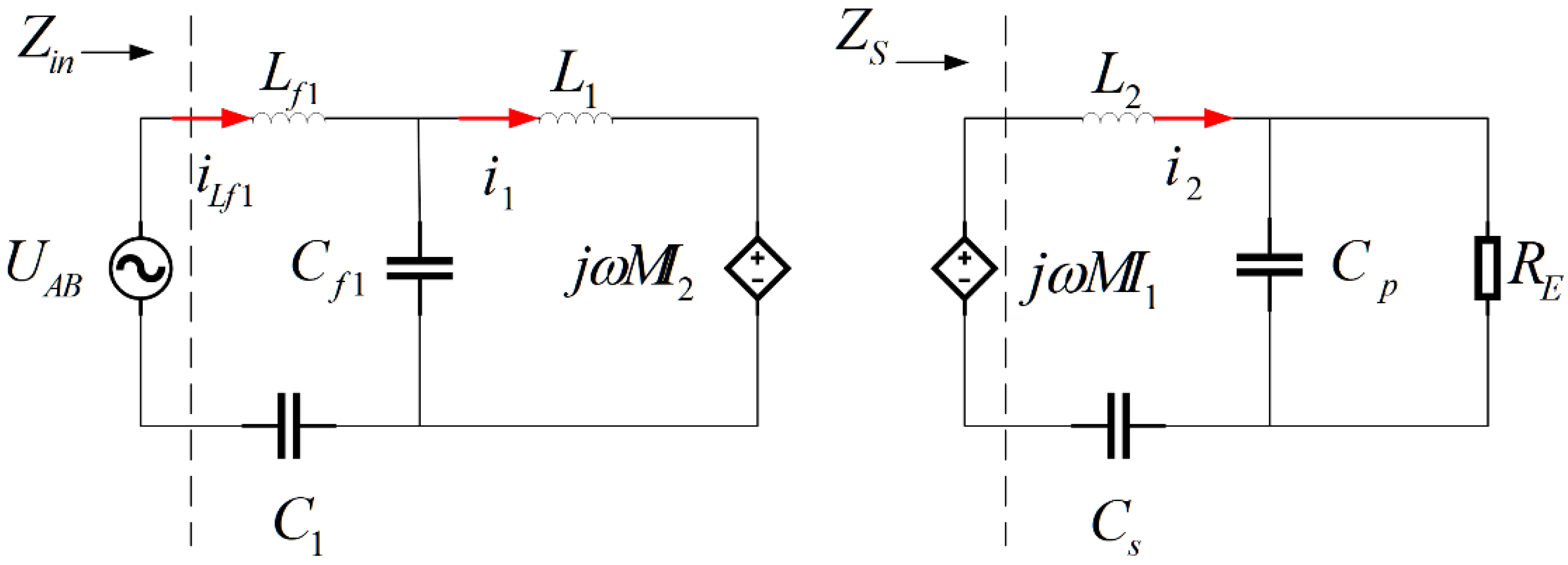
As shown in
Figure 1, the primary side of the power factor self-tuning LCC/SP wireless charging system is composed of a DC source
connected through a DC bus capacitor
, and a full-bridge inverter is formed through
, which is used as an AC excitation source.
and
are used for the self-inductance of the primary- and secondary-side coils, respectively, and
is the mutual inductance of the coil. The secondary side uses two diodes,
and
, and two freewheeling inductors,
and
, to form a current-doubling rectifier circuit in parallel with a filter capacitor
, which is transmitted to the load, where
is a resistive load.
