
Energy Management and Voltage Control in Microgrids Using Artificial Neural Networks, PID, and Fuzzy Logic Controllers



Abstract
:1. Introduction
- Voltage and frequency profiles are regulated in both islanded and networked operation modes;
- Grid synchronization with the main grid;
- MG’s entire energy management system is optimized;
- As much as feasible, cut the MG’s operational costs.
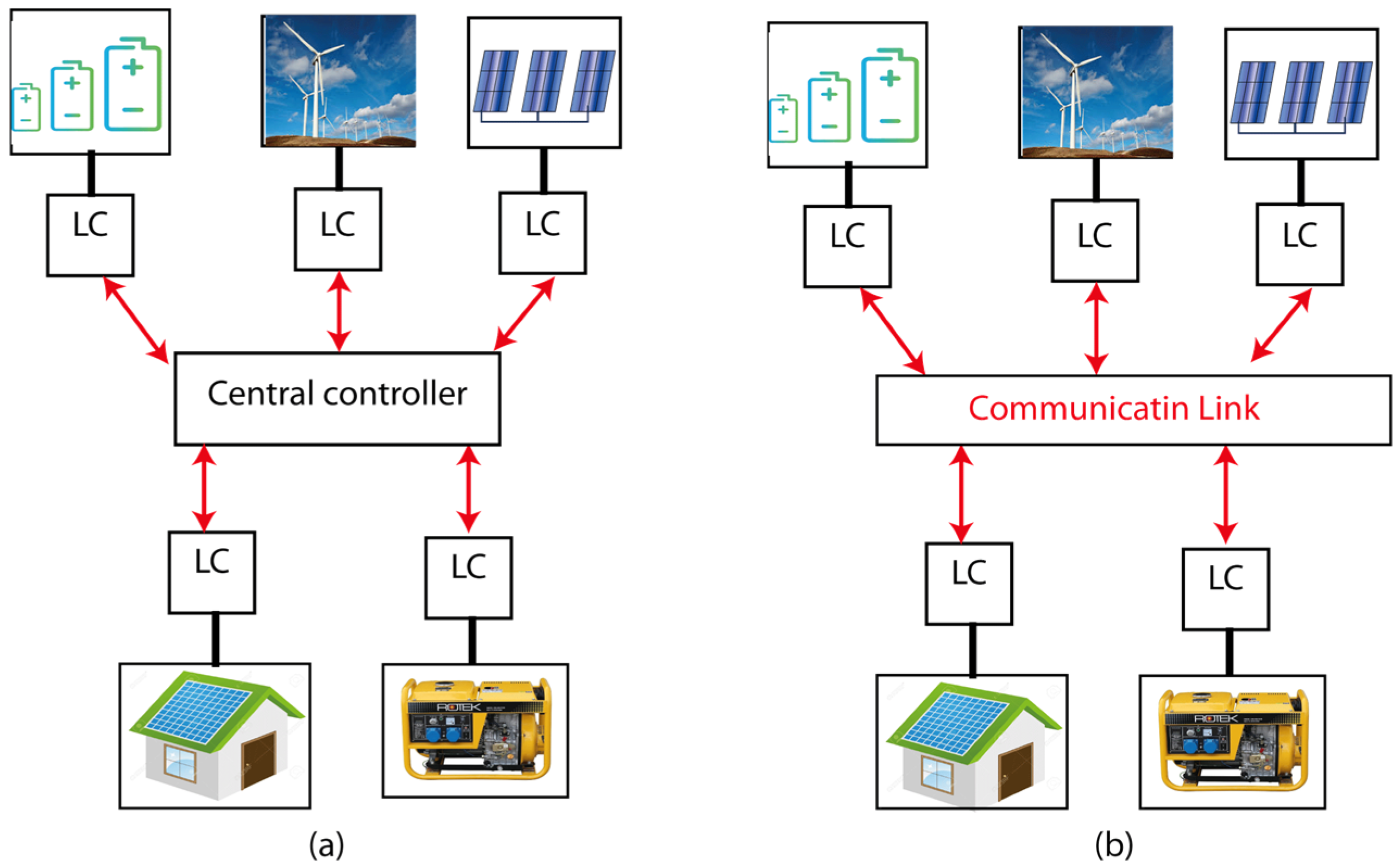
2. Overview of Local Control in Microgrids
2.1. Proportional–Integral–Derivative (PID) Technique
2.2. Neural Networks for Microgrid Control
2.3. Fuzzy Logic in Power Systems
3. Microgrid Modeling
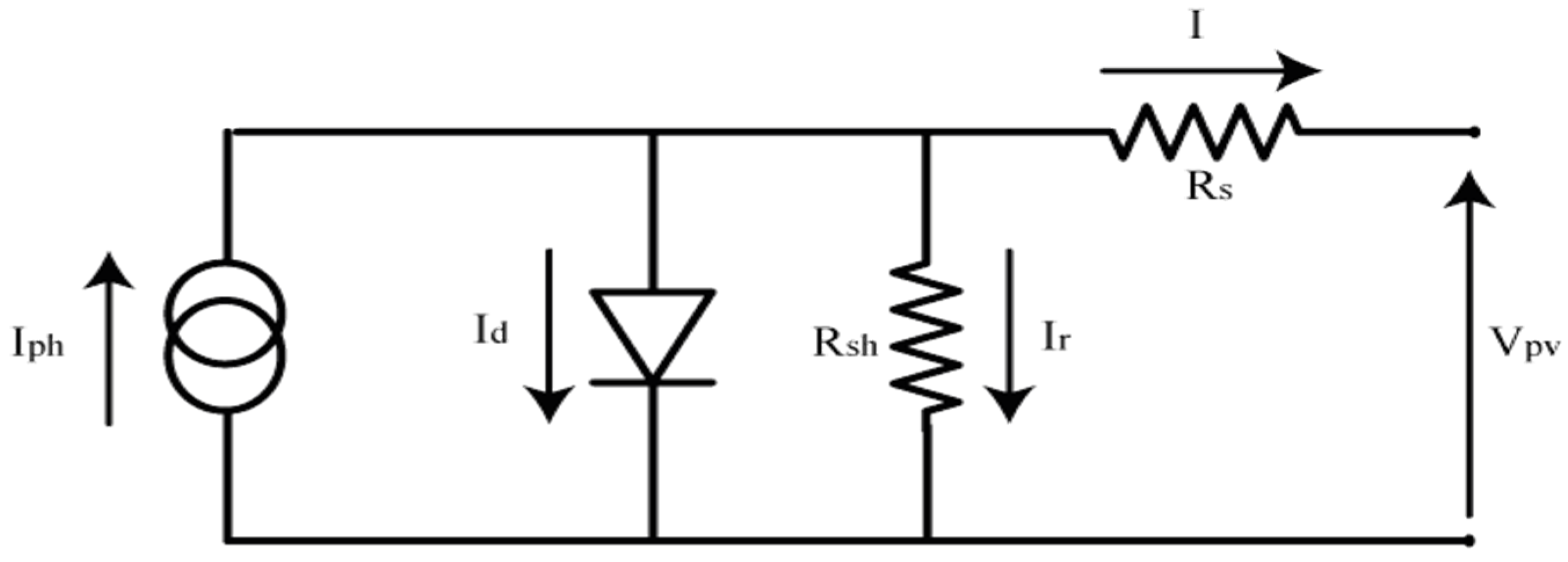
3.1. Photovoltaic System
3.2. Wind Turbine System
