
Well Construction Action Planning and Automation through Finite-Horizon Sequential Decision-Making


Abstract
:1. Background and Introduction
2. Setting up the Planning and Decision-Making Systems for Well Construction Operations
- -
- Objective function, stating the initial and the desired (goal) states, and constraints that can influence decision-making;
- -
- Decision epochs, or the times at which decisions need to be made. Epochs can either be explicitly represented as time intervals, or implicitly represent a sequence of actions in succession;
- -
- State space, to describe all possible situations or scenarios (states) the system can be in, at any given decision epoch;
- -
- Action space, to quantify all possible decisions or actions that can be utilized to manipulate states;
- -
- Plan, or strategy that represents the sequence of actions taken at every successive decision epoch.
2.1. Well Construction Sub-Processes as MDPs
- -
- Formulating an MDP for the operation, which includes appropriately defining state and action spaces
- -
- Defining a goal or a desired state
- -
- Efficient shaping of the reward function
- -
- Setting up an integrated-multi model system replicating the process (environment), i.e., building its digital twin
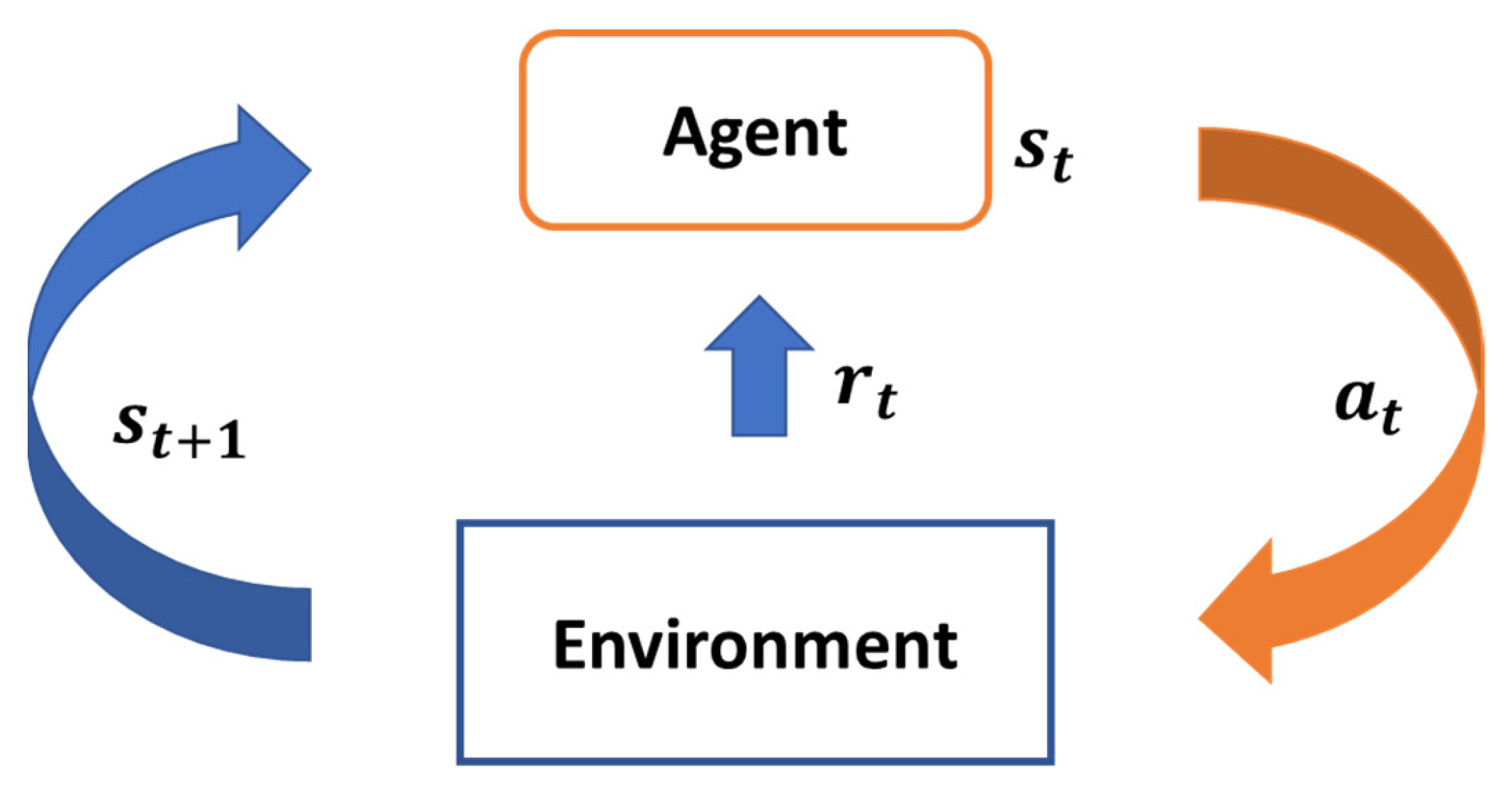
2.1.1. MDP Formulation
- -
- The process should satisfy the Markovian property
- -
- Any state defined for the process should be fully observable
- -
- State space should be finite or countably infinite, with states defined by exhaustively incorporating all relevant parameters
- -
- There is an explicit definition of the action space with appropriately identified control variables
2.1.2. Goal State
2.1.3. Reward Shaping
2.1.4. Digital Twinning the Environment
3. Setting up the Hole Cleaning Decision-Making System
3.1. Formulating the MDP for the Hole Cleaning System
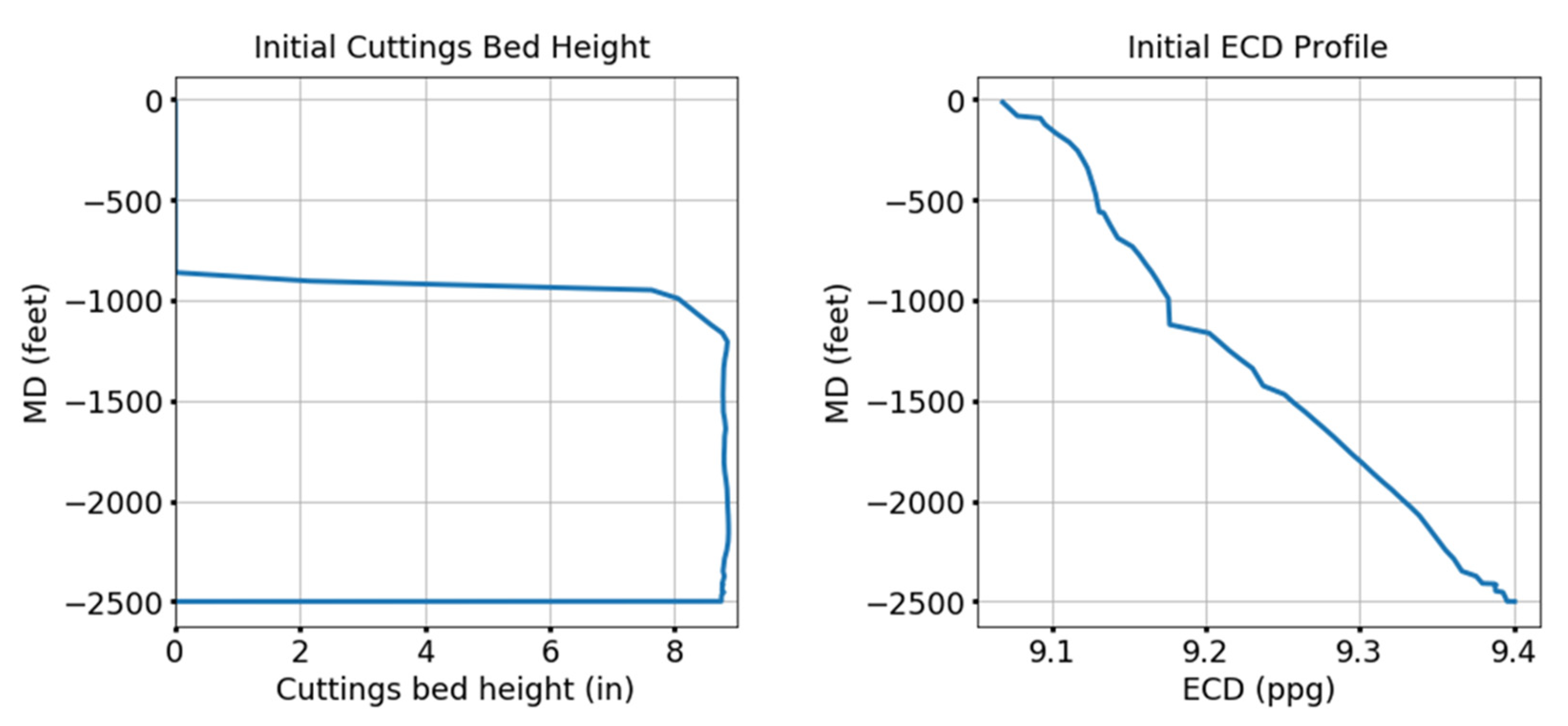
3.1.1. State Space
- -
- Height of the cuttings bed in the curve and the lateral sections of the wellbore;
- -
- ECD along the entire length of the wellbore.
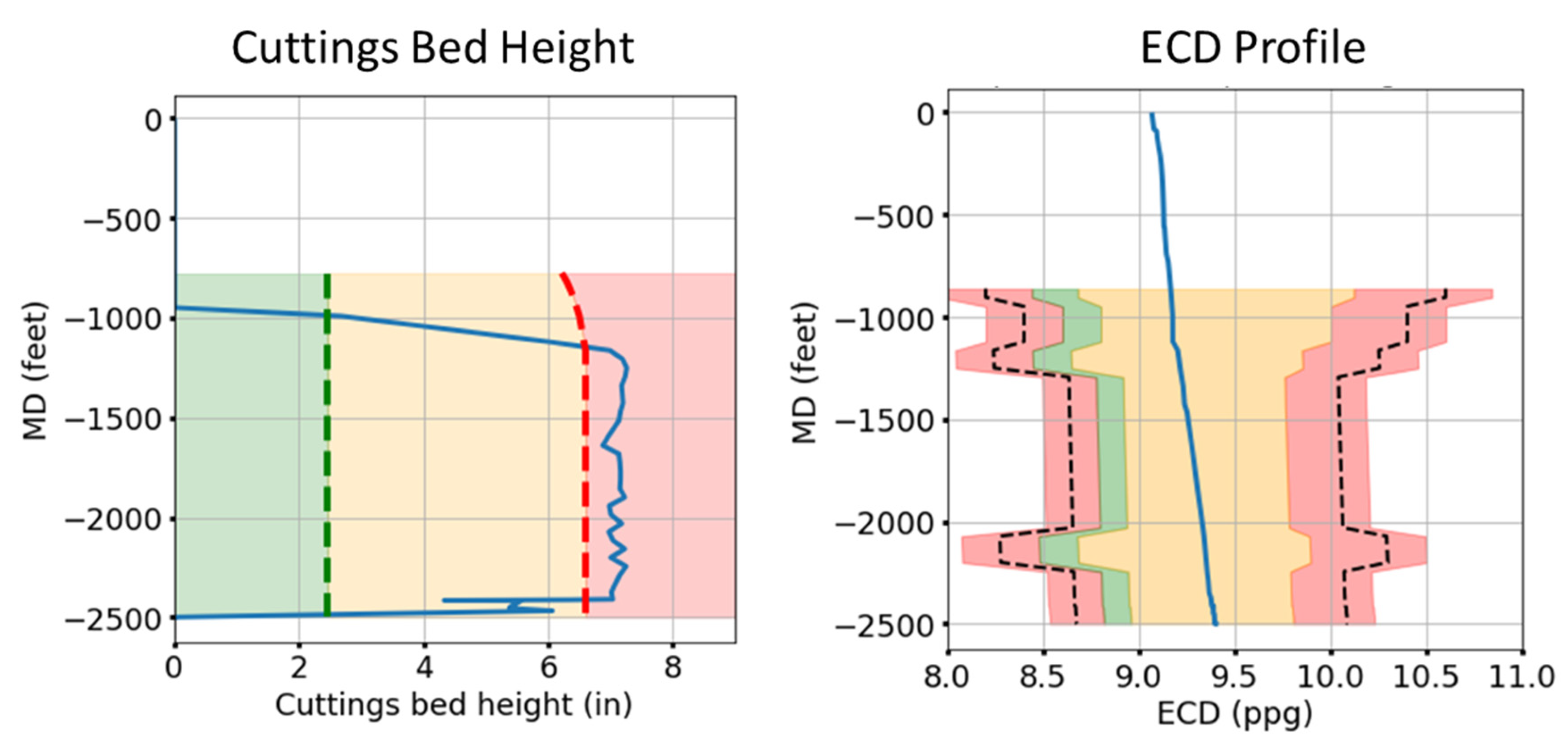
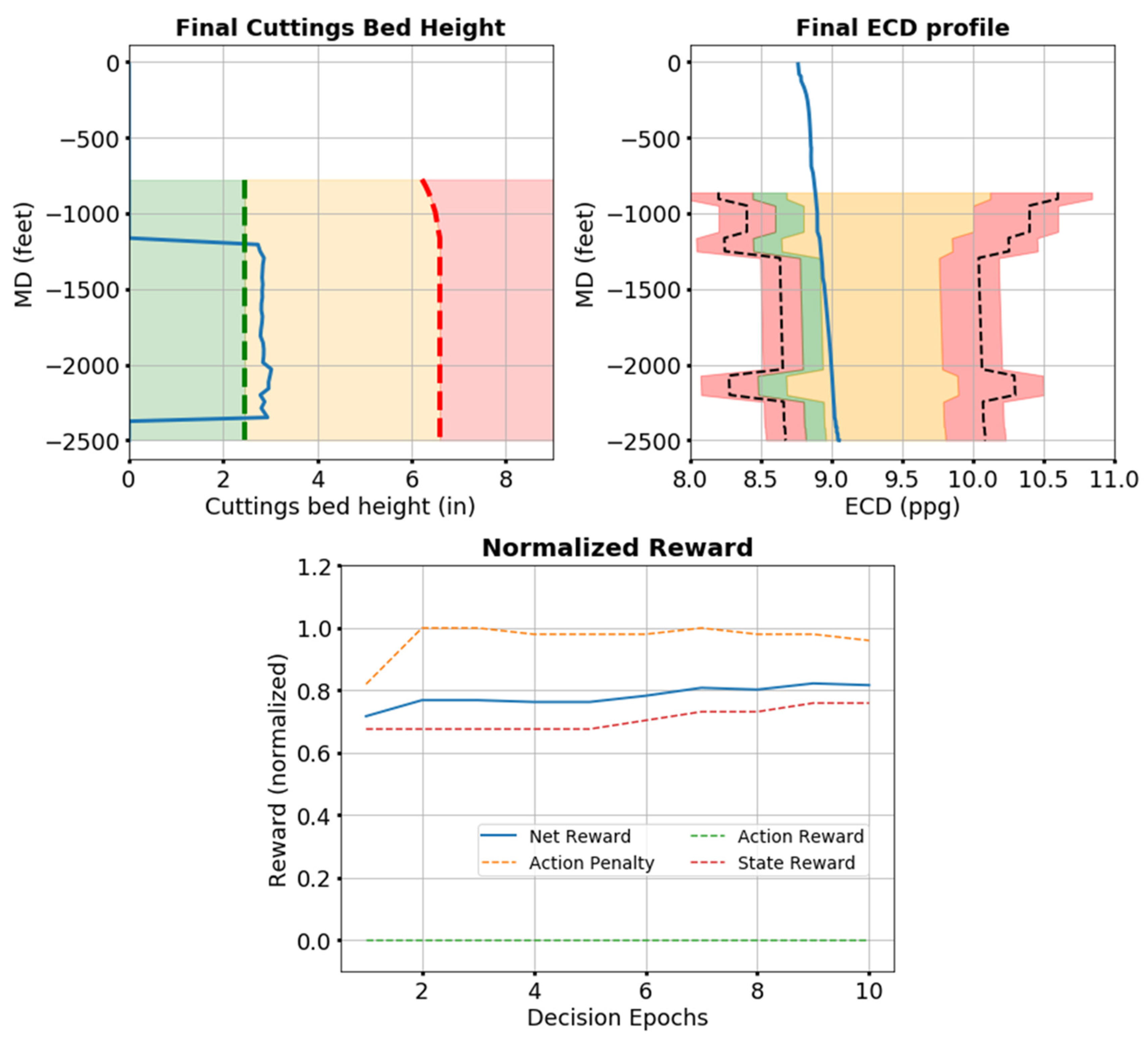
Cuttings Bed Height
ECD
3.1.2. Goal State
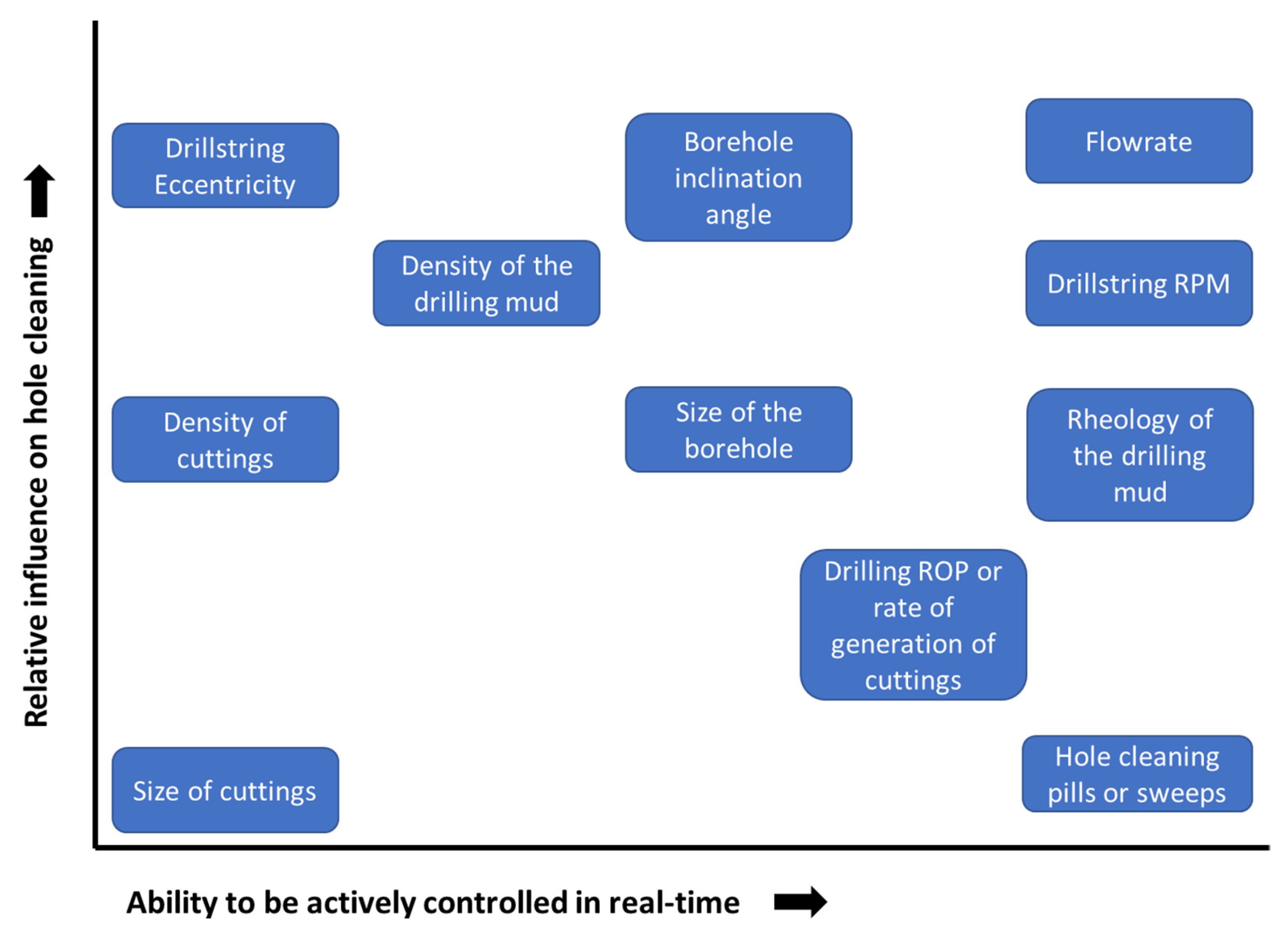
3.1.3. Actions Space
- -
- Drilling mud properties (particularly density and viscosity);
- -
- Cuttings properties (size and density);