2.2. Basic Characteristics of the Mistuned LCC/SP Compensation Topology
The input transmitter impedance defining the system consists of the real part
and the imaginary part
:
When the coil group parameters change and the system enters a non-resonant state, the initially calculated compensation parameters will no longer match, and the input impedance will also change from pure resistance. In order to describe the influence of the change in impedance,
, input into the transmitter on the active and reactive power of the system, the active power coefficient
and reactive power coefficient
are defined as:
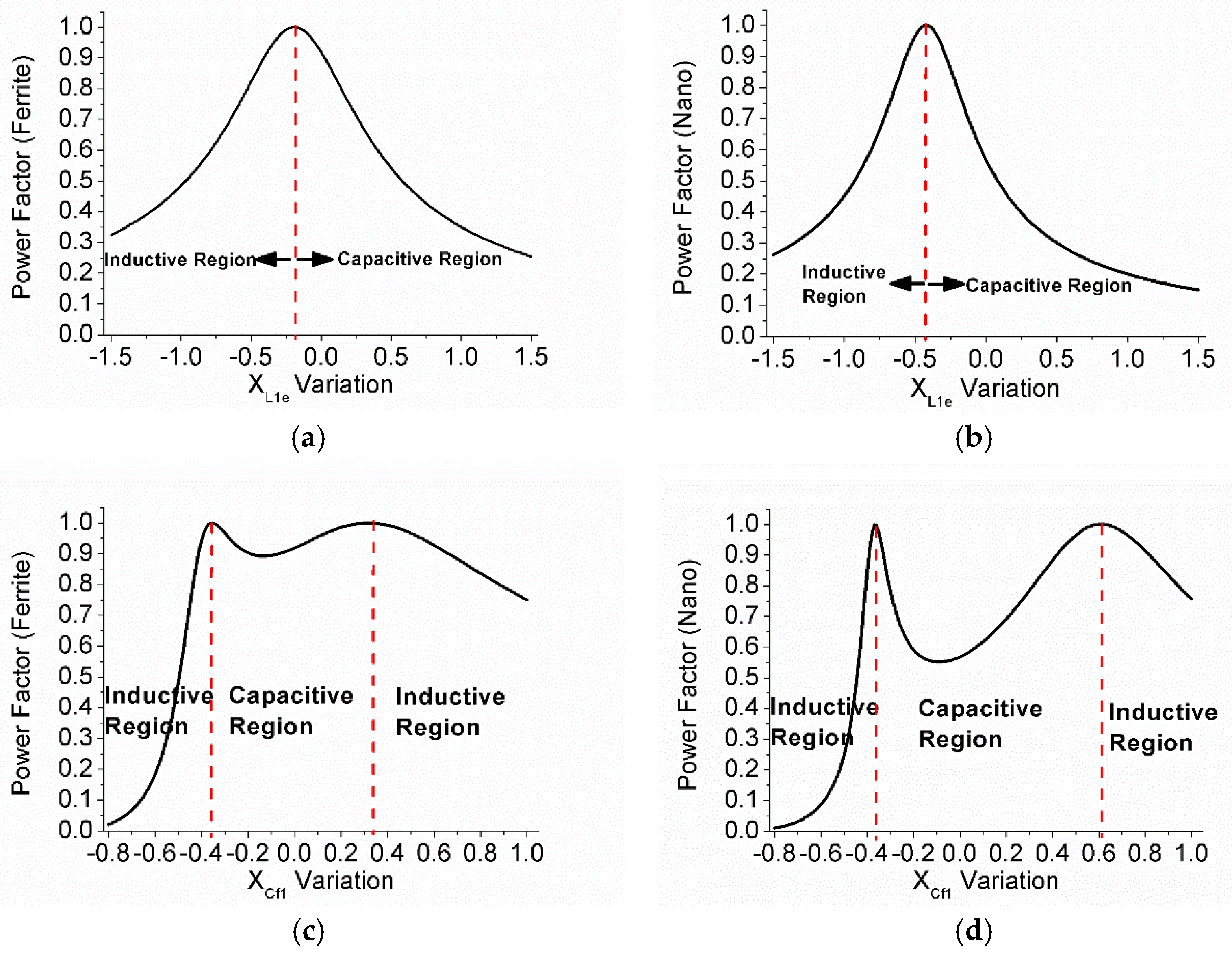
The Power Factor
is defined as the ratio of the active output power to the input apparent power, which is used to describe the functional output conversion capability of the system.
When the resonant is one, all the apparent input power is converted into active power output. In the case of non-resonance, one part of the input impedance is imaginary, which necessitates the input of additional reactive power into the resonant tank, and the will be less than one. The smaller the , the more significant the proportion of reactive power, which will affect the active output power of the system and increase the heat loss of parasitic resistors in the circuit. If the system is adjusted to work in the high power factor range, its efficiency will be improved. The low power factor will significantly increase the stress on the device’s topology, necessitating a study of how to improve the system’s power factor.
In wireless charging systems in electric vehicles, the horizontal dislocation caused by manual parking is unavoidable. However, the horizontal dislocation between the transmitting and receiving coils will cause the
,
, and
to deviate from their initial values. In the wireless energy transmission test bench, when testing the transmission performances of different coil structures or magnetic shielding materials, the self-inductance and mutual inductance of the coil will obviously change. Therefore, in order to study the influence of a change in coil self-inductance and mutual inductance on the resonant state of the system, the self-inductance changes and mutual inductance changes,
,
, and
, of the transmitting and receiving coils are defined as follows, in which
,
, and
represent the initially designed resonant values, and
,
, and
represent the actual self-inductance and mutual inductance values after the resonant parameters of the system are changed.