3.3. Battery Energy Storage Systems (BESSs)
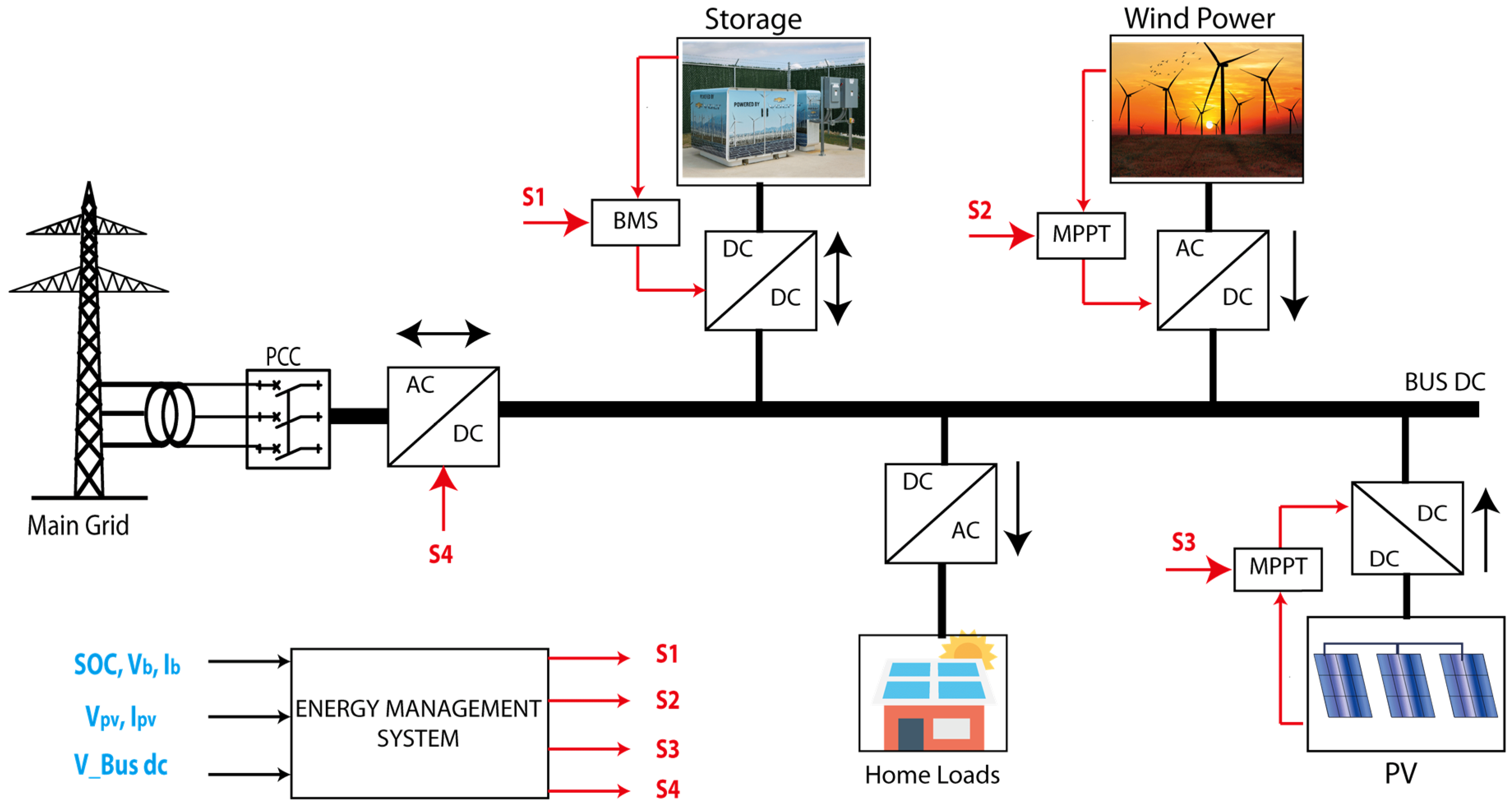
3.4. Energy Management System (EMS)
- To extract the greatest power from the photovoltaic solar system, it is connected to the DC bus via a DC/DC converter controlled by an MPPT block;
- To draw the most power from a wind turbine, multiple converters and an MPPT block are used to link it to the DC bus;
- The battery system is connected to the microgrid via BDC, and several controllers are used to operate it (PID, ANNC, and FL);
- The main grid, connected to the DC bus via an AC/DC converter, will only be used in an emergency (when renewable energy is insufficient), and the battery state of charge is less than 20%.
