
The Design and Optimization of Ground-Side Coils for Dynamic Wireless Power Transfer Considering Coupling Variations


Abstract
:1. Introduction
2. System Description and Power Analysis
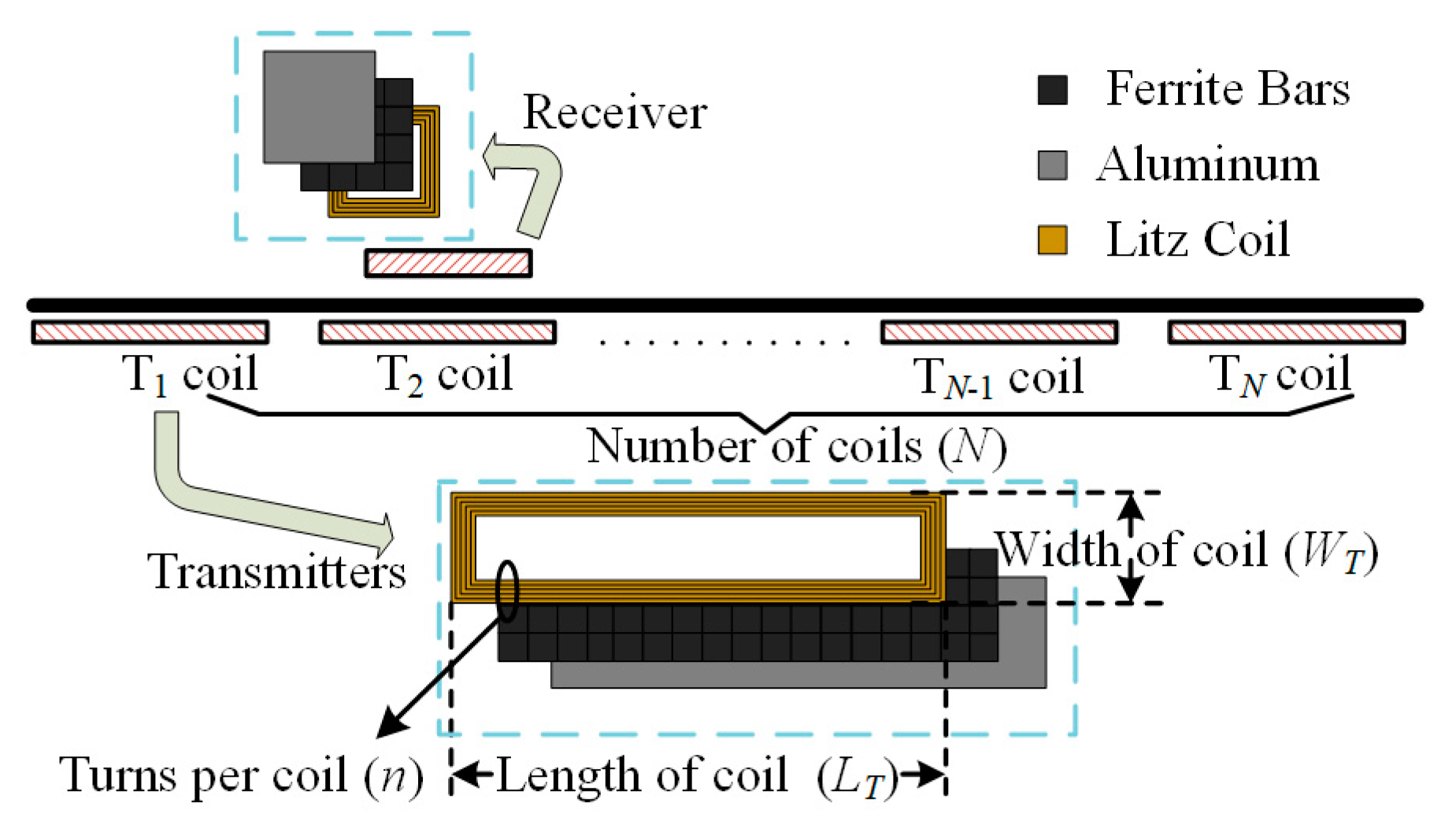
2.1. System Description and Circuit Parameters
2.2. Single-Point Power and Average Power
2.3. Power Loss Modeling
3. Multi-Objective Optimization of Coupler
3.1. Multi-Objective Optimization Process
3.2. Discussion of the Optimization Results
4. Experiment Validation
4.1. Parameters of the Couplers
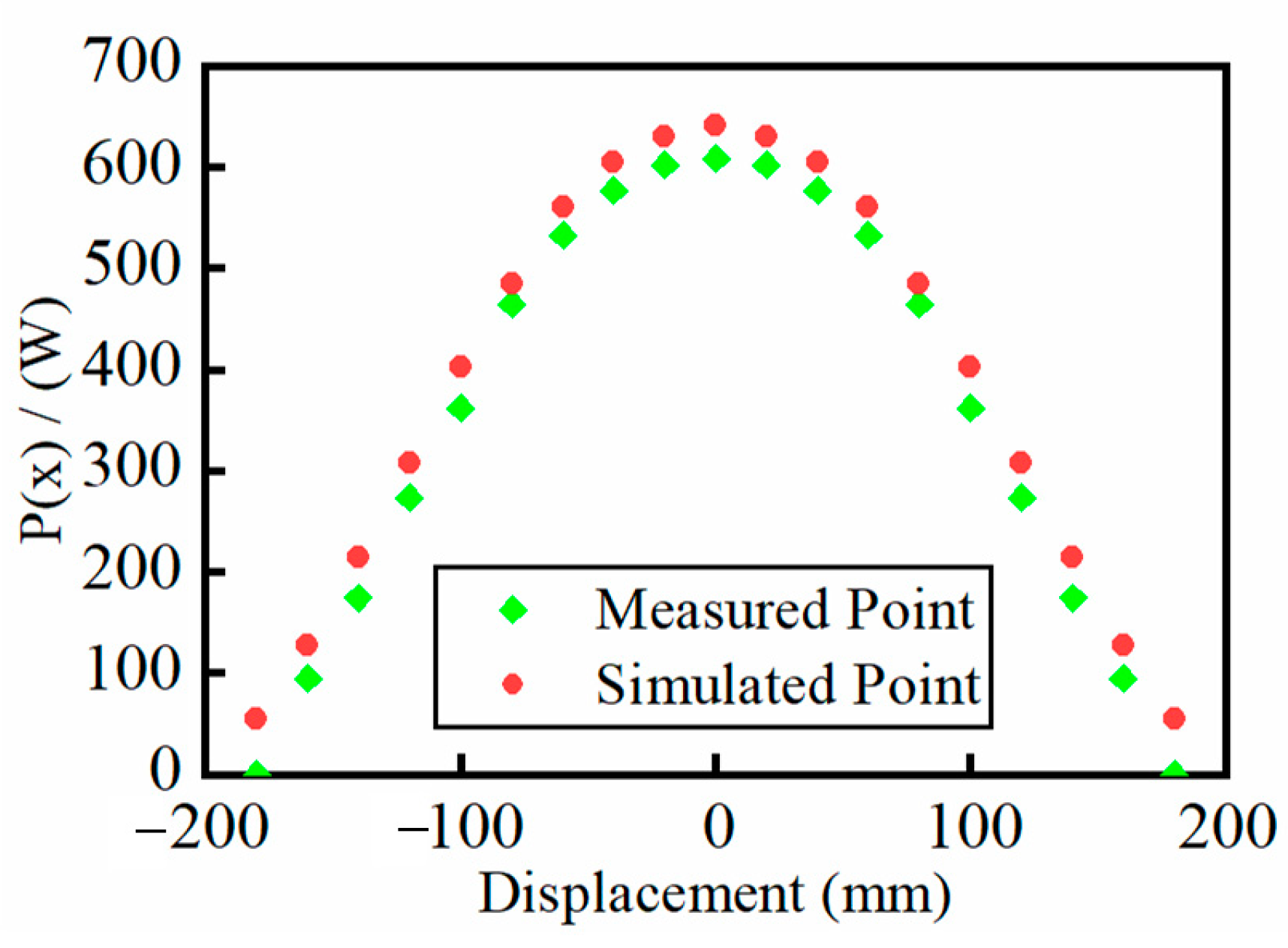
4.2. Waveform and Average Output Power
4.3. Comparisons to Other Solution
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Siqi, L.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar] [CrossRef]
- Bagchi, A.C.; Kamineni, A.; Zane, R.; Carlson, R.B. Review and Comparative Analysis of Topologies and Control Methods in Dynamic Wireless Charging of Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4947–4962. [Google Scholar] [CrossRef]
- Dai, X.; Jiang, J.-C.; Wu, J.-Q. Charging Area Determining and Power Enhancement Method for Multiexcitation Unit Configuration of Wirelessly Dynamic Charging EV System. IEEE Trans. Ind. Electron. 2018, 66, 4086–4096. [Google Scholar] [CrossRef]
- He, H.; Wang, S.; Liu, Y.; Jiang, C.; Wu, X.; Wei, B.; Jiang, B. Maximum Efficiency Tracking for Dynamic WPT System Based on Optimal Input Voltage Matching. IEEE Access 2020, 8, 215224–215234. [Google Scholar] [CrossRef]
- Tan, L.; Zhao, W.; Liu, H.; Li, J.; Huang, X. Design and Optimization of Ground-Side Power Transmitting Coil Parameters for EV Dynamic Wireless Charging System. IEEE Access 2020, 8, 74595–74604. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Venugopal, P.; Dong, J.; Bauer, P. Comparison of Magnetic Couplers for IPT-Based EV Charging Using Multi-Objective Optimization. IEEE Trans. Veh. Technol. 2019, 68, 5416–5429. [Google Scholar] [CrossRef]
