type, model parameters, P0, and Pout);
- When Pin is available, QM,3P = f (PR type, model parameters, Pin, and Pout);
- PR type: spring-loaded PR or lever-type PR;
- Calculate WC-Q;
- Plot WC-Q against time and obtain the best linear fit;
- From the linear fit, estimate the number of weeks for the current WC-Q to reach the threshold WC-Q. That was the estimate for the filter RUL.
5.3. Valve Seat Damage
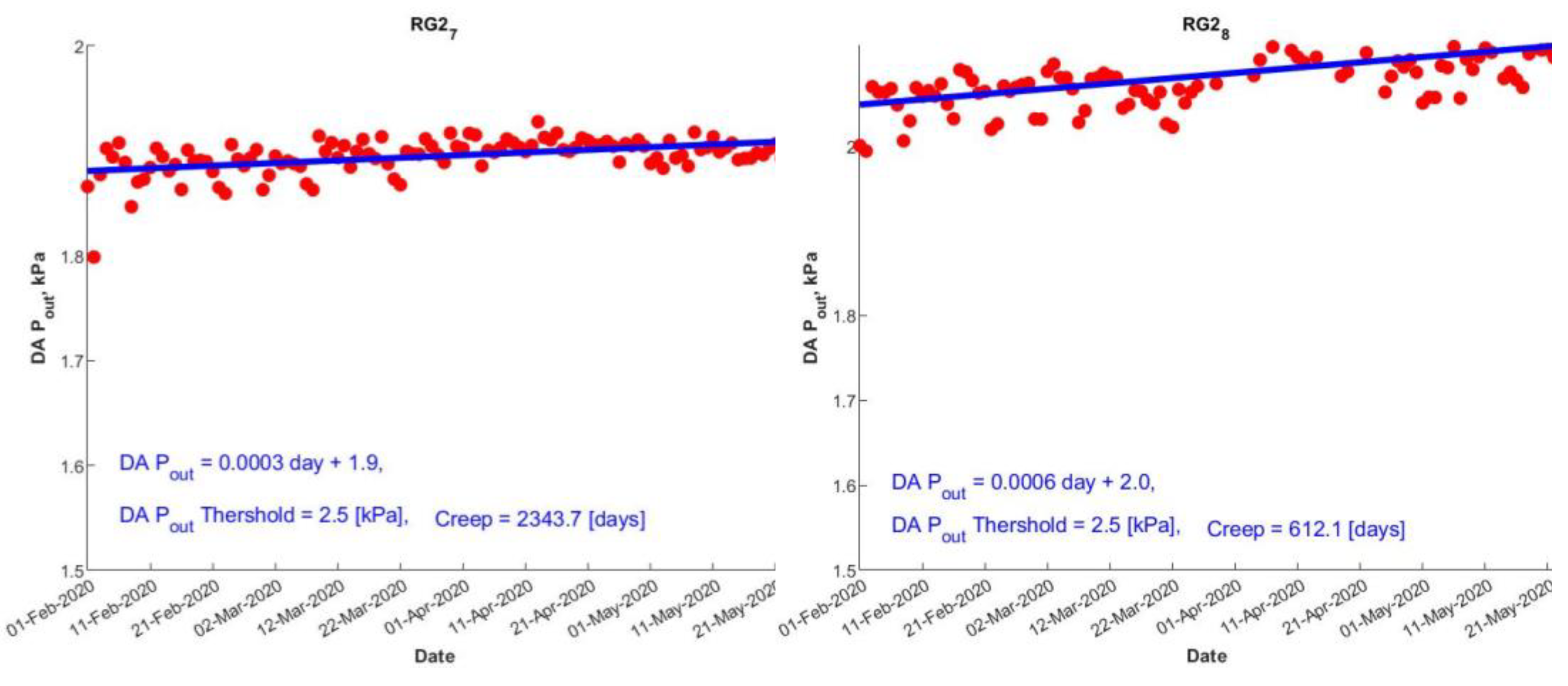