- To supply the energy demand;
- To increase the renewable energy produced;
- To maintain the microgrid bus’s balance, keep the DC bus’s voltage constant at 300 V and the AC bus’s frequency constant at 50 Hz;
- To avoid overcharging or discharging of the battery.
4. Control Design for the Microgrid
4.1. PID Controller Design
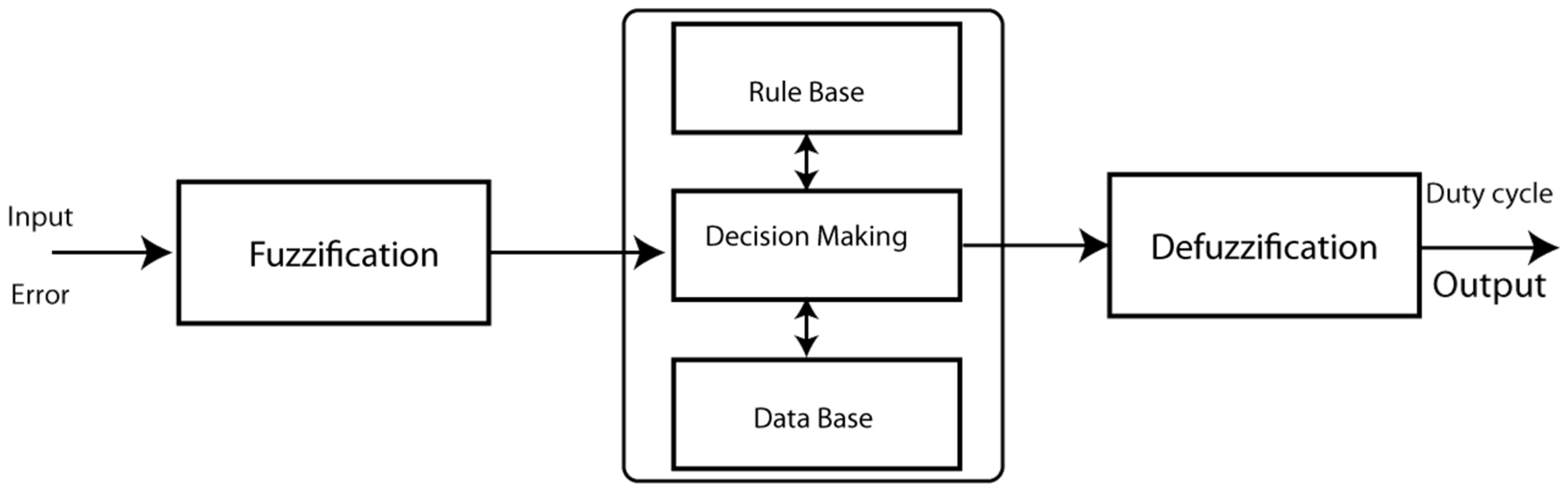
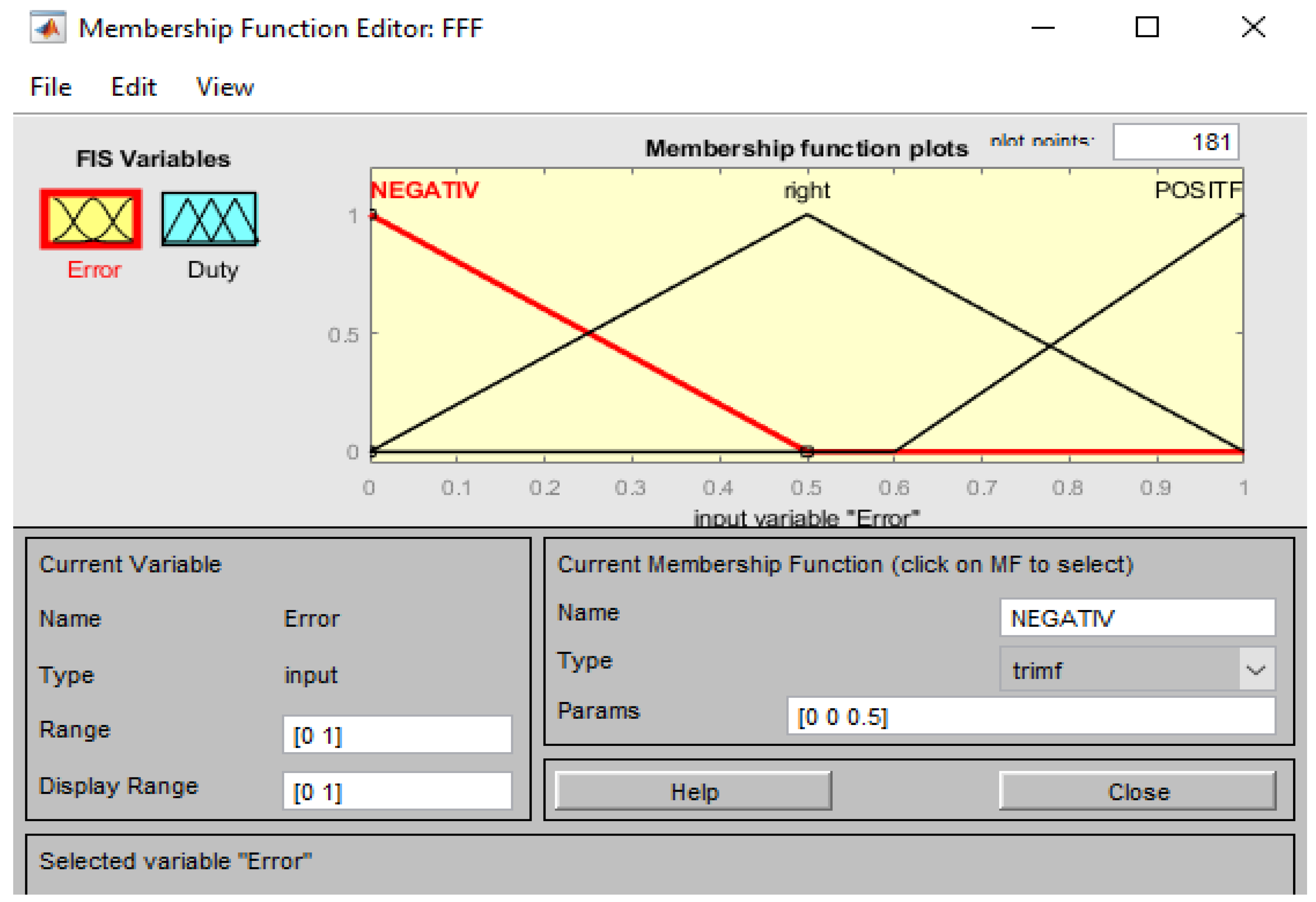
4.2. Fuzzy Logic Controller Design
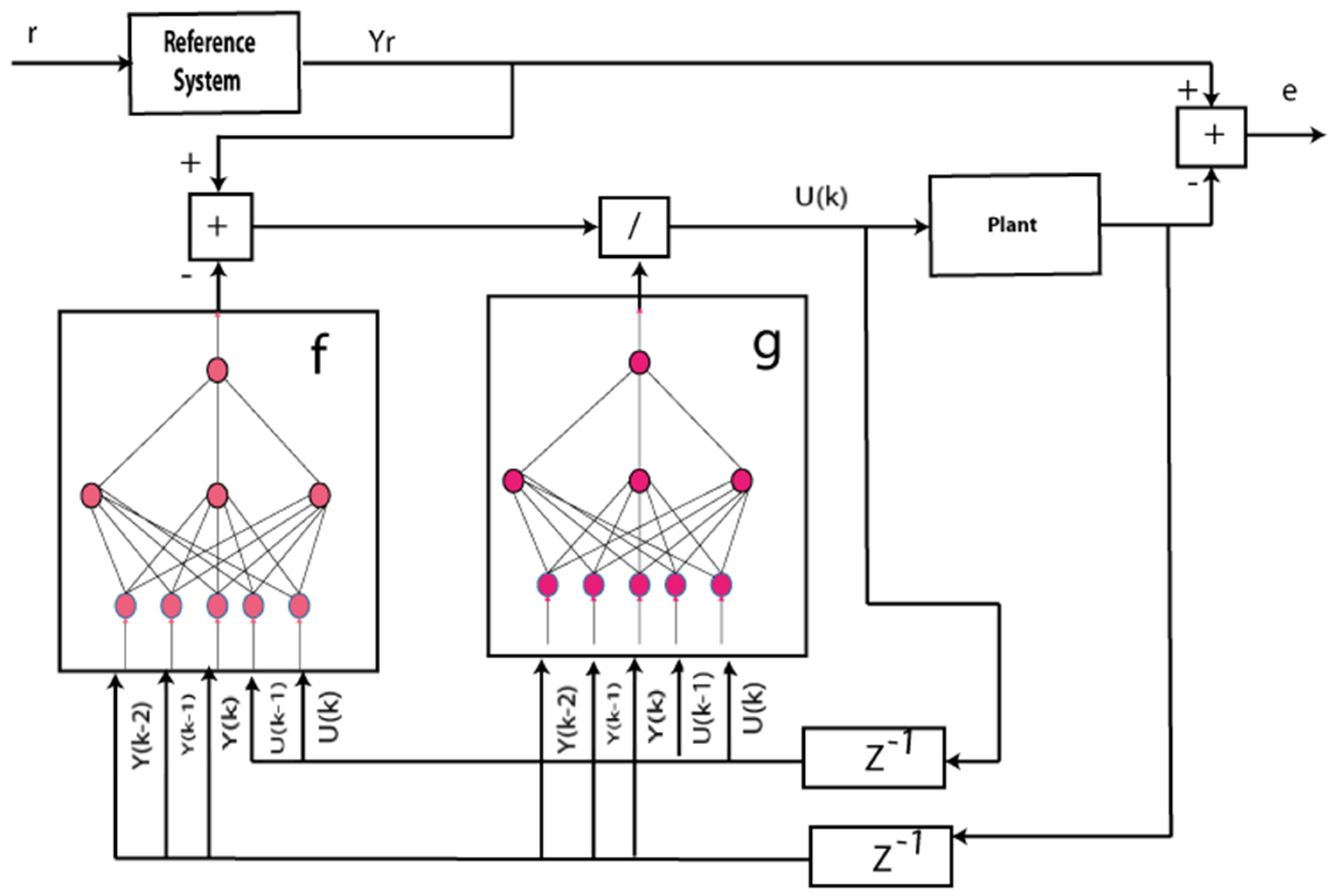
4.3. ANN Controller Design
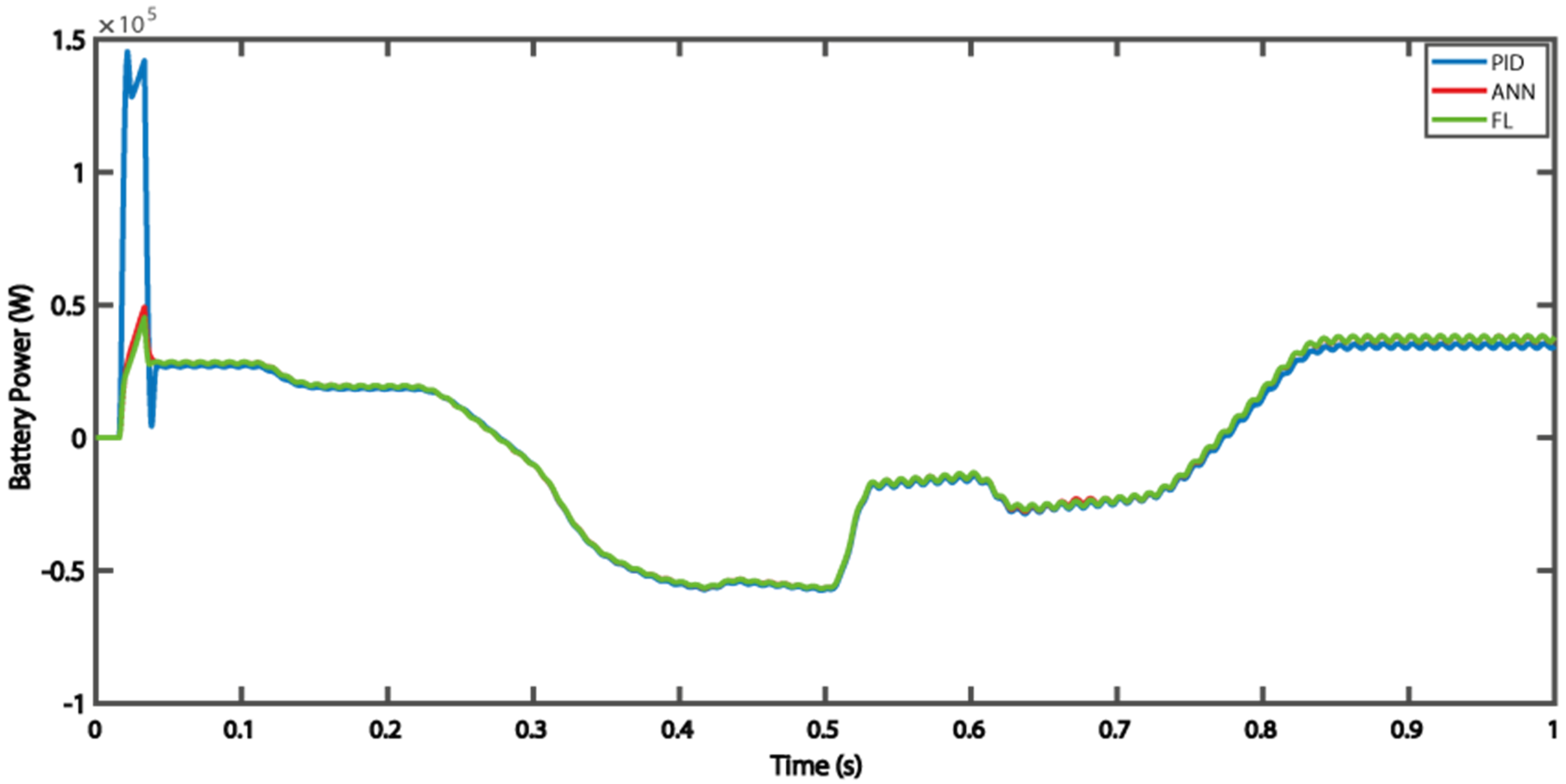
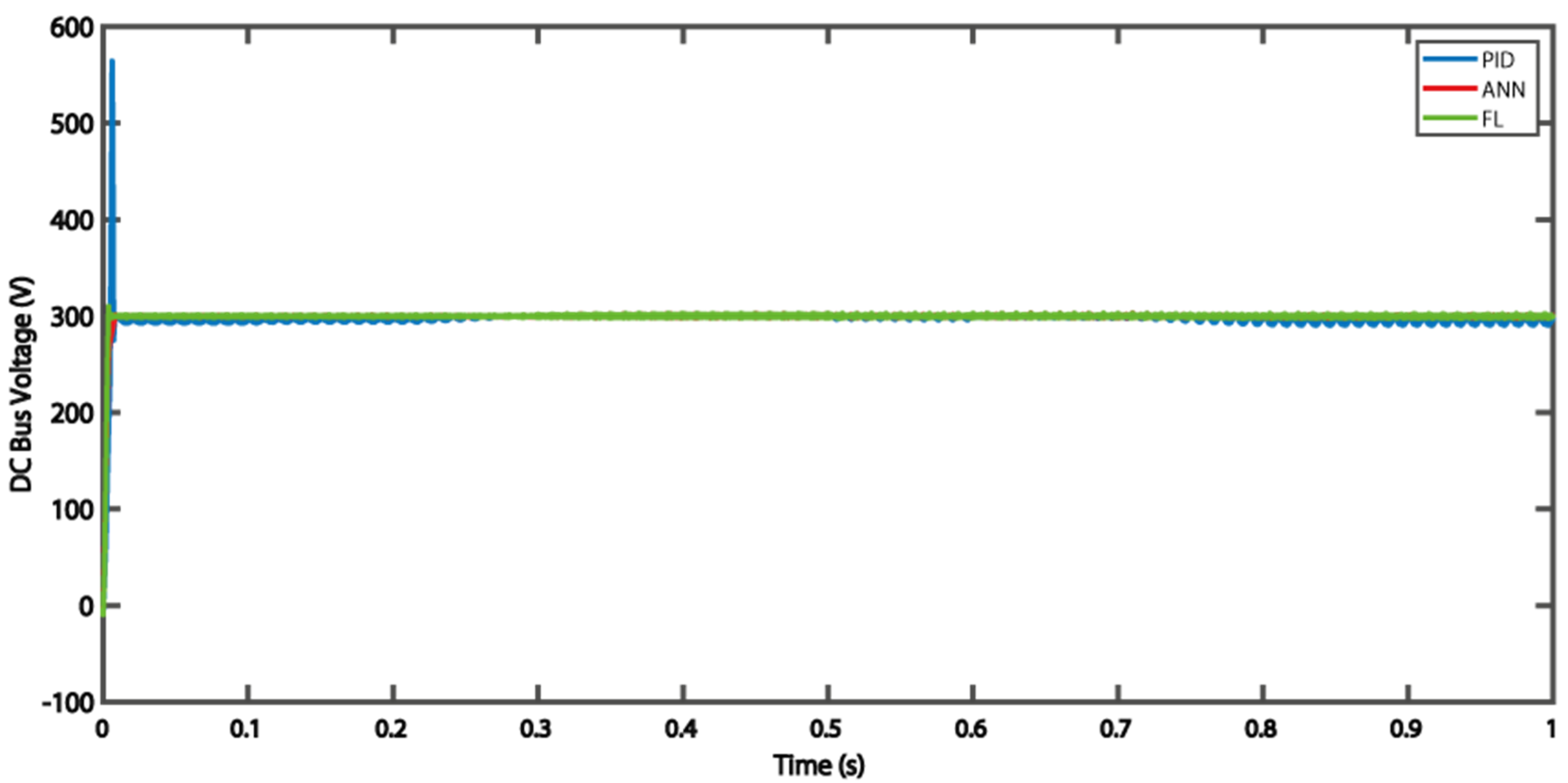
5. Simulation and Results
6. Conclusions
- Hardware implementation of the three methods (PID, ANN, and FL) to validate the performance in experimental processes;
- The integration of energy optimization (electricity, price, and CO2 emissions) in global management of the energy management system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial neural network |
| BESS | Battery energy storage system |
| CCP | Common coupling point |
| CC | Central controller |
| DG | Distributed generation |
| ESS | Energy storage system |
| EMS | Energy management system |
| FL | Fuzzy logic |
| LC | Local controller |
| MG | Microgrid |
| MPPT | Maximum power point tracking |
| RES | Renewable energy resource |
| RBFN | Radial basis function network |
| PID | Proportional-integral-derivative |
| PV | Photovoltaic |
| PWM | Pulsewidth modulation |
| SOC | State of charge |
References
- Molina, M.G. Energy storage and power electronics technologies: A strong combination to empower the transformation to the smart grid. Proc. IEEE 2017, 105, 2191–2219. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Sen, S.; Kumar, V. Microgrid control: A comprehensive survey. Annu. Rev. Control 2018, 45, 118–151. [Google Scholar] [CrossRef]