- -
- Drilling parameters such as drilling RPM and flow rate;
- -
- Drillstring geometry and its eccentricity in the borehole;
- -
- Rate of cuttings generation (which depends on the drilling rate);
- -
- Borehole geometry (diameters of the open or cased hole sections along the well) and inclination angle.
3.2. Digital Twin of the Environment
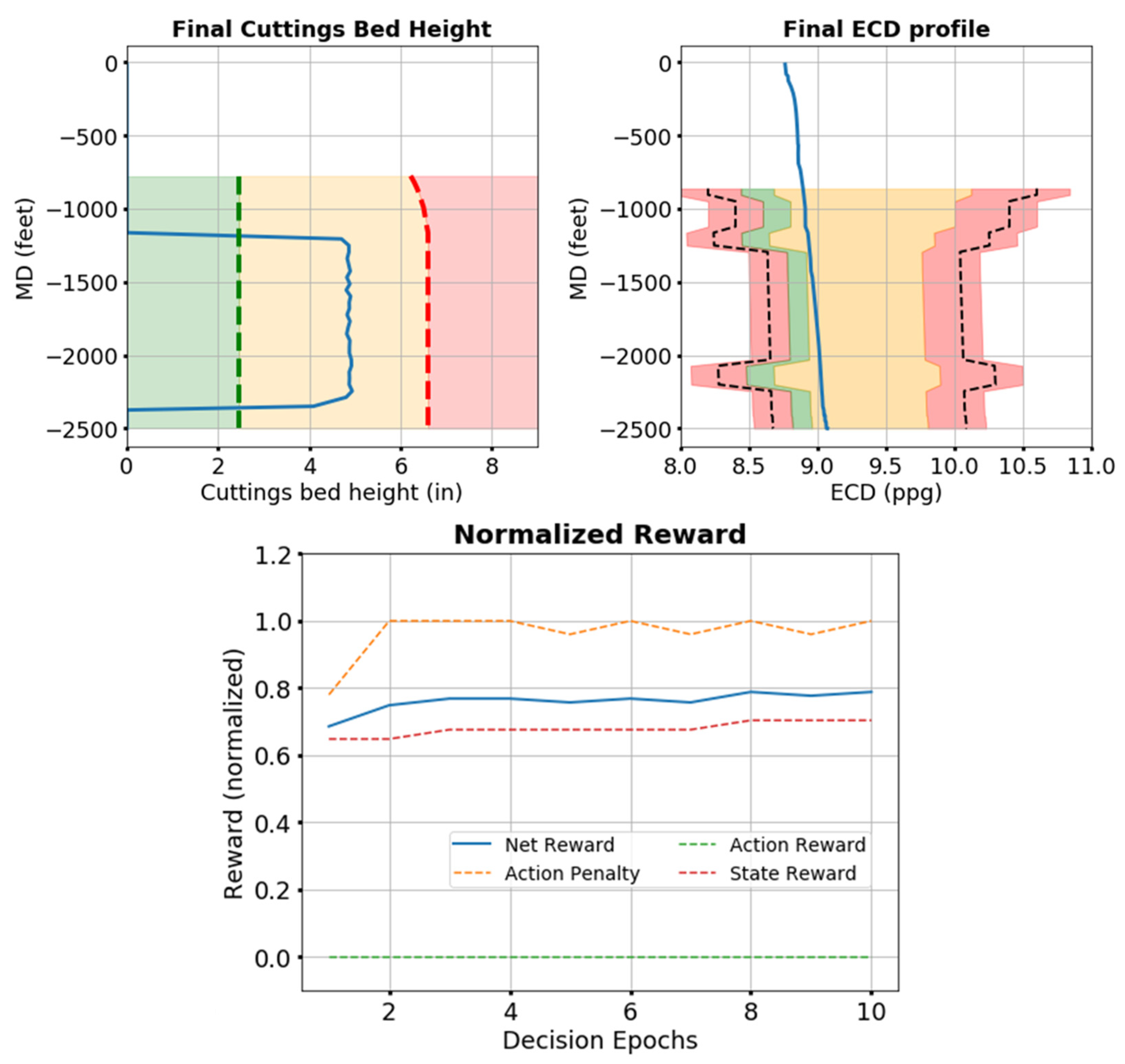
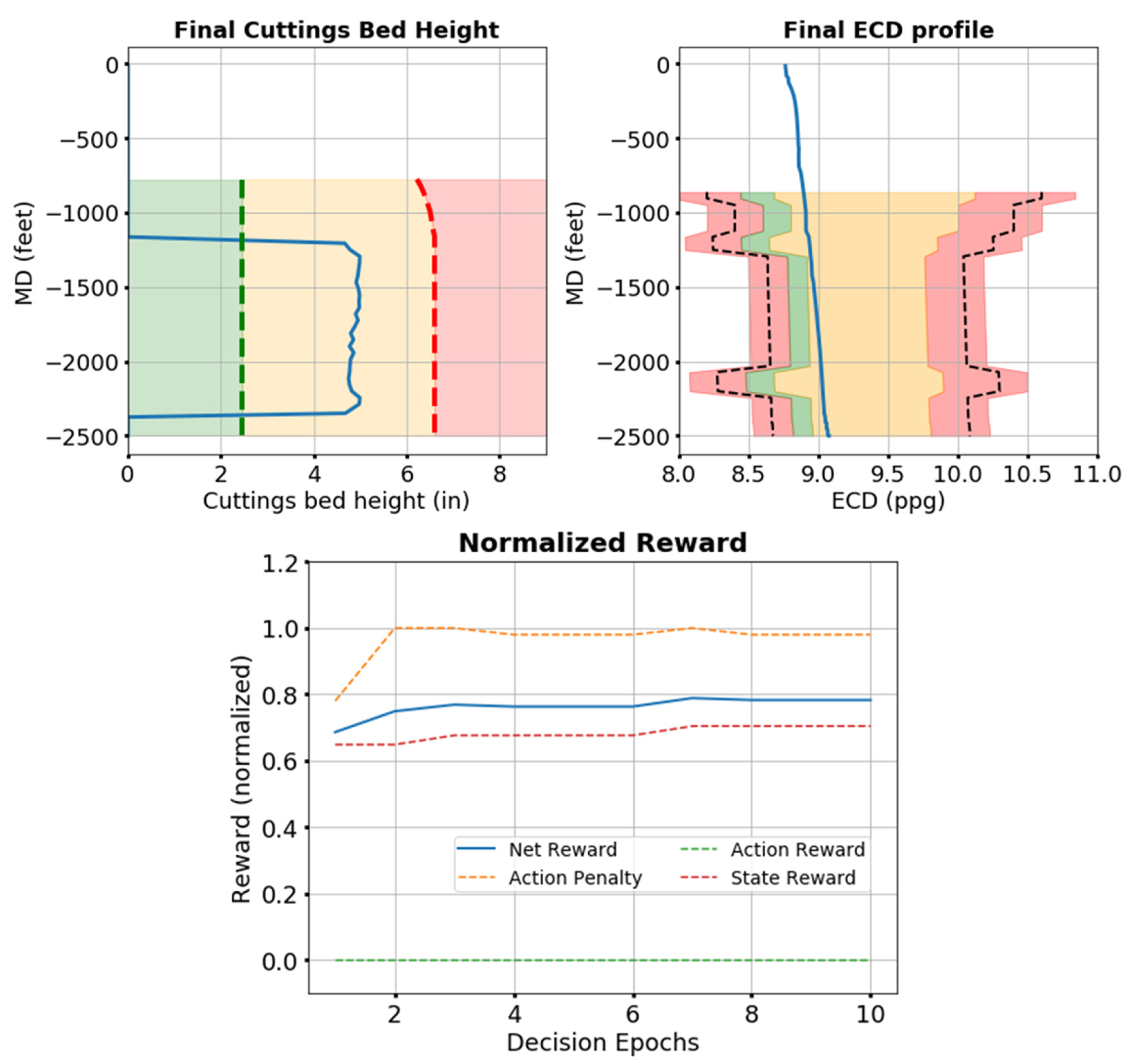
3.3. Reward Function
- -
- Reward associated with state transition;
- -
- Penalty associated with action transition;
- -
- Reward associated with action variables.
3.3.1. Reward Associated with State Transition
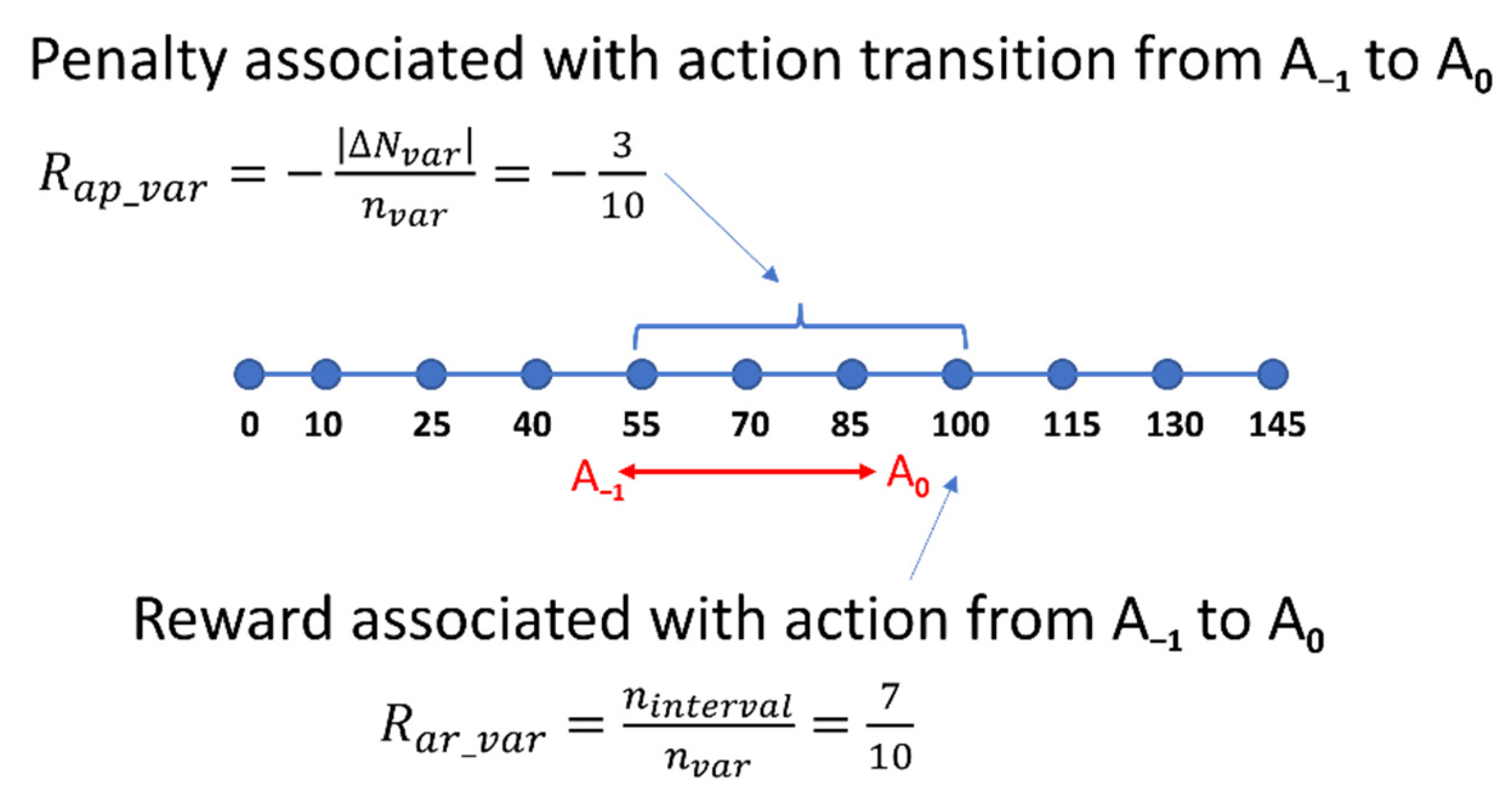
3.3.2. Penalty Associated with Action Transition
- -
- To discourage the system from making extreme changes in actions, unless the reward associated with state transition offsets this penalty;
- -
- Select the least penalizing action in case multiple actions result in the same state transition.
3.3.3. Reward Associated with Action
3.3.4. Calculating the Net Reward
4. Implementation of a System as an MDP
4.1. Well Profile
4.2. Performance Tracking of the System and Summary of Issues
4.3. Basic Action Planning
5. Conclusions
- -
- Discusses the requirements and the steps in setting up such systems (i.e., formulating an MDP, defining the goal state, efficient reward shaping, and digitally twinning the underlying process) by detailing the development of a hole cleaning decision-making system.
- -
- Discusses the importance of reward shaping for well construction operations to ensure frequent and suitable feedback, thereby facilitating effective policy design. It also demonstrates the use of a non-sparse normalized reward function designed for a hole cleaning system for performance tracking and simple action planning.
- -
- Demonstrates the use of digital twinning for simulating various action sequences to track the state evolution and reward progression, thereby allowing ranking of the different sequences based on their long-term returns.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Glossary
| Unit conversion | ||
| 1 m (m) | 3.28 feet (ft) | |
| 1 meter/second (m/s) | 11811 feet/hour (ft/hr.) | |
| 1 psi | 6894.76 Pa | |
| 1 ppg | 119.83 kg/m3 | |
| 1 radian | 57.2958 degrees | |
| 1 ft3 | 0.02832 m3 | |
| 1 GPM | 0.0000631 m3/s | |