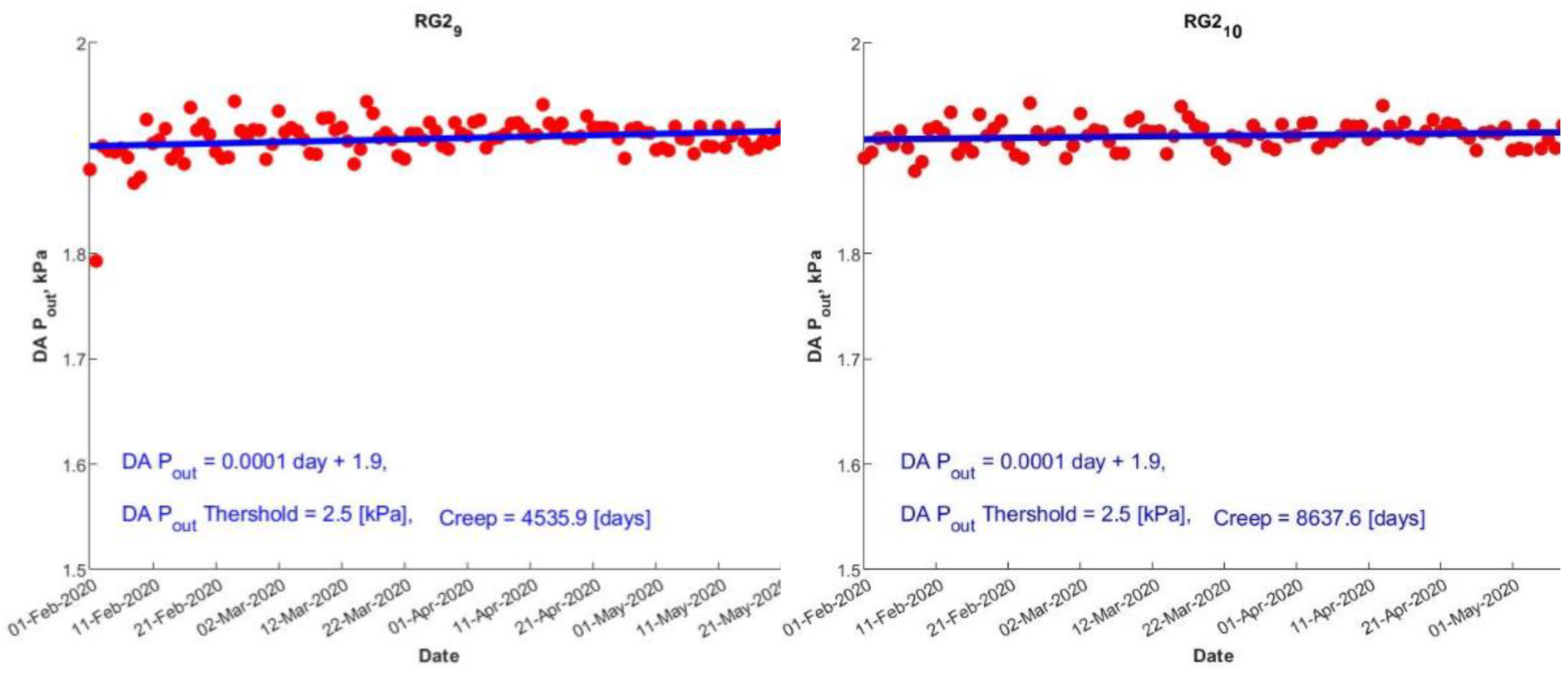
- Input threshold Pout value for creep effect (valve seat damage);
- For each day, compute the average Pout value from 12 am to 3 am;
- Plot the average Pout against time and obtain the best linear fit;
- Using the linear fit, estimate the number of days needed for the current Pout value to reach the threshold Pout value. That was the estimate for the valve seat RUL.