- Wei, X.; Xiangning, X.; Pengwei, C. Overview of key microgrid technologies. Int. Trans. Electr. Energy Syst. 2018, 28, e2566. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed control techniques in microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Roslan, M.F.; Hannan, M.A.; Ker, P.J.; Uddin, M.N. Microgrid control methods toward achieving sustainable energy management. Appl. Energy 2019, 240, 583–607. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hussain, S.A.; Abido, M.A. Modeling and control of microgrid: An overview. J. Frankl. Inst. 2014, 351, 2822–2859. [Google Scholar] [CrossRef]
- Lede, A.M.R.; Molina, M.G.; Martinez, M.; Mercado, P.E. Microgrid architectures for distributed generation: A brief review. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference-Latin America (ISGT Latin America), Quito, Ecuador, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Palizban, O.; Kauhaniemi, K.; Guerrero, J.M. Microgrids in active network management—Part II: System operation, power quality and protection. Renew. Sustain. Energy Rev. 2014, 36, 440–451. [Google Scholar] [CrossRef] [Green Version]
- Azeroual, M.; Lamhamdi, T.; El Moussaoui, H.; El Markhi, H. Simulation tools for a smart grid and energy management for microgrid with wind power using multi-agent system. Wind. Eng. 2020, 44, 661–672. [Google Scholar] [CrossRef]
- Mazidi, M.; Rezaei, N.; Ardakani, F.J.; Mohiti, M.; Guerrero, J.M. A hierarchical energy management system for islanded multi-microgrid clusters considering frequency security constraints. Int. J. Electr. Power Energy Syst. 2020, 121, 106134. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–8. [Google Scholar]
- Khorsandi, A.; Ashourloo, M.; Mokhtari, H. A decentralized control method for a low-voltage DC microgrid. IEEE Trans. Energy Convers. 2014, 29, 793–801. [Google Scholar] [CrossRef]
- Li, Y.; Sun, Z.; Han, L.; Mei, N. Fuzzy comprehensive evaluation method for energy management systems based on an Internet of Things. IEEE Access 2017, 5, 21312–21322. [Google Scholar] [CrossRef]