| 1 cP | 0.001 Pa·s | |
| 1 lb./100ft2 | 0.4788 Pa | |
| 1 lbs. | 0.4536 Kg | |
| Nomenclature | ||
| Action space | ||
| Action executed by the agent at time | ||
| Outer diameter of the kth control volume segment (inches) | ||
| Total vertical depth (m) | ||
| Equivalent circulation density (pounds per gallon or ppg) | ||
| Absolute ECD value in the kth control volume segment (ppg) | ||
| The average ECD value for an inclination interval (ppg) | ||
| Functional value of ECD in the inclination interval segment | ||
| Fracture gradient (ppg) | ||
| Rate of flow of the drilling mud through the drillstring controlled by a positive displacement reciprocating mud pump on the surface (GPM) | ||
| Gallons per minute | ||
| Acceleration due to gravity (9.81 m/s2) | ||
| Normalized cuttings bed height for an inclination interval | ||
| Functional value of the cuttings bed height in the inclination interval segment | ||
| Absolute cuttings bed height in the kth control volume segment (inches) | ||
| Normalized cuttings bed height in the kth control volume segment | ||
| Inclination angle range (degrees) | ||
| Number of control volume segments within an inclination interval segment | ||
| Number of discrete values possible for a given control variable | ||
| Transition probability set | ||
| Frictional pressure drop in the annulus (Pa) at a measured depth H | ||
| Hydrostatic pressure (Pa) at a vertical depth of TVDH | ||
| Transition probability of a system in the state to the state when an agent executes action | ||
| Plastic viscosity (cP) | ||
| ith parameter component of the state vector | ||
| Goal state value of the ith parameter component of the state vector | ||
| Reward set | ||
| Action transition-based penalty set | ||
| Non-normalized action penalty for the hole cleaning system | ||
| Normalized action penalty for the hole cleaning system | ||
| Action value-based reward set | ||
| Non-normalized action reward for the hole cleaning system | ||
| Normalized action reward for the hole cleaning system | ||
| Net normalized reward function for the hole cleaning system | ||
| State transition-based reward set | ||
| Non-normalized state reward for the hole cleaning system | ||
| Normalized state reward for the hole cleaning system | ||
| Rate of penetration or drilling rate (ft/hr.) | ||