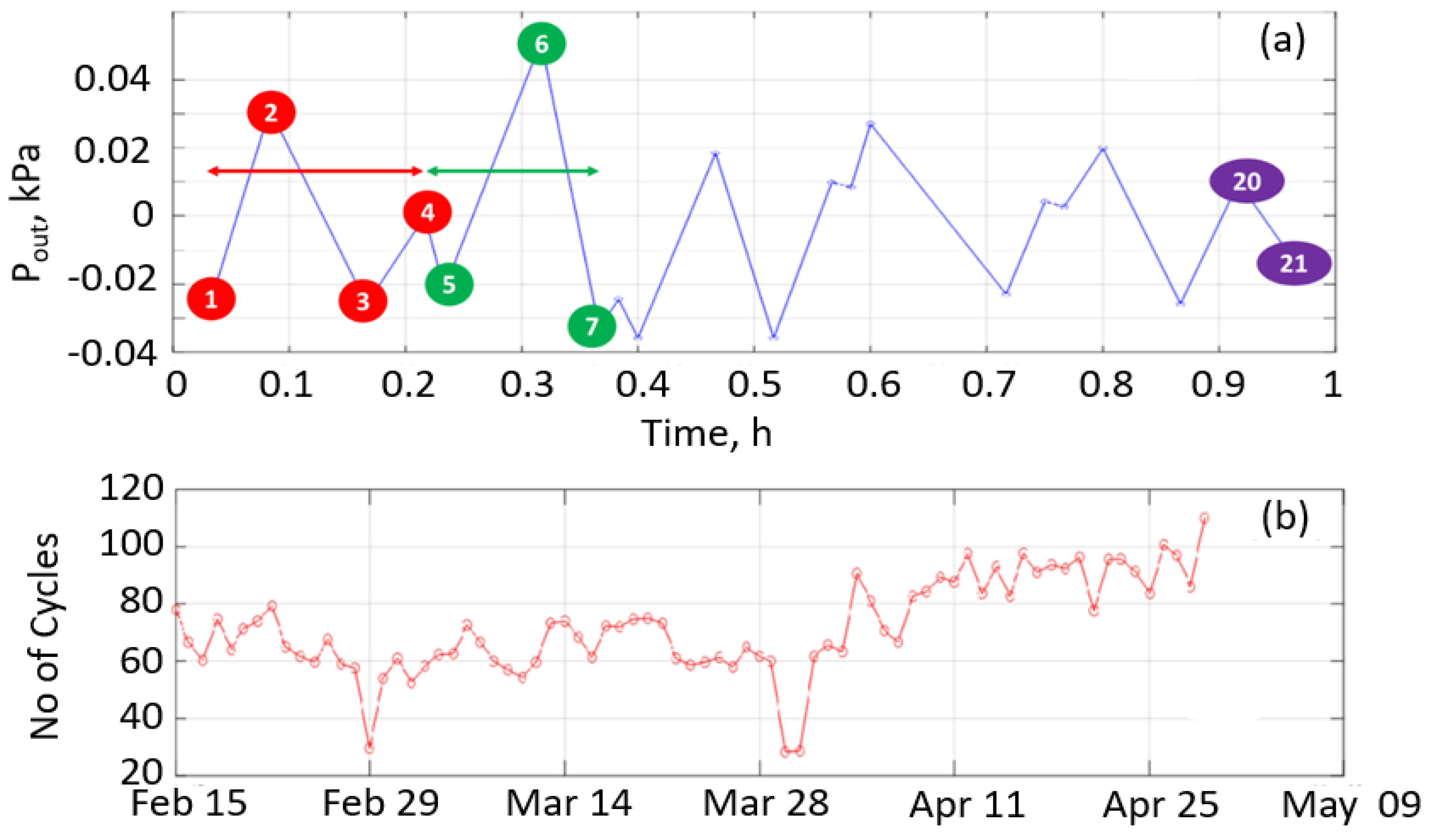
5.4. Diaphragm Malfunction
- Detrend Pout data for each hour (Figure S2 in the Supplementary Materials). For this, the linear best fit was subtracted from the raw data to produce a zero mean for the detrended data;
- Find the local minimum and maximum values (Figure S2 in the Supplementary Materials). The local minimum and maximum values were used to identify the data points at which the diaphragm movement changed from upward to downward or from downward to upward;
- Construct up-down cycles using the local minimum and maximum values (Figure 6a);
- Determine the number of cycles per day using (maximum and minimum values − 1)/3 (Figure 6b);
- Compute percentage deterioration in diaphragm condition over a year using Equation (17).