- Deng, J.; Zhang, Y.; Wang, S.; Wang, Z.; Yang, Y. The Design and Coupler Optimization of a Single-Transmitter Coupled Multi-Receiver Inductive Power Transfer System for Maglev Trains. IEEE Trans. Transp. Electrif. 2021, 7, 3173–3184. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, X.; Pearce, M.G.S.; Covic, G.A. Multiobjective Optimization of Inductive Power Transfer Double-D Pads for Electric Vehicles. IEEE Trans. Power Electron. 2021, 36, 5135–5146. [Google Scholar] [CrossRef]
- Shi, W.; Dong, J.; Soeiro, T.B.; Riekerk, C.; Grazian, F.; Yu, G.; Bauer, P. Design of a Highly Efficient 20-KW Inductive Power Transfer System With Improved Misalignment Performance. IEEE Trans. Transp. Electrif. 2022, 8, 16. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.-C.; Tse, C.K.; Chen, Q. An Optimized Track Length in Roadway Inductive Power Transfer Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 598–608. [Google Scholar] [CrossRef]
- Zhang, P.; Saeedifard, M.; Onar, O.C.; Yang, Q.; Cai, C. A Field Enhancement Integration Design Featuring Misalignment Tolerance for Wireless EV Charging Using LCL Topology. IEEE Trans. Power Electron. 2021, 36, 3852–3867. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Li, S.; Yu, Y.; Yi, J. Design and Optimization of Asymmetric and Reverse Series Coil Structure for Obtaining Quasi-Constant Mutual Inductance in Dynamic Wireless Charging System for Electric Vehicles. IEEE Trans. Veh. Technol. 2021, 71, 2560–2572. [Google Scholar] [CrossRef]
- Feng, H.; Dayerizadeh, A.; Lukic, S.M. A Coupling-Insensitive X-Type IPT System for High Position Tolerance. IEEE Trans. Ind. Electron. 2021, 68, 6917–6926. [Google Scholar] [CrossRef]
- Feng, H.; Cai, T.; Duan, S.; Zhao, J.; Zhang, X.; Chen, C. An LCC-Compensated Resonant Converter Optimized for Robust Reaction to Large Coupling Variation in Dynamic Wireless Power Transfer. IEEE Trans. Ind. Electron. 2016, 63, 6591–6601. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Z.; Su, H. Passivity-Based PI Control for Receiver Side of Dynamic Wireless Charging System in Electric Vehicles. IEEE Trans. Ind. Electron. 2022, 69, 783–794. [Google Scholar] [CrossRef]