| Drillstring rotation speed (revs. /min) | ||
| Reward received by the system at time | ||
| State space | ||
| Stability limit (ppg) | ||
| Goal or desired state for the hole cleaning system | ||
| State of the system at time | ||
| State of the hole cleaning system at the well TD | ||
| Total depth of the well (feet) | ||
| Time step or decision epoch | ||
| Weight set associated with the action transition penalty | ||
| Weight value associated with the normalized action penalty | ||
| Weight set associated with the action value reward | ||
| Weight value associated with the normalized action reward | ||
| Weight set associated with state transition reward | ||
| Weight value associated with the normalized state reward | ||
| Weight on bit (Klbs.) | ||
| Yield point (lb./100ft2) | ||
| Number of interval changes between consecutive actions | ||
| Difference between the FG and SL of the drilling window (ppg) | ||
| Policy | ||
| Discount factor for return calculation |
References
- Gholami Mayani, M.; Rommetveit, R.; Oedegaard, S.I.; Svendsen, M. Drilling automated realtime monitoring using digital twin. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 12–15 November 2018. [Google Scholar] [CrossRef]
- Chan, H.C.; Lee, M.M.; Saini, G.S.; Pryor, M.; van Oort, E. Development and Validation of a Scenario-Based Drilling Simulator for Training and Evaluating Human Factors. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 327–336. [Google Scholar] [CrossRef]
- Ahmed, O.S.; Aman, B.M.; Zahrani, M.A.; Ajikobi, F.I.; Aramco, S. Stuck Pipe Early Warning System Utilizing Moving Window Machine Learning Approach. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 11–14 November 2019. [Google Scholar] [CrossRef]
- Forshaw, M.; Becker, G.; Jena, S.; Linke, C.; Hummes, O. Automated hole cleaning monitoring: A modern holistic approach for NPT reduction. In Proceedings of the International Petroleum Technology Conference 2020, IPTC 2020, Dammam, Saudi Arabia, 13–15 January 2020. [Google Scholar] [CrossRef]
- Erge, O.; van Oort, E. Time-dependent cuttings transport modeling considering the effects of eccentricity, rotation and partial blockage in wellbore annuli. J. Nat. Gas Sci. Eng. 2020, 82, 103488. [Google Scholar] [CrossRef]