6. Results and Discussion
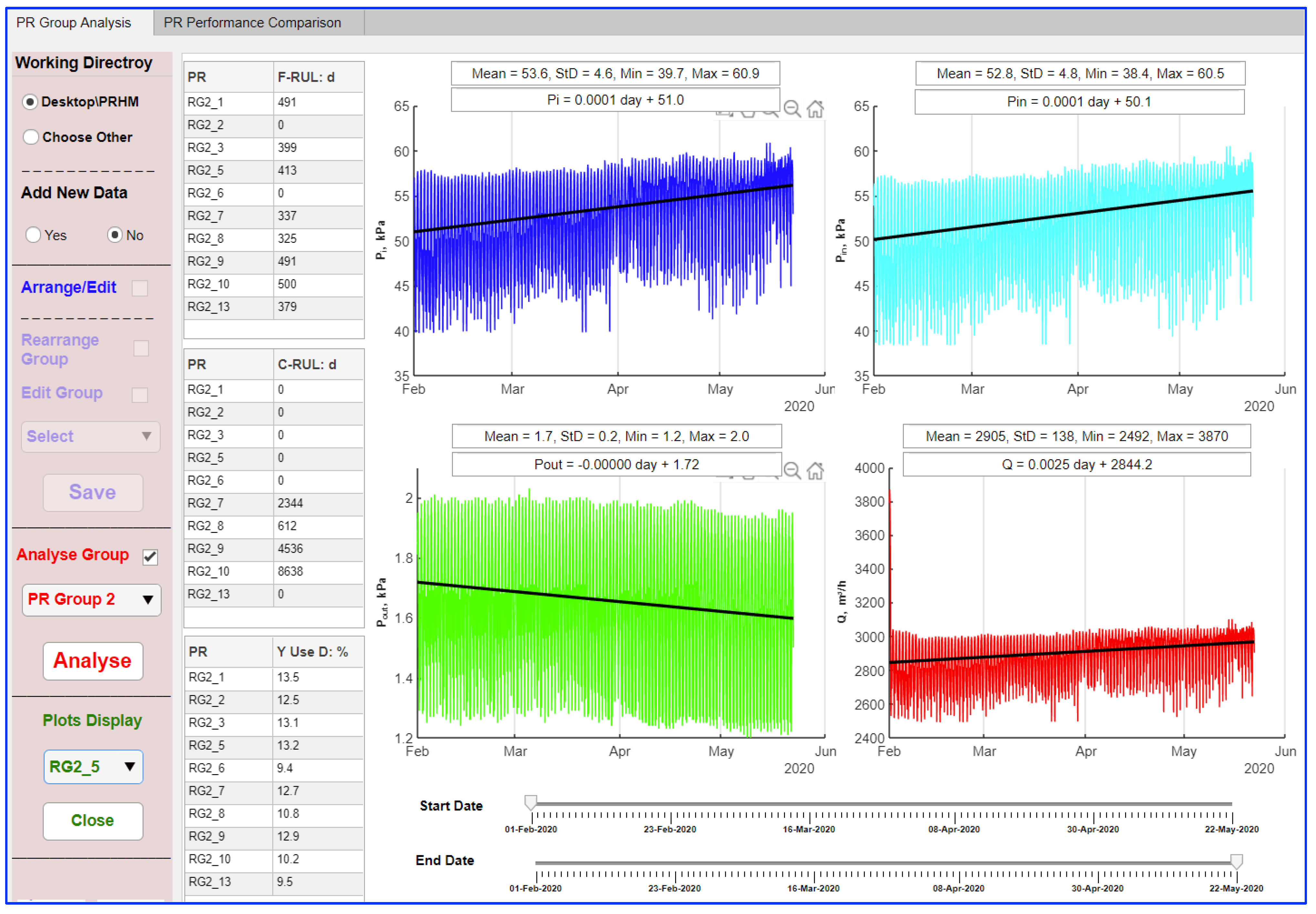
6.1. Pressure Regulator Health Monitor (PRHM) Dashboard
6.2. Filter Choking
6.3. Valve Seat Damage (Creep Effect)
6.4. Diaphragm Malfunction
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Symbols
| AD | Area of diaphragm (m2) |
| AO | Area of plunger (m2) |
| Ap | Peripheral flow area (m2) |
| Cd | Discharge coefficient of orifice |
| d | Diameter of orifice (m) |
| D | Diameter of diaphragm (m) |
| do | Diameter of plunger (m) |
| dt | Diameter of shaft (m) |
| F0 | Initial force on spring (N) |
| K | Spring constant (N/m) |
| L1, L2, M | Lever dimensions (m) |
| mout | Outlet mass flow (kg/s) |
| Patm | Atmospheric pressure (kPa) |
| P0 | Inlet pressure (kPa) |
| Pin | Intermediate pressure (kPa) |
| Pout | Outlet pressure (kPa) |
| Q | Flow (m3/h) |
| R | Gas constant (J/(K.mol)) |
| Tin | Inlet temperature (K) |
| Tout | Outlet temperature (K) |
| WC-Q | Weekly cumulative flow (m3/h) |
| x | Spring extension (m) |
| X | Gas composition |
| y | Plunger displacement (m) |
| ΔPf | Pressure difference across filter (kPa) |
| μ | Joule–Thomson expansion coefficient |
| ρ | Density of gas (kg/m3) |
| γ | Heat capacity ratio of gas |
| θ1, θ2, θd | Angles of lever |
| GUI | Graphical user interface |
| HON | Honeywell |
| M | Model |
| NN | Neural network |
| OF | Objective function |
| P | Pressure |
| PR | Pressure regulator |
| PRHM | Pressure regulator health monitor |
| PRS | Pressure regulating station |
| RMG | Regel and Messtechnik GmbH |
| RUL | Remaining useful life |
| S | Service regulator |
| SN | Number of samples |
| SP | Set point |
| V | Vendor |
References
- Leo, M.B.; Dutta, A.; Farooq, S.; Karimi, I.A. Simulation and health monitoring of a pressure regulating station. Comput. Chem. Eng. 2020, 139, 106824. [Google Scholar] [CrossRef]
- Rao, H.N.; Xiang, L.R.; Karimi, I.A. Modelling pressure regulators using operational data. In Foundations of Computer Aided Process Operations/Chemical Process Control; San Antonio, Texas. 2017. Available online: https://folk.ntnu.no/skoge/prost/proceedings/focapo-cpc-2017/FOCAPO-CPC%202017%20Contributed%20Papers/106_FOCAPO_Contributed.pdf (accessed on 2 April 2021).
- Afshari, H.H.; Zanj, A.; Novinzadeh, A.B. Dynamic analysis of a nonlinear pressure regulator using bondgraph simulation technique. Simul. Model. Pract. Theory 2010, 18, 240–252. [Google Scholar] [CrossRef]
- Dasgupta, K.; Karmakar, R. Modelling and dynamics of single-stage pressure relief valve with directional damping. Simul. Model. Pract. Theory 2002, 10, 51–67. [Google Scholar] [CrossRef]