When the parameters of the coil group are considered, the expressions of the equivalent impedance of the receiver and the equivalent input impedance of the transmitter at the resonant operating frequency are as follows:
For normalization, we define the ratios
and
between the self-inductance change and the initial value; the ratio of the mutual inductance change and the initial value
; the ratio of the operating frequency to the resonant frequency
; the equivalent impedance mode of the transmitting coil
; the ratio of the equivalent impedance mode of the transmitting coil to the equivalent load resistance
; the ratio of the self-inductance of the secondary side to the primary coil
; the ratio of the primary series’ compensation inductance to the self-inductance of the same side coil
; the ratio of the secondary side’s equivalent series compensation inductance to the self-inductance of the same side coil
; and the ratio of the self-inductance of the primary coil
, which is
By substituting the resonance condition (4) and the normalized Equation (13) into the input impedance Equation (12), the equivalent normalized receiver impedance
and transmitter impedance
, which take into account the variation in coil parameters, can be obtained:
To simplify our analysis of the system’s properties, the real part of the normalized input impedance (which takes into account the variation in coil parameters) is defined as
, and the imaginary part is defined as
; then, the equivalent normalized input impedance that takes into account the variation in coil parameters can be expressed as:
The real part
and imaginary part
can be expressed as Equations (16) and (17):
The equivalent normalized input impedance Equation (14), which considers the variation in the coil parameters, is substituted into the power factor Equation (10) to obtain the equivalent normalized power factor
, which considers the variation in the coil parameters, as shown in Equation (18):
This expression is relatively complex; in the simplified form, we derive
when the self-inductance of the secondary coil is constant, and
when the self-inductance of the primary coil is constant, as shown in Equations (19) and (20), respectively.
According to the above Equations (19) and (20), taking the circuit system in this paper as an example (the design parameters of which are shown in
Table 2), the change in power factor on the input side of the system can be analyzed, considering coil self-inductance and mutual inductance changes of
and
, respectively.
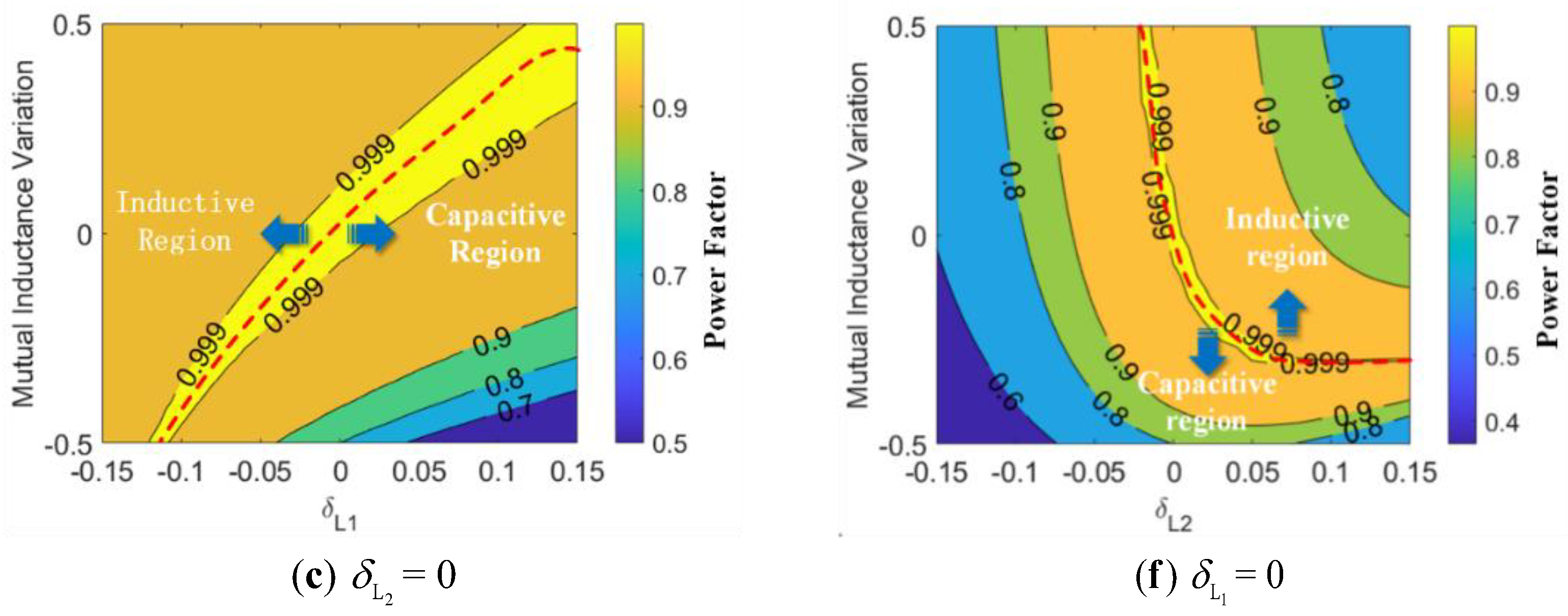
When the self-inductance of the secondary coil
is
(shown in
Figure 3a) and the mutual inductance increases, the system changes to become inductive, and with an enhancement in the mutual inductance, the influence of this mutual inductance on the system’s properties gradually becomes less than that of the primary coil’s self-inductance. When the system enters the capacitive interval, the power factor clearly decreases with the change in
. When the mutual inductance of the system is reduced, the system becomes capacitive, but the mutual inductance maintains a significant influence on the power factor of the system. When
(shown in
Figure 3b), the whole system resides in the capacitive interval, and when the mutual inductance is
, it does not affect the capacitive properties of the system. Therefore, when designing the resonant parameters of the coil and the system, the self-inductance of the secondary coil should not be allowed to fall into this range; however, the system still becomes increasingly capacitive with increases in the mutual inductance, and with an increase in
, the power factor clearly decreases. When
(as shown in