- Kunath, M.; Winkler, H. Integrating the Digital Twin of the manufacturing system into a decision support system for improving the order management process. Procedia CIRP 2018, 72, 225–231. [Google Scholar] [CrossRef]
- Kiran, B.R.; Sobh, I.; Talpaert, V.; Mannion, P.; Al Sallab, A.A.; Yogamani, S.; Pérez, P. Deep reinforcement learning for autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4909–4926. [Google Scholar] [CrossRef]
- Schwarting, W.; Alonso-Mora, J.; Rus, D. Planning and Decision-Making for Autonomous Vehicles. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Kang, D.-J.; Park, J.H.; Yeo, S.-S. Intelligent Decision-Making System with Green Pervasive Computing for Renewable Energy Business in Electricity Markets on Smart Grid. EURASIP J. Wirel. Commun. Netw. 2009, 2009, 1. [Google Scholar] [CrossRef] [Green Version]
- Olaf Blech, J.; Fernando, L.; Foster, K. Towards Decision Support for Smart Energy Systems based on Spatio-temporal Models. arXiv 2017, arXiv:1705.03860. [Google Scholar]
- Silver, D.; Schrittwieser, J.; Simonyan, K.; Antonoglou, I.; Huang, A.; Guez, A.; Hubert, T.; Baker, L.; Lai, M.; Bolton, A.; et al. Mastering the game of Go without human knowledge. Nature 2017, 550, 354–359. [Google Scholar] [CrossRef] [PubMed]
- Silver, D.; Hubert, T.; Schrittwieser, J.; Antonoglou, I.; Lai, M.; Guez, A.; Lanctot, M.; Sifre, L.; Kumaran, D.; Graepel, T.; et al. A general reinforcement learning algorithm that masters chess, shogi, and Go through self-play. Science 2018, 362, 1140–1144. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arulkumaran, K.; Cully, A.; Togelius, J. AlphaStar: An Evolutionary Computation Perspective. In Proceedings of the Genetic and Evolutionary Computation Conference Companion, Prague, Czech Republic, 13–17 July 2019; pp. 314–315. [Google Scholar] [CrossRef] [Green Version]
- OpenAI Five. 2018. Available online: https://openai.com/blog/openai-five/ (accessed on 1 July 2020).
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar] [CrossRef] [Green Version]
- Poole, D.L.; Mackworth, A.K. Artificial Intelligence: Foundations of Computational Agents, 2nd ed.; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Vodopivec, T.; Samothrakis, S.; Ŝter, B. On Monte Carlo Tree Search and Reinforcement Learning. J. Artif. Intell. Res. 2017, 60, 881–936. [Google Scholar] [CrossRef]
- Saini, G.S. Digital Twinning of Well Construction Operations for Improved Decision-Making. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2020. [Google Scholar]