- Leonori, S.; Martino, A.; Mascioli, F.M.F.; Rizzi, A. Microgrid energy management systems design by computational intelligence techniques. Appl. Energy 2020, 277, 115524. [Google Scholar] [CrossRef]
- Ding, Z.; Hu, T.; Li, M.; Xu, X.; Zou, P.X. Agent-based model for simulating building energy management in student residences. Energy Build. 2019, 198, 11–27. [Google Scholar] [CrossRef]
- Mobashsher, M.M.; Keypour, R.; Savaghebi, M. Distributed optimal voltage control in islanded microgrids. Int. Trans. Electr. Energy Syst. 2021, 31, e13045. [Google Scholar] [CrossRef]
- Barik, A.K.; Das, D.C.; Latif, A.; Hussain, S.M.; Ustun, T.S. Optimal Voltage–Frequency Regulation in Distributed Sustainable Energy-Based Hybrid Microgrids with Integrated Resource Planning. Energies 2021, 14, 2735. [Google Scholar] [CrossRef]
- Arfeen, Z.A.; Khairuddin, A.B.; Larik, R.M.; Saeed, M.S. Control of distributed generation systems for microgrid applications: A technological review. Int. Trans. Electr. Energy Syst. 2019, 29, e12072. [Google Scholar] [CrossRef] [Green Version]
- Abdolrasol, M.G.M.; Hannan, M.A.; Hussain, S.M.; Ustun, T.S.; Sarker, M.R.; Ker, P.J. Energy Management Scheduling for Microgrids in the Virtual Power Plant System Using Artificial Neural Networks. Energies 2021, 14, 6507. [Google Scholar] [CrossRef]
- Kasimalla, V.K.; Velisala, V. A review on energy allocation of fuel cell/battery/ultracapacitor for hybrid electric vehicles. Int. J. Energy Res. 2018, 42, 4263–4283. [Google Scholar] [CrossRef]
- Ramya, K.C.; Jegathesan, V. Comparison of pi and PID controlled bidirectional dc-dc converter systems. Int. J. Power Electron. Drive Syst. 2016, 7, 56. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Yuan, X.; Ji, B.; Wang, P.; Tian, H. Design of a fractional order PID controller for hydraulic turbine regulating system using chaotic non-dominated sorting genetic algorithm II. Energy Convers. Manag. 2014, 84, 390–404. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Yang, C.; Wu, D. A novel interval dynamic reliability computation approach for the risk evaluation of vibration active control systems based on PID controllers. Appl. Math. Model. 2021, 92, 422–446. [Google Scholar] [CrossRef]