- Petersen, M.; Fuchs, F.W. Load Dependent Power Control in Series-Series Compensated Electric Vehicle Inductive Power Transfer Systems. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, IEEE, Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar]
- Liu, H.; Huang, X.; Tan, L.; Guo, J.; Wang, W.; Yan, C.; Xu, C. Dynamic Wireless Charging for Inspection Robots Based on Decentralized Energy Pickup Structure. IEEE Trans. Ind. Inform. 2018, 14, 1786–1797. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Li, W.; Zhao, H.; Li, S.; Deng, J.; Kan, T.; Mi, C.C. Integrated ${LCC} $ Compensation Topology for Wireless Charger in Electric and Plug-in Electric Vehicles. IEEE Trans. Ind. Electron. 2015, 62, 4215–4225. [Google Scholar] [CrossRef]
- Mills, M.K. Self Inductance Formulas for Multi-Turn Rectangular Loops Used with Vehicle Detectors. In Proceedings of the 33rd IEEE Vehicular Technology Conference, Toronto, ON, Canada, 25–27 May 1983; pp. 65–73. [Google Scholar]
- Lu, F.; Hofmann, H.; Deng, J.; Mi, C. Output Power and Efficiency Sensitivity to Circuit Parameter Variations in Double-Sided LCC-Compensated Wireless Power Transfer System. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 597–601. [Google Scholar]
- Steinmetz, C.P. On the law of hysteresis. Proc. IEEE 1984, 72, 197–221. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Var | Description | Value |
|---|---|---|
| Uin | Transmitter input DC voltage | 100 V |
| Uout | Receiver input DC voltage | 100 V |
| f | DWPT system frequency | 85 kHz |
| α | Air gap | 80 mm |
| Lroad | Length of the supply road | 4000 mm |
| Wrec | Width of the receiver coil | 40 mm |
| Lrec | Length of the receiver coil | 200 mm |
| Vmax | Maximum vehicle speed | 1 m/s |