Figure 3c) and the mutual inductance of the system increases, the system enters the inductive region. When the mutual inductance is reduced, the system becomes capacitive, and with increases in the self-inductance of the primary coil, the system becomes more capacitive.
In summary, when the is constant, the increase in mutual inductance enables the system to work in the inductive range, and a reduction in the self-inductance of the primary coil will lead to a reduction in the power factor of the system, which will cause it to operate in the capacitive range.
When the change in the self-inductance of the primary coil
is
(shown in
Figure 3d) and the mutual inductance is increasing, the influence of the change in secondary self-inductance on the properties of the system is greater than that of the mutual inductance. At this time, with the increase in its secondary self-inductance, the system tends to become inductive, and when the secondary self-inductance decreases, the system tends to become capacitive, with no apparent change in mutual inductance. When the system’s mutual inductance decreases, its influence gradually becomes dominant, and the secondary self-inductance decreases gradually. When the mutual inductance increases, the system tends to become inductive, and when the mutual inductance decreases, the system tends to become capacitive, with the influence of secondary self-inductance being relatively very small. When
(shown in
Figure 3f), it shows the same change trend as
Figure 3d. When
(shown in
Figure 3e), the mutual inductance does not affect the properties of the system when it is within the
interval. At this time, the nature of the system tends to become sensitive to an increase in the secondary coil’s self-inductance, while it tends to become capacitive when the secondary coil’s self-inductance decreases.
In conclusion, when the mutual inductance of the system increases, the equivalent input impedance of the detuned LCC/SP topology shifts into the inductive interval, but the degree of change will be affected by the change in the self-inductance of the secondary coil. When the self-inductance of the secondary coil begins to decrease, the influence of the mutual inductance will be weakened, and the self-inductance of the secondary coil will come to occupy the dominant. When the self-inductance of the secondary coil begins to increase, the influence of mutual inductance will gradually increase, and the effect of the change in the self-inductance of the primary coil will be almost the same as that of mutual inductance. When the inductance of the primary coil increases, the system becomes capacitive, while when the primary coil enters a decreasing state, the system becomes inductive. According to a comparison between
Figure 3c,f, when the mutual inductance of the system is low, it is more likely to fall into the capacitive range, resulting in the induction of poor working conditions for the switch tube. When the mutual inductance is near the desired value or higher, a change in the self-inductance
of the secondary coil will more readily affect the power factor of the system, causing the system to fall into the capacitive range. This suggests that in terms of coil design, in order to ensure dislocation, a change in the secondary’s coil self-inductance will be more effective; the primary design will be more accessible, but the secondary design requirements will be more stringent.
According to our analysis of the LCC/SP detuning circuit model, changes in the self-inductance and mutual inductance of the coil will have a significant impact on the power factor of the system, so it is considered necessary to introduce variable resonant matching components to ensure that the system will still work in the high power factor range during dislocation or when magnetic shielding materials are present.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