- Nabi, A.; Dayan, J. Dynamic model for a dome-loaded pressure regulator. J. Dyn. Syst. Meas. Control. Trans. ASME 2000, 122, 290–297. [Google Scholar] [CrossRef]
- Rami, E.G.; Jean-Jacques, B.; Pascal, G.; François, M. Stability study and modelling of a pressure regulating station. Int. J. Press. Vessel. Pip. 2005, 82, 51–60. [Google Scholar] [CrossRef]
- Zafer, N.; Luecke, G.R. Stability of gas pressure regulators. Appl. Math. Model. 2008, 32, 61–82. [Google Scholar] [CrossRef]
- Wang, X.S.; Cheng, Y.H.; Peng, G.Z. Modeling and self-tuning pressure regulator design for pneumatic pressure load systems. Control Eng. Pract. 2007, 15, 1161–1168. [Google Scholar]
- Prescott, S.L.; Ulanicki, B. Dynamic modeling of pressure reducing valves. J. Hydraul. Eng. 2003, 129, 804–812. [Google Scholar]
- Shahani, A.R.; Esmaili, H.; Aryaei, A.; Mohammadi, S.; Najar, M. Dynamic simulation of a high-pressure regulator. JCARME 2011, 1, 17–28. [Google Scholar]
- Ramzan, M.; Maqsood, A. Dynamic modeling and analysis of a high pressure regulator. Math. Probl. Eng. 2016, 2016, 1307181. [Google Scholar] [CrossRef]
- Patil MGand Barjibhe, R.B. Flow analysis of gas pressure regulator by numerical and experimental method. Int. Res. J. Eng. Technol. (IRJET) 2018, 5, 747–752. [Google Scholar]
- Yinxing, D.; Huaixiu, W.; Yahui, W.; Fangwen, C. Research on fault diagnosis algorithm of gas pressure regulator based on compressed sensing theory. In Proceedings of the 2017 29th Chinese Control and Decision Conference, Chongqing, China, 28–30 May 2017. [Google Scholar]
- Yun, A.; Yahui, W.; Yuexiao, L. Research on gas pressure regulator fault diagnosis based on deep confidence network (DBN) Theory. In Proceedings of the 2017 Chinese Automation Congress, Jinan, China, 20–22 October 2017. [Google Scholar]
- Song, Y.; Wang, Y. A fault detection method for gas pressure regulators based on improved dynamic canonical correlation analysis. In Proceedings of the 2021 33rd Chinese Control and Decision Conference, Kunming, China, 22–24 May 2021. [Google Scholar]
- Jia, J.; Wang, B.; Ma, R.; Deng, Z.; Fu, M. State monitoring of gas regulator station based on feature selection of improved grey relational analysis. IEEE Internet Things J. 2022. [Google Scholar] [CrossRef]
- Wang, B.; Jia, J.; Deng, Z.; Fu, M. A state monitoring method of gas regulator station based on evidence theory driven by time-domain information. IEEE Trans. Ind. Electron. 2022, 69, 694–702. [Google Scholar] [CrossRef]
- RMG by Honeywell. Gas Pressure Regulator Technical Datasheet. Available online: https://www.honeywellprocess.com/library/marketing/brochures/HON_280-284%20Brochure.pdf (accessed on 2 April 2021).