- Bakar, N.N.A.; Hassan, M.Y.; Sulaima, M.F.; Na’im Mohd Nasir, M.; Khamis, A. Microgrid and load shedding scheme during islanded mode: A review. Renew. Sustain. Energy Rev. 2017, 71, 161–169. [Google Scholar] [CrossRef]
- Boujoudar, Y.; Azeroual, M.; El Moussaoui, H.; Lamhamdi, T. Intelligent controller based energy management for stand-alone power system using artificial neural network. Int. Trans. Electr. Energy Syst. 2020, 30, e12579. [Google Scholar] [CrossRef]
- Albarakati, A.J.; Boujoudar, Y.; Azeroual, M.; Jabeur, R.; Aljarbouh, A.; El Moussaoui, H.; Ouaaline, N. Real-Time Energy Management for DC Microgrids Using Artificial Intelligence. Energies 2021, 14, 5307. [Google Scholar] [CrossRef]
- Hernández, L.; Baladrón, C.; Aguiar, J.M.; Carro, B.; Sánchez-Esguevillas, A.; Lloret, J. Artificial neural networks for short-term load forecasting in microgrids environment. Energy 2014, 75, 252–264. [Google Scholar] [CrossRef]
- Chettibi, N.; Mellit, A.; Sulligoi, G.; Pavan, A.M. Adaptive neural network-based control of a hybrid AC/DC microgrid. IEEE Trans. Smart Grid 2016, 9, 1667–1679. [Google Scholar] [CrossRef] [Green Version]
- Rezvani, A.; Esmaeily, A.; Etaati, H.; Mohammadinodoushan, M. Intelligent hybrid power generation system using new hybrid fuzzy-neural for photovoltaic system and RBFNSM for wind turbine in the grid connected mode. Front. Energy 2019, 13, 131–148. [Google Scholar] [CrossRef]
- Kazemlou, S.; Mehraeen, S. Decentralized discrete-time adaptive neural network control of interconnected DC distribution system. IEEE Trans. Smart Grid 2014, 5, 2496–2507. [Google Scholar] [CrossRef]