- Silver, D.; Sutton, R.S.; Müller, M. Temporal-difference search in computer Go. Mach. Learn. 2012, 87, 183–219. [Google Scholar] [CrossRef] [Green Version]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; The MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Puterman, M.L. (Ed.) Markov Decision Processes; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1994. [Google Scholar] [CrossRef] [Green Version]
- Cochran, J.J.; Cox, L.A., Jr.; Keskinocak, P.; Kharoufeh, J.P.; Smith, J.C.; Feinberg, E.A. Total Expected Discounted Reward MDPS: Existence of Optimal Policies. In Encyclopedia of Operations Research and Management Science; Cochran, J.J., Cox, L.A., Keskinocak, P., Kharoufeh, J.P., Smith, J.C., Eds.; Wiley: New York, NY, USA, 2011. [Google Scholar] [CrossRef] [Green Version]
- Wiewiora, E. Reward Shaping. In Encyclopedia of Machine Learning and Data Mining; Springer: Berlin/Heidelberg, Germany, 2017; pp. 1104–1106. [Google Scholar] [CrossRef]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Saini, G.S.; Ashok, P.; van Oort, E. Predictive action planning for hole cleaning optimization and stuck pipe prevention using digital twinning and reinforcement learning. In Proceedings of the SPE/IADC Drilling Conference, Houston, TX, USA, 3 March 2020. [Google Scholar] [CrossRef]
- Mitchell, R.F.; Miska, S.Z.; Cunha, J.; Kastor, R.; Aadnoy, B.S.; Eustes, I.A.; Sweatman, R.; Kelessidis, V.C.; Maglione, R.; Ozbayoglu, E.; et al. Fundamentals of Drilling Engineering; Society of Petroleum Engineers: Richardson, TX, USA, 2011. [Google Scholar]
- Bourgoyne, A.T. Applied Drilling Engineering; Society of Petroleum Engineers: Richardson, TX, USA, 1986. [Google Scholar]
- Sanchez, R.A.; Azar, J.J.; Bassal, A.A.; Martins, A.L. The Effect of Drillpipe Rotation on Hole Cleaning During Directional Well Drilling. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 4 April 1997. [Google Scholar] [CrossRef]
- Sifferman, T.R.; Becker, T.E. Hole cleaning in full-scale inclined wellbores. SPE Drill. Eng. 1992, 7, 115–120. [Google Scholar] [CrossRef]
- Baldino, S.; Osgouei, R.E.; Ozbayoglu, E.; Miska, S.; Takach, N.; May, R.; Clapper, D. Cuttings settling and slip velocity evaluation in synthetic drilling fluids. In Proceedings of the Offshore Mediterranean Conference and Exhibition, OMC, Ravenna, Italy, 25 March 2015. [Google Scholar]