- Andersen, B.W. The Analysis and Design of Pneumatic Systems; Wiley: New York, NY, USA, 1967. [Google Scholar]
- Emerson. The Industry Standard for Pressure Regulators. Available online: https://www.emerson.com/documents/automation/catalog-regulators-mini-catalog-fisher-en-125484.pdf (accessed on 15 October 2019).
- Sutar, S.S.; Kunbade, P.R.; Jamadade, S.S. Fatigue life estimation of pressure reducing valve diaphragm. IJEAT 2015, 4, 180–188. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spring-Loaded PR | Lever-Type PR | ||||
|---|---|---|---|---|---|
| 4″ | 3″ | 2″ | 2″ SR | ||
| dt (m) | 0.019 | 0.0141 | 0.0145 | L1 (m) | 0.026 |
| d (m) | 0.0998 | 0.063 | 0.0497 | L2 (m) | 0.095 |
| do (m) | 0.112 | 0.088 | 0.06 | M (m) | 0.042 |
| D (m) | 0.32 | 0.296 | 0.272 | d (m) | 0.032 |
| D (m) | 0.239 | ||||
| Cd | 0.87 | 0.87 | 0.87 | Cd | 0.87 |
| Pout,SP (kPa) | 15 | 15 | 15 | Pout,SP (kPa) | 17 |
| F0 (N) | 120.6 | 103.2 | 87.2 | F0 (N) | 76.3 |
| K (N/m) | 51,000 | 38,800 | 26,200 | K (N/m) | 3,790 |
| PR Name | Filter RUL | Valve Seat RUL | Annual Diaphragm Usage |
|---|---|---|---|
| (d) | (d) | (%) | |
| RG2_1 | 491 | 0 | 13.5 |
| RG2_2 | 0 | 0 | 12.5 |
| RG2_3 | 399 | 0 | 13.1 |
| RG2_5 | 413 | 0 | 13.2 |
| RG2_6 | 0 | 0 | 9.4 |
| RG2_7 | 337 | 2344 | 12.7 |
| RG2_8 | 325 | 612 | 10.8 |
| RG2_9 | 491 | 4536 | 12.9 |
| RG2_10 | 500 | 8638 | 10.2 |
| RG2_13 | 379 | 0 | 9.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.; Karimi, I.A.; Farooq, S.; Samavedham, L.; Srinivasan, R. Health Monitoring of Pressure Regulating Stations in Gas Distribution Networks Using Mathematical Models. Energies 2022, 15, 6264. https://doi.org/10.3390/en15176264
Sharma S, Karimi IA, Farooq S, Samavedham L, Srinivasan R. Health Monitoring of Pressure Regulating Stations in Gas Distribution Networks Using Mathematical Models. Energies. 2022; 15(17):6264. https://doi.org/10.3390/en15176264
Chicago/Turabian StyleSharma, Shivom, Iftekhar A. Karimi, Shamsuzzaman Farooq, Lakshminarayanan Samavedham, and Rajagopalan Srinivasan. 2022. "Health Monitoring of Pressure Regulating Stations in Gas Distribution Networks Using Mathematical Models" Energies 15, no. 17: 6264. https://doi.org/10.3390/en15176264