- Lopez-Garcia, T.B.; Coronado-Mendoza, A.; Domínguez-Navarro, J.A. Artificial neural networks in microgrids: A review. Eng. Appl. Artif. Intell. 2020, 95, 103894. [Google Scholar] [CrossRef]
- Kala, H.; Deepakraj, D.; Gopalakrishnan, P.; Vengadesan, P.; Iyyar, M.K. Performance evaluation of fuzzy logic and PID controller for liquid level process. Perform. Eval. 2014, 2, 1311–1314. [Google Scholar]
- Ray, P.K.; Paital, S.R.; Mohanty, A.; Eddy, F.Y.; Gooi, H.B. A robust power system stabilizer for enhancement of stability in power system using adaptive fuzzy sliding mode control. Appl. Soft. Comput. 2018, 73, 471–481. [Google Scholar] [CrossRef]
- Vivas, F.J.; Segura, F.; Andújar, J.M.; Palacio, A.; Saenz, J.L.; Isorna, F.; López, E. Multi-objective fuzzy logic-based energy management system for microgrids with battery and hydrogen energy storage system. Electronics 2020, 9, 1074. [Google Scholar] [CrossRef]
- Rodriguez, M.; Arcos-Aviles, D.; Llanos, J.; Salazar, A.; Guinjoan, F.; Motoasca, E.; Martinez, W. Fuzzy-based energy management system for isolated microgrids using generation and demand forecast. In Proceedings of the 2021 23rd European Conference on Power Electronics and Applications (EPE’21 ECCE Europe), Online, 3–7 May 2021; pp. 1–10. [Google Scholar]
- Arcos-Aviles, D.; Pascual, J.; Marroyo, L.; Sanchis, P.; Guinjoan, F. Fuzzy logic-based energy management system design for residential grid-connected microgrids. IEEE Trans. Smart Grid 2016, 9, 530–543. [Google Scholar] [CrossRef] [Green Version]
- Elmouatamid, A.; Ouladsine, R.; Bakhouya, M.; El Kamoun, N.; Khaidar, M.; Zine-Dine, K. Review of Control and Energy Management Approaches in Micro-Grid Systems. Energies 2021, 14, 168. [Google Scholar] [CrossRef]
- Mousa, H.H.; Youssef, A.R.; Mohamed, E.E. State of the art perturb and observe MPPT algorithms-based wind energy conversion systems: A technology review. Int. J. Electr. Power Energy Syst. 2021, 126, 106598. [Google Scholar] [CrossRef]