- Cayeux, E.; Mesagan, T.; Tanripada, S.; Zidan, M.; Fjelde, K.K. Real-time evaluation of hole-cleaning conditions with a transient cuttings-transport model. SPE Drill. Completion 2014, 29, 5–21. [Google Scholar] [CrossRef]
- Erge, O.; Ozbayoglu, E.M.; Miska, S.Z.; Yu, M.; Takach, N.; Saasen, A.; May, R. The effects of drillstring-eccentricity, -rotation, and -buckling configurations on annular frictional pressure losses while circulating yield-power-law fluids. SPE Drill. Completion 2015, 30, 257–271. [Google Scholar] [CrossRef]
- Gul, S.; van Oort, E.; Mullin, C.; Ladendorf, D. Automated Surface Measurements of Drilling Fluid Properties: Field Application in the Permian Basin. SPE Drill. Completion 2020, 35, 525–534. [Google Scholar] [CrossRef]
- Saasen, A.; Løklingholm, G. The Effect of Drilling Fluid Rheological Properties on Hole Cleaning. In Proceedings of the IADC/SPE Drilling Conference, Dallas, TX, USA, 4 April 2002. [Google Scholar] [CrossRef]
- Nazari, T.; Hareland, G.; Azar, J.J. Review of Cuttings Transport in Directional Well Drilling: Systematic Approach. In Proceedings of the SPE Western Regional Meeting, Anaheim, CA, USA, 27–29 May 2010. [Google Scholar] [CrossRef]
- Karstad, E.; Aadnoy, B.S. Analysis of temperature measurements during drilling. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 5–8 October 1997. [Google Scholar] [CrossRef]
- Bassal, A.A. The Effect of Drillpipe Rotation on Cuttings Transport in Inclined Wellbores. Ph.D. Thesis, University of Tulsa, Tulsa, OK, USA, 1995. [Google Scholar]
- Duan, M.; Miska, S.; Yu, M.; Takach, N.; Ahmed, R.; Zettner, C. Critical conditions for effective sand-sized solids transport in horizontal and high-angle wells. SPE Drill. Completion 2009, 24, 229–238. [Google Scholar] [CrossRef]
- Jalukar, L.S. A Study of Hole Size Effect on Critical and Subcritical Drilling Fluid Velocities in Cuttings Transport for Inclined Wellbores. Ph.D. Thesis, University of Tulsa, Tulsa, OK, USA, 1993. [Google Scholar]
- Larsen, T.I.; Pilehvari, A.A.; Azar, J.J. Development of a new cuttings-transport model for high-angle wellbores including horizontal wells. SPE Drill. Completion 1997, 12, 129–135. [Google Scholar] [CrossRef]