| Pave_v | Power consumption per kilometer | 250 W |
| Var | Description | Value |
|---|---|---|
| LT | Length of the transmitting coil/mm | [200:40:400] |
| n | Number of turns of transmitting coil | [6:2:12] |
| N | Number of the transmitting coils | [5:1:20] |
| Description | Value |
|---|---|
| Unit price of Litz wire | ¥ 4.5/m |
| Unit price of ferrite | ¥ 4 × 10−4/mm3 |
| Unit price of capacitors(100 nF) | ¥ 40 each |
| Unit price of capacitors(10 nF) | ¥ 13.48 each |
| Unit price of capacitors(1 nF) | ¥ 6.17 each |
| Var | Description | Value |
|---|---|---|
| LT | Length of the transmitting coil/mm | 320 |
| n | Number of turns of transmitting coil | 12 |
| N | Number of the transmitting coils | 9 |
| kmax | Maximum coupling coefficient | 0.173 |
| Pave | Average transfer power | 334 W |
| ƞ | Transfer efficiency | 87.6% |
| S | The total cost | ¥ 3537.1 |
| Var | Description | Value |
|---|---|---|
| L1 | Ground-side inductance | 108 μH |
| L2 | Vehicle-side inductance | 53 μH |
| Lf1, Lf2 | Compensated inductance | 16.86 μH, 16.86 μH |
| C1, C2 | Parallel compensated capacitor | 207.94 nF, 207.94 nF |
| Cf1, Cf2 | Series compensated capacitor | 38.46 nF, 97.01 nF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Deng, J.; Wang, Z.; Wang, S. The Design and Optimization of Ground-Side Coils for Dynamic Wireless Power Transfer Considering Coupling Variations. Energies 2022, 15, 6075. https://doi.org/10.3390/en15166075
Wang W, Deng J, Wang Z, Wang S. The Design and Optimization of Ground-Side Coils for Dynamic Wireless Power Transfer Considering Coupling Variations. Energies. 2022; 15(16):6075. https://doi.org/10.3390/en15166075
Chicago/Turabian StyleWang, Wenbo, Junjun Deng, Zhenpo Wang, and Shuo Wang. 2022. "The Design and Optimization of Ground-Side Coils for Dynamic Wireless Power Transfer Considering Coupling Variations" Energies 15, no. 16: 6075. https://doi.org/10.3390/en15166075