- Kushwaha, A.; Gopal, M.; Singh, B. Q-learning based maximum power extraction for wind energy conversion system with variable wind speed. IEEE Trans. Energy Convers. 2020, 35, 1160–1170. [Google Scholar] [CrossRef]
- Shi, Q.; Lam, H.K.; Xuan, C.; Chen, M. Adaptive neuro-fuzzy PID controller based on twin delayed deep deterministic policy gradient algorithm. Neurocomputing 2020, 402, 183–194. [Google Scholar] [CrossRef]
- Parikh, P.; Sheth, S.; Vasani, R.; Gohil, J.K. Implementing Fuzzy Logic Controller and PID Controller to a DC Encoder Motor—“A case of an Automated Guided Vehicle”. Proc. Manuf. 2018, 20, 219–226. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Techniques | Advantages | Disadvantages |
|---|---|---|
| PID Controller |
|
|
|
|
|
|
|
|
| Parameters | Values |
|---|---|
| Maximum power | 250 W |
| Maximum power voltage | 42.8 V |
| Maximum power current | 5.84 A |
| Open circuit voltage | 50.93 V |
| Current court-circuit | 6.2 A |
| Cellule numbers | 72 |
| Temperature coefficient of open-circuit voltage | −0.29103%/°C |
| Temperature Coefficient of current court-circuit | 0.013306%/°C |
| Shunt resistance | 448.6949 ohms |
| Series resistance | 0.37759 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al Sumarmad, K.A.; Sulaiman, N.; Wahab, N.I.A.; Hizam, H. Energy Management and Voltage Control in Microgrids Using Artificial Neural Networks, PID, and Fuzzy Logic Controllers. Energies 2022, 15, 303. https://doi.org/10.3390/en15010303
Al Sumarmad KA, Sulaiman N, Wahab NIA, Hizam H. Energy Management and Voltage Control in Microgrids Using Artificial Neural Networks, PID, and Fuzzy Logic Controllers. Energies. 2022; 15(1):303. https://doi.org/10.3390/en15010303
Chicago/Turabian StyleAl Sumarmad, Khaizaran Abdulhussein, Nasri Sulaiman, Noor Izzri Abdul Wahab, and Hashim Hizam. 2022. "Energy Management and Voltage Control in Microgrids Using Artificial Neural Networks, PID, and Fuzzy Logic Controllers" Energies 15, no. 1: 303. https://doi.org/10.3390/en15010303