- Larsen, T.I.F. A Study of the Critical Fluid Velocity in Cuttings Transport for Inclined Wellbores. Ph.D. Thesis, University of Tulsa, Tulsa, OK, USA, 1990. [Google Scholar]
- Naganawa, S.; Nomura, T. Simulating transient behavior of cuttings transport over whole trajectory of extended reach well. In Proceedings of the IADC/SPE Asia Pacific Drilling Technology Conference and Exhibition, Bangkok, Thailand, 11–13 October 2006. [Google Scholar] [CrossRef]
- Rubiandini, R.S. Equation for estimating mud minimum rate for cuttings transport in an inclined-until-horizontal well. In Proceedings of the SPE/IADC Middle East Drilling Technology Conference, Abu Dhabi, United Arab Emirates, 8 November 1999. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Reward Function | Values |
|---|---|---|
| Component | No. of Intervals | Reward Function | Values |
|---|---|---|---|
| Inclination Interval | Stability Limit (ppg) | Fracture Gradient (ppg) |
|---|---|---|
| [0, 30)—in casing | 6 | 18 |
| [30, 45) | 8.2 | 10.6 |
| [45, 60) | 8.4 | 10.4 |
| [60, 75) | 8.2 | 10.2 |
| [75+) | 8.6 | 10.0 |
| Control Variable | Number of Discrete Values | Range of Values |
|---|---|---|
| Flow Rate (GPM) | 10 | [0, 1500] |
| Drilling ROP (ft/h) | 10 | [0, 900] |
| Drillstring RPM (rev/min) | 10 | [0, 150] |
| Mud Density (ppg) | 5 | [8.5, 9.7] |
| Mud Plastic Viscosity (cP) | 5 | [7, 42] |
| Mud Yield Point (lb./100ft2) | 5 | [7, 42] |
| Drilling | Circulation |
| Action Sequence | Net Reward | Final State Reward |
|---|---|---|
| 0 (Original) | 0.68 | 0.59 |
| 1 | 0.76 | 0.68 |
| 2 | 0.77 | 0.69 |
| 3 | 0.79 | 0.70 |
| 4 | 0.79 | 0.70 |
| 5 | 0.82 | 0.76 |
| 6 | 0.86 | 0.81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saini, G.S.; Erge, O.; Ashok, P.; van Oort, E. Well Construction Action Planning and Automation through Finite-Horizon Sequential Decision-Making. Energies 2022, 15, 5776. https://doi.org/10.3390/en15165776
Saini GS, Erge O, Ashok P, van Oort E. Well Construction Action Planning and Automation through Finite-Horizon Sequential Decision-Making. Energies. 2022; 15(16):5776. https://doi.org/10.3390/en15165776
Chicago/Turabian StyleSaini, Gurtej Singh, Oney Erge, Pradeepkumar Ashok, and Eric van Oort. 2022. "Well Construction Action Planning and Automation through Finite-Horizon Sequential Decision-Making" Energies 15, no. 16: 5776. https://doi.org/10.3390/en